
Towards Real-Time Hyperspectral Multi-Image Super-Resolution Reconstruction Applied to Histological Samples

 ,
,  , ,
, ,  ,
,  ,
, 
Abstract
:1. Introduction
- The input is based on continuous natural scenes, well approximated as band-limited signals.
- Naturally, these signals can be contaminated by the laying medium between the scene and the sensor (including the optics), or by the movement of one of the two. However, the result is, in any case, an effective motion between the sensor and the scene to be captured, leading to multiple frames of the scene connected by local and/or global shifts.
- There are different types of blurring effects that can affect the image in its process of going through the camera system into the image sensors. The most important one is the down-sampling of the image into pixels.
- These down-sampled images are further affected by the sensor noise.
Background Work
- Very large processing needs as the number of bands increases, which is not always affordable in embedded applications.
- Not using inter-band information to improve the result, while an effective SR reconstruction would improve with frequency aliasing in the LR images [29].
2. Materials and Methods
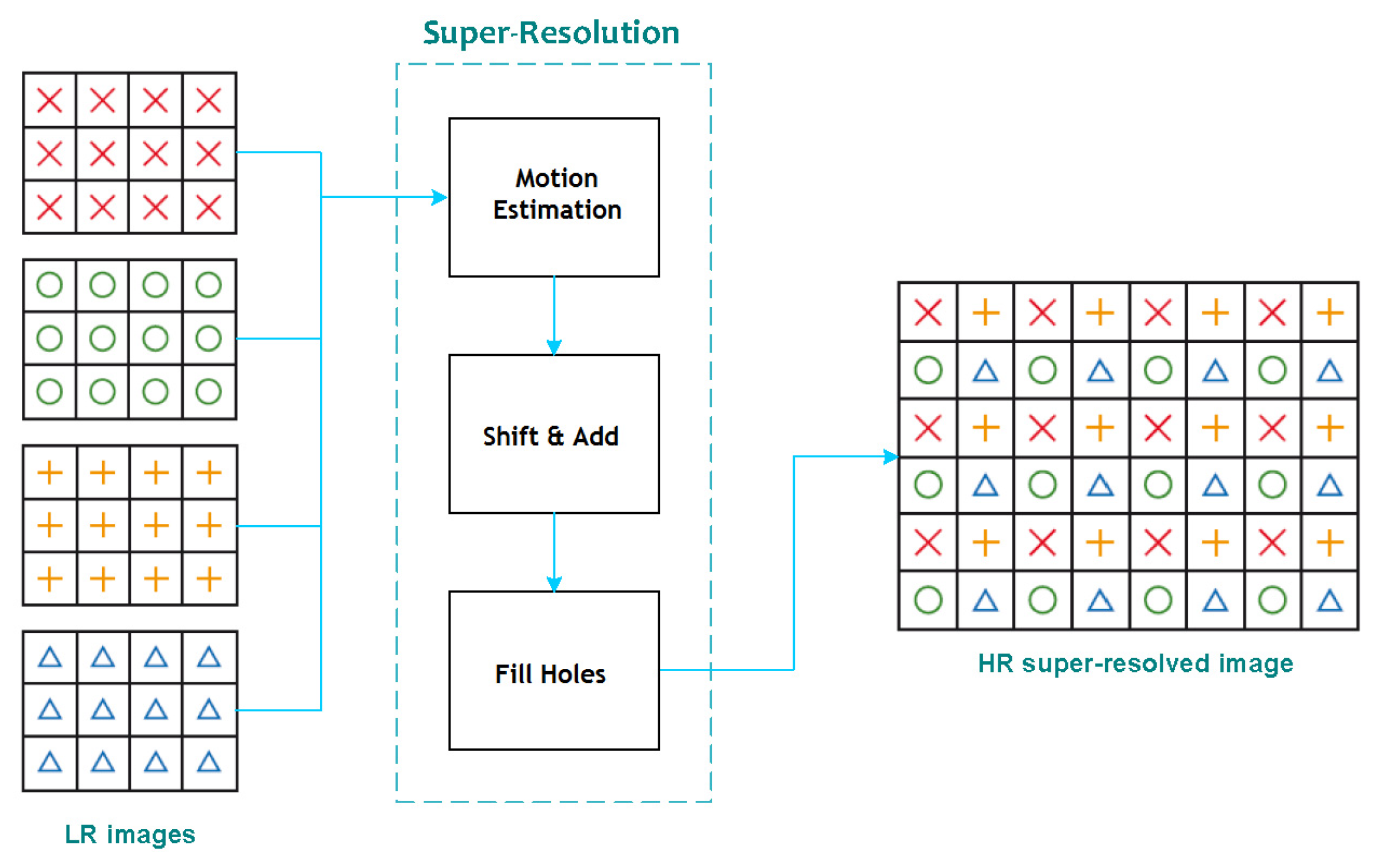
- Capturing a sequence of images from the same scene with sub-pixel shifts between each of them (acquisition).
- Estimating the sub-pixel shift between the image taken as reference for reconstruction and the rest of the sequence (motion estimation or fusion planning)
- Reconstructing the HR image (restoration).
2.1. HS Image Capturing: Acquisition
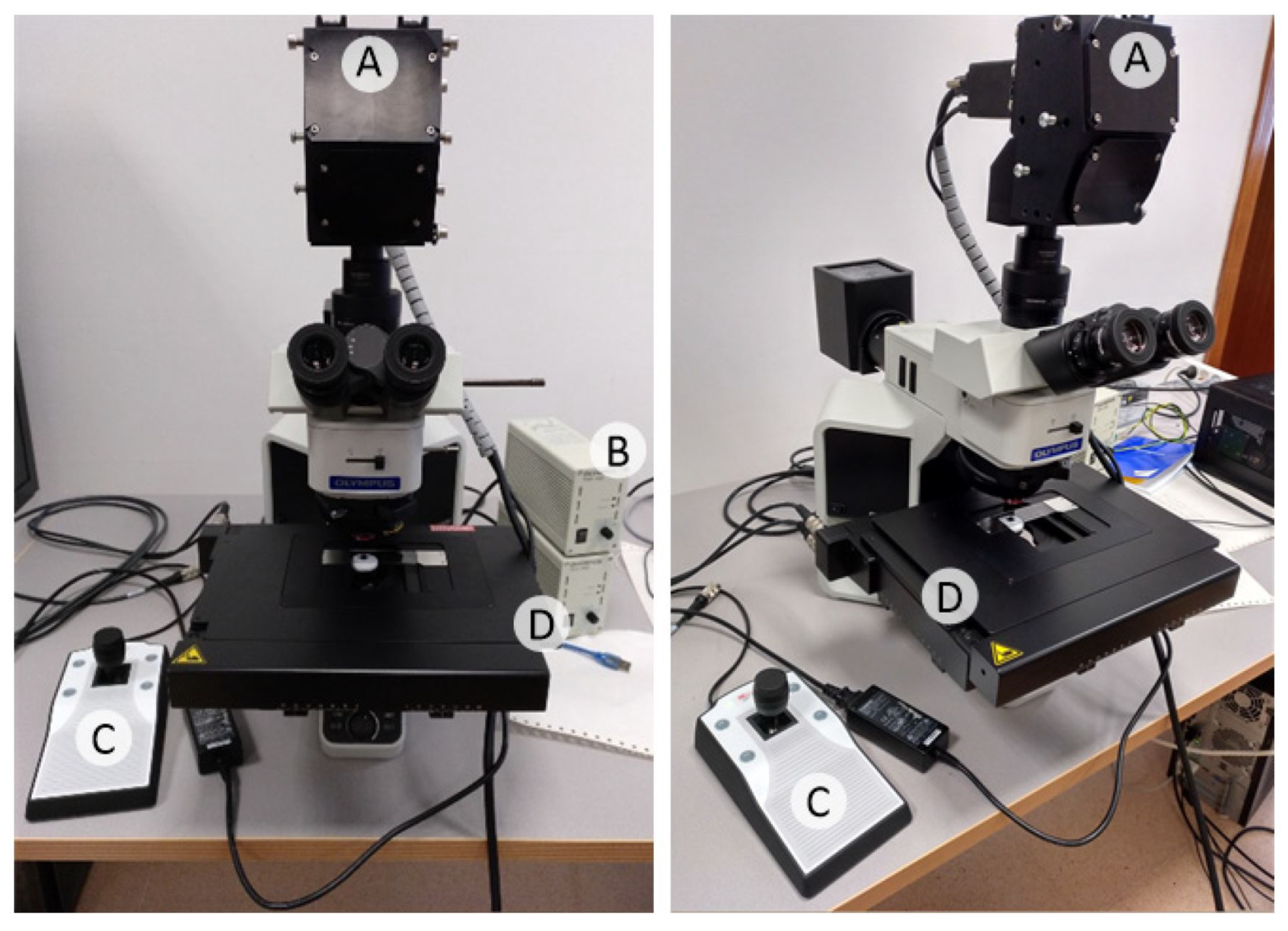
2.1.1. HS Image Instrumentation
- The lenses subsystem in this experiment is a complex Olympus BX-53 microscope (Olympus, Tokyo, Japan) with a tube lens (U-TLU-IR, Olympus, Tokyo, Japan) that permits the attachment of a camera with a selectable light path and LMPLFLN family lenses (Olympus, Tokyo, Japan) with four different magnifications: 5×, 10×, 20× and 50×.
