


A Scheduling Method of Using Multiple SAR Satellites to Observe a Large Area


Abstract
:1. Introduction
2. Materials and Methods
2.1. Problem Description
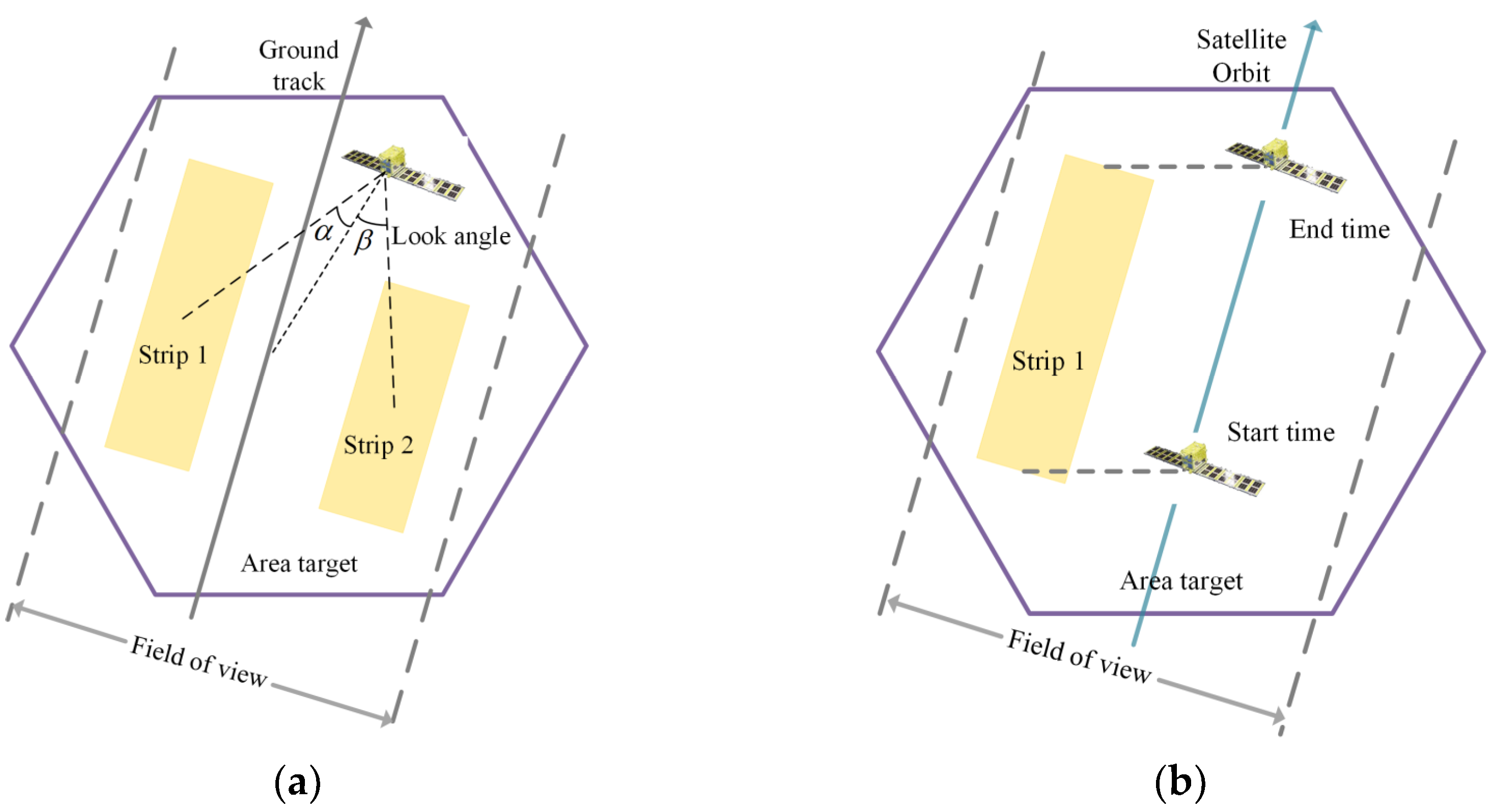
- Observation opportunity:
- Observation pattern:
- Schedule:
2.2. Problem Formulation
2.2.1. Assumptions and Simplifications
- All the SAR satellites will only perform this mission during the given schedule time horizon and there is only one SAR running on a SAR satellite;
- Operation mode of the SAR is the broadside strip;
- Only one observation pattern, namely, one candidate strip, is selected for each observation opportunity;
- No consideration is given to the data download process of the SAR images captured by satellites;
- Resolution variation in the SAR satellites during one mission is considered acceptable in a certain range.
2.2.2. Sets and Parameters
- , the imaging request for the specified target area from the customer. The attributes of are defined as follows:A is the target area to be imaged.B is the required start time of .E is the required end time of .
- , the set of SAR satellites. The attributes of are defined as follows:is the maximum imaging duration of a single orbit of .is the maximum look angle of .
- is the set of observation opportunities of during the given schedule time horizon. For , the following attributes are defined:is the calculated start time of .is the calculated end time of .
- is the set of observation patterns of . For , the following attributes are defined:is the calculated start time of .is the calculated end time of .is the maximum look angle of .
