
Development of a Frugal, In Situ Sensor Implementing a Ratiometric Method for Continuous Monitoring of Turbidity in Natural Waters


Abstract
:1. Introduction
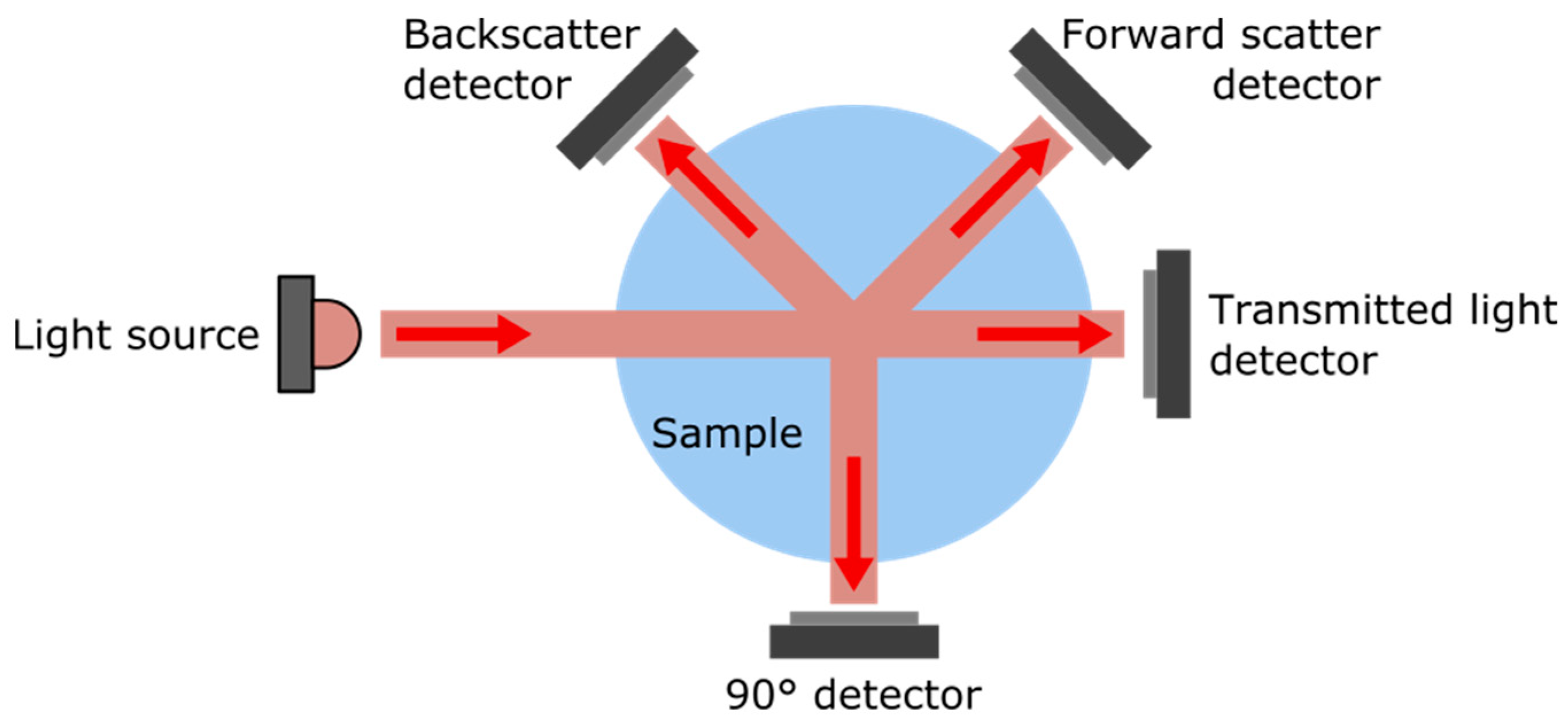
1.1. Turbidity Measurement Methods
1.2. Turbidity Sensors Calibration
1.3. Commercial and Research-Level Instruments
2. Materials and Methods
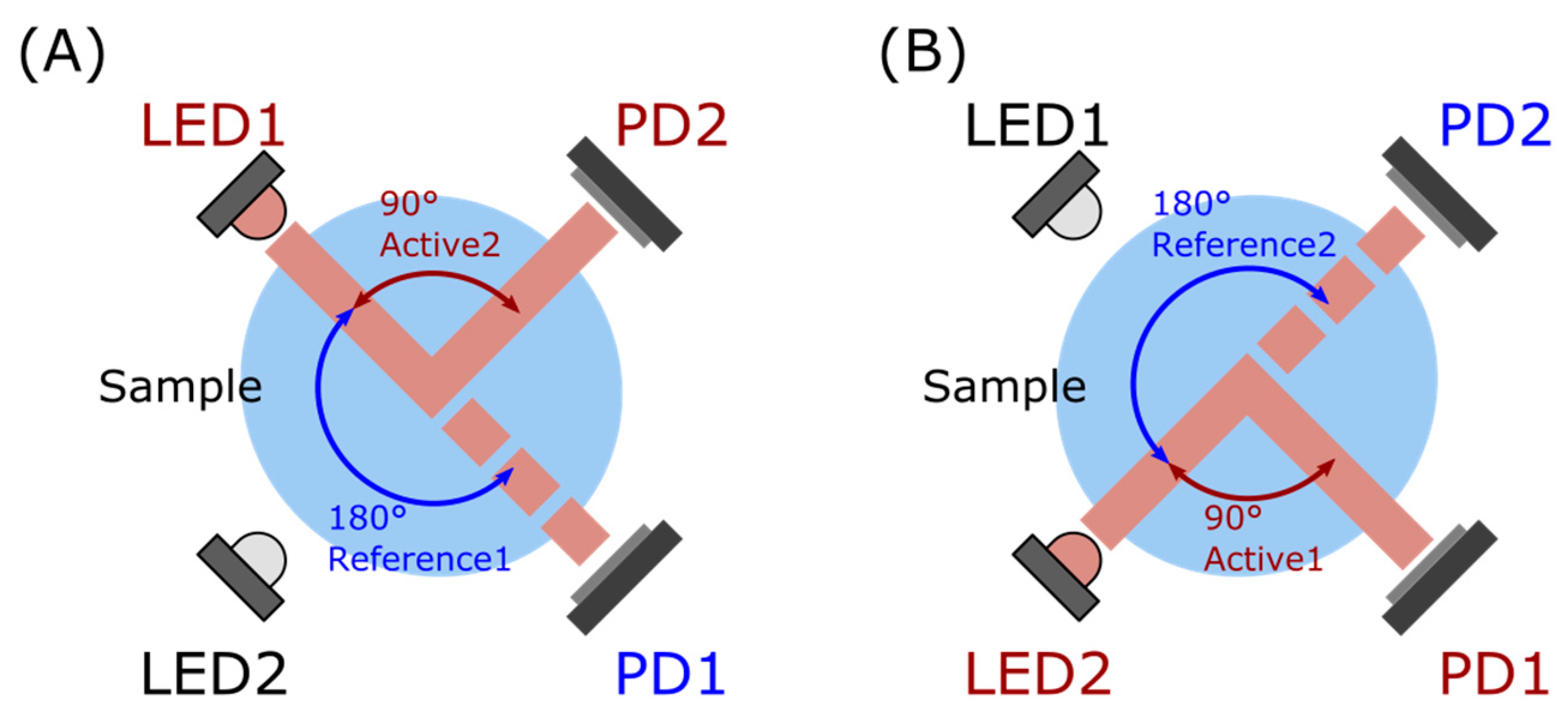
2.1. Overview of the Turbidity Sensor
2.2. Hardware Design
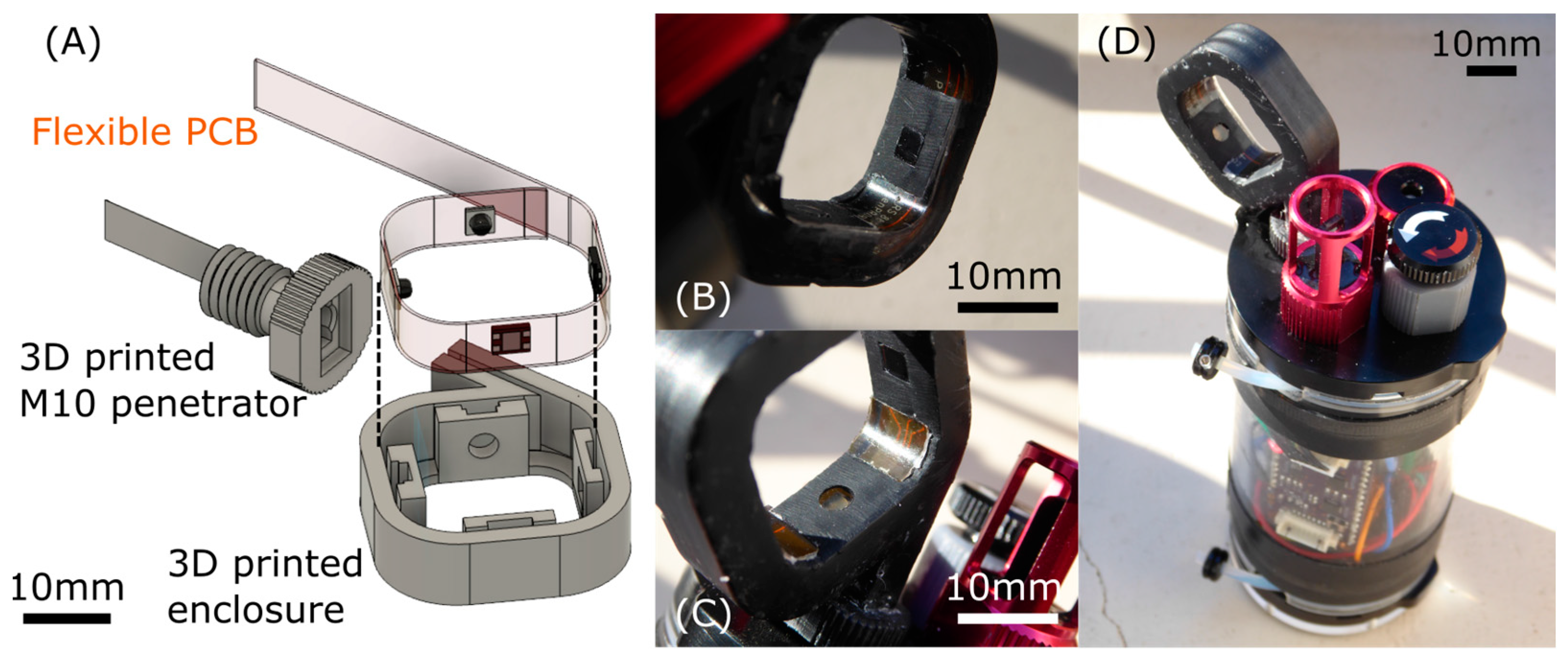
2.3. Sensor Housing
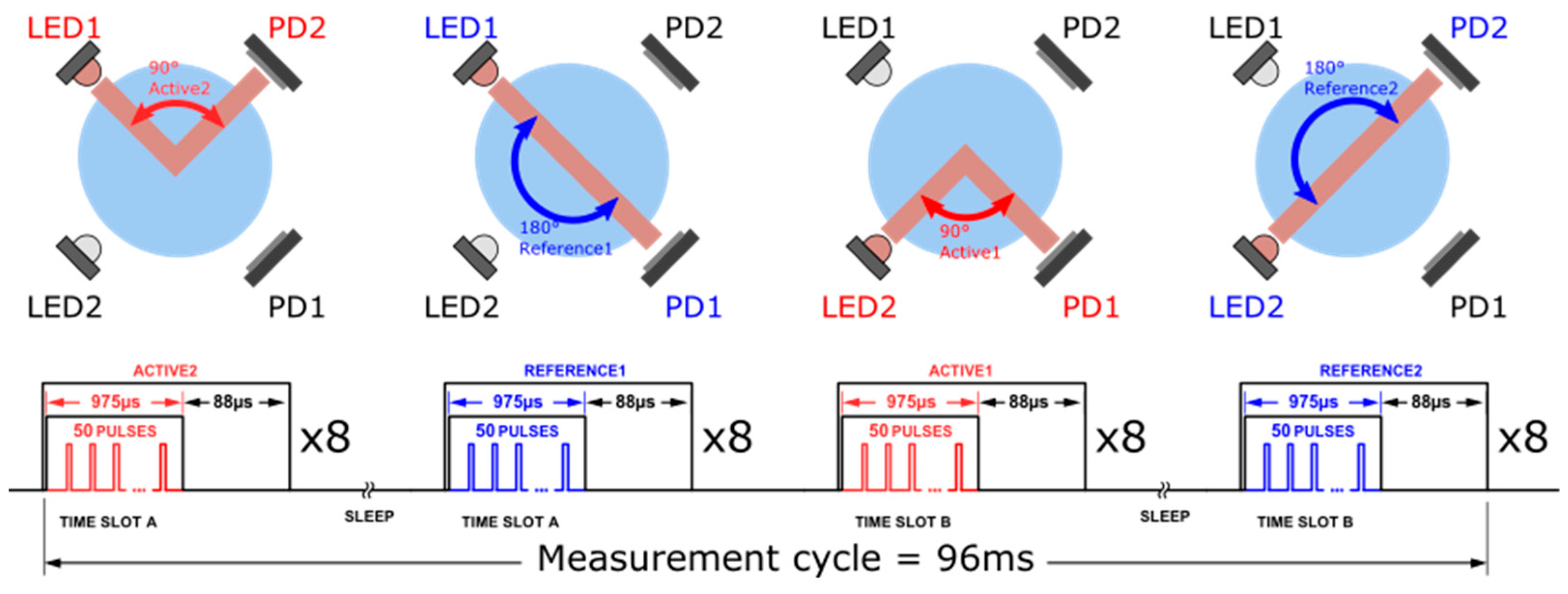
2.4. Software
2.5. Formazin Standard Calibration Method
3. Results
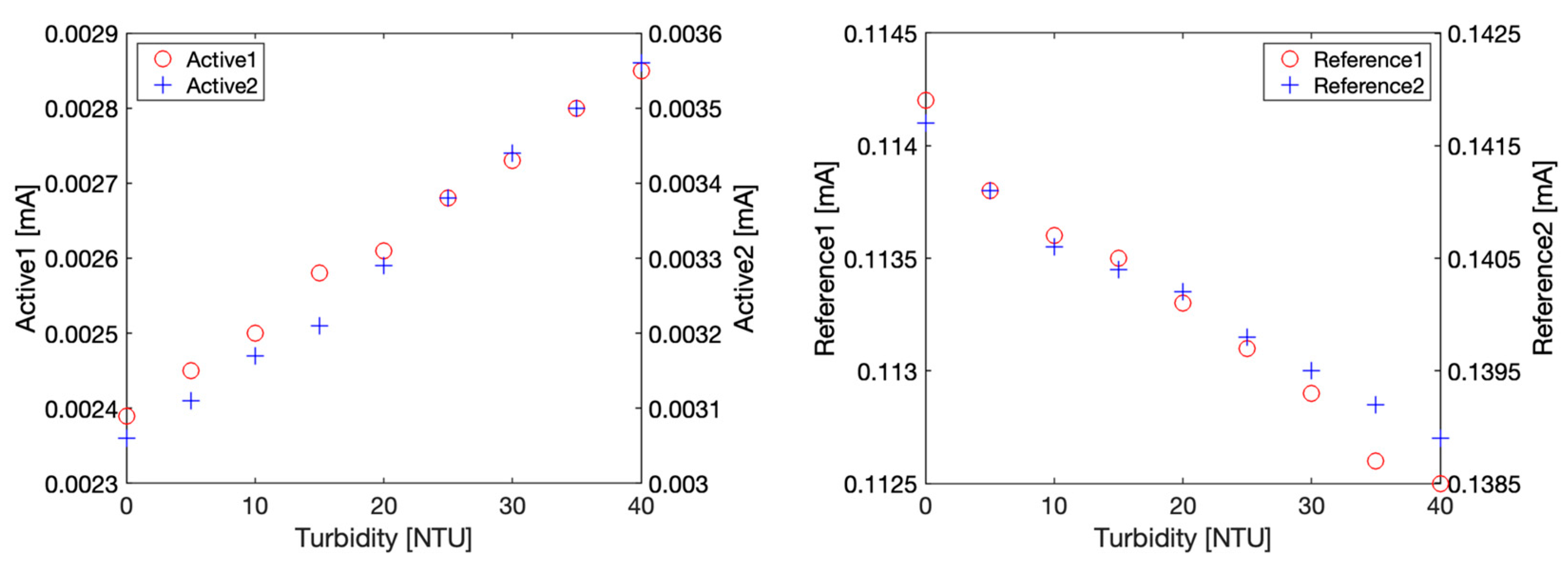
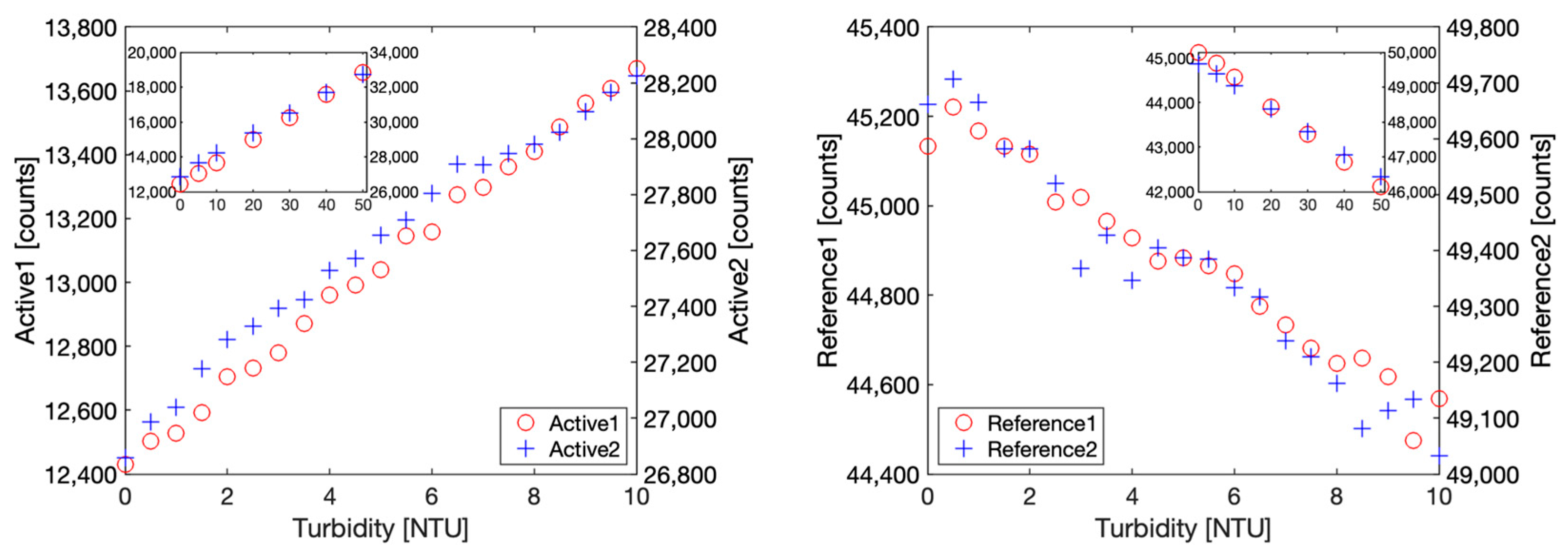
3.1. Photodetector Current
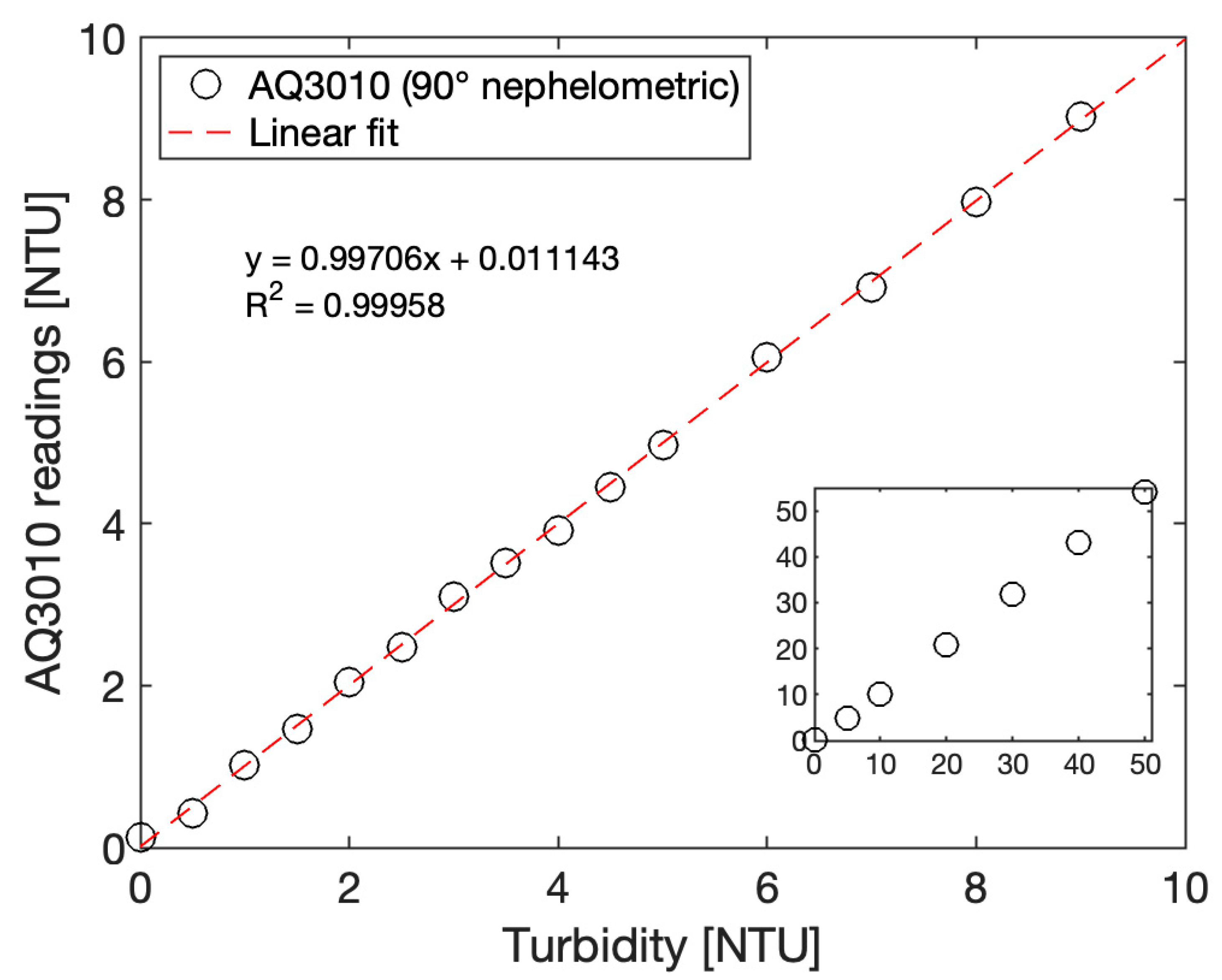
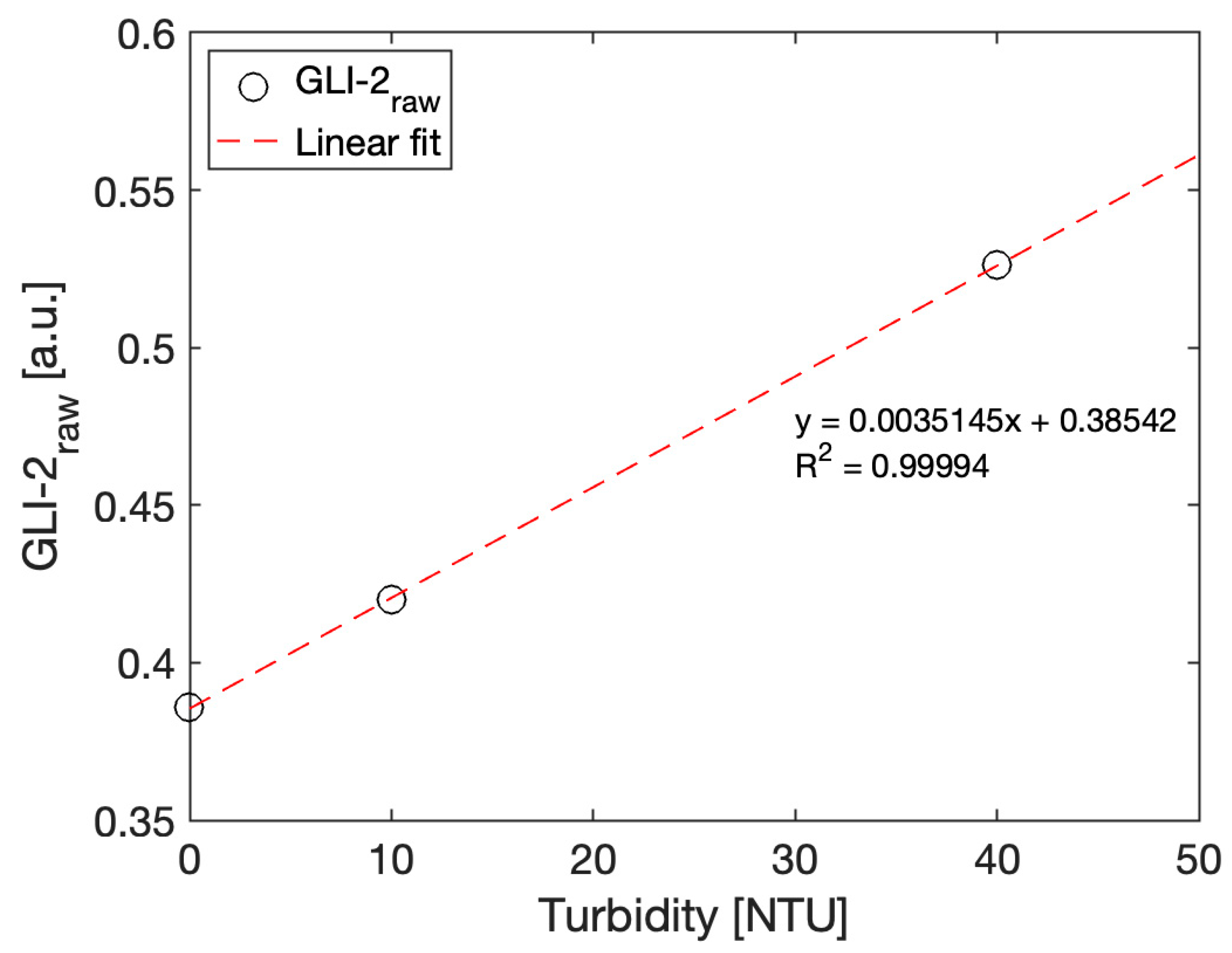
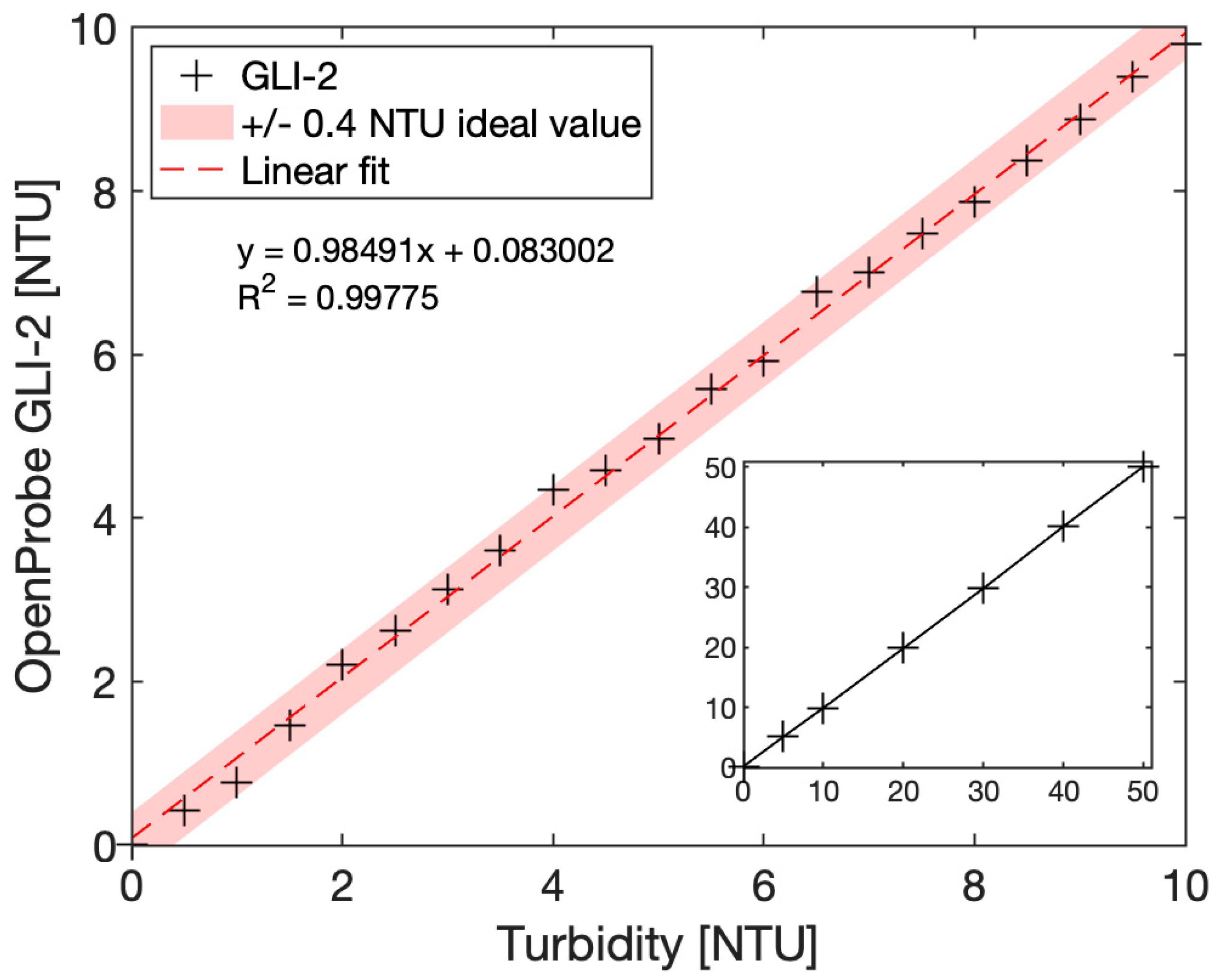
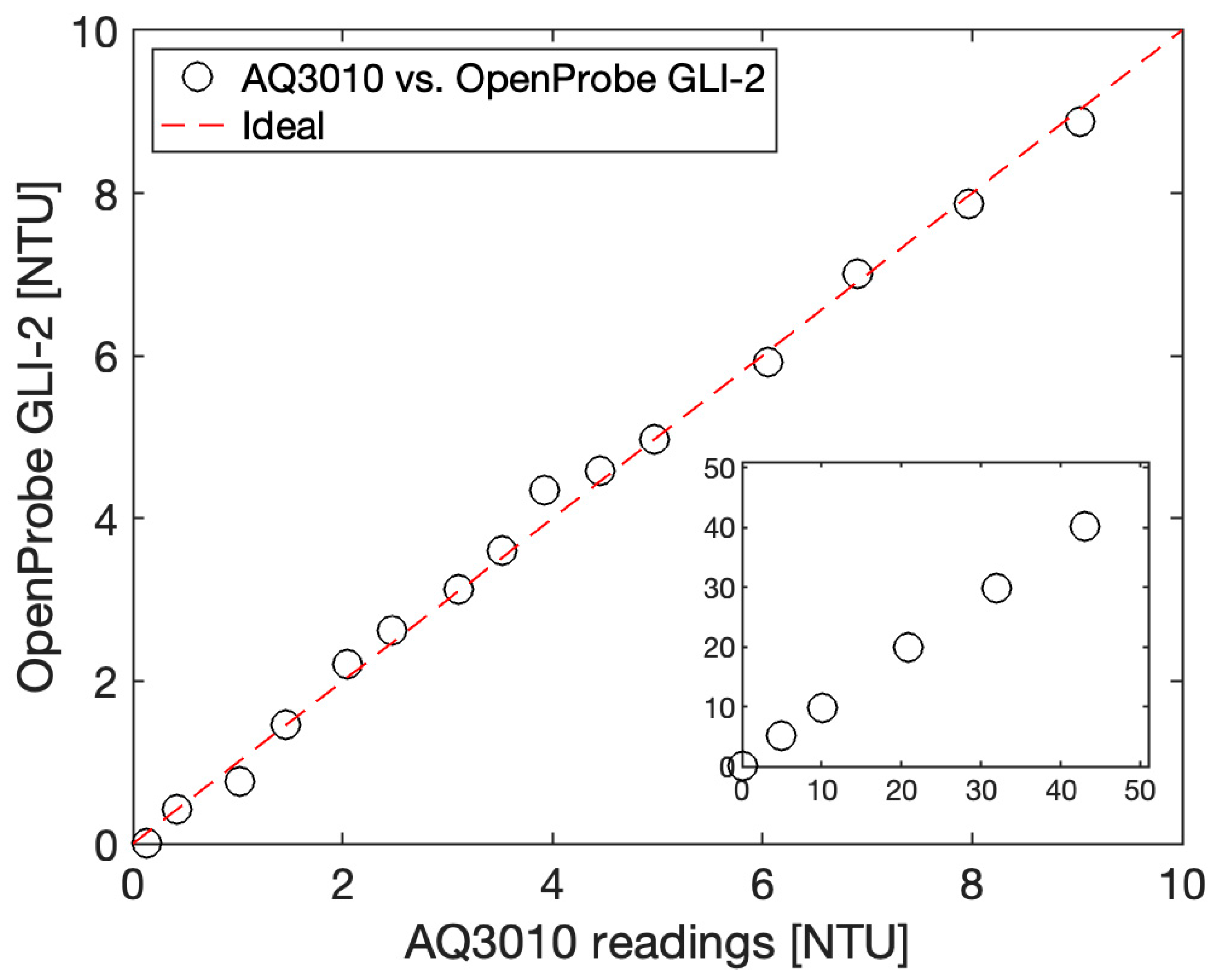
