
Robust Moth-Inspired Algorithm for Odor Source Localization Using Multimodal Information


Abstract
:1. Introduction
2. Problem Statement
3. Biological Experiment for Odor-Source Localization Behavior Analysis
3.1. Study Insect
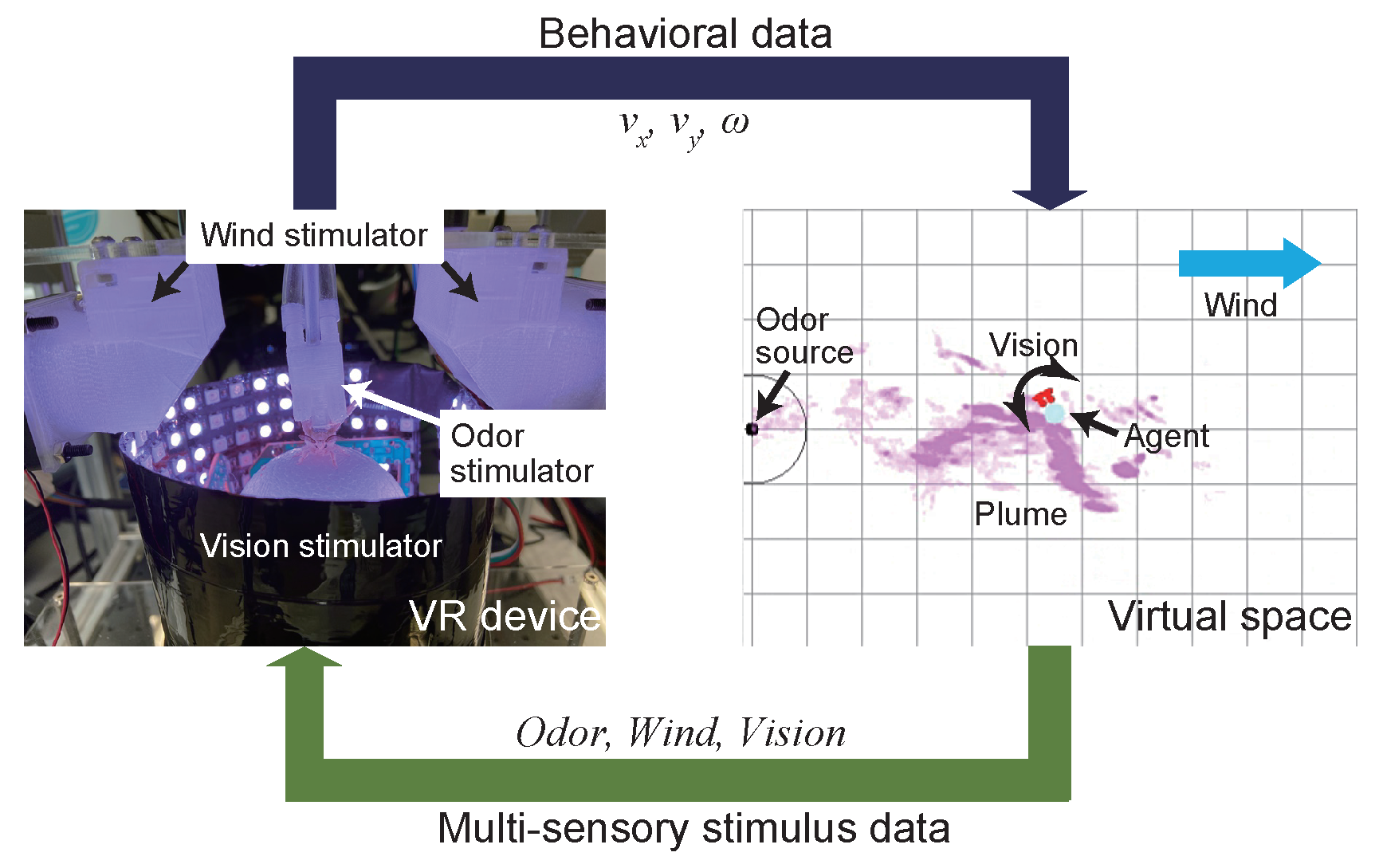
3.2. Experimental Setup and Design
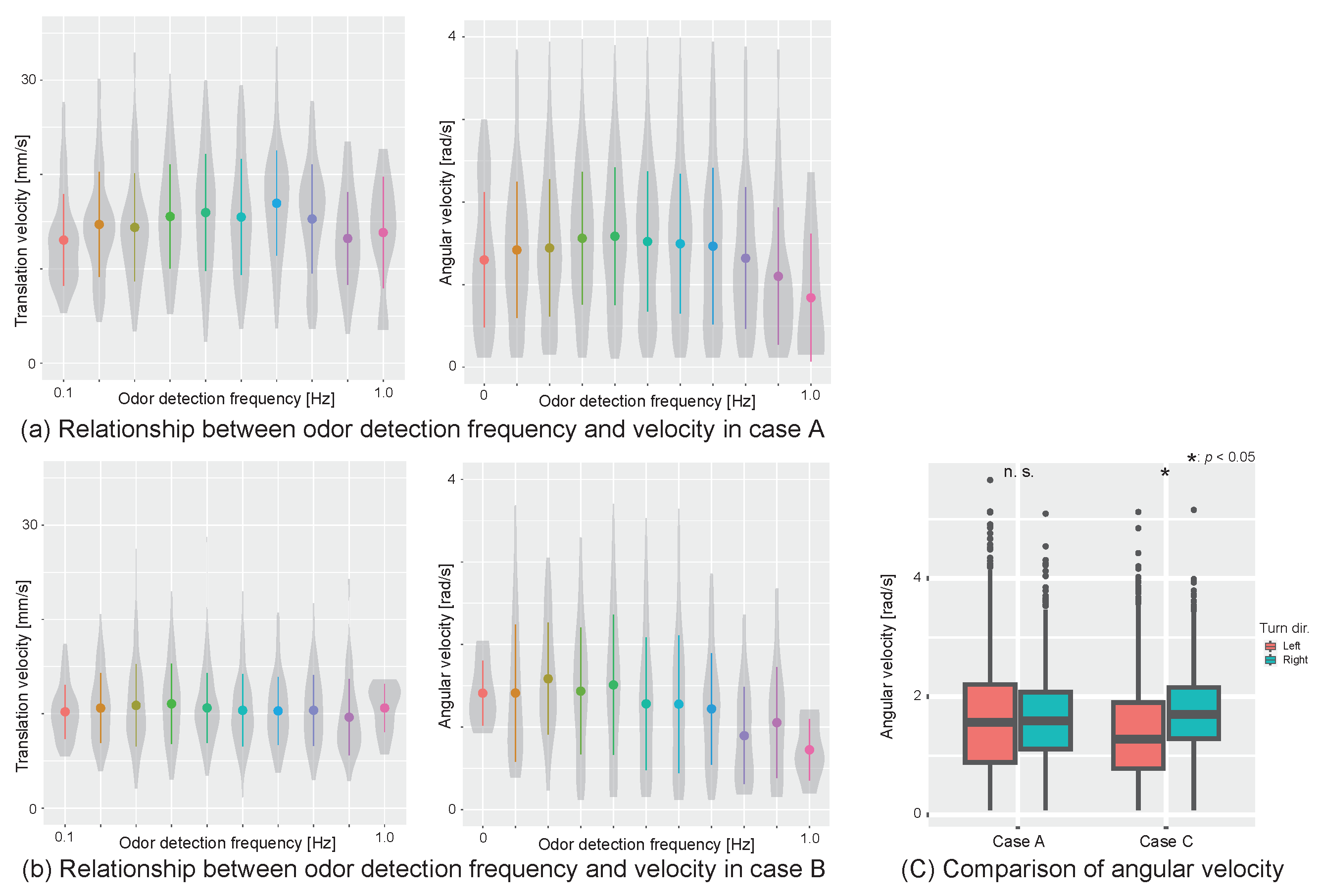
3.3. Extraction of Behavioral Modulation