- Two functions, and involved in the mathematical formulation are defined as follows:
- Decision variable:
2.2.3. Mathematical Formulation
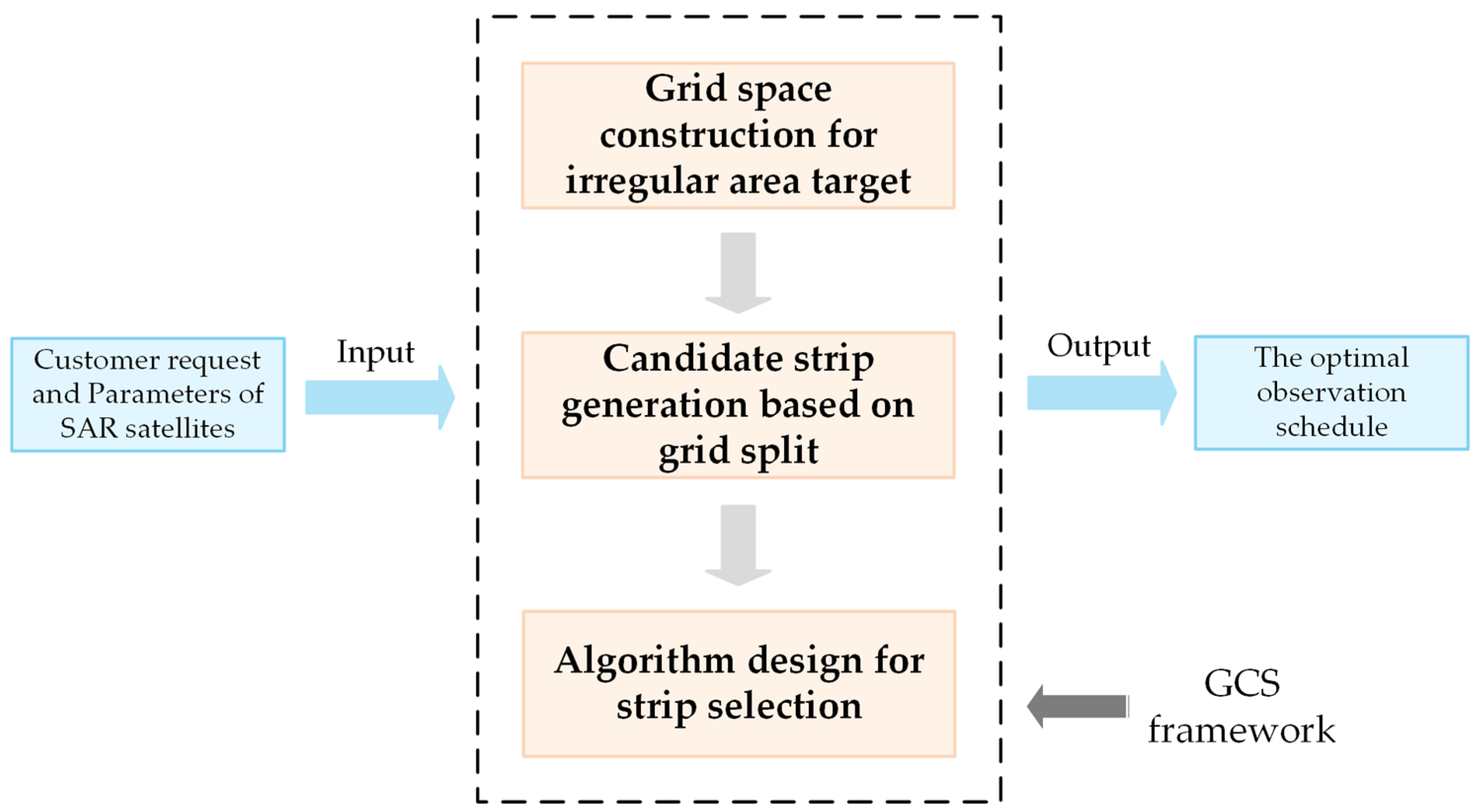
2.3. Three-Phase Method (GCS)
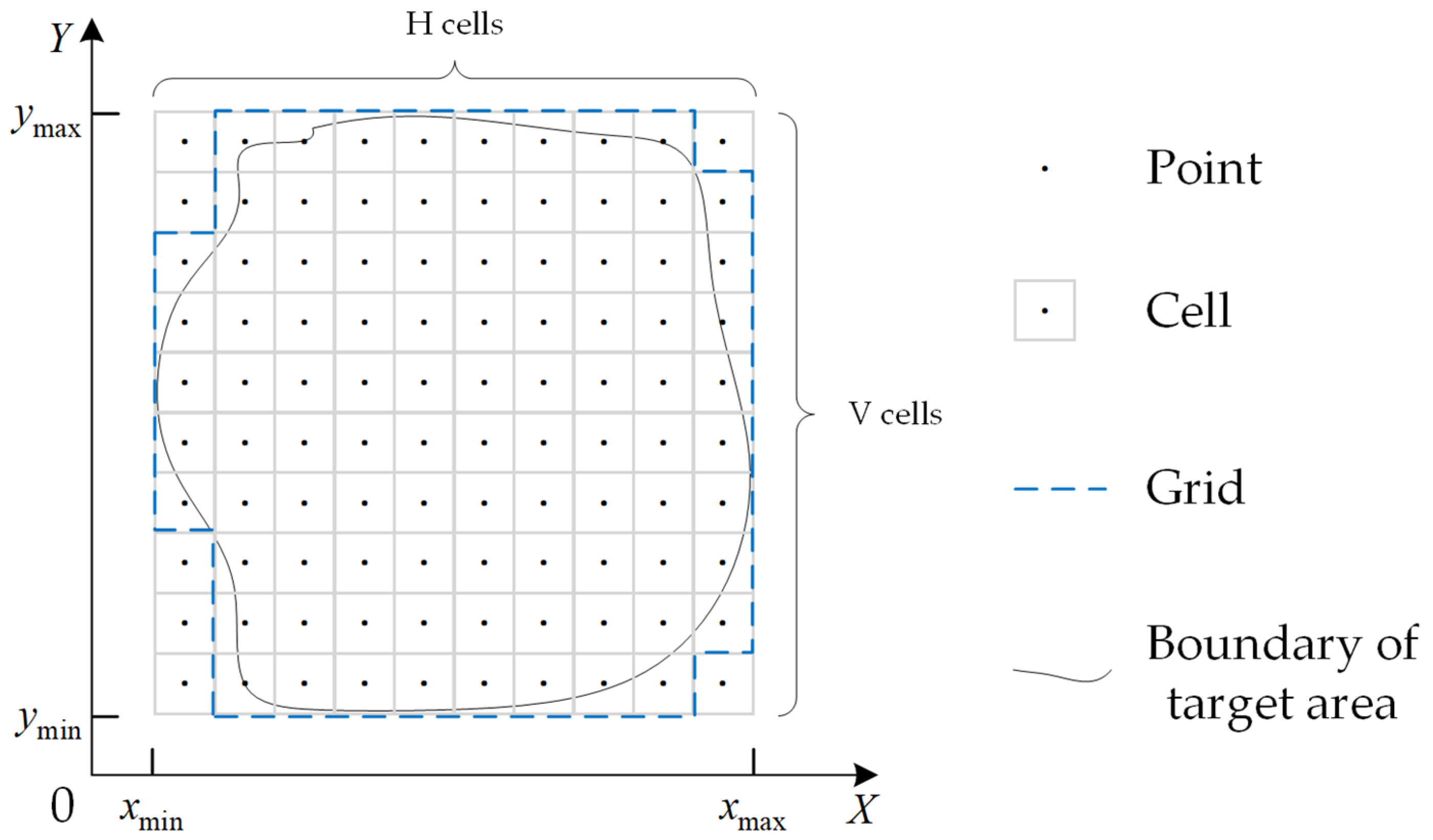
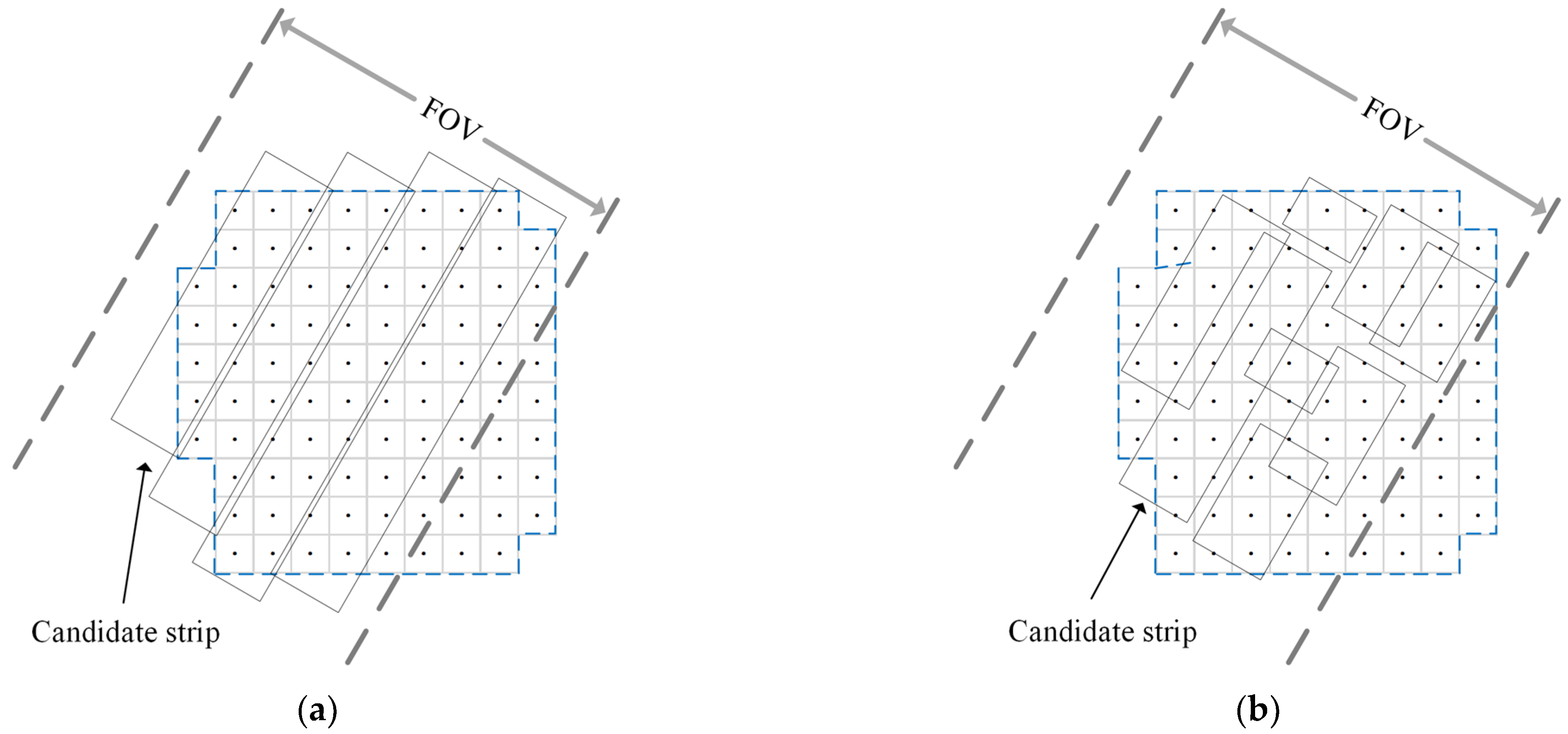
2.3.1. Grid Space Construction
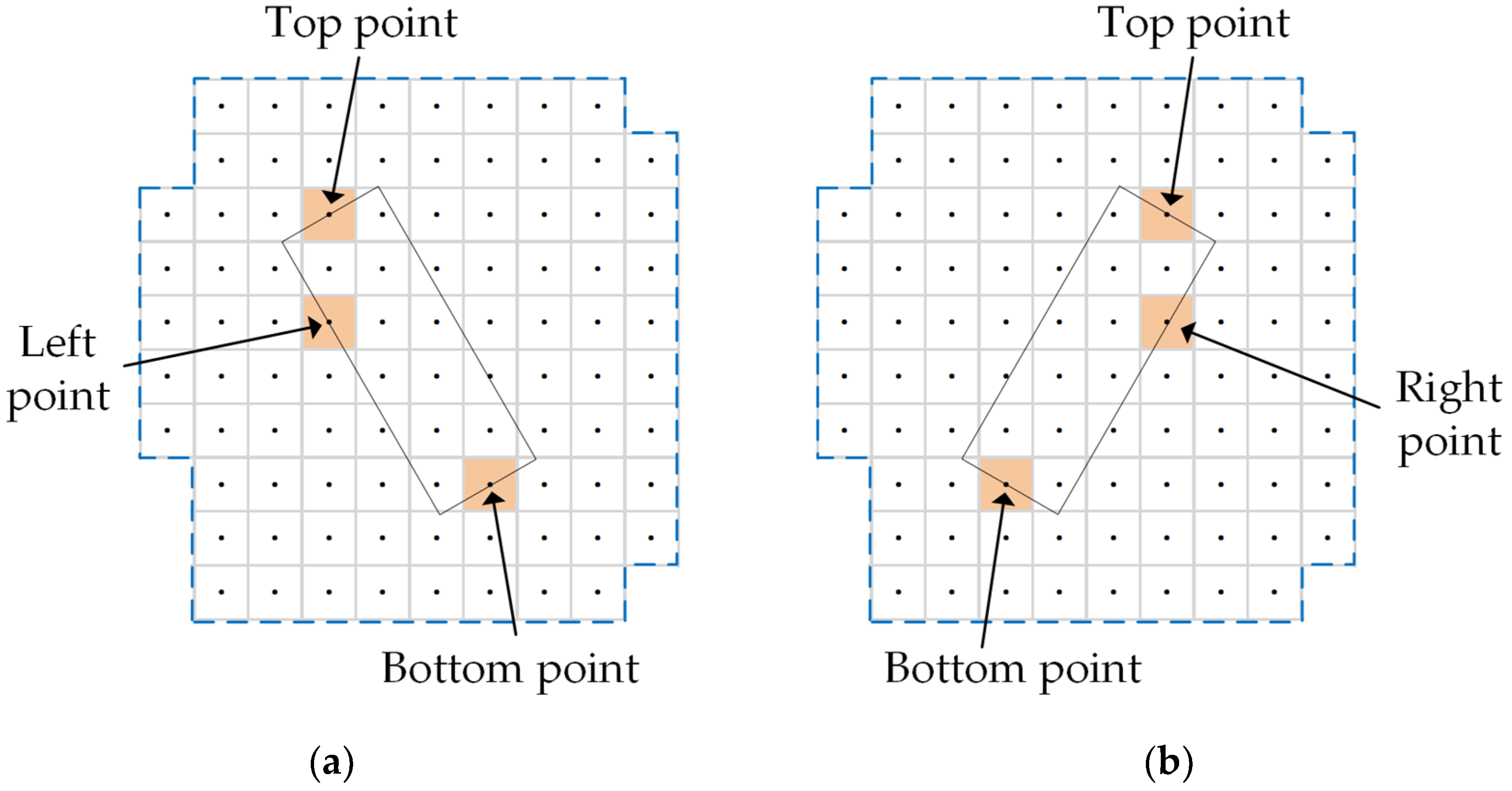
2.3.2. Candidate Strip Generation
| Algorithm 1 Candidate strip generation algorithm. |
| Input: Imaging opportunity and the set of points. Output: The set of candidate strips. for for for if three points meet constraints of generate candidate strip according to and ; then end end end end |
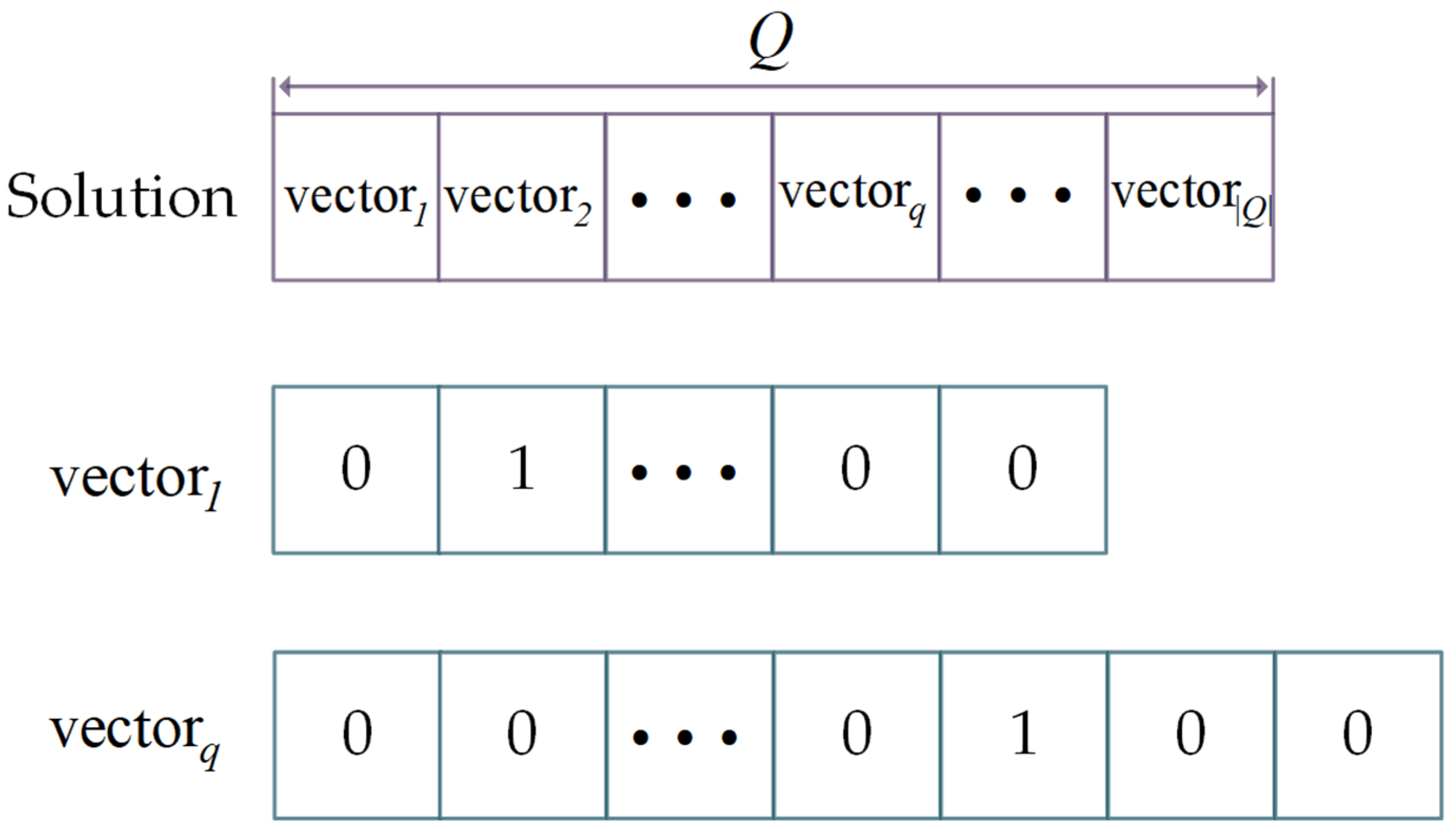
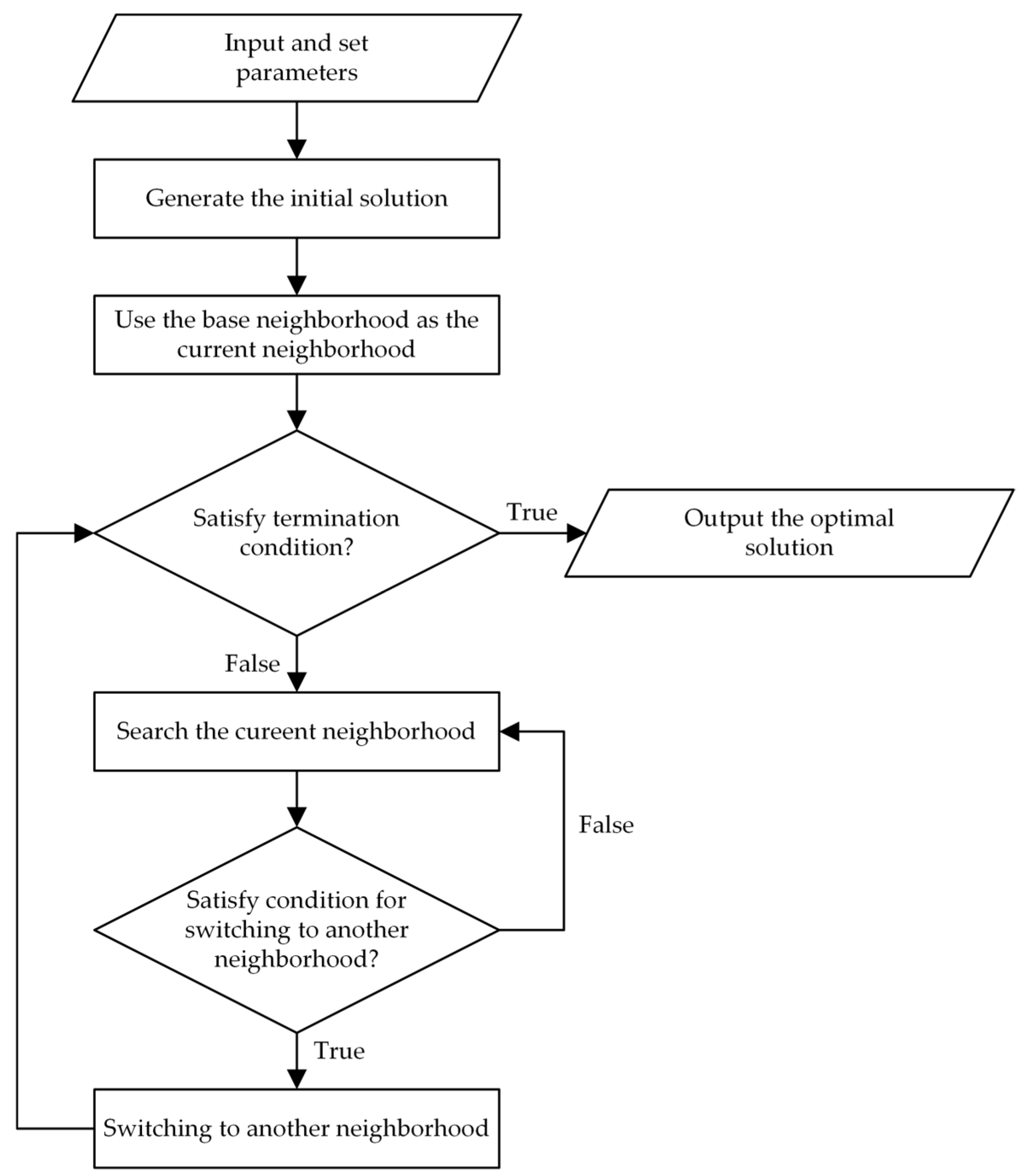
2.3.3. Strip Selection Phase
- Base neighborhood:
- Extended neighborhood:
| Algorithm 2 Steps of variable neighborhood tabu search algorithm. |
| Input: Candidate strips and imaging opportunities. Output: The feasible observation solution yielding the maximal profit. Set tabu length, termination condition and neighborhood switching condition; Generate initial solution ; Use as the current solution and current optimal solution; Use the base neighborhood as the current neighborhood structure; while not termination-condition do Generate the current neighborhood of current solution ; Select a new solution from according to Metropolis-criterion; if switching condition for another neighborhood structure then Switching to another neighborhood structure; end if updating the tabu list, current solution and current optimal solution. end while return current optimal solution; |
3. Results and Discussion
3.1. Simulation Parameters
3.1.1. Imaging SAR Satellites
3.1.2. Imaging Areas
3.1.3. Imaging Time