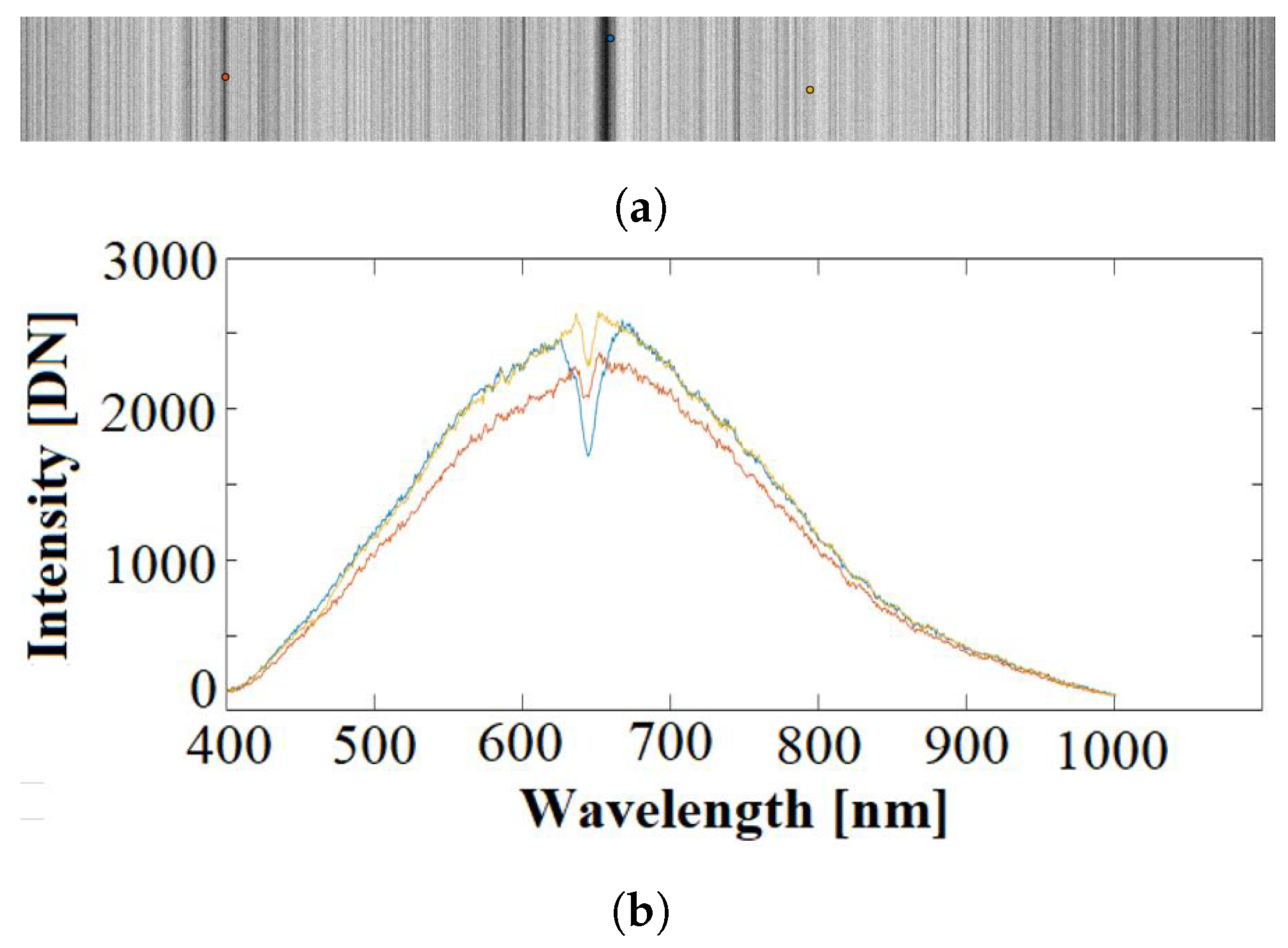
- The image sensor is a push-broom HS camera model Hyperspec® VNIR A-Series from HeadWall Photonics (Fitchburg, MA, USA), which is based on an imaging spectrometer coupled to a Charge-Coupled Device (CCD) sensor, the Adimec-1000m (Adimec, Eindhoven, The Netherlands). This HS system works in the spectral range from 400 to 1000 nm (VNIR) with a spectral resolution of 2.8 nm, being able to sample 826 spectral channels and 1004 spatial pixels.
- The light source is embedded into the microscope and is based on a 12 V–100 W halogen lamp.