3.2. Sensor Calibration
4. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lambrou, T.P.; Panayiotou, C.G.; Anastasiou, C.C. A low-cost system for real time monitoring and assessment of potable water quality at consumer sites. In Proceedings of the IEEE Sensors, Taipei, Taiwan, 28–31 October 2012. [Google Scholar]
- Matos, T.; Faria, C.L.; Martins, M.S.; Henriques, R.; Gomes, P.A.; Goncalves, L.M. Development of a cost-effective optical sensor for continuous monitoring of turbidity and suspended particulate matter in marine environment. Sensors 2019, 19, 4439. [Google Scholar] [CrossRef]
- Trevathan, J.; Read, W.; Schmidtke, S. Towards the development of an affordable and practical light attenuation turbidity sensor for remote near real-time aquatic monitoring. Sensors 2020, 20, 1993. [Google Scholar] [CrossRef]
- Trevathan, J.; Read, W.; Sattar, A. Implementation and calibration of an iot light attenuation turbidity sensor. Internet Things 2022, 19, 100576. [Google Scholar] [CrossRef]
- Sadar, M. Turbidity Measurement: A Simple, Effective Indicator of Water Quality Change; OTT Hydrome: Sterling, VA, USA, 2011. [Google Scholar]
- Guo, X.; Stoesser, T.; Zheng, D.; Luo, Q.; Liu, X.; Nian, T. A methodology to predict the run-out distance of submarine landslides. Comput. Geotech. 2023, 153, 105073. [Google Scholar] [CrossRef]
- Jaijel, R.; Biton, E.; Weinstein, Y.; Ozer, T.; Katz, T. Observations of turbidity currents in a small, slope-confined submarine canyon in the Eastern Mediterranean Sea. Earth Planet Sci. Lett. 2023, 604, 118008. [Google Scholar] [CrossRef]
- Vousdoukas, M.I.; Aleksiadis, S.; Grenz, C.; Verney, R. Comparisons of acoustic and optical sensors for suspended sediment concentration measurements under non-homogeneous solutions. J. Coast. Res. 2011, 160–164. Available online: http://www.jstor.org/stable/26482153 (accessed on 19 December 2022).