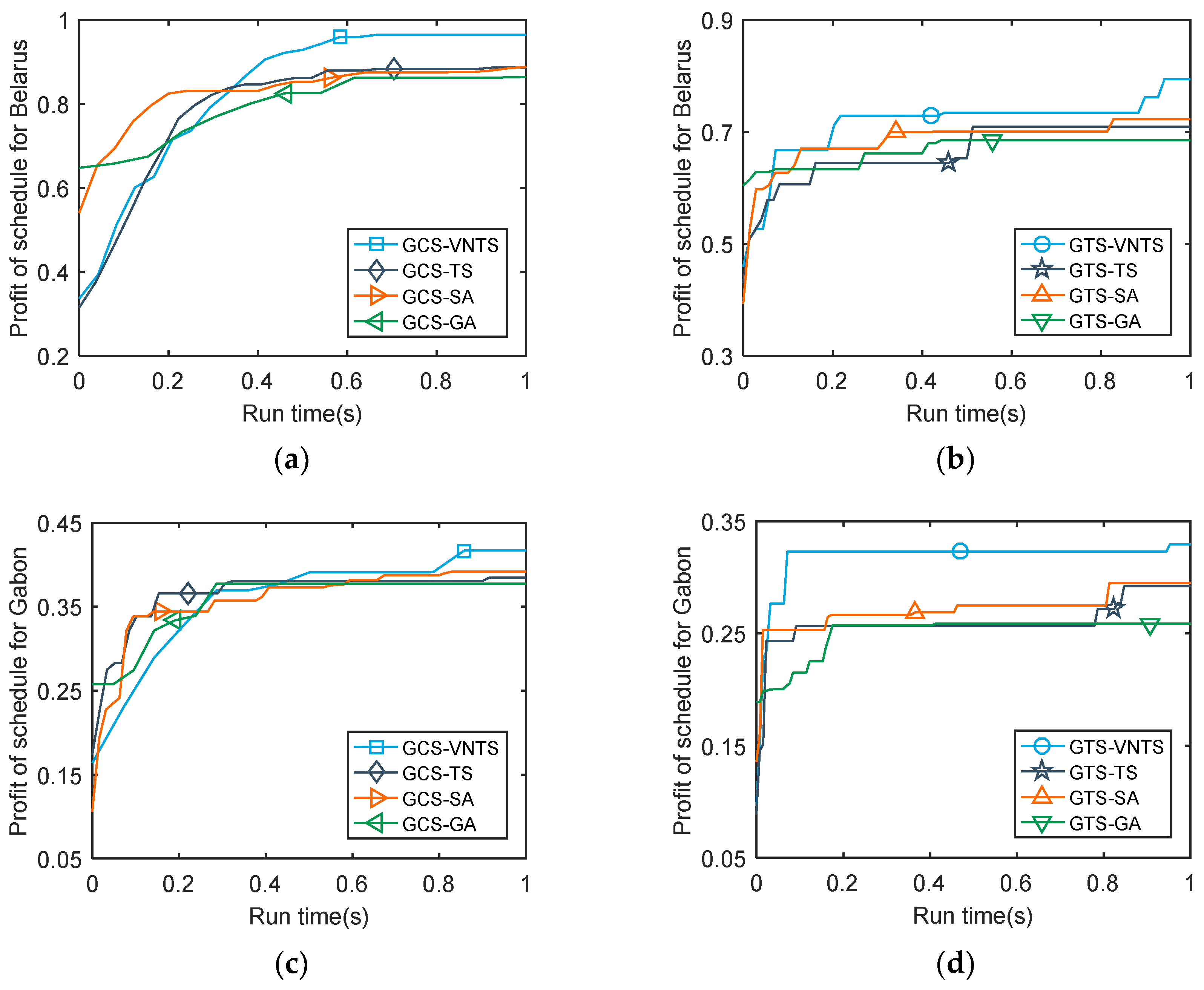
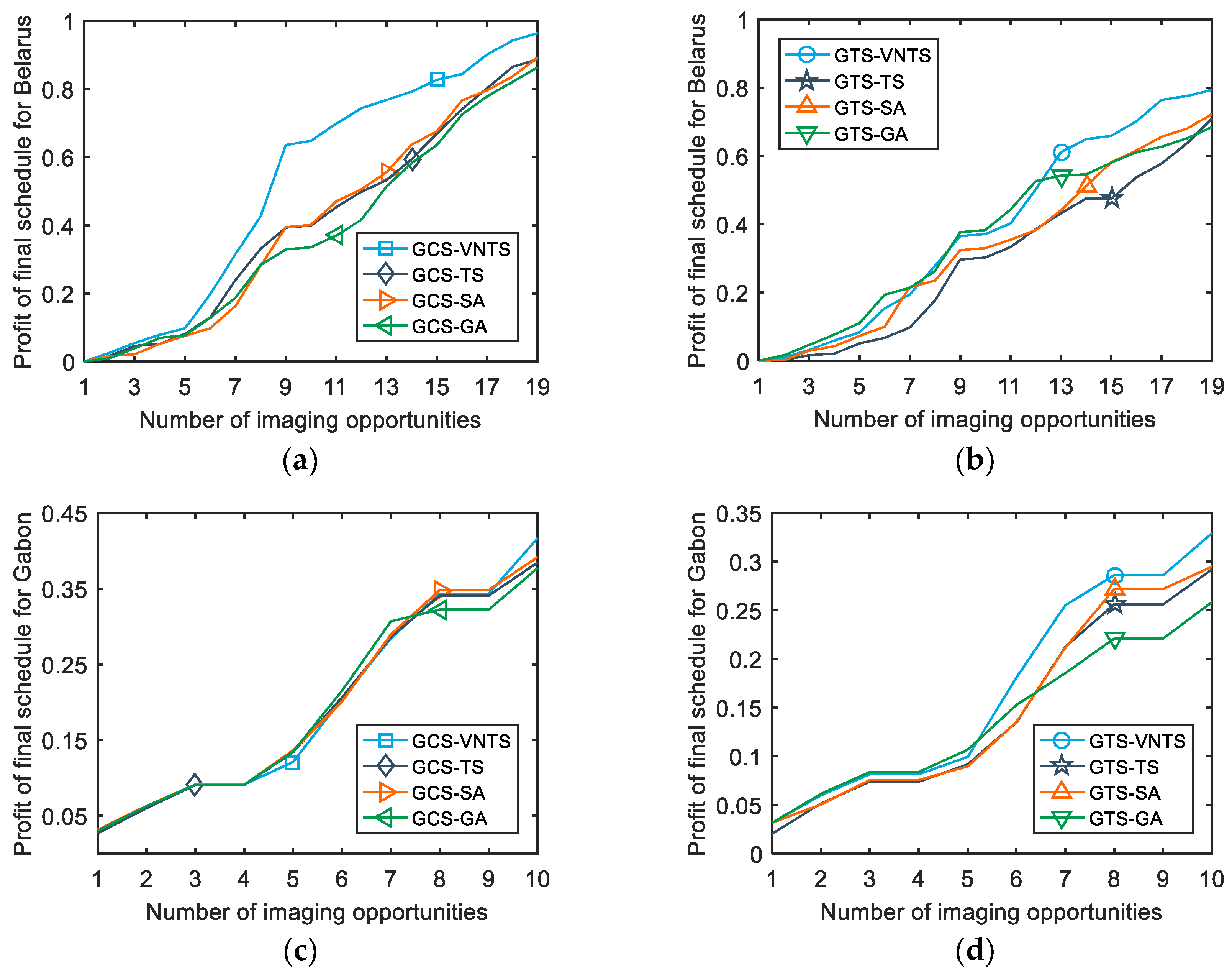
3.2. Comparison Results with Other Methods
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, S.; Park, S.-Y.; Kim, J.; Ka, M.-H.; Song, Y. Mission Design and Orbit-Attitude Control Algorithms Development of Multistatic SAR Satellites for Very-High-Resolution Stripmap Imaging. Aerospace 2023, 10, 33. [Google Scholar] [CrossRef]
- Sarno, S.; Iervolino, M.; Fasano, G. An Adaptive Approach for Impulsive Formation Maintenance Relevant to Distributed SAR Missions. Aerospace 2022, 9, 142. [Google Scholar] [CrossRef]
- Havivi, S.; Schvartzman, I.; Maman, S.; Rotman, S.; Blumberg, D. Combining TerraSAR-X and Landsat Images for Emergency Response in Urban Environments. Remote Sens. 2018, 10, 802. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Wang, Y.; Liu, H. Ship classification in medium-resolution SAR images via densely connected triplet CNNs integrating Fisher discrimination regularized metric learning. IEEE Trans. Geosci. Remote Sens. 2020, 59, 3022–3039. [Google Scholar] [CrossRef]
- Rydlewski, J.; Rajabi, Z.; Tariq, M.; Muttil, N.; Sidiqui, P.; Shah, A.; Khan, N.; Irshad, M.; Alam, A.; Butt, T.; et al. Identification of Embodied Environmental Attributes of Construction in Metropolitan and Growth Region of Melbourne, Australia to Support Urban Planning. Sustainability 2022, 14, 8401. [Google Scholar] [CrossRef]
- Sun, C.; Zhang, H.; Ge, J.; Wang, C.; Li, L.; Xu, L. Rice Mapping in a Subtropical Hilly Region Based on Sentinel-1 Time Series 412 Feature Analysis and the Dual Branch BiLSTM Model. Remote Sens. 2022, 14, 3213. [Google Scholar] [CrossRef]
- Di Martino, G.; Iodice, A.; Hedgehog, D.; Ruello, G. A novel approach for disaster monitoring: Fractal models and tools. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1559–1570. [Google Scholar] [CrossRef]