4. Algorithm Performance Verification Experiment
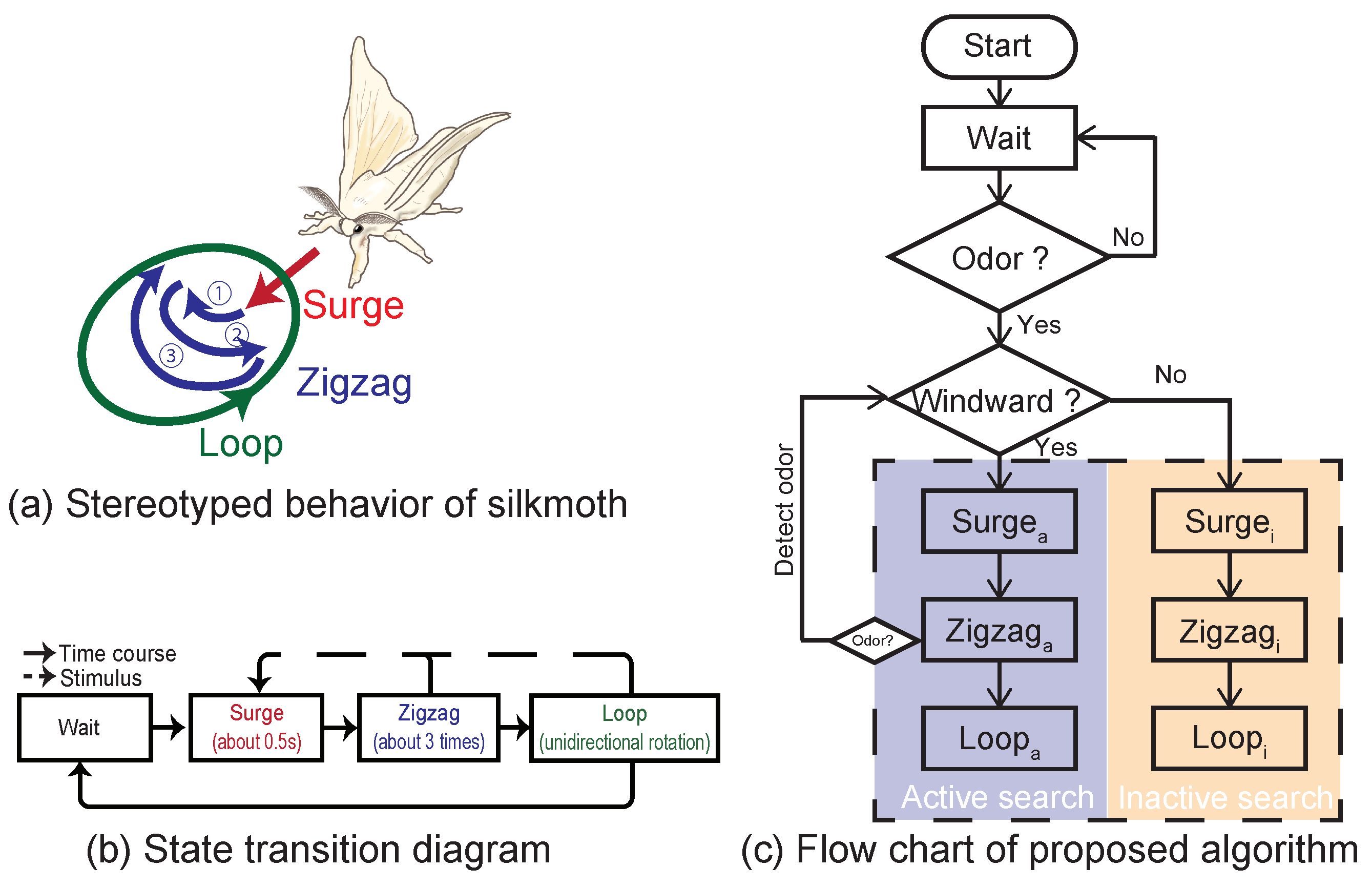
4.1. Robust Moth-Inspired Algorithm
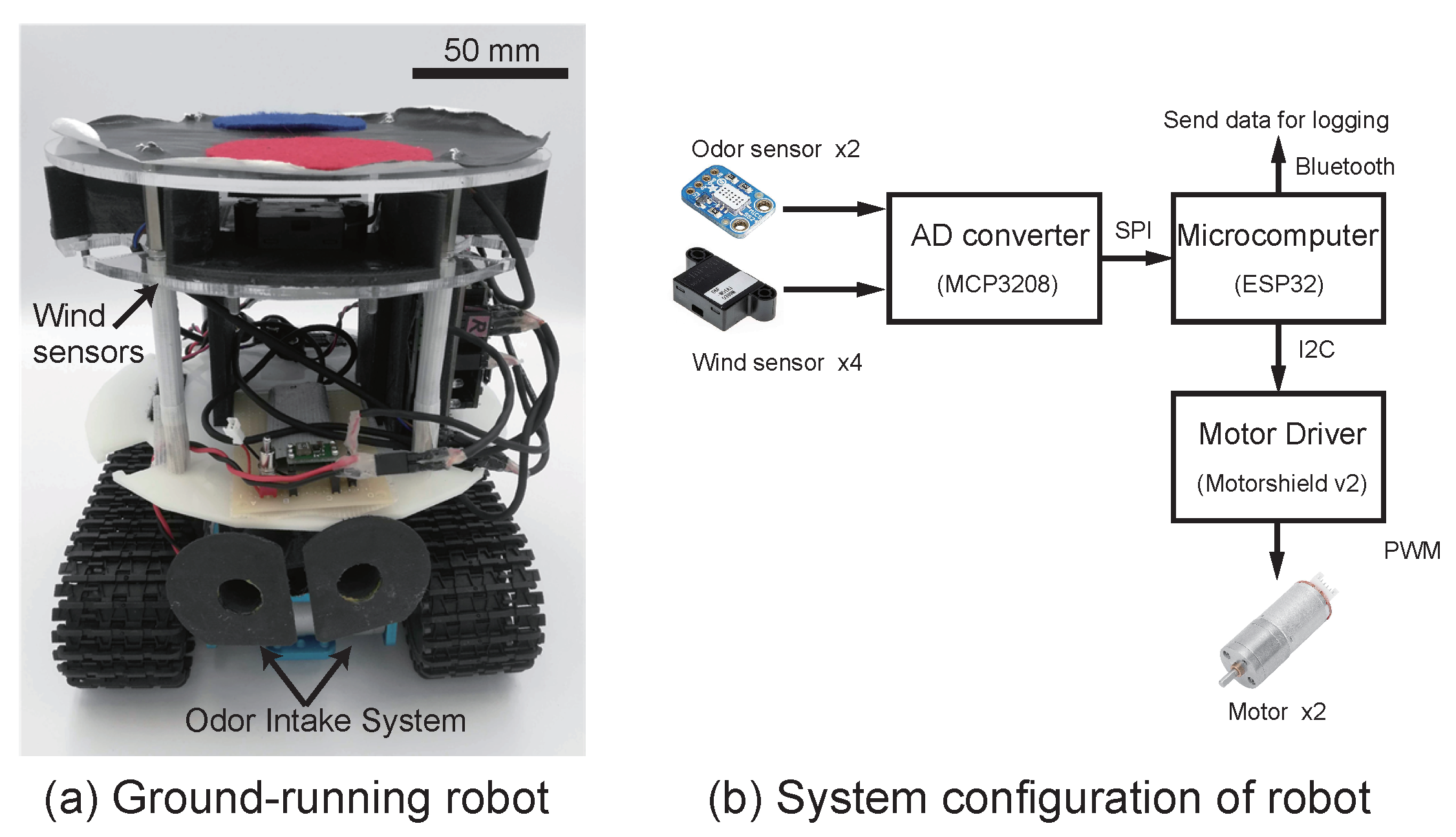
4.2. Mobile Robot Configuration
