

Change Point Detection for Fine-Grained MFR Work Modes with Multi-Head Attention-Based Bi-LSTM Network

Abstract
:1. Introduction
- The Bi-LSTM learns the long-term dependencies between past and future, and the Multi-Head Attention (MHA) mechanism helps the model to focus on multiple aspects of the most informative features to reduce the impact of non-ideal observations and other useless features. Thus, the performance of the proposed method on CPD is also improved.
- This paper design a new label configuration and utilize a weighted binary cross entropy (wBCE) loss function for training, which effectively addresses the problem of sparse change point labels.
- Simulation results show that the proposed CPD method is superior to other methods for fine-grained work modes, and has robustness under non-ideal conditions.
2. Problem Formation
2.1. Fine-Grained MFR Work Modes
2.1.1. Basic PRI Models under Ideal Conditions
2.1.2. Non-Ideal Observation of PRI Sequence
2.2. CPD for PRI Sequence
2.2.1. Change Point Definition
2.2.2. Fine-Grained MFR Work Mode CPD Task
3. The Proposed Approach
3.1. The Proposed Framework for CPD
3.2. Data Normalization
3.3. Label Configuration
3.4. MHAB Networks
3.4.1. Feature Extraction Module
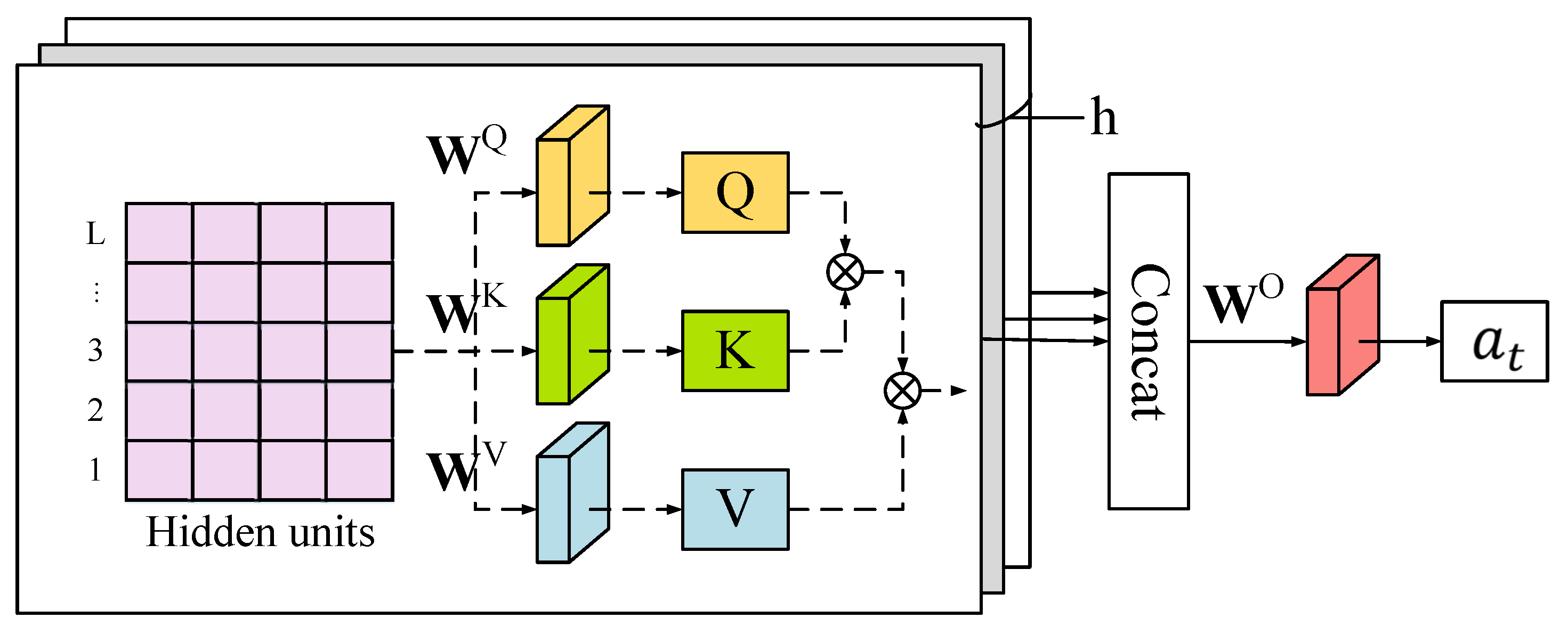
3.4.2. Multi-Head Attention Module
3.4.3. Classifier
4. Simulations and Analysis
4.1. Simulations Design
4.1.1. Dataset Description
4.1.2. Evaluation Metrics
4.1.3. Simulation Implementation
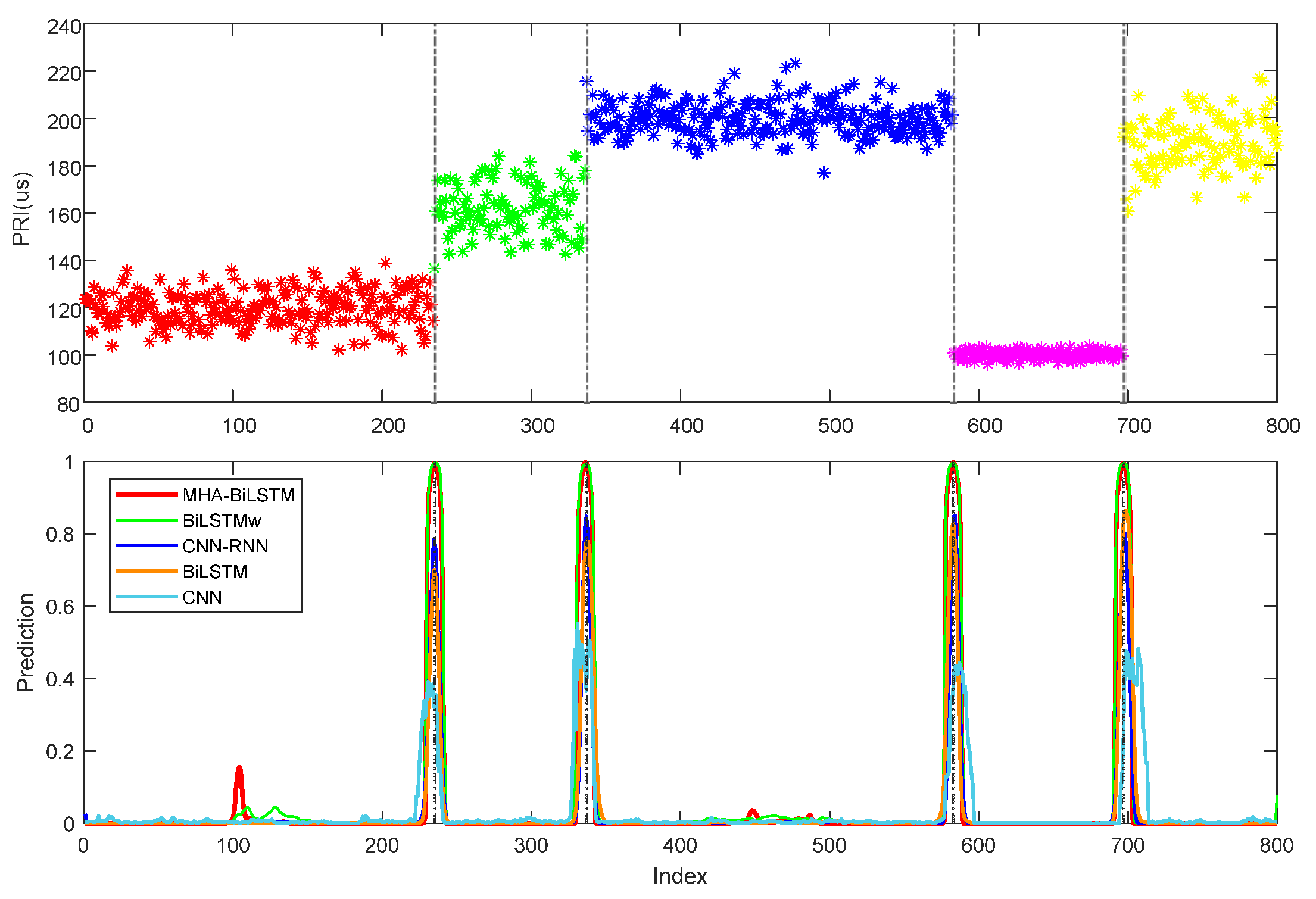
4.2. Validation of Basic CPD Performance
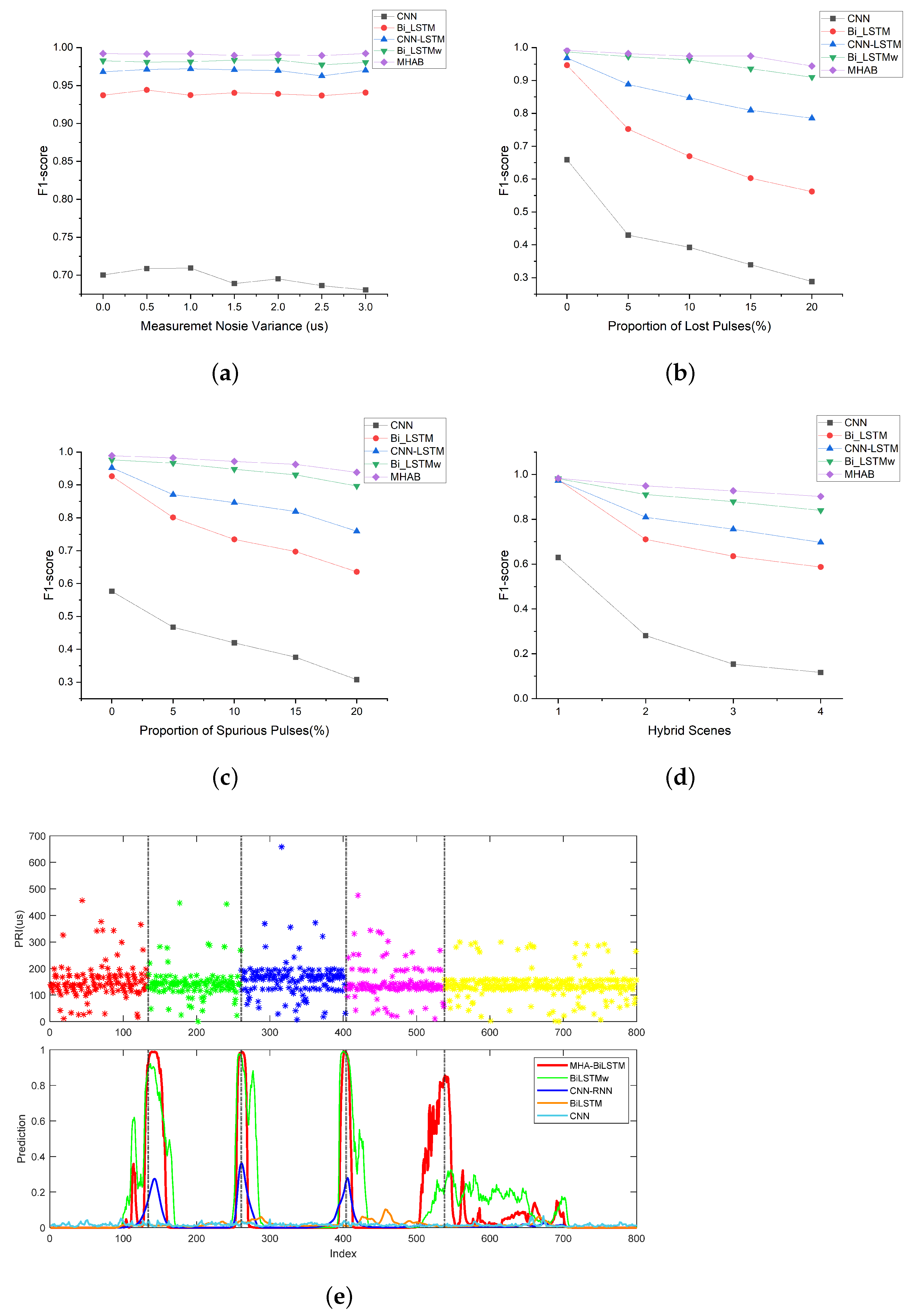
4.3. Performance under Non-Ideal Conditions
4.4. Comparison of Different Framework Structures and Experimental Settings
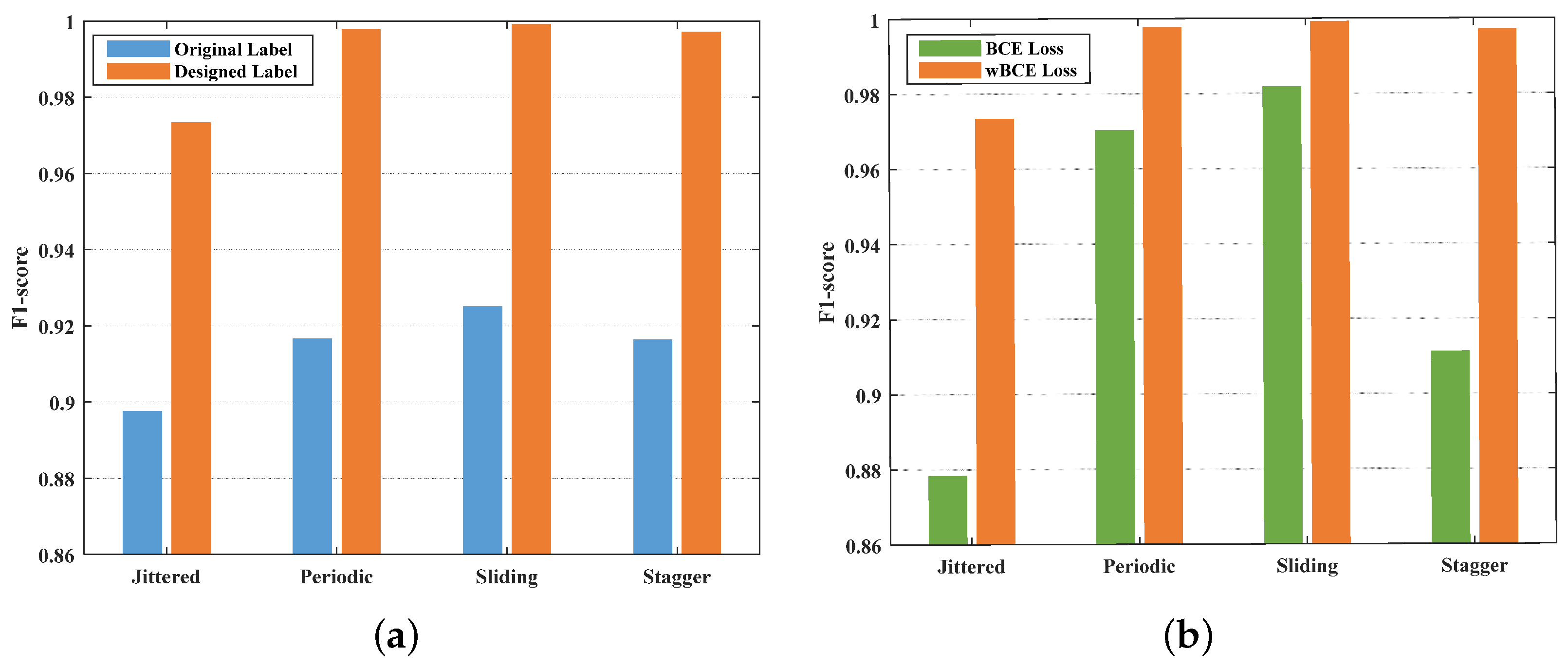
4.4.1. Influence of Label Configuration
4.4.2. Influence of WBCE Loss Function
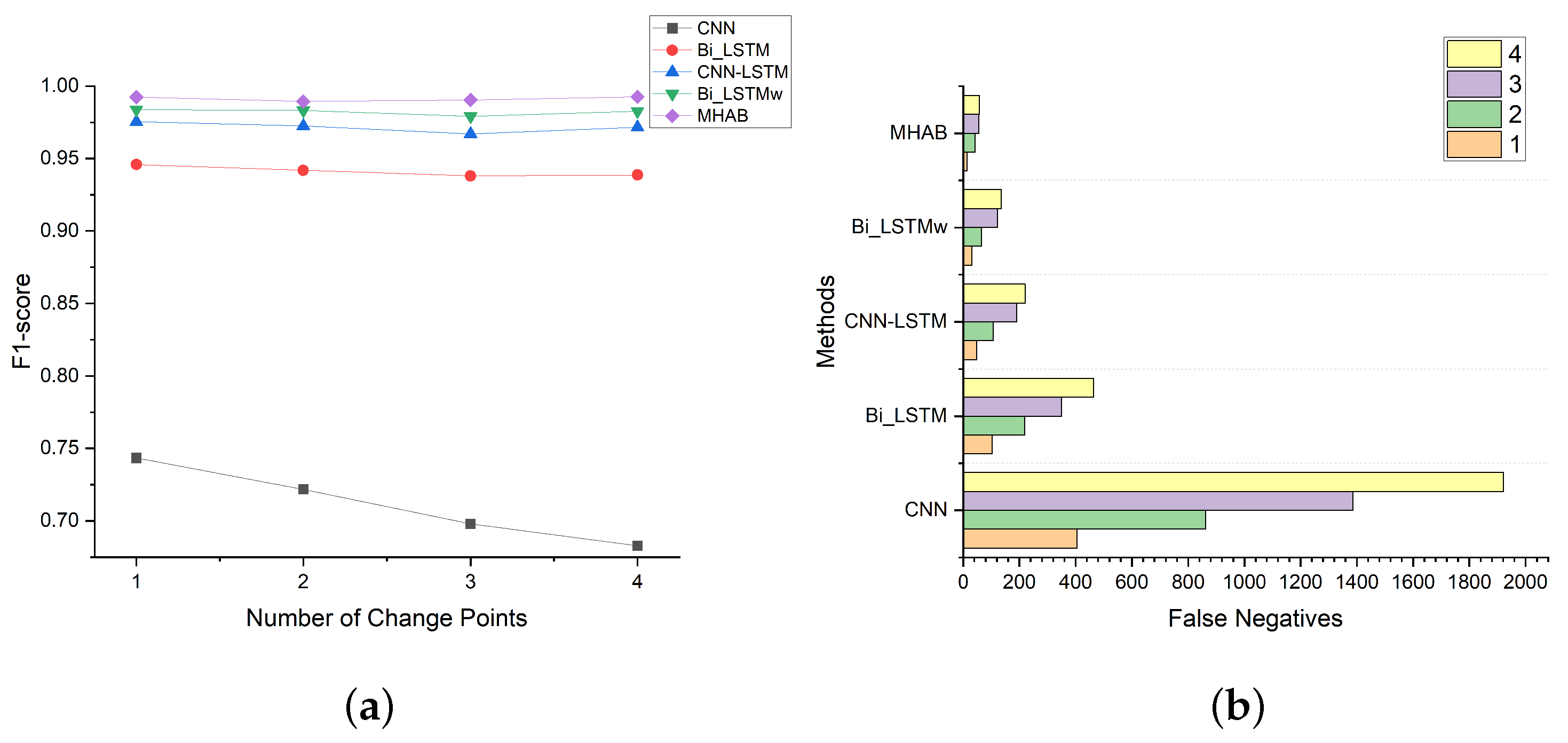
4.4.3. Influence of Change Point Numbers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| BCE | Binary Cross Entropy |
| Bi-LSTM | Bi-directional Long Short-Term Memory |
| Bi-LSTMw | Bi-LSTM with wBCE loss function |
| CNN | Convolutional Neural Network |
| CNN-LSTM | CNN and LSTM |
| CPD | Change Point Detection |
| DL | Deep Learning |
| ESM | Electronic Support Measurement |
| FC | Fully Connected |
| FN | False Negative |
| FP | False Positive |
| F1 | F1-score |
| GWN | Gaussian White Noise |
| LPO | Lost Pulse Only |
| LSTM | Long Short-Term Memory |