- Wu, Z.; Li, L.; Li, Y.; Gao, Y. Simulation of Two-Satellite Reconnaissance System with Intelligent Decision Based on Object Detection. In Proceedings of the Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Ji, H.; Huang, D. A mission planning method for multi-satellite wide area observation. Int. J. Adv. Rob. Syst. 2019, 16, 1729881419890715. [Google Scholar] [CrossRef]
- Karpiński, M. Vertex 2-coloring without monochromatic cycles of fixed size is NP-complete. Theor. Comput. Sci. 2017, 659, 88–94. [Google Scholar] [CrossRef]
- Song, J.S.; Xiao, L.; Zhang, H.; Zipkin, P. Optimal policies for a dual-sourcing inventory problem with endogenous stochastic lead times. Oper. Res. 2017, 65, 379–395. [Google Scholar] [CrossRef] [Green Version]
- Jarrah, A.I.; Qi, X.; Bard, J.F. The destination-loader-door assignment problem for automated package sorting centers. Transp. Sci. 2014, 50, 1314–1336. [Google Scholar] [CrossRef] [Green Version]
- Furini, F.; Iori, M.; Martello, S.; Yagiura, M. Heuristic and exact algorithms for the interval min–max regret knapsack problem. INFORMS J. Comput. 2015, 27, 392–405. [Google Scholar] [CrossRef] [Green Version]
- Janiak, A.; Kovalyov, M.Y.; Lichtenstein, M. On a single machine-scheduling problem with separated position and resource effects. Optimization 2015, 64, 909–911. [Google Scholar] [CrossRef]
- Xu, Y.; Liu, X.; He, R.; Chen, Y. Multi-satellite scheduling framework and algorithm for very large area observation. Acta. Astronaut. 2020, 167, 93–107. [Google Scholar] [CrossRef]
- Horiyama, T.; Ito, T.; Nakatsuka, K.; Suzuki, A.; Uehara, R. Complexity of Tiling a Polygon with Trominoes or Bars. Discrete. Comput. Geom. 2017, 58, 686–704. [Google Scholar] [CrossRef]