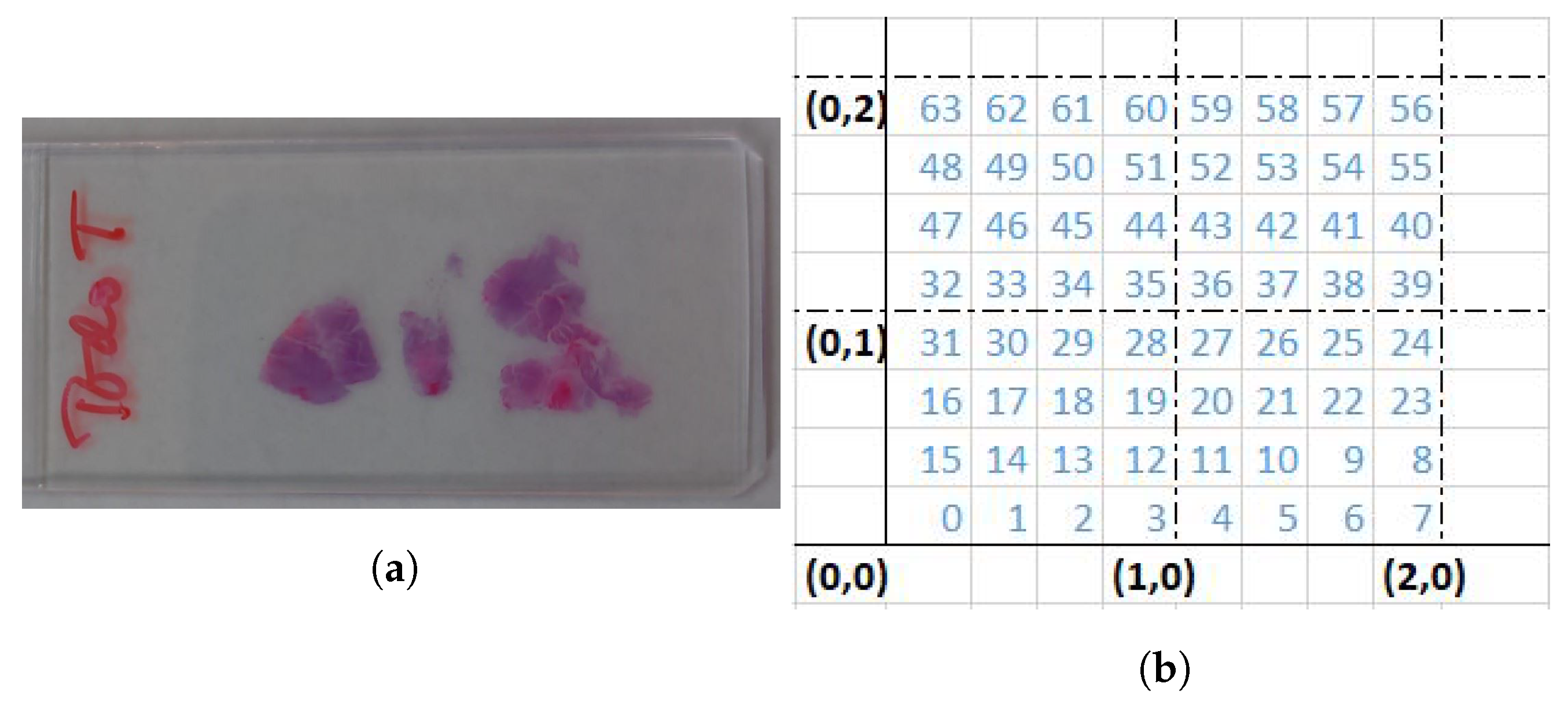
2.1.2. HS Brain Histology Dataset Acquisition
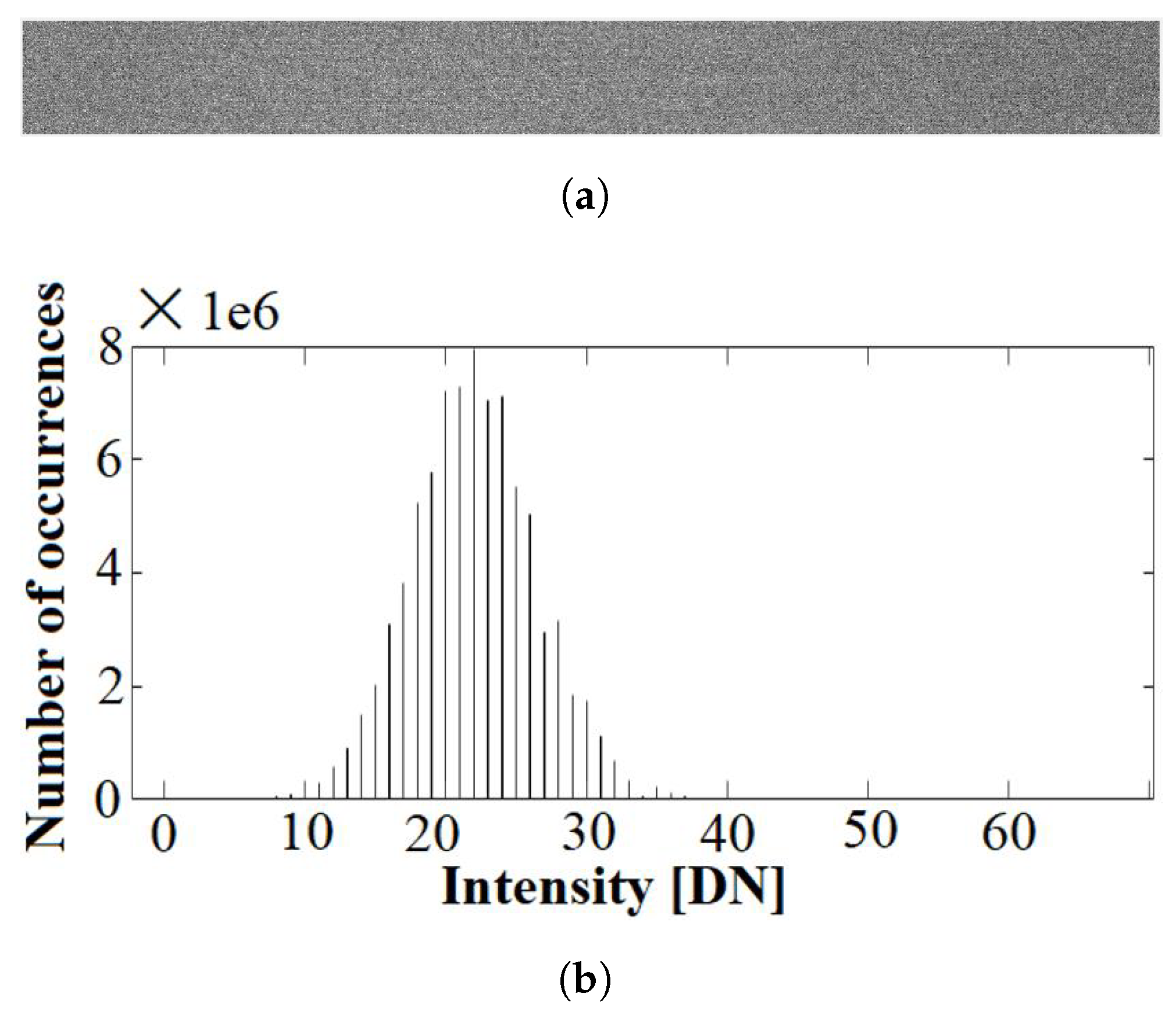
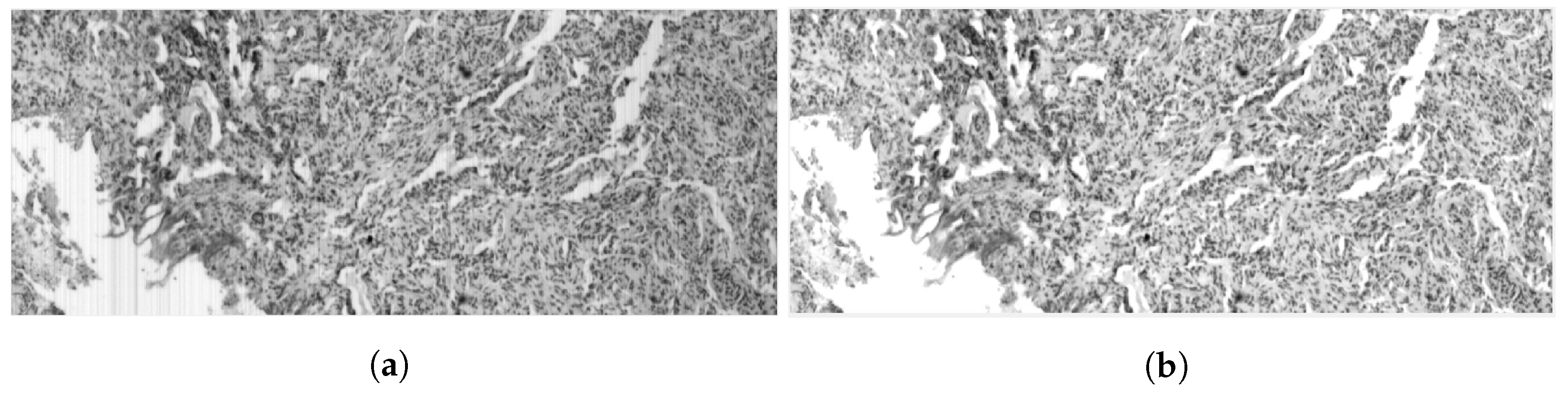
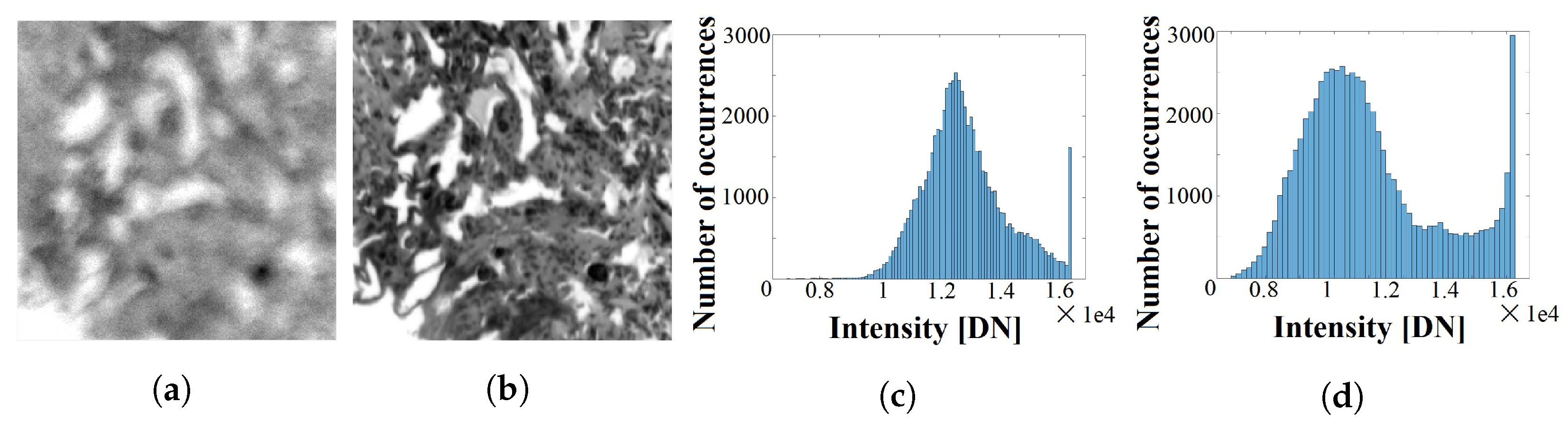
2.1.3. HS Data Pre-Processing
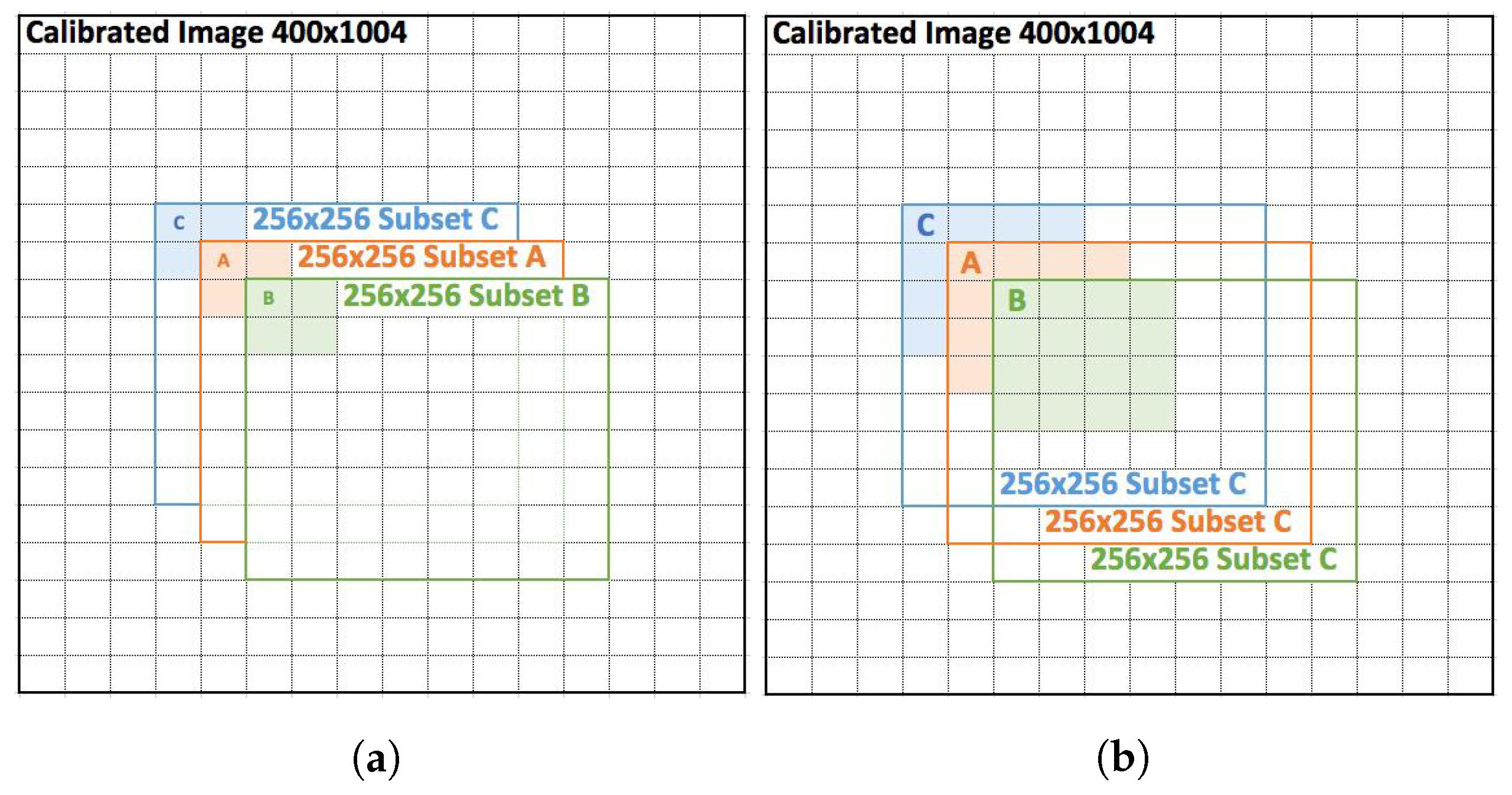
2.1.4. HS Data Sequence Generation
- 1.
- Choose a point A, and starting from it, select a subset of the HS cube of size 256 × 256 in the spatial resolution plane, including all the corresponding spectral bands of the HS cube. Save this new HS cube as the reference image (Very-High Resolution Image—VHRI).
- 2.
- Perform an average pooling 2 × 2 and 4 × 4 of the new HS cube. Save these new HS cubes as frame 0 of the High-Resolution Image (HRI) sequence and LR Image (LRI) sequence respectively.
- 3.
- Choose a point B at 1-pixel distance from A and starting from it, select a subset of the HS cube of size 256 × 256 in the spatial resolution plane.
- 4.
- Perform an average pooling 2 × 2 and 4 × 4 of the new HS cube. Save these new HS cubes as your frame 1 of the HRI sequence and LRI sequence respectively.
- 5.
- Choose another point at 1-pixel distance from A, denoted C, and starting from it, select a subset of the HS cube of size 256 × 256 in the spatial resolution plane.
- 6.
- Perform the same 2 × 2 and 4 × 4 pooling than in #2, and save it as frame 2 in the corresponding sequences.
- 7.
- Perform the same pooling for each subset at 1-pixel and 2-pixels distance from A, including the results in the corresponding sequences.