| MFR | Multi-Functional Radar |
| MHA | Multi-Head Attention |
| MHAB | Multi-Head Attention-based Bi-LSTM |
| MNO | Measurement Noise Only |
| Probability Fensity Function | |
| PDW | Pulse Descriptive Word |
| PRI | Pulse Repetition Interval |
| PW | Pulse Width |
| RF | Radio Frequency |
| RNN | Recurrent Neural Network |
| SPO | Spurious Pulse Only |
| TP | True Positive |
| wBCE | weighted Binary Cross Entropy |
| TOA | Time Of Arrival |
References
- Wang, A.; Krishnamurthy, V. Threat Estimation of Multifunction Radars: Modeling and Statistical Signal Processing of Stochastic Context Free Grammars. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing—ICASSP ’07, Honolulu, HI, USA, 16–20 April 2007; Volume 3, pp. III–793–III–796. [Google Scholar] [CrossRef]
- Tartakovsky, A.; Nikiforov, I.; Basseville, M. Sequential Analysis: Hypothesis Testing and Changepoint Detection; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Aminikhanghahi, S.; Cook, D.J. A survey of methods for time series change point detection. Knowl. Inf. Syst. 2017, 51, 339–367. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chib, S. Estimation and comparison of multiple change-point models. J. Econom. 1998, 86, 221–241. [Google Scholar] [CrossRef]