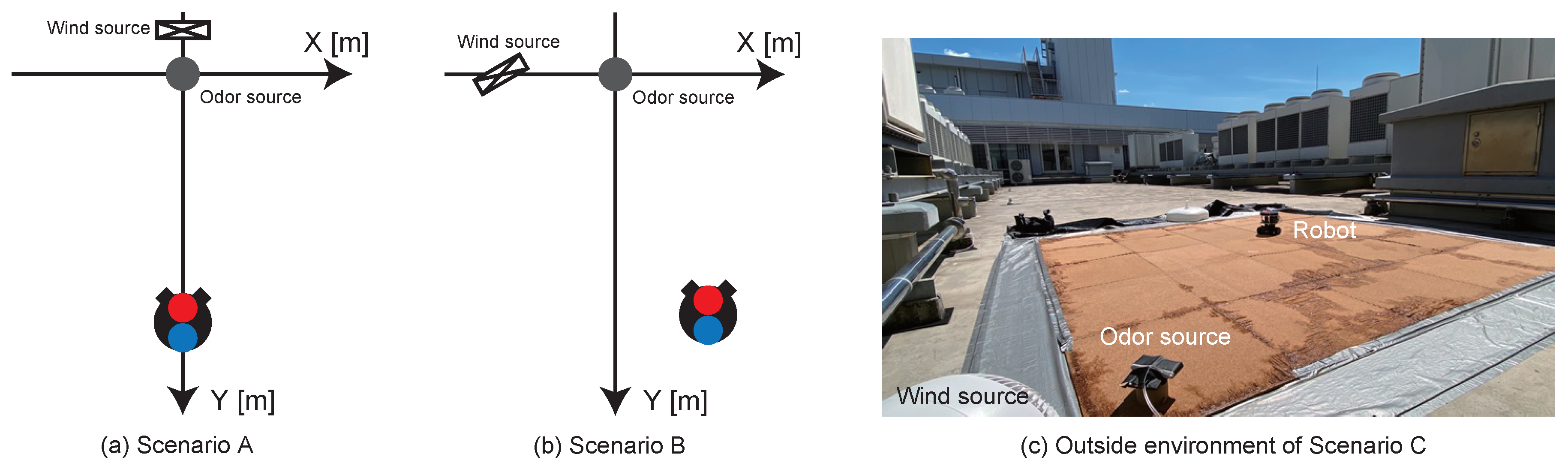
4.3. Experiment Field Condition
- Scenario A: Wind is generated from the same direction as the odor source in an indoor environment (Figure 5a).
