


A Novel Dual-Permanent-Magnet Mechanical Antenna for Pipeline Robot Localization and Communication




Abstract
:1. Introduction
2. Theoretical Analysis of the Novel Mechanical Antenna
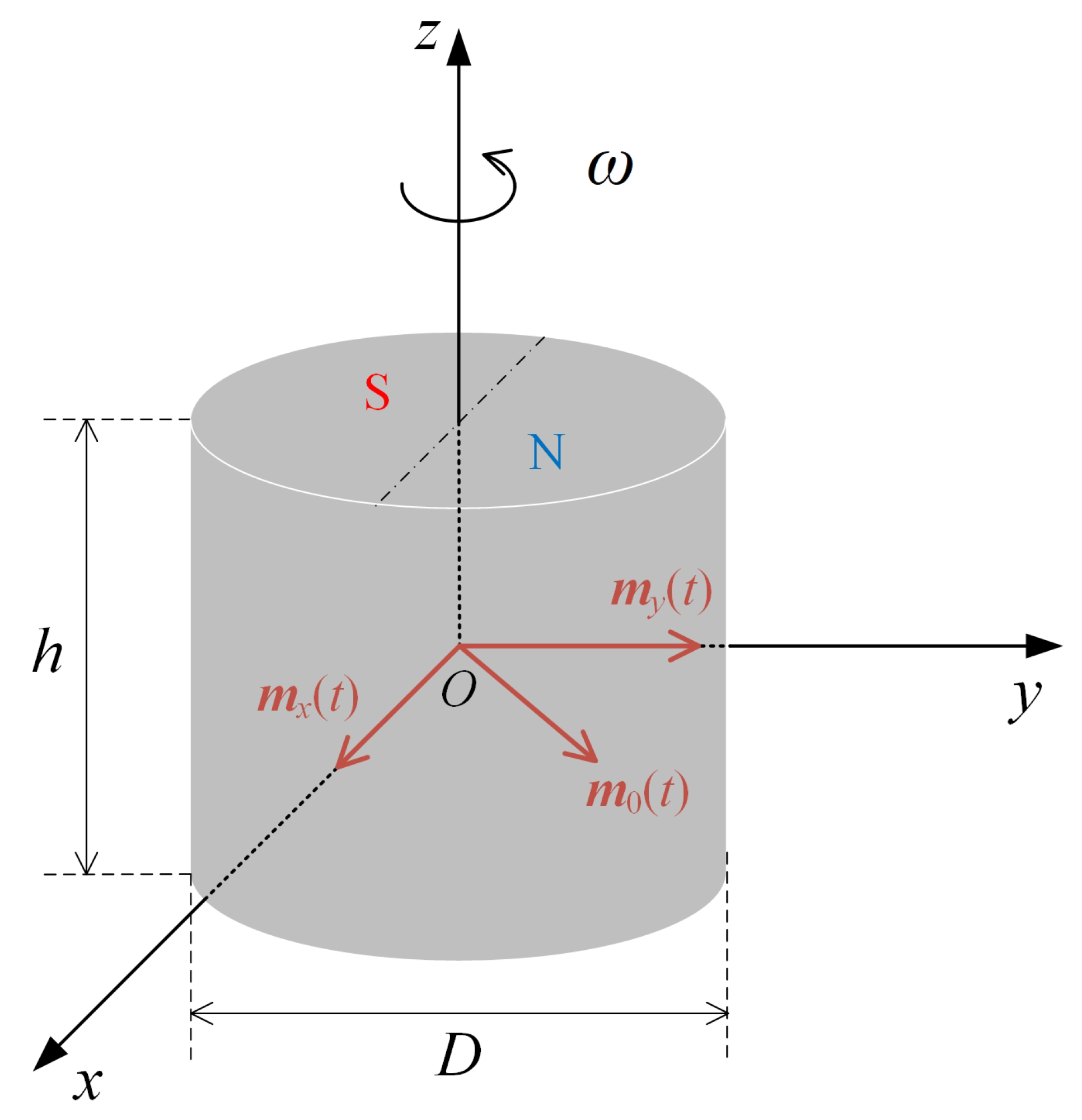
2.1. Theoretical Fundamentals
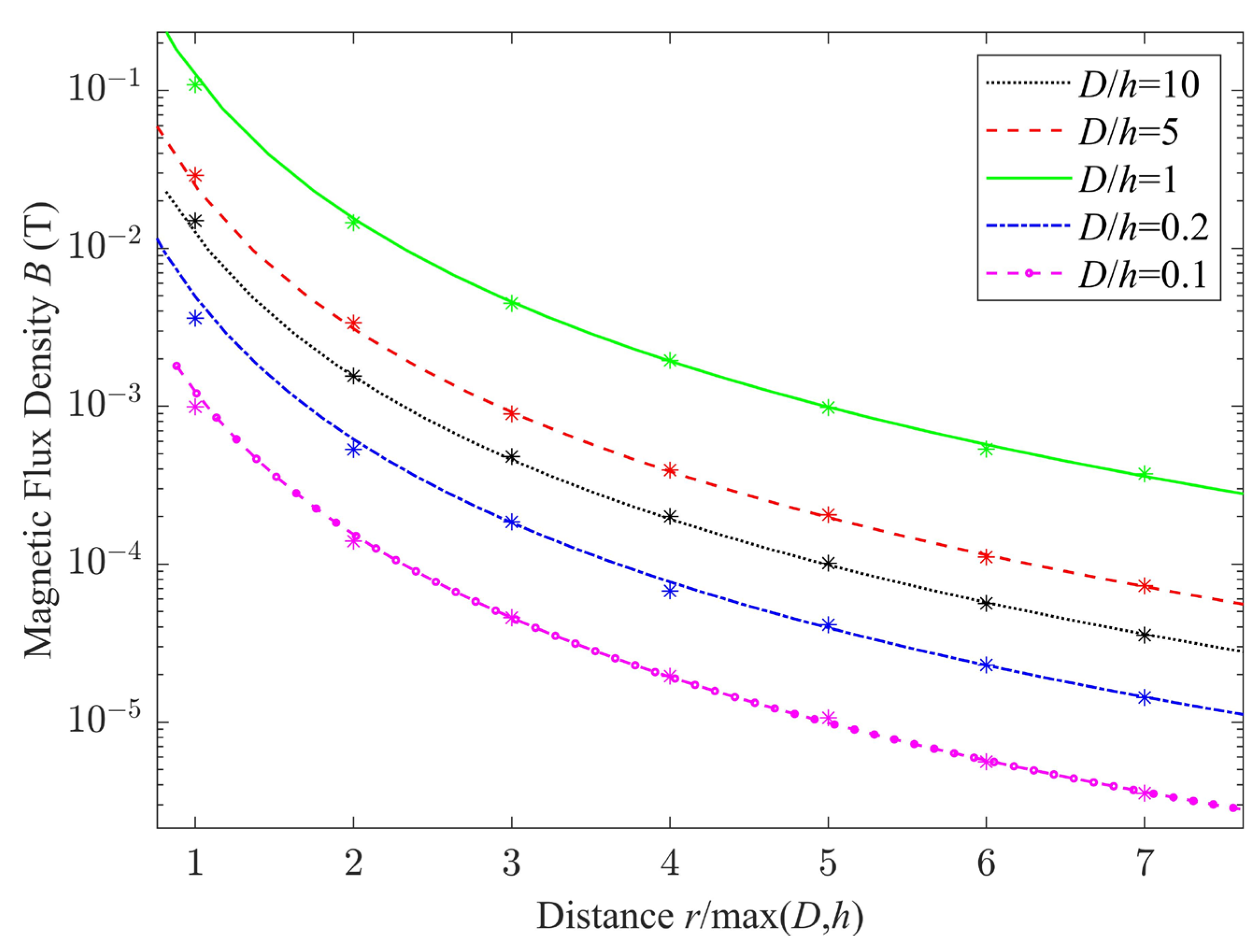
2.2. Effectiveness of the Analytical Formula
3. Development of the Novel Mechanical Antenna