- Adams, R.P.; MacKay, D.J. Bayesian online changepoint detection. arXiv 2007, arXiv:0710.3742. [Google Scholar] [CrossRef]
- Harchaoui, Z.; Moulines, E.; Bach, F. Kernel Change-point Analysis. In Proceedings of the Advances in Neural Information Processing Systems 21, Vancouver, BC, Canada, 8–10 December 2008; Volume 21, pp. 609–616. [Google Scholar]
- Kawahara, Y.; Sugiyama, M. Sequential change-point detection based on direct density-ratio estimation. Stat. Anal. Data Min. 2012, 5, 114–127. [Google Scholar] [CrossRef]
- Fang, Y.; Bi, D.; Pan, J.; Chen, Q. Multi-function Radar Behavior State Detection Algorithm based on Bayesian Criterion. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; Volume 1, pp. 213–217. [Google Scholar] [CrossRef]
- Boers, Y.; Driessen, H.; Zwaga, J. Adaptive MFR parameter control: Fixed against variable probabilities of detection. IEEE Proc.-Radar Sonar Navig. 2006, 153, 2–6. [Google Scholar] [CrossRef]
- Ma, S.; Liu, Z.; Jiang, W. A Method for Multifunction Radar Pulse Train Analysis Based on Amplitude Change Point Detection. Acta Electron. Sin. 2013, 41, 1436–1441. [Google Scholar] [CrossRef]
