
Research on the Total Channel Capacities Pertaining to Two Coverage Layouts for Three-Dimensional, UAV-Assisted Ad Hoc Networks



Abstract
:1. Introduction
1.1. Related Works
1.2. Motivations, Contributions, and Limitations
- A novel MD-based total channel capacity estimation method is designed for exploring the total channel capacity of various coverage layouts of a UAV-assisted ad hoc network.