2.2. Motion Estimation: Fusion Planning
2.3. Image Reconstruction: Restoration
2.4. Evaluation Metrics
- Structural Similarity Index ([45]) is a full-reference metric which measures the image degradation as perceived change in structural information. Higher values mean better image quality, and it is calculated as follows:where is the average of x, is the average of y, is the variance of x, is the variance of y, is the covariance between x and y, and are two constants to stabilise the division with weak denominator, , and L is the dynamic range of the pixel values.
- Peak Signal-to-Noise Ratio (PSNR) is an absolute error metric that measures the relationship between the maximum possible power of a signal and the power of corrupting noise that affects the fidelity of its representation. Higher values mean better image quality, and it is calculated as follows:where R is the maximum fluctuation in the input image data type, and MSE the Minimum Square Error.
- Spectral Angle Mapper (SAM, [46]) is a full-reference metric which measures the spectral degradation of a pixel with respect to a reference spectral signature, in the form of an angle between their two vector representations. Values closer to zero mean better image quality, and it is calculated as follows:where and are the individual pixel spectral vectors of the reference and super-resolved HSI respectively, and is the average SAM of all pixels in the HS cube.
- The higher the score, the better the algorithm.
- Metrics that have infinity as ideal value are in direct proportion with both scores.
- Metrics that have zero as ideal value are in inverse proportion with both scores.
2.5. Processing Platform
3. Results
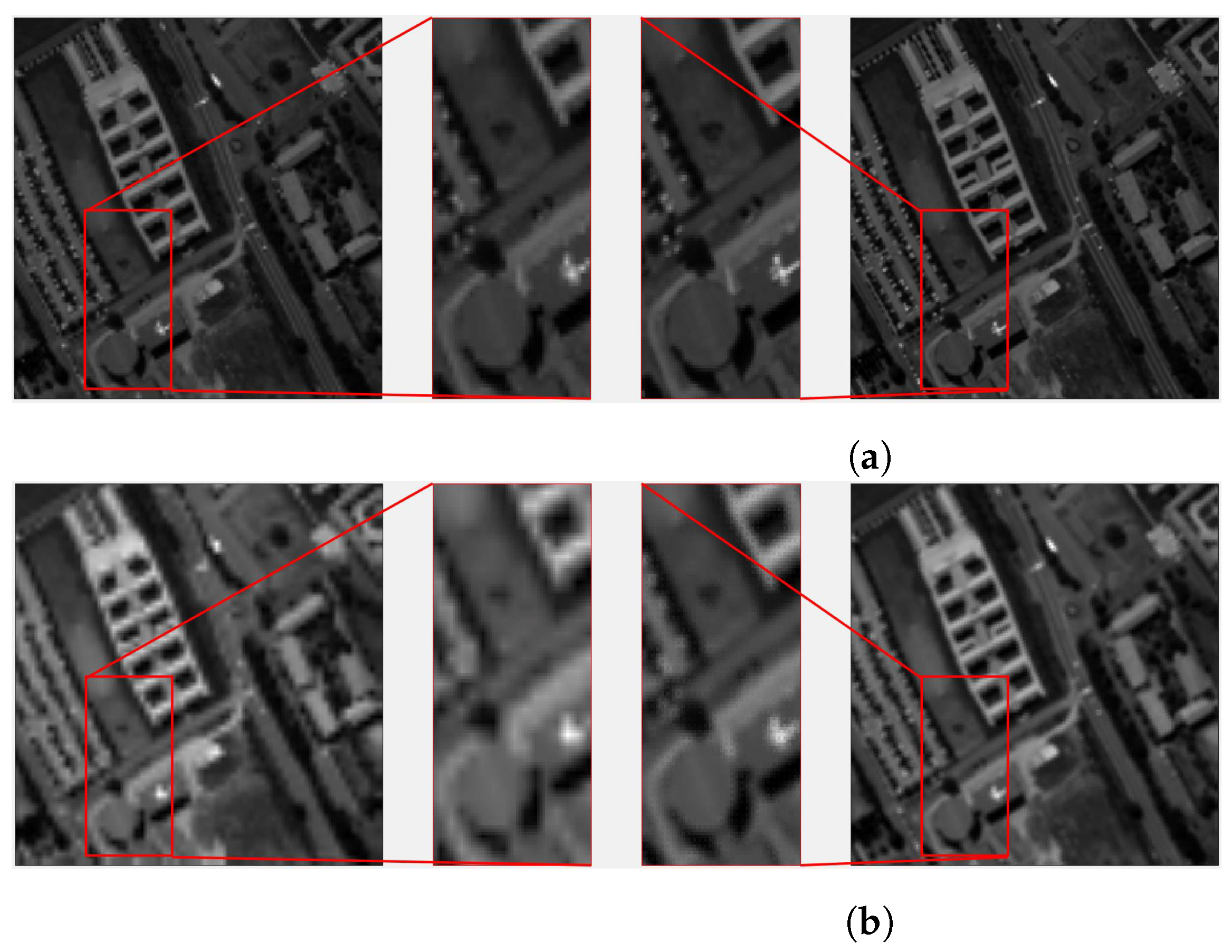
3.1. Sequence 1—Pavia University
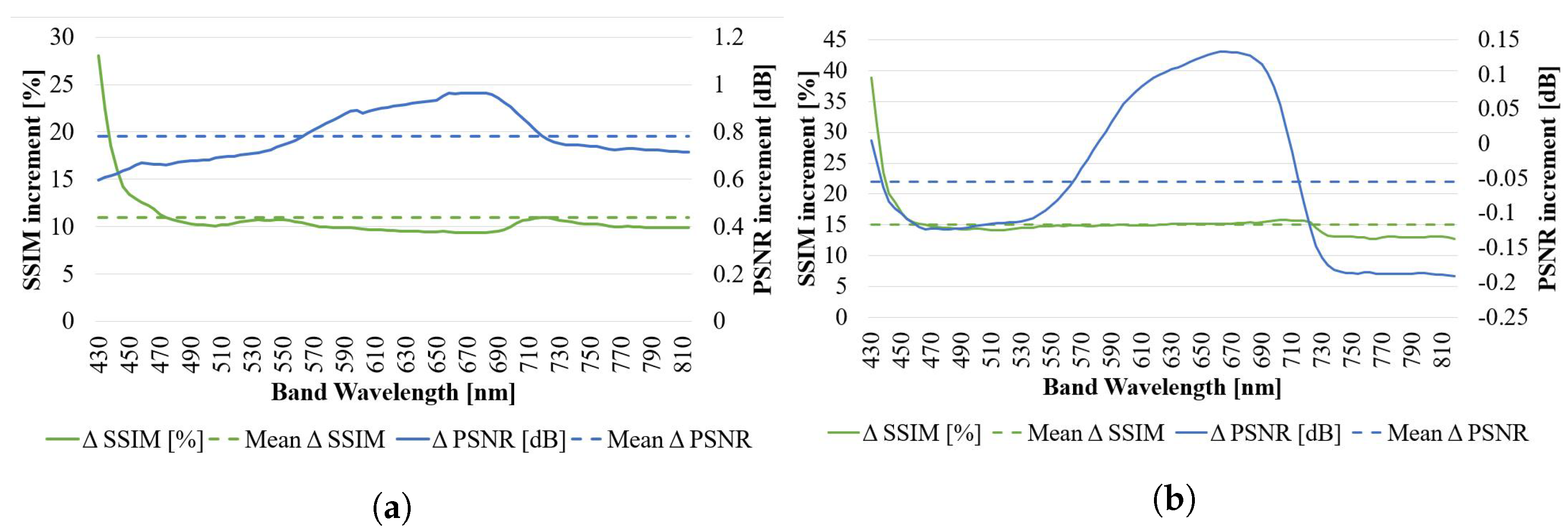
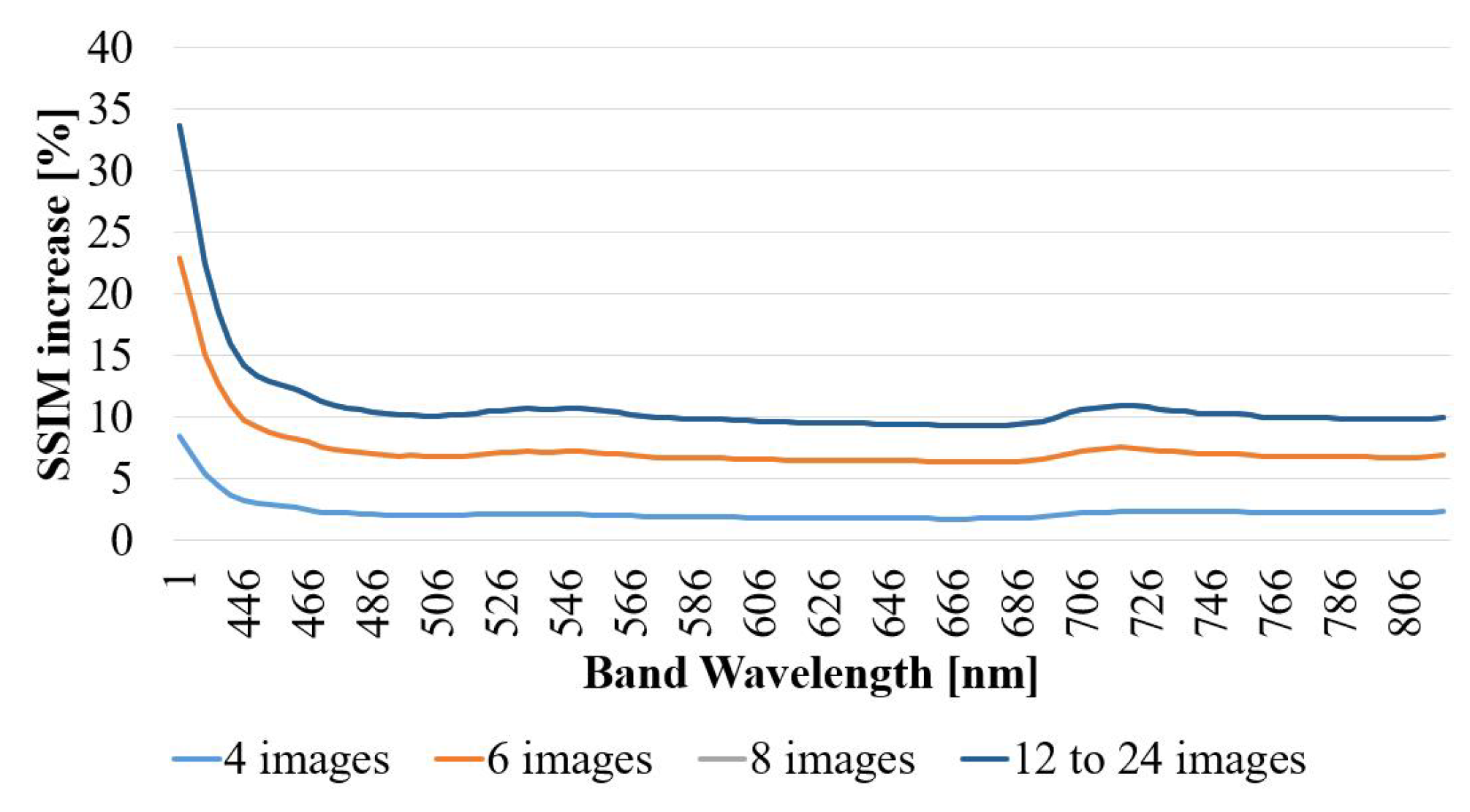
3.1.1. Proposed SR Algorithm vs. Interpolation
3.1.2. Proposed SR Algorithm vs. State-of-the-Art Algorithms
- Reading in detail the Pavia University subset used in [31], it can be appreciated that the volume of the HS cubes handled is 1.28 smaller than our own. Hence, it was considered appropriate to use 1.28 as correction factor for the processing time presented there, and will be denoted as .
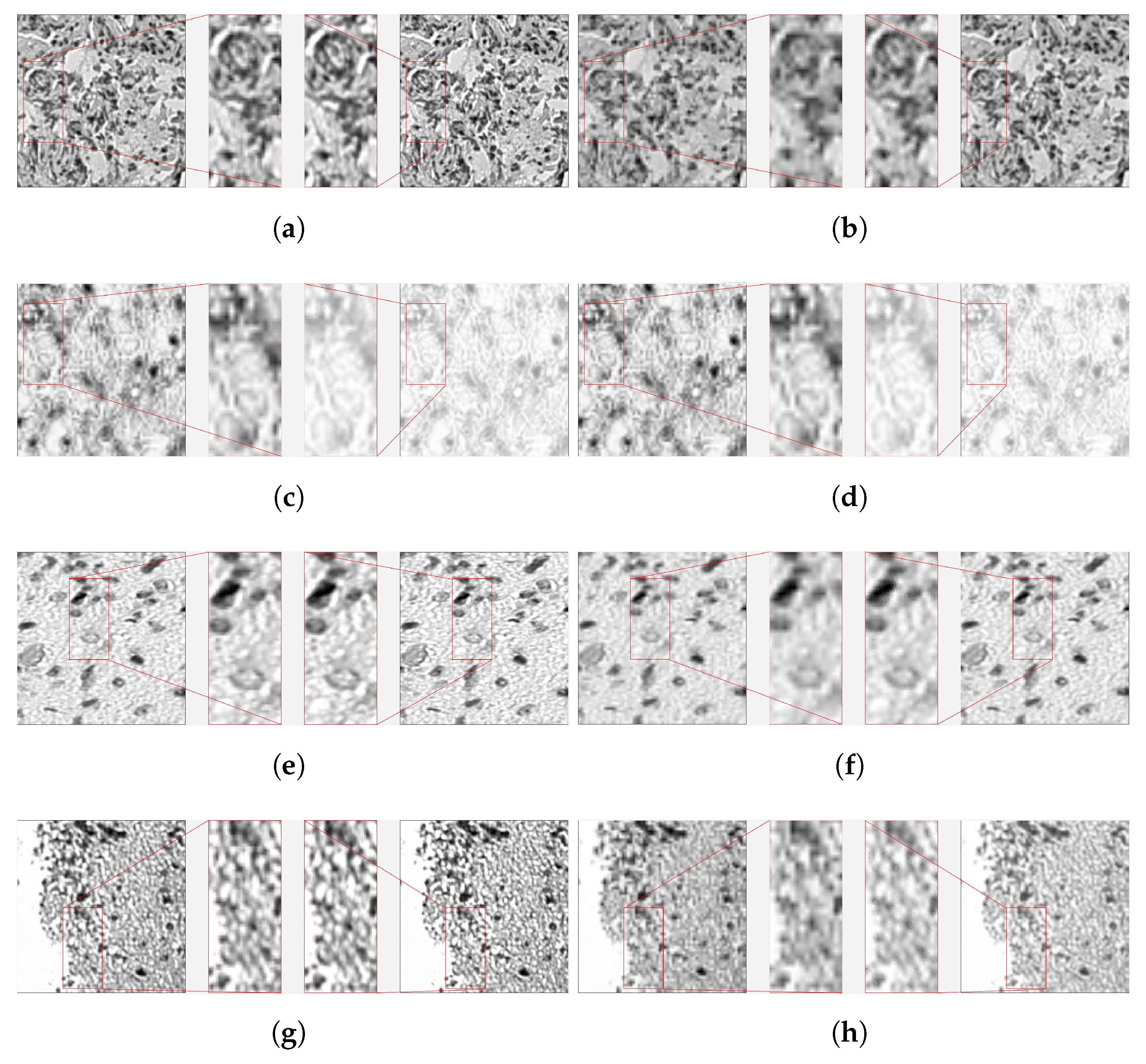
3.2. Sequence 2—High-Density Brain Tissue
3.3. Sequence 3—High Background Content Brain Tissue
3.4. Sequence 4—Brain Tissue with Small Objects
3.5. Sequence 5—Highly-Granular Brain Tissue
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Miravet, C.; Rodríguez, F.B. A two-step neural-network based algorithm for fast image super-resolution. Image Vis. Comput. 2007, 25, 1449–1473. [Google Scholar] [CrossRef]
- Huo, W.; Zhang, Q.; Zhang, Y.; Zhang, Y.; Huang, Y.; Yang, J. A superfast super-resolution method for radar forward-looking imaging. Sensors 2021, 21, 817. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Wang, W.; Luo, H.; Ying, S. Super-resolution reconstruction of high-resolution satellite zy-3 tlc images. Sensors 2017, 17, 1062. [Google Scholar] [CrossRef] [PubMed]
- Elwarfalli, H.; Hardie, R.C. Fifnet: A convolutional neural network for motion-based multiframe super-resolution using fusion of interpolated frames. Comput. Vis. Image Underst. 2021, 202, 103097. [Google Scholar] [CrossRef]
- Huang, T.; Dong, W.; Wu, J.; Li, L.; Li, X.; Shi, G. Deep hyperspectral image fusion network with iterative spatio-spectral regularization. IEEE Tran. Comput. Imaging 2022, 8, 201–214. [Google Scholar] [CrossRef]
- Shamsolmoali, P.; Zareapoor, M.; Zhang, J.; Yang, J. Image super resolution by dilated dense progressive network. Image Vis. Comput. 2019, 88, 9–18. [Google Scholar] [CrossRef]