- Abbott, H.L.; Katchalski, M. Covering squares with squares. Discrete. Comput. Geom. 2000, 24, 151–170. [Google Scholar] [CrossRef]
- Soifer, A. Covering a square of side n + ε with unit squares. J. Comb. Theory. A. 2006, 113, 380–383. [Google Scholar] [CrossRef] [Green Version]
- Januszewski, J. A Note on Covering a Square of Side Length 2 + ∊ with Unit Squares. Am. Math. Mon. 2009, 116, 174–178. [Google Scholar] [CrossRef]
- Acharyya, A.; Nandy, S.C.; Pandit, S.; Roy, S. Covering segments with unit squares. Comp. Geom-Theor. Appl. 2019, 79, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Kumar, V.S.A.; Ramesh, H. Covering rectilinear polygons with axis -parallel rectangles. SIAM J. Comput. 2003, 32, 1509–1541. [Google Scholar] [CrossRef] [Green Version]
- Song, D.; van der Stappen, A.F.; Goldberg, K. Exact algorithms for single frame selection on multiaxis Satellites. IEEE T. Autom. Sci. Eng. 2006, 3, 16–28. [Google Scholar] [CrossRef]
- Song, D.; Goldberg, K.Y. Approximate Algorithms for a Collaboratively Controlled Robotic Camera. IEEE T. Robot. 2007, 23, 1061–1070. [Google Scholar] [CrossRef] [Green Version]
- Bansal, M.; Kianfar, K. Planar Maximum Coverage Location Problem with Partial Coverage and Rectangular Demand and Service Zones. INFORMS J. Comput. 2017, 29, 152–169. [Google Scholar] [CrossRef] [Green Version]
- Bensana, E.; Lemaitre, M.; Verfaillie, G. Earth observation satellite management. Constraints 1999, 4, 293–299. [Google Scholar] [CrossRef]
- Vasquez, M.; Hao, J.K. A “logic-constrained” knapsack formulation and a tabu algorithm for the daily photograph scheduling of an earth observation satellite. Comput. Optim. Appl. 2001, 20, 137–157. [Google Scholar] [CrossRef]