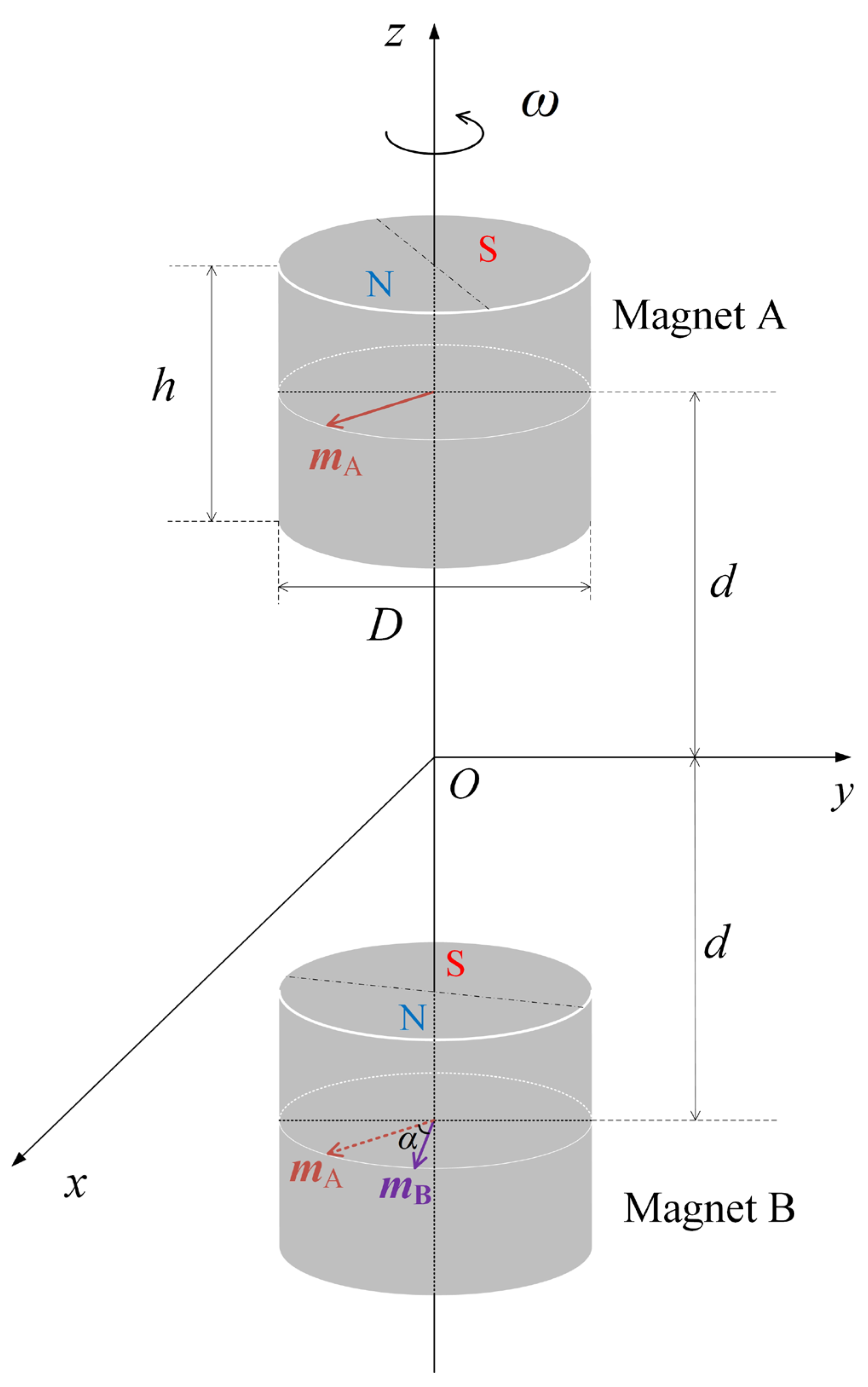
3.1. Dual-Permanent-Magnet Mechanical Antenna
3.2. Experiment in Air
3.3. Simulation and Experiments in Pipelines
4. Conclusions and Discussion
- a.
- The magnetization M0 and volume V of the permanent magnet. According to (3) and (4), the amplitude of the magnetic flux density increases linearly with M0 and V. Thus, M0 and V affect only the strength of the magnetic field and do not affect the modulation performance. Increasing M0 and V can improve the signal propagation distance. However, if V is substantially large, the overall volume and rotational inertia of the antenna will increase. Therefore, for a fixed propagation distance, a permanent magnetic material with a larger M0 can be selected without increasing the antenna volume.
- b.