- Pallarès, A.; Schmitt, P.; Uhring, W. Comparison of time resolved optical turbidity measurements for water monitoring to standard real-time techniques. Sensors 2021, 21, 3136. [Google Scholar] [CrossRef]
- Omar, A.F.B.; MatJafri, M.Z.B. Turbidimeter design and analysis: A review on optical fiber sensors for the measurement of water turbidity. Sensors 2009, 9, 8311–8335. [Google Scholar] [CrossRef] [PubMed]
- Sadar, M. Turbidimeter Instrument Comparison: Low-Level Sample Measurements—Technical Information Series; Hach Company: Loveland, CO, USA, 1999. [Google Scholar]
- Fondriest Environmental Measuring Turbidity, TSS, and Water Clarity. Available online: https://www.fondriest.com/environmental-measurements/measurements/measuring-water-quality/turbidity-sensors-meters-and-methods/ (accessed on 2 November 2022).
- ISO 7027-1; Water Quality—Determination of Turbidity—Part 1: Quantitative Methods. International Organization for Standardization: Geneva, Switzerland, 2016.
- U.S. EPA. Method 180.1: Determination of Turbidity by Nephelometry. Available online: https://www.epa.gov/sites/production/files/2015-08/documents/method_180-1_1993.pdf (accessed on 5 December 2022).
- U.S. EPA. Office of Water (4606M) Guidance Manual for Compliance with the Surface Water Treatment Rules: Turbidity Provisions. EPA 815-R-20-004. Available online: https://www.epa.gov/dwreginfo/turbidity-provisions (accessed on 5 December 2022).
- Anderson, C.W. Turbidity: U.S. Geological Survey Techniques of Water-Resources Investigations, Book 9, Chap. A6.7, Version 2.1; US Geological Survey: Reston, VA, USA, 2005. [CrossRef]