- Vasquez, M.; Hao, J.K. Upper bounds for the SPOT 5 daily photograph scheduling problem. J. Comb. Optim. 2003, 7, 87–103. [Google Scholar] [CrossRef] [Green Version]
- Gabrel, V. Strengthened 0–1 linear formulation for the daily satellite mission planning. J. Comb. Optim. 2006, 11, 341–346. [Google Scholar] [CrossRef]
- Gabrel, V.; Moulet, A.; Murat, C.; Paschos, V.T. A new single model and derived algorithms for the satellite shot planning problem using graph theory concepts. Ann. Oper. Res. 1997, 69, 115–134. [Google Scholar] [CrossRef]
- Gabrel, V.; Vanderpooten, D. Enumeration and interactive selection of efficient paths in a multiple criteria graph for scheduling an earth observing satellite. Eur. J. Oper. Res. 2002, 139, 533–542. [Google Scholar] [CrossRef]
- Gabrel, V.; Murat, C. Operations Research in Space and Air; Springer: Dordrecht, The Netherlands, 2003; pp. 103–122. [Google Scholar]
- Wu, G.; Liu, J.; Ma, M.; Qiu, D. A two-phase scheduling method with the consideration of task clustering for earth observing satellites. Comput. Oper. Res. 2013, 40, 1884–1894. [Google Scholar] [CrossRef]
- Liu, X.; Bai, B.; Chen, Y.; Feng, Y. Multi satellites scheduling algorithm based on task merging mechanism. Appl. Math. Comput. 2014, 230, 687–700. [Google Scholar]
- Wang, J.; Zhu, X.; Yang, L.T.; Zhu, J.; Ma, M. Towards dynamic real-time scheduling for multiple earth observation satellites. J. Comput. Syst. Sci. 2015, 81, 110–124. [Google Scholar] [CrossRef]
- Lemaıître, M.; Verfaillie, G.; Jouhaud, F.; Lachiver, J.M.; Bataille, N. Selecting and scheduling observations of agile satellites. Aerosp. Sci. Technol. 2002, 6, 367–381. [Google Scholar] [CrossRef]