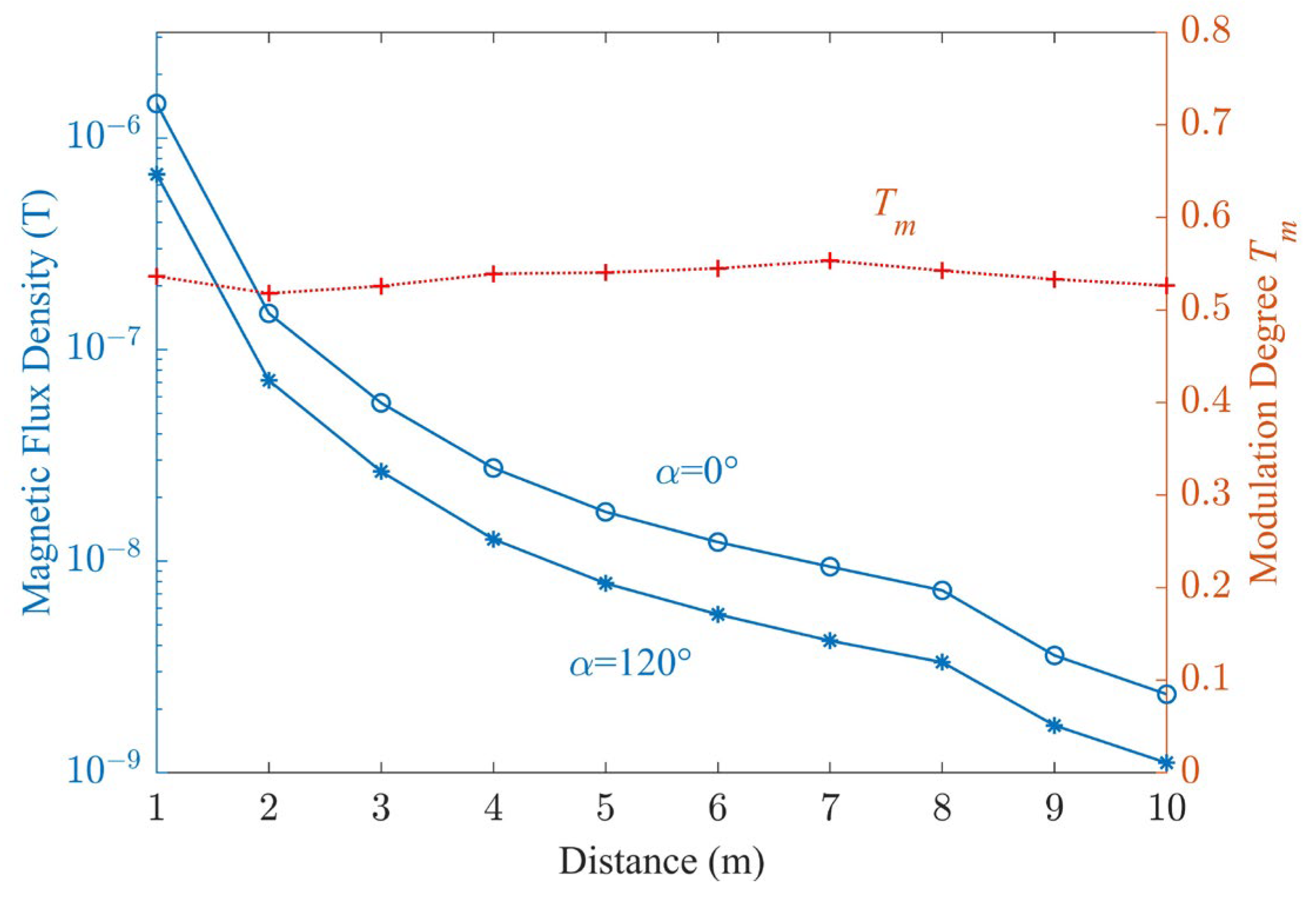
- The spacing d between the permanent magnets affects the near-field distribution and modulation performance of the antenna. When r >> max(D,h), the effect of d is negligible.
- c.