- Scenario B: The fan generates airflow from a different direction from the odor source in an indoor environment (Figure 5b).
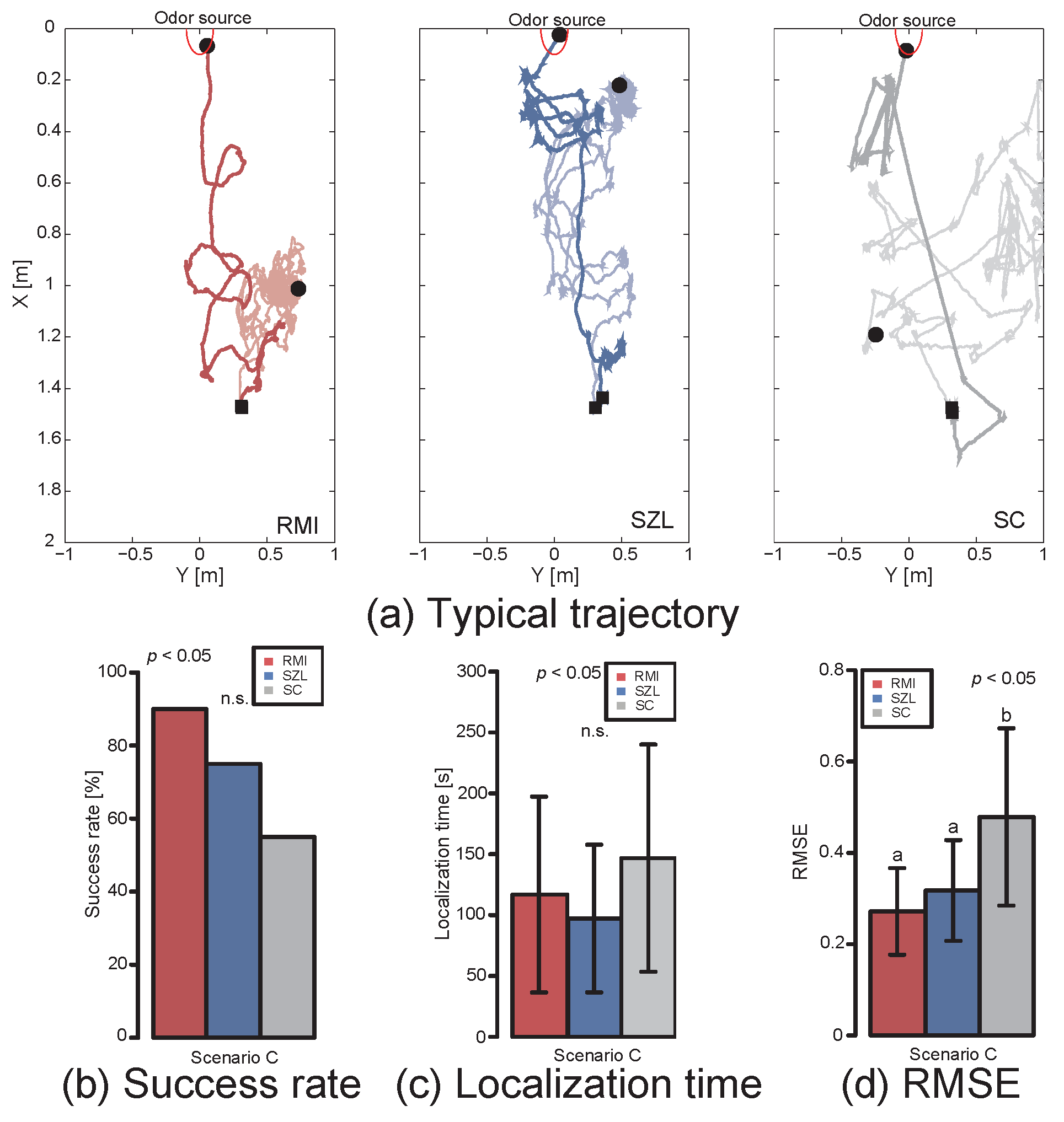
- Scenario C: Experiment in an outdoor environment (Figure 5c).