- Cordeau, J.F.; Laporte, G. Maximizing the value of an earth observation satellite orbit. J. Oper. Res. Soc. 2005, 56, 962–968. [Google Scholar] [CrossRef]
- Bianchessi, N.; Cordeau, J.F.; Desrosiers, J.; Laporte, G.; Raymond, V. A heuristic for the multi-satellite, multi-orbit and multi-user management of earth observation satellites. Eur. J. Oper. Res. 2007, 177, 750–762. [Google Scholar] [CrossRef]
- Habet, D.; Vasquez, M.; Vimont, Y. Bounding the optimum for the problem of scheduling the photographs of an Agile Earth Observing Satellite. Comput. Optim. Appl. 2010, 47, 307–333. [Google Scholar] [CrossRef]
- Tangpattanakul, P.; Jozefowiez, N.; Lopez, P. Recent Advances in Computational Optimization; Springer: Cham, Switzerland, 2015; pp. 143–160. [Google Scholar]
- Tangpattanakul, P.; Jozefowiez, N.; Lopez, P. A multi-objective local search heuristic for scheduling Earth observations taken by an agile satellite. Eur. J. Oper. Res. 2015, 245, 542–554. [Google Scholar] [CrossRef] [Green Version]
- Bianchessi, N.; Righini, G. Planning and scheduling algorithms for the COSMO-SkyMed constellation. Aerosp. Sci. Technol. 2008, 12, 535–544. [Google Scholar] [CrossRef]
- Wang, P.; Reinelt, G.; Gao, P.; Tan, Y. A model, a heuristic and a decision support system to solve the scheduling problem of an earth observing satellite constellation. Comput. Ind. Eng. 2011, 61, 322–335. [Google Scholar] [CrossRef]
- Beasley, J.E.; Chu, P.C. A genetic algorithm for the set covering problem. Eur. J. Oper. Res. 1996, 94, 392–404. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Hu, H. A Simulated Annealing Algorithm with Tabu List for the Multi-Satellite Downlink Schedule Problem Considering Waiting Time. Aerospace 2022, 9, 235. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | L-SAR (01A,01B) | GAOFEN (3,3-02,3-03) |