- Kingsbury, F.B.; Clark, C.P.; Williams, G.; Post, A.L. The rapid determination of albumin in Urine. J. Lab. Clin. Med. 1926, 11, 981–989. [Google Scholar]
- Rice, E.W. The preparation of formazin standards for nephelometry. Anal. Chim. Acta 1976, 87, 251–253. [Google Scholar] [CrossRef]
- Kitchener, B.G.B.; Wainwright, J.; Parsons, A.J. A review of the principles of turbidity measurement. Prog. Phys. Geogr. 2017, 41, 620–642. [Google Scholar] [CrossRef] [Green Version]
- Rymszewicz, A.; O’Sullivan, J.J.; Bruen, M.; Turner, J.N.; Lawler, D.M.; Conroy, E.; Kelly-Quinn, M. Measurement differences between turbidity instruments, and their implications for suspended sediment concentration and load calculations: A sensor inter-comparison study. J. Environ. Manag. 2017, 199, 99–108. [Google Scholar] [CrossRef]
- Davies-Colley, R.; Hughes, A.O.; Vincent, A.G.; Heubeck, S. Weak numerical comparability of ISO-7027-compliant nephelometers. Ramifications for turbidity measurement applications. Hydrol. Process 2021, 35, e14399. [Google Scholar] [CrossRef]
- Kitchener, B.G.B.; Dixon, S.D.; Howarth, K.O.; Parsons, A.J.; Wainwright, J.; Bateman, M.D.; Cooper, J.R.; Hargrave, G.K.; Long, E.J.; Hewett, C.J.M. A low-cost bench-top research device for turbidity measurement by radially distributed illumination intensity sensing at multiple wavelengths. HardwareX 2019, 5, e00052. [Google Scholar] [CrossRef]
- Gantois, F.; Guigues, N.; Raveau, S.; Lepot, B.; Gal, F. Panorama de l’existant Sur Les Capteurs et Analyseurs En Ligne Pour La Mesure Des Paramètres Physico-Chimiques Dans l’eau. AQUA-REF 2016. Available online: https://www.aquaref.fr/panorama-existant-retour-experience-capteurs-analyseurs-ligne-mesure-parametres-physico-chimiques-ea (accessed on 5 December 2022).