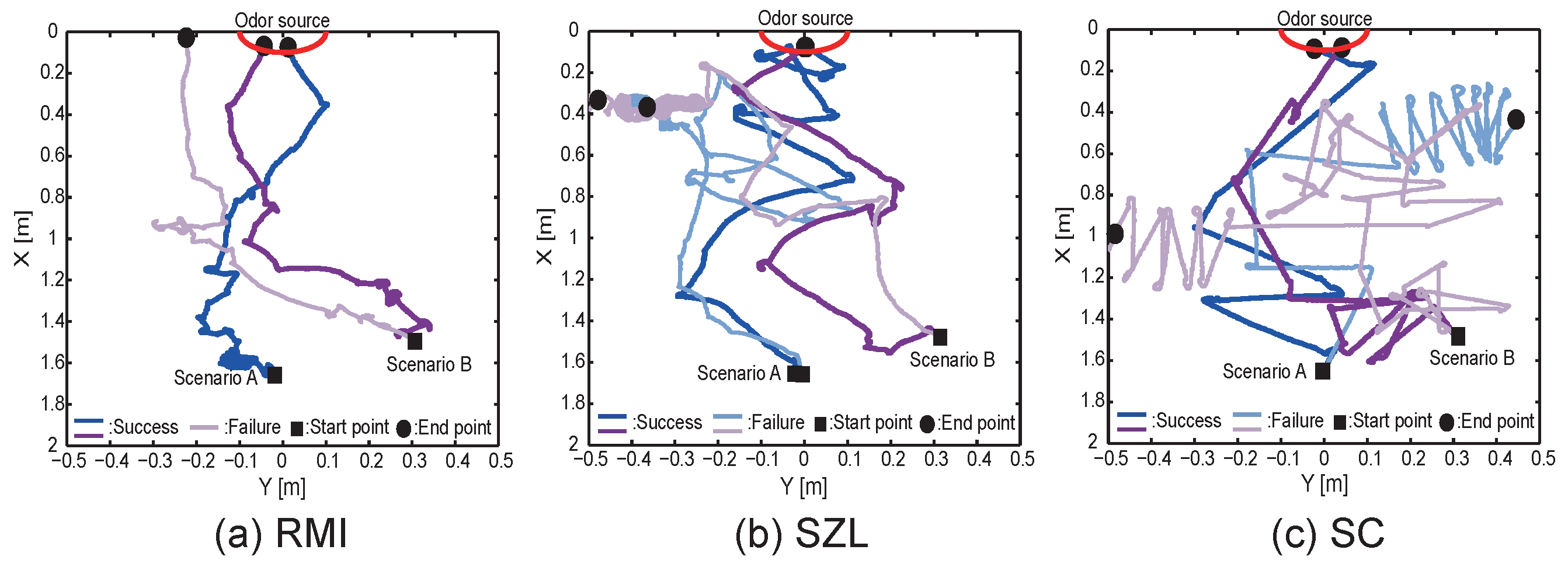
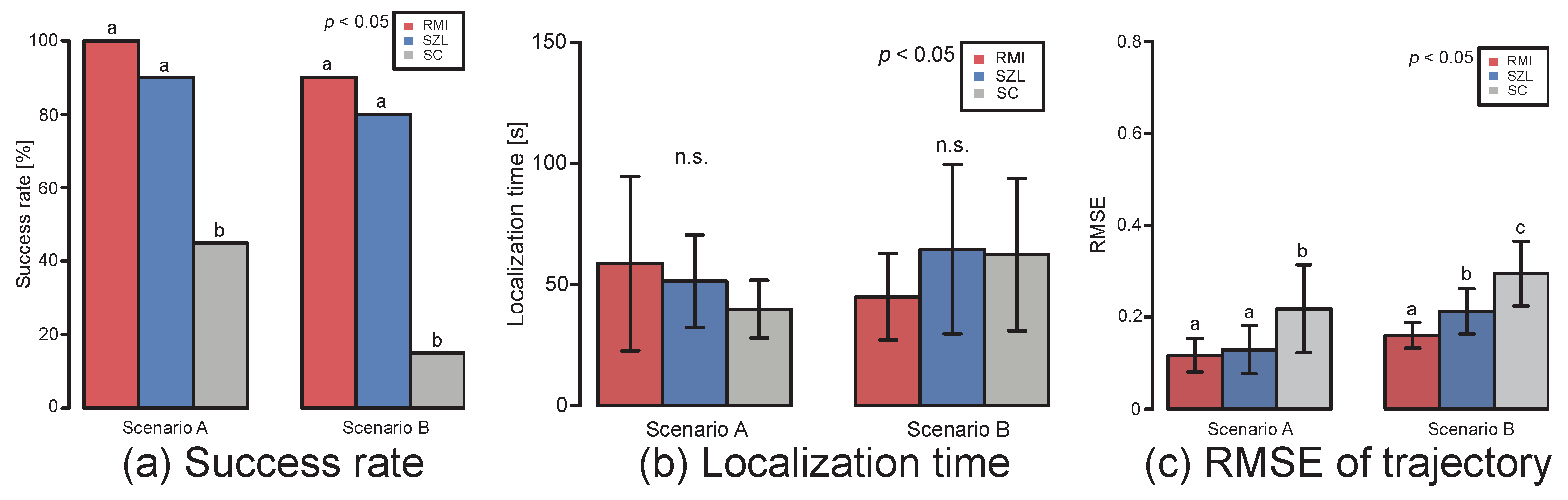
4.4. Experiment Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
Abbreviations
| VR | Virtual Reality |
| RMI | Robust Moth-Inspired |
| SZL | Surge-zigzag-loop |
| SC | Surge-Cast |
| RMSE | Root Mean Squared Error |
References
- Beebe, S.C.; Howell, T.J.; Bennett, P.C. Using scent detection dogs in conservation settings: A review of scientific literature regarding their selection. Front. Vet. Sci. 2016, 3, 96. [Google Scholar] [CrossRef] [Green Version]
- Michel, R. Pheromones and general odor perception in insects. Neurobiol. Chem. Commun. 2014, 1, 23–56. [Google Scholar]
- Chen, X.X.; Huang, J. Odor source localization algorithms on mobile robots: A review and future outlook. Robot. Auton. Syst. 2019, 112, 123–136. [Google Scholar] [CrossRef]
- Jing, T.; Meng, Q.H.; Ishida, H. Recent Progress and Trend of Robot Odor Source Localization. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 938–953. [Google Scholar] [CrossRef]
- Naik, H.; Bastien, R.; Navab, N.; Couzin, I.D. Animals in Virtual Environments. IEEE Trans. Vis. Comput. Graph. 2020, 26, 2073–2083. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kumar, K.P.; Renz, M.; Olsson, S.B. Characterizing long-range search behavior in Diptera using complex 3D virtual environments. Proc. Natl. Acad. Sci. USA 2020, 117, 12201–12207. [Google Scholar]
- Ando, N.; Shidara, H.; Hommaru, N.; Ogawa, H. Auditory Virtual Reality for Insect Phonotaxis. J. Robot. Mechatron. 2021, 33, 494–504. [Google Scholar] [CrossRef]
- Yamada, M.; Ohashi, H.; Hosoda, K.; Kurabayashi, D.; Shigaki, S. Multisensory-motor integration in olfactory navigation of silkmoth, Bombyx mori, using virtual reality system. eLife 2021, 10, e72001. [Google Scholar] [CrossRef]
- Balkovsky, E.; Shraiman, B.I. Olfactory search at high Reynolds number. Proc. Natl. Acad. Sci. USA 2002, 99, 12589–12593. [Google Scholar] [CrossRef] [Green Version]