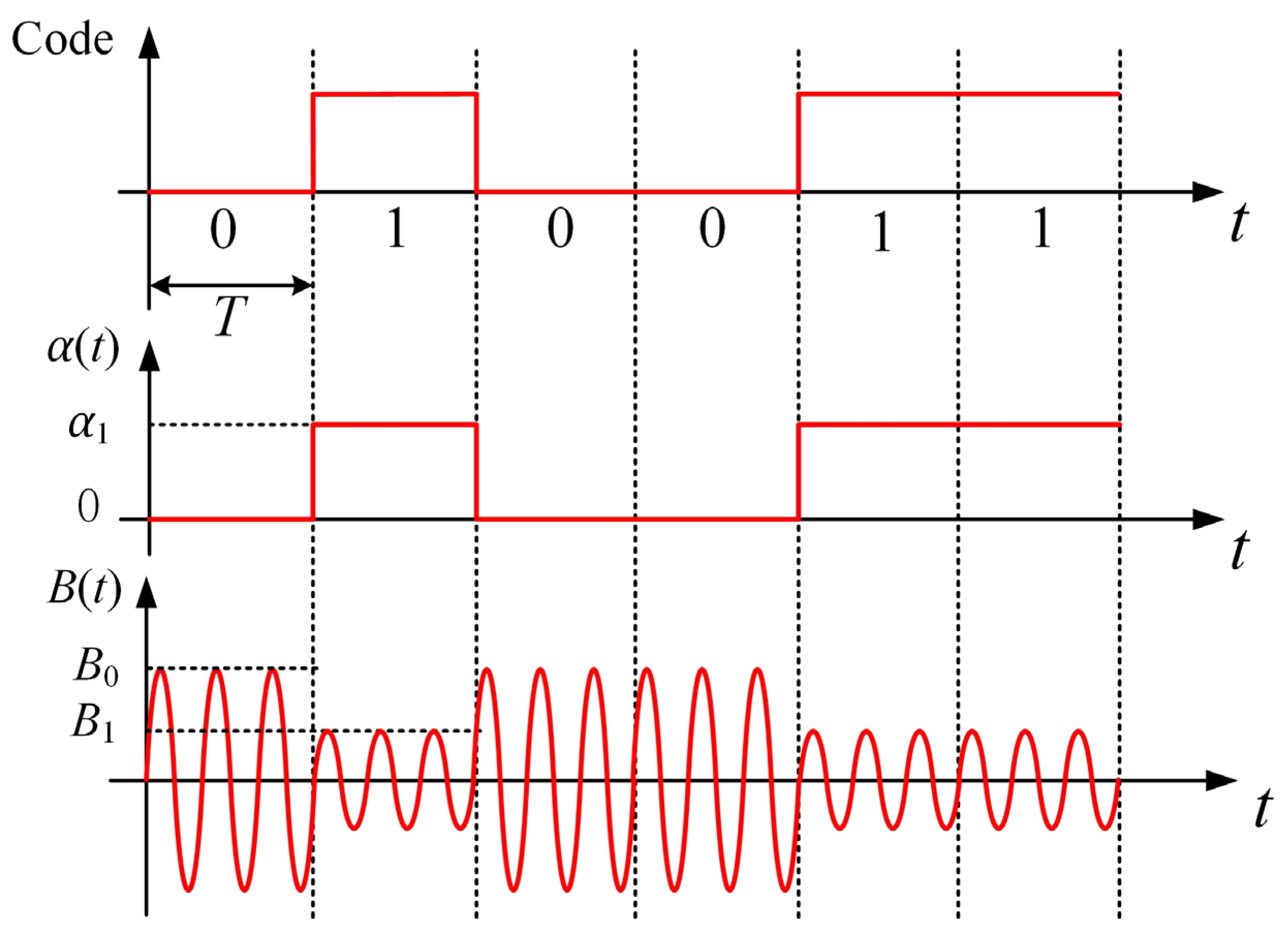
- The rotational speeds ω of the carrier motor and ω1 of the modulation motor. Due to the limits of power consumption and long communication distance in conductive media such as underground or underwater, ω cannot be too large. However, the symbol transmission rate v (bit/s) depends on both ω and ω1. Assume the time required for the change of α: or is t1, which is the switch time of the modulation motor from start to stop, and, to improve the demodulation accuracy at the receiver, the conditions and should be satisfied.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, H.R.; Ryew, S.M. Robotic system with active steering capability for internal inspection of urban gas pipelines. Mechatronics 2002, 12, 713–736. [Google Scholar] [CrossRef]
- Murayama, R.; Makiyama, S.; Kodama, M.; Taniguchi, Y. Development of an ultrasonic inspection robot using an electromagnetic acoustic transducer for a Lamb wave and an SH-plate wave. Ultrasonics 2004, 42, 825–829. [Google Scholar] [CrossRef] [PubMed]
- Jang, H.; Kim, T.Y.; Lee, Y.C.; Kim, Y.S.; Kim, J.; Lee, H.Y.; Choi, H.R. A review: Technological trends and development direction of pipeline robot systems. J. Intell. Robot. Syst. 2022, 105, 59. [Google Scholar] [CrossRef]
- Izumikawa, T.; Yaguchi, H. Movement of a cableless in-piping magnetic actuator with a new propulsion module. IEEE Trans. Magn. 2012, 48, 4196–4199. [Google Scholar] [CrossRef]
- Okamoto Jr, J.; Adamowski, J.C.; Tsuzuki, M.S.; Buiochi, F. Autonomous system for oil pipelines inspection. Mechatronics 1999, 9, 731–743. [Google Scholar] [CrossRef]
- Wang, Q.; Cai, M.; Guo, Z. An enhanced positioning technique for underground pipeline robot based on inertial sensor/wheel odometer. Measurement 2023, 206, 112298. [Google Scholar] [CrossRef]
- Xu, S.; Wang, G.; Wu, D. Research on internal positioning method of pipeline robot based on data fusion and point cloud registration. In Proceedings of the International Conference on Electronic Information Technology (EIT 2022), Chengdu, China, 18–20 May 2022. [Google Scholar]
- Chen, H.; Li, J.; Zhang, X.; Deng, Z. Application of visual servoing to an X-ray based welding inspection robot. In Proceedings of the 2005 International Conference on Control and Automation, Budapest, Hungary, 26–29 June 2005. [Google Scholar]
- Starý, M.; Novotný, F.; Horák, M.; Stará, M. Sampling robot for primary circuit pipelines of decommissioned nuclear facilities. Autom. Constr. 2020, 119, 103303. [Google Scholar] [CrossRef]
- Herbst, J. Non-destructive testing of sewer pipes by an acoustical method. In Proceedings of the 19th IEEE Instrumentation and Measurement Technology Conference, Anchorage, AK, USA, 21–23 May 2002. [Google Scholar]