- Fay, C.D.; Nattestad, A. Advances in optical based turbidity sensing using led photometry (Pedd). Sensors 2022, 22, 254. [Google Scholar] [CrossRef]
- Gillett, D.; Marchiori, A. A low-cost continuous turbidity monitor. Sensors 2019, 19, 3039. [Google Scholar] [CrossRef]
- Zang, Z.; Qiu, X.; Guan, Y.; Zhang, E.; Liu, Q.; He, X.; Guo, G.; Li, C.; Yang, M. A novel low-cost turbidity sensor for in-situ extraction in TCM using spectral components of transmitted and scattered light. Measurement 2020, 160, 107838. [Google Scholar] [CrossRef]
- Metzger, M.; Konrad, A.; Blendinger, F.; Modler, A.; Meixner, A.J.; Bucher, V.; Brecht, M. Low-cost GRIN-lens-based nephelometric turbidity sensing in the range of 0.1–1000 NTU. Sensors 2018, 18, 1115. [Google Scholar] [CrossRef]
- Parra, L.; Rocher, J.; Escrivá, J.; Lloret, J. Design and development of low cost smart turbidity sensor for water quality monitoring in fish farms. Aquac. Eng. 2018, 81, 10–18. [Google Scholar] [CrossRef]
- Kelley, C.D.; Krolick, A.; Brunner, L.; Burklund, A.; Kahn, D.; Ball, W.P.; Weber-Shirk, M. An affordable open-source turbidimeter. Sensors 2014, 14, 7142–7155. [Google Scholar] [CrossRef]
- Hydrolab OTT. Technical White Paper—4-Beam Turbidity. Available online: https://www.ott.com/products/sensors-108/4-beam-turbidity-sensor-quanta-only-168/productAction/outputAsPdf/ (accessed on 5 December 2022).
- Nguyen, B.; Goto, B.; Selker, J.S.; Udell, C. Hypnos board: A low-cost all-in-one solution for environment sensor power management, data storage, and task scheduling. HardwareX 2021, 10, e00213. [Google Scholar] [CrossRef] [PubMed]
- Thaler, A.; Sturdivant, K.; Neches, R.; Black, I. OpenCTD Construction and Operation. Available online: https://github.com/OceanographyforEveryone/OpenCTD (accessed on 5 December 2022).
- Venzac, B.; Deng, S.; Mahmoud, Z.; Lenferink, A.; Costa, A.; Bray, F.; Otto, C.; Rolando, C.; le Gac, S. PDMS curing inhibition on 3D-printed molds: Why? Also, how to avoid it? Anal. Chem. 2021, 93, 7180–7187. [Google Scholar] [CrossRef] [PubMed]
- Nightingale, A.M.; Hassan, S.U.; Warren, B.M.; Makris, K.; Evans, G.W.H.; Papadopoulou, E.; Coleman, S.; Niu, X. A droplet microfluidic-based sensor for simultaneous in situ monitoring of nitrate and nitrite in natural waters. Environ. Sci. Technol. 2019, 53, 9677–9685. [Google Scholar] [CrossRef] [PubMed]
- Anderson, C.W.; Survey, U.S.G. Chapter A6. Section 6.7. Turbidity; Version 2.1; US Geological Survey: Reston, VA, USA, 2005.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Range | Resolution | In Situ | Method | Reference |
|---|---|---|---|---|---|
| Fay et al. | 0–100 NTU 0–1000 NTU | N.A. | No | ISO 7027 | [24] |
| Kitchener et al. | N.A. | N.A. | No | TARDIIS | [22] |
| Gillett et al. | 0–100 NTU | 1 NTU | No (continuous) | Nephelometry | [25] |
| Trevathan et al. | 100–400 NTU | Yes | Attenuation | [3] | |
| Zang et al. | 40–300 NTU | 3 NTU | No | Nephelometry and attenuation | [26] |
| Matos et al. | 0–4000 NTU | N.A. | Yes | IR backscatter, nephelometry and attenuation | [2] |
| Metzger et al. | 0.1–1000 NTU | 0.04 to 3 NTU | No | ISO 7027 | [27] |
| Parra et al. | 0–200 NTU | N.A. | No | Attenuation | [28] |
| Kelley et al. | 0–1000 NTU | 0.02 NTU | No | Nephelometry | [29] |
| Our work | 0–100 NTU | 0.4 NTU | Yes | GLI-2 | N.A. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanchez, R.; Groc, M.; Vuillemin, R.; Pujo-Pay, M.; Raimbault, V. Development of a Frugal, In Situ Sensor Implementing a Ratiometric Method for Continuous Monitoring of Turbidity in Natural Waters. Sensors 2023, 23, 1897. https://doi.org/10.3390/s23041897
Sanchez R, Groc M, Vuillemin R, Pujo-Pay M, Raimbault V. Development of a Frugal, In Situ Sensor Implementing a Ratiometric Method for Continuous Monitoring of Turbidity in Natural Waters. Sensors. 2023; 23(4):1897. https://doi.org/10.3390/s23041897
Chicago/Turabian StyleSanchez, Raul, Michel Groc, Renaud Vuillemin, Mireille Pujo-Pay, and Vincent Raimbault. 2023. "Development of a Frugal, In Situ Sensor Implementing a Ratiometric Method for Continuous Monitoring of Turbidity in Natural Waters" Sensors 23, no. 4: 1897. https://doi.org/10.3390/s23041897
APA StyleSanchez, R., Groc, M., Vuillemin, R., Pujo-Pay, M., & Raimbault, V. (2023). Development of a Frugal, In Situ Sensor Implementing a Ratiometric Method for Continuous Monitoring of Turbidity in Natural Waters. Sensors, 23(4), 1897. https://doi.org/10.3390/s23041897