- Harvey, D.J.; Lu, T.F.; Keller, M.A. Comparing insect-inspired chemical plume tracking algorithms using a mobile robot. IEEE Trans. Robot. 2008, 24, 307–317. [Google Scholar] [CrossRef]
- Butenandt, A.; Beckamnn, R.; Hecker, E. Uber den sexuallockstoff des seidenspinners, i. der biologische test und die isolierung des reinen sexuallockstoffes bombykol. Hoppe-Seylers Z. Physiol. Chem. 1961, 324, 71–83. [Google Scholar]
- Kanzaki, R.; Sugi, N.; Shibuya, T. Self-generated zigzag turning of Bombyx mori males during pheromone-mediated upwind walking. Zool. Sci. 1992, 9, 515–527. [Google Scholar]
- Pansopha, P.; Ando, N.; Kanzaki, R. Dynamic use of optic flow during pheromone tracking by the male silkmoth, Bombyx mori. J. Exp. Biol. 2014, 217, 1811–1820. [Google Scholar] [CrossRef] [Green Version]
- Shigaki, S.; Sakurai, T.; Ando, N.; Kurabayashi, D.; Kanzaki, R. Time-Varying Moth-Inspired Algorithm for Chemical Plume Tracing in Turbulent Environment. IEEE Robot. Autom. Lett. 2018, 3, 76–83. [Google Scholar] [CrossRef]
- Gatellier, L.; Nagao, T.; Kanzaki, R. Serotonin modifies the sensitivity of the male silkmoth to pheromone. J. Exp. Biol. 2004, 207, 2487–2496. [Google Scholar] [CrossRef] [Green Version]
- Carrel, J.S. An improved treading device for tethered insects. Science 1972, 175, 1279. [Google Scholar] [CrossRef]
- Willis, M.A.; Arbas, E.A. Odor-modulated upwind flight of the sphinx moth, Manduca sexta L. J. Comp. Physiol. A 1991, 169, 427–440. [Google Scholar] [CrossRef]
- Shigaki, S.; Haigo, S.; Reyes, C.H.; Sakurai, T.; Kanzaki, R.; Kurabayashi, D.; Sezutsu, H. Analysis of the role of wind information for efficient chemical plume tracing based on optogenetic silkworm moth behavior. Bioinspiration Biomim. 2019, 14, 046006. [Google Scholar] [CrossRef]
- Demir, M.; Kadakia, N.; Anderson, H.D.; Clark, D.A.; Emonet, T. Walking Drosophila navigate complex plumes using stochastic decisions biased by the timing of odor encounters. eLife 2020, 9, e57524. [Google Scholar] [CrossRef]
- Obara, Y. Bombyx mori mationg dance: An essential in locationg the female. Appl. Entomol. Zool. 1979, 14, 130–132. [Google Scholar] [CrossRef] [Green Version]