- Xiang, Y.; Akcakaya, M.; Sen, S.; Nehorai, A. Target Detection via Cognitive Radars Using Change-Point Detection, Learning, and Adaptation. Circuits Syst. Signal Process. 2021, 40, 233–261. [Google Scholar] [CrossRef]
- Bao, J.; Li, Y.; Zhu, M.; Zhang, W. Online Detection Method of Multi-Function Radar Work Mode Changepoints Non-ideal Observations. Acta Electonica Sin. 2022, 50, 1291–1300. [Google Scholar] [CrossRef]
- Bao, J.; Li, Y.; Zhu, M.; Wang, S. Online Parameter Estimation and Change Point Detection for Multi-function Radar Pulse Sequence Based on the Bayesian Non-parametric HMM. arXiv 2023, arXiv:2302.04407. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q. An improved algorithm for PRI modulation recognition. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xiamen, China, 22–25 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Hammerla, N.Y.; Halloran, S.; Plötz, T. Deep, convolutional, and recurrent models for human activity recognition using wearables. arXiv 2016, arXiv:1604.08880. [Google Scholar] [CrossRef]
- Truong, C.; Oudre, L.; Vayatis, N. Selective review of offline change point detection methods. Signal Process. 2020, 167, 107299. [Google Scholar] [CrossRef] [Green Version]