- Fujiwara, S.; Kanehara, R.; Okada, T.; Sanemori, T. An articulated multi-vehicle robot for inspection and testing of pipeline interiors. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan, 26–30 July 1993. [Google Scholar]
- Qi, H.; Ye, J.; Zhang, X.; Chen, H. Wireless tracking and locating system for in-pipe robot. Sens. Actuator A Phys. 2010, 159, 117–125. [Google Scholar] [CrossRef]
- Qi, H.; Ye, J.; Zhang, X.; Chen, H. Tracing and localization system for pipeline robot. Mechatronics 2009, 19, 76–84. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, X.; Li, J. Ultra low frequency electromagnetic wave localization and application to pipeline robot. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006. [Google Scholar]
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Engel, A. Localization of a mobile platform equipped with a rotating magnetic dipole source. IEEE Trans. Instrum. Meas. 2018, 68, 116–128. [Google Scholar] [CrossRef]
- Tian, B.; Yang, Z.; Ji, S.; Chen, X.; Zhao, K. Numerical investigation on ELF electromagnetic field distribution of pipeline robot tracking and positioning system using UAV. J. Sens. 2022, 2022, 4247277. [Google Scholar] [CrossRef]
- Lu, S.; Feng, J.; Wu, J. A Time Weight Convolutional Neural Network for Positioning Internal Detector. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Chen, Y.L.; Liu, Z.C.; Li, A.; Ning, D.; Hou, J.; Zhang, Z.; Gong, Y. Three-dimensional positioning method of pipeline robots based on a rotating permanent magnet mechanical antenna. IEEE Sens. J. 2023; in press. [Google Scholar]
- Madanayake, A.; Choi, S.; Tarek, M.; Dharmasena, S.; Mandal, S.; Glickstein, J.; Sehirlioglu, A. Energy-efficient ULF/VLF transmitters based on mechanically-rotating dipoles. In Proceedings of the 2017 Moratuwa Engineering Research Conference, Moratuwa, Sri Lanka, 29–31 May 2017. [Google Scholar]
- Tarek, M.T.B.; Dharmasena, S.; Madanayake, A.; Choi, S.; Glickstein, J.; Liang, J.; Mandal, S. Power-efficient data modulation for all-mechanical ULF/VLF transmitters. In Proceedings of the 2018 IEEE 61st International Midwest Symposium on Circuits and Systems, Windsor, ON, Canada, 5–8 August 2018. [Google Scholar]
- Burch, H.C.; Garraud, A.; Mitchell, M.F.; Moore, R.C.; Arnold, D.P. Experimental generation of ELF radio signals using a rotating magnet. IEEE Trans. Antennas Propag. 2018, 66, 6265–6272. [Google Scholar] [CrossRef]
- Xu, Y.; Geng, J.; Zhao, X.; Zhuang, K.; Wang, K.; Wu, H.; Han, J.; Shen, J.; Jin, R.; Liang, X.; et al. Miniaturized super low frequency transmitting antenna based on the three-phase induction motor. Chin. J. Radio Sci. 2019, 34, 287–294. [Google Scholar]
- Strachen, N.D.; Booske, J.H.; Behdad, N. Mechanical super-low frequency (SLF) transmitter using electrically-modulated reluctance. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018. [Google Scholar]