- Ghassab, V.K.; Bouguila, N. Plug-and-play video super-resolution using edge-preserving filtering. Comput. Vis. Image Underst. 2022, 216, 103359. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Zhang, J.; Yang, C. Analysis of the features and reconstruction of a high resolution infrared image based on a multi-aperture imaging system. Optik 2014, 125, 5888–5892. [Google Scholar] [CrossRef]
- Makwana, R.R.; Mehta, N.D. Survey on single image super resolution techniques. IOSR J. Electron. Commun. Eng. 2013, 5, 23–33. [Google Scholar] [CrossRef]
- Quevedo Gutiérrez, E.; Sánchez, L.; Marrero Callico, G.; Tobajas, F.; Cruz, J.; Sosa, V.; Sarmiento, R. Super-resolution with selective filter based on adaptive window and variable macro-block size. J. Real-Time Image Process. 2018, 15, 389–406. [Google Scholar] [CrossRef]
- Romano, Y.; Isidoro, J.R.; Milanfar, P. Raisr: Rapid and accurate image super resolution. IEEE Trans. Comput. Imaging 2017, 3, 110–125. [Google Scholar] [CrossRef]
- Kamruzzaman, M.; Sun, D.-W. Chapter 5—introduction to hyperspectral imaging technology. In Computer Vision Technology for Food Quality Evaluation, 2nd ed.; Sun, D.-W., Ed.; Academic Press: San Diego, CA, USA, 2016; pp. 111–139. [Google Scholar]
- Yi, C.; Zhao, Y.-Q.; Chan, J.C.-W.; Kong, S.G. Joint spatial-spectral resolution enhancement of multispectral images with spectral matrix factorization and spatial sparsity constraints. Remote Sens. 2020, 12, 993. [Google Scholar] [CrossRef]
- Lu, Y.; Saeys, W.; Kim, M.; Peng, Y.; Lu, R. Hyperspectral imaging technology for quality and safety evaluation of horticultural products: A review and celebration of the past 20-year progress. Postharvest Biol. Technol. 2020, 170, 111318. [Google Scholar] [CrossRef]
- Benelli, A.; Cevoli, C.; Fabbri, A. In-field hyperspectral imaging: An overview on the ground-based applications in agriculture. J. Agric. Eng. 2020, 51, 129–139. [Google Scholar] [CrossRef]
- Uteng, S.; Quevedo, E.; Callico, G.M.; Castaño, I.; Carretero, G.; Almeida, P.; Garcia, A.; Hernandez, J.A.; Godtliebsen, F. Curve-based classification approach for hyperspectral dermatologic data processing. Sensors 2021, 21, 680. [Google Scholar] [CrossRef]
- Ortega, S.; Halicek, M.; Fabelo, H.; Callico, G.M.; Fei, B. Hyperspectral and multispectral imaging in digital and computational pathology: A systematic review—invited. Biomed. Opt. Express 2020, 11, 3195–3233. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, S.; Feng, Y.; Mei, S.; Jia, S.; Du, Q. Hyperspectral imagery spatial super-resolution using generative adversarial network. IEEE Trans. Comput. Imaging 2021, 7, 948–960. [Google Scholar] [CrossRef]
- Abi-Rizk, R.; Orieux, F.; Abergel, A. Super-resolution hyperspectral reconstruction with majorization-minimization algorithm and low-rank approximation. IEEE Trans. Comput. Imaging 2022, 8, 260–272. [Google Scholar] [CrossRef]
- Rust, M.J.; Bates, M.; Zhuang, X. Sub-diffraction-limit imaging by stochastic optical reconstruction microscopy (storm). Nat. Methods 2006, 3, 793–796. [Google Scholar] [CrossRef]
- Park, S.; Park, M.; Kang, M. Super-resolution image reconstruction: A technical overview. IEEE Acoust. Speech Signal Process. Newsl. 2003, 20, 21–36. [Google Scholar] [CrossRef] [Green Version]
- Tsai, R. Multiframe image restoration and registration. Adv. Comput. Vis. Image Process. 1984, 1, 317–339. [Google Scholar]
- Bose, N.; Kim, H.; Valenzuela, H.M. Recursive implementation of total least squares algorithm for image reconstruction from noisy, undersampled multiframes. In Proceedings of the 1993 IEEE International Conference on Acoustics, Speech, and Signal Processing, Minneapolis, MN, USA, 27–30 April 1993; Volume 5, pp. 269–272. [Google Scholar]