- Bhuvaneshwari, P.; Rao, A.N.; Robinson, Y.H.; Thippeswamy, M.N. Sentiment analysis for user reviews using Bi-LSTM self-attention based CNN model. Multimed. Tools Appl. 2022, 81, 12405–12419. [Google Scholar] [CrossRef]
- Qu, Z.; Wang, W.; Hou, C.; Hou, C. Radar Signal Intra-Pulse Modulation Recognition Based on Convolutional Denoising Autoencoder and Deep Convolutional Neural Network. IEEE Access 2019, 7, 112339–112347. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.M.; Huang, Z. Denoising of Radar Pulse Streams With Autoencoders. IEEE Commun. Lett. 2020, 24, 797–801. [Google Scholar] [CrossRef]
- Li, X.; Huang, Z.; Wang, F.; Wang, X.; Liu, T. Toward Convolutional Neural Networks on Pulse Repetition Interval Modulation Recognition. IEEE Commun. Lett. 2018, 22, 2286–2289. [Google Scholar] [CrossRef]
- Han, J.W.; Park, C.H. A Unified Method for Deinterleaving and PRI Modulation Recognition of Radar Pulses Based on Deep Neural Networks. IEEE Access 2021, 9, 89360–89375. [Google Scholar] [CrossRef]
- Cain, L.; Clark, J.; Pauls, E.; Ausdenmoore, B.; Clouse, R.; Josue, T. Convolutional neural networks for radar emitter classification. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 79–83. [Google Scholar] [CrossRef]