|---|---|---|
| Orbit height (km) | 607 | 755 |
| Inclination (°) | 97.83 | 98.43 |
| Range of incidence angle (°) | 10~60 | 19~50 |
| Resolution (m) | 3 | 5 |
| Maximum imaging duration of a single orbit (min) | 7.5 | 10 |
| Swath width (km) | 50 | 50 |
| Name | Belarus | Gabon |
|---|---|---|
| Maximum longitude (°) | 32.74 | 15.53 |
| Minimum longitude (°) | 23.16 | 8.70 |
| Maximum latitude (°) | 56.17 | 2.33 |
| Minimum latitude (°) | 51.24 | −3.93 |
| Area(km2) | 207,721 | 260,547 |
| Name | Belarus | Gabon |
|---|---|---|
| L-SAR 01A | 4 | 2 |
| L-SAR 01B | 4 | 2 |
| GAOFEN 3 | 4 | 2 |
| GAOFEN 3-02 | 4 | 2 |
| GAOFEN 3-03 | 3 | 2 |
| Strategy | Algorithm | Profit of Belarus | Profit of Gabon |
|---|---|---|---|
| GCS | VNTS | 0.9644 | 0.4168 |
| TS | 0.8872 | 0.3846 | |
| SA | 0.8933 | 0.3918 | |
| GA | 0.8639 | 0.3773 | |
| GTS | VNTS | 0.7940 | 0.3292 |
| TS | 0.6800 | 0.2921 | |
| SA | 0.7094 | 0.2949 | |
| GA | 0.6137 | 0.2586 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Q.; Yue, H.; Liu, D.; Jia, X. A Scheduling Method of Using Multiple SAR Satellites to Observe a Large Area. Sensors 2023, 23, 3353. https://doi.org/10.3390/s23063353
Zheng Q, Yue H, Liu D, Jia X. A Scheduling Method of Using Multiple SAR Satellites to Observe a Large Area. Sensors. 2023; 23(6):3353. https://doi.org/10.3390/s23063353
Chicago/Turabian StyleZheng, Qicun, Haixia Yue, Dacheng Liu, and Xiaoxue Jia. 2023. "A Scheduling Method of Using Multiple SAR Satellites to Observe a Large Area" Sensors 23, no. 6: 3353. https://doi.org/10.3390/s23063353
APA StyleZheng, Q., Yue, H., Liu, D., & Jia, X. (2023). A Scheduling Method of Using Multiple SAR Satellites to Observe a Large Area. Sensors, 23(6), 3353. https://doi.org/10.3390/s23063353