- Irani, M.; Peleg, S. Motion analysis for image enhancement: Resolution, occlusion, and transparency. J. Visual Commun. Image Represent. 1993, 4, 324–335. [Google Scholar] [CrossRef]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Learning a deep convolutional network for image super-resolution. In European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Cham, Switzerland, 2014; pp. 184–199. [Google Scholar]
- Ledig, C.; Theis, L.; Huszár, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-realistic single image super-resolution using a generative adversarial network. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4681–4690. [Google Scholar]
- Kawulok, M.; Benecki, P.; Piechaczek, S.; Hrynczenko, K.; Kostrzewa, D.; Nalepa, J. Deep learning for multiple-image super-resolution. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1062–1066. [Google Scholar] [CrossRef]
- Farsiu, S.; Robinson, M.D.; Elad, M.; Milanfar, P. Fast and robust multiframe super resolution. IEEE Trans. Image Process. 2004, 13, 1327–1344. [Google Scholar] [CrossRef] [PubMed]
- Akgun, T.; Altunbasak, Y.; Mersereau, R.M. Super-resolution reconstruction of hyperspectral images. IEEE Trans. Image Process. 2005, 14, 1860–1875. [Google Scholar] [CrossRef] [PubMed]
- Dian, R.; Li, S.; Fang, L.; Bioucas-Dias, J.M. Hyperspectral image super-resolution via local low-rank and sparse representations. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4003–4006. [Google Scholar]
- Kanatsoulis, C.I.; Fu, X.; Sidiropoulos, N.D.; Ma, W.-K. Hyperspectral super-resolution: A coupled tensor factorization approach. IEEE Trans. Signal Process. 2018, 66, 6503–6517. [Google Scholar] [CrossRef]
- Li, Y.; Hu, J.; Zhao, X.; Xie, W.; Li, J. Hyperspectral image super-resolution using deep convolutional neural network. Neurocomputing 2017, 266, 29–41. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes 2nd Edition: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Lu, G.; Fei, B. Medical hyperspectral imaging: A review. J. Biomed. Opt. 2014, 19, 1–24. [Google Scholar] [CrossRef]
- Ortega, S.; Halicek, M.; Fabelo, H.; Camacho, R.; Plaza, M.d.l.L.; Godtliebsen, F.; Callicó, G.M.; Fei, B. Hyperspectral imaging for the detection of glioblastoma tumor cells in h&e slides using convolutional neural networks. Sensors 2020, 20, 1911. [Google Scholar]
- Ortega, S.; Guerra, R.; Díaz, M.; Fabelo, H.; López, S.; Callicó, G.M.; Sarmiento, R. Hyperspectral push-broom microscope development and characterization. IEEE Access 2019, 7, 122473–122491. [Google Scholar] [CrossRef]
- Dell’Acqua, F.; Gamba, P.; Ferrari, A.; Palmason, J.; Benediktsson, J.; Arnason, K. Exploiting spectral and spatial information in hyperspectral urban data with high resolution. IEEE Geosci. Remote Sens. Lett. 2004, 1, 322–326. [Google Scholar] [CrossRef]
- Lopez, S.; Callico, G.; Lopez, J.; Sarmiento, R. A high quality/low computational cost technique for block matching motion estimation [video coding applications]. In Proceedings of the Design, Automation and Test in Europe, Munich, Germany, 7–11 March 2005; Volume 3, pp. 2–7. [Google Scholar]
- Wang, Y.; Ostermann, J.; Zhang, Y. Digital Video Processing and Communications - Chapter 6; Prentice-Hall Signal Processing Series; Prentice Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Callico, G.M.; Lopez, S.; Sosa, O.; Lopez, J.F.; Sarmiento, R. Analysis of fast block matching motion estimation algorithms for video super-resolution systems. IEEE Trans. Consumer Electron. 2008, 54, 1430–1438. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Components Analysis—Chapter 6. Springer: New York, NY, USA, 2002. [Google Scholar]
- Quevedo, E.; de la Cruz, J.; Sanchez, L.; Callico, G.M.; Tobajas, F. Super-resolution with adaptive macro-block topology applied to a multi-camera system. IEEE Trans. Consum. Electron. 2015, 61, 230–235. [Google Scholar] [CrossRef]