- Strachen, N.; Booske, J.; Behdad, N. A mechanically based magneto-inductive transmitter with electrically modulated reluctance. PLoS ONE 2018, 13, e0199934. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barani, N.; Sarabandi, K. A frequency multiplier and phase modulation approach for mechanical antennas operating at super low frequency (SLF) band. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, GA, USA, 7–12 July 2019. [Google Scholar]
- Barani, N.; Kashanianfard, M.; Sarabandi, K. A mechanical antenna with frequency multiplication and phase modulation capability. IEEE Trans. Antennas Propag. 2021, 69, 3726–3739. [Google Scholar] [CrossRef]
- Gołkowski, M.; Park, J.; Bittle, J.; Babaiahgari, B.; Rorrer, R.A.; Celinski, Z. Novel mechanical magnetic shutter antenna for ELF/VLF radiation. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018; pp. 65–66. [Google Scholar]
- Li, X.; Wu, J.; Jin, H.; Li, Y. Development of low-frequency three-dimensional magnetic field measurement system. J. Astronaut. Metrol. Meas. 2021, 41, 33–37. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modulation Type | Literature | Implementation | Characteristics |
|---|---|---|---|
| FM | [19,20,21,22] | Change drive motor’s speed | Simple structure High power consumption Low bandwidth |
| PM | [25,26] | Needs a modulator | Complicated structure Insensitive to noise Complex in demodulation |
| AM | [23,24] | Needs a modulator | Normal in structure Sensitive to noise |
| This work | Needs a modulator | Normal in structure Lower sensitivity to noise |
| Condition | α (°) | Distance (m) | Bx (nT) | By (nT) | Bz (nT) |
|---|---|---|---|---|---|
| Without pipeline | 0 | 3 | 40.57 | 38.35 | 4.43 |
| With pipeline | 0 | 3 | 6.59 | 5.40 | 0.67 |
| Without pipeline | 120 | 3 | 19.17 | 18.16 | 2.83 |
| With pipeline | 120 | 3 | 2.88 | 2.51 | 0.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Wu, J.; Zhang, X.; Xie, T. A Novel Dual-Permanent-Magnet Mechanical Antenna for Pipeline Robot Localization and Communication. Sensors 2023, 23, 3228. https://doi.org/10.3390/s23063228
Dong Y, Wu J, Zhang X, Xie T. A Novel Dual-Permanent-Magnet Mechanical Antenna for Pipeline Robot Localization and Communication. Sensors. 2023; 23(6):3228. https://doi.org/10.3390/s23063228
Chicago/Turabian StyleDong, Yahao, Jing Wu, Xinran Zhang, and Tianyu Xie. 2023. "A Novel Dual-Permanent-Magnet Mechanical Antenna for Pipeline Robot Localization and Communication" Sensors 23, no. 6: 3228. https://doi.org/10.3390/s23063228
APA StyleDong, Y., Wu, J., Zhang, X., & Xie, T. (2023). A Novel Dual-Permanent-Magnet Mechanical Antenna for Pipeline Robot Localization and Communication. Sensors, 23(6), 3228. https://doi.org/10.3390/s23063228