- Liu, Z.M.; Yu, P.S. Classification, Denoising, and Deinterleaving of Pulse Streams With Recurrent Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1624–1639. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, M.; Ma, Y.; Yang, J. Work modes recognition and boundary identification of MFR pulse sequences with a hierarchical seq2seq LSTM. IET Radar Sonar Navig. 2020, 14, 1343–1353. [Google Scholar] [CrossRef]
- Zhu, M.; Zhang, Z.; Li, C.; Li, Y. JMRPE-Net: Joint modulation recognition and parameter estimation of cognitive radar signals with a deep multitask network. IET Radar Sonar Navig. 2021, 15, 1508–1524. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.; Huang, Z. Attention-Based Radar PRI Modulation Recognition With Recurrent Neural Networks. IEEE Access 2020, 8, 57426–57436. [Google Scholar] [CrossRef]
- Visnevski, N.A. Syntactic Modeling of Multi-Function Radars. Ph.D. Thesis, McMaster University, Hamilton, ON, Canada, 2005. [Google Scholar]
- Zhang, Z.; Zhu, M.; Li, Y.; Li, Y.; Wang, S. Joint Recognition and Parameter Estimation of Cognitive Radar Work Modes with Lstm-Transformer. 2022. Available online: https://doi.org/10.2139/ssrn.4135044 (accessed on 2 February 2022).