- Callico, G.; Nunez, A.; Llopis, R.; Sethuraman, R.; de Beeck, M. A low-cost implementation of super-resolution based on a video encoder. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society, IECON 02, Sevilla, Spain, 5–8 November 2002; Volume 2, pp. 1439–1444. [Google Scholar]
- López, S.; Callicó, G.; López, J.; Sarmiento, R.; Núñez, A. Low-cost implementation of a super-resolution algorithm for real-time video applications. In Proceedings of the 2005 IEEE International Symposium on Circuits and Systems, Kobe, Japan, 23–26 May 2005; Volume 6, pp. 6130–6133. [Google Scholar]
- Wang, Z.; Bovik, A.; Sheikh, H.; Simoncelli, E. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Yuhas, R.H.; Goetz, A.F.H.; Boardman, J.W. Discrimination among semi-arid landscape endmembers using the spectral angle mapper (sam) algorithm. In Proceedings of the NASA AVIRIS Workshop 92, JPL, Pasadena, CA, USA, 1–5 June 1992; pp. 147–149. [Google Scholar]
- UserBenchmark. Processor Performance Comparison. Available online: https://cpu.userbenchmark.com/ (accessed on 25 October 2021).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EF | N | SAM [deg] | ↑ SAM [%] | Execution Time [s] | |
|---|---|---|---|---|---|
| 2 | 8 | Interpolated | 4.272 | 11.68 | |
| Proposed | 3.822 | ||||
| 4 | 24 | Interpolated | 7.026 | 4.36 | |
| Proposed | 6.732 |
| Algorithm/Metrics | SAM () | PSNR (dB) | Score 1 | Runtime (s) | Score 2 |
|---|---|---|---|---|---|
| Ideal value | 0 | ∞ | ∞ | 0 | ∞ |
| STEREO [31] | 4.55 | 22.50 | 4.86 | 26.4 | 0.0920 |
| FUSE [31] | 5.54 | 21.09 | 3.81 | 0.5 | 3.7437 |
| HySure [31] | 4.81 | 21.18 | 4.40 | 82.5 | 0.0262 |
| LRSR HSI-PAN [30] | 4.56 | 33.69 | 7.39 | - | - |
| LRSR HSI-MSI [30] | 1.81 | 43.89 | 24.24 | - | - |
| Proposed | 3.82 | 36.84 | 9.69 | 1.67 | 5.8052 |
| SAM vs. | ↑SAM | Execution Time | |||
|---|---|---|---|---|---|
| Reference [deg] | [%] | per Band [ms/band] | |||
| Sequence 2 | EF = 2 | Interpolated | 2.398 | 9.01 | |
| N = 25 | Proposed | 2.200 | |||
| EF = 4 | Interpolated | 4.641 | 0.00 | ||
| N = 25 | Proposed | 4.641 | |||
| Sequence 3 | EF = 2 | Interpolated | 3.209 | 7.91 | |
| N = 25 | Proposed | 2.974 | |||
| EF = 4 | Interpolated | 4.700 | 10.00 | ||
| N = 25 | Proposed | 4.272 | |||
| Sequence 4 | EF = 2 | Interpolated | 3.601 | 7.26 | |
| N = 25 | Proposed | 3.358 | |||
| EF = 4 | Interpolated | 4.178 | 1.28 | ||
| N = 25 | Proposed | 4.125 | |||
| Sequence 5 | EF = 2 | Interpolated | 2.278 | 9.84 | |
| N = 25 | Proposed | 2.074 | |||
| EF = 4 | Interpolated | 8.021 | 0.00 | ||
| N = 25 | Proposed | 8.021 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbina Ortega, C.; Quevedo Gutiérrez, E.; Quintana, L.; Ortega, S.; Fabelo, H.; Santos Falcón, L.; Marrero Callico, G. Towards Real-Time Hyperspectral Multi-Image Super-Resolution Reconstruction Applied to Histological Samples. Sensors 2023, 23, 1863. https://doi.org/10.3390/s23041863
Urbina Ortega C, Quevedo Gutiérrez E, Quintana L, Ortega S, Fabelo H, Santos Falcón L, Marrero Callico G. Towards Real-Time Hyperspectral Multi-Image Super-Resolution Reconstruction Applied to Histological Samples. Sensors. 2023; 23(4):1863. https://doi.org/10.3390/s23041863
Chicago/Turabian StyleUrbina Ortega, Carlos, Eduardo Quevedo Gutiérrez, Laura Quintana, Samuel Ortega, Himar Fabelo, Lucana Santos Falcón, and Gustavo Marrero Callico. 2023. "Towards Real-Time Hyperspectral Multi-Image Super-Resolution Reconstruction Applied to Histological Samples" Sensors 23, no. 4: 1863. https://doi.org/10.3390/s23041863
APA StyleUrbina Ortega, C., Quevedo Gutiérrez, E., Quintana, L., Ortega, S., Fabelo, H., Santos Falcón, L., & Marrero Callico, G. (2023). Towards Real-Time Hyperspectral Multi-Image Super-Resolution Reconstruction Applied to Histological Samples. Sensors, 23(4), 1863. https://doi.org/10.3390/s23041863