- Loudon, C.; Koehl, M.A. Sniffing by a silkworm moth: Wing fanning enhances air penetration through and pheromone interception by antennae. J. Exp. Biol. 2000, 203, 2977–2990. [Google Scholar] [CrossRef] [PubMed]
- Shigaki, S.; Fikri, M.R.; Kurabayashi, D. Design and experimental evaluation of an odor sensing method for a pocket-sized quadcopter. Sensors 2018, 18, 3720. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shigaki, S.; Minakawa, N.; Yamada, M.; Ohashi, H.; Kurabayashi, D.; Hosoda, K. Animal-in-the-loop System with Multimodal Virtual Reality to Elicit Natural Olfactory Localization Behavior. Sens. Mater. 2021, 33, 4211–4228. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stimulation | Odor | Wind | Vision | |
|---|---|---|---|---|
| Case | ||||
| A | + | + | + | |
| B | + | − | + | |
| C | + | + | − | |
| Active Mode | Inactive Mode | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| f [Hz] | f [Hz] | ||||||||||
| ≤0.7 | 53.6 | 0.888 | 129 | 1.82 | ≤0.7 | 0.0 | 1.13 | 105 | 1.85 | ||
| >0.7 | −114 | 246 | −1.59 | 2.81 | >0.7 | 0.0 | −1.30 | 105 | 2.34 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shigaki, S.; Yamada, M.; Kurabayashi, D.; Hosoda, K. Robust Moth-Inspired Algorithm for Odor Source Localization Using Multimodal Information. Sensors 2023, 23, 1475. https://doi.org/10.3390/s23031475
Shigaki S, Yamada M, Kurabayashi D, Hosoda K. Robust Moth-Inspired Algorithm for Odor Source Localization Using Multimodal Information. Sensors. 2023; 23(3):1475. https://doi.org/10.3390/s23031475
Chicago/Turabian StyleShigaki, Shunsuke, Mayu Yamada, Daisuke Kurabayashi, and Koh Hosoda. 2023. "Robust Moth-Inspired Algorithm for Odor Source Localization Using Multimodal Information" Sensors 23, no. 3: 1475. https://doi.org/10.3390/s23031475
APA StyleShigaki, S., Yamada, M., Kurabayashi, D., & Hosoda, K. (2023). Robust Moth-Inspired Algorithm for Odor Source Localization Using Multimodal Information. Sensors, 23(3), 1475. https://doi.org/10.3390/s23031475