- Zhu, M.; Wang, S.; Li, Y. Model-Based Representation and Deinterleaving of Mixed Radar Pulse Sequences With Neural Machine Translation Network. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1733–1752. [Google Scholar] [CrossRef]
- Zhu, M.; Li, Y.; Wang, S. Model-Based Time Series Clustering and Interpulse Modulation Parameter Estimation of Multifunction Radar Pulse Sequences. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3673–3690. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Gers, F.A.; Schmidhuber, J.; Cummins, F. Learning to Forget: Continual Prediction with LSTM. Neural Comput. 2000, 12, 2451–2471. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Lattari, F.; Rucci, A.; Matteucci, M. A Deep Learning Approach for Change Points Detection in InSAR Time Series. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Parameters | Ranges |
|---|---|---|
| Jittered | Mean of jittered value | U(100 µs, 200 µs) 1 |
| Variance of jittered values | [1 µs, 4 µs, 7 µs, 10 µs] | |
| Periodic | Center value | U(100 µs, 200 µs) |
| Modulation amplitude | U(10%, 20%) | |
| Sampling frequency | U(2 fc, 8 fc) | |
| Center frequency | 50 Hz | |
| Sliding | Initial value | U(10 µs, 30 µs) |
| Rate | U(2, 6) | |
| Number of sliding steps | U(10, 30) | |
| Stagger | Range of stagger value | U(100 µs, 200 µs) |
| Number of stagger steps | U(3, 10) |
| Scene | Measurement Noise (µs) | Lost Pulse (%) | Lost Pulse (%) |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 1 | 5 | 5 |
| 3 | 2 | 10 | 10 |
| 4 | 3 | 15 | 15 |
| Method | Jittered | Periodic | Sliding | Stagger | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| TP↑ | FN↓ | F1↑ 1 | TP↑ | FN↓ | F1↑ | TP↑ | FN↓ | F1↑ | TP↑ | FN↓ | F1↑ | |
| CNN | 1236 | 1234 | 0.6670 | 1403 | 1089 | 0.7202 | 1154 | 1299 | 0.6392 | 1560 | 940 | 0.7641 |
| Bi-LSTM | 2211 | 259 | 0.9447 | 2036 | 457 | 0.8991 | 2318 | 135 | 0.9717 | 2224 | 276 | 0.9416 |
| CNN-LSTM | 2221 | 249 | 0.9469 | 2317 | 175 | 0.9636 | 2315 | 138 | 0.9711 | 2396 | 104 | 0.9788 |
| Bi-LSTMw | 2266 | 204 | 0.9569 | 2428 | 84 | 0.9870 | 2422 | 31 | 0.9936 | 2448 | 52 | 0.9895 |
| MHAB | 2342 | 128 | 0.9734 | 2481 | 11 | 0.9978 | 2449 | 4 | 0.9992 | 2486 | 14 | 0.9972 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Zhai, Q.; Zhang, Z.; Yang, J. Change Point Detection for Fine-Grained MFR Work Modes with Multi-Head Attention-Based Bi-LSTM Network. Sensors 2023, 23, 3326. https://doi.org/10.3390/s23063326
Fang Y, Zhai Q, Zhang Z, Yang J. Change Point Detection for Fine-Grained MFR Work Modes with Multi-Head Attention-Based Bi-LSTM Network. Sensors. 2023; 23(6):3326. https://doi.org/10.3390/s23063326
Chicago/Turabian StyleFang, Yiying, Qihang Zhai, Ziwei Zhang, and Jing Yang. 2023. "Change Point Detection for Fine-Grained MFR Work Modes with Multi-Head Attention-Based Bi-LSTM Network" Sensors 23, no. 6: 3326. https://doi.org/10.3390/s23063326
APA StyleFang, Y., Zhai, Q., Zhang, Z., & Yang, J. (2023). Change Point Detection for Fine-Grained MFR Work Modes with Multi-Head Attention-Based Bi-LSTM Network. Sensors, 23(6), 3326. https://doi.org/10.3390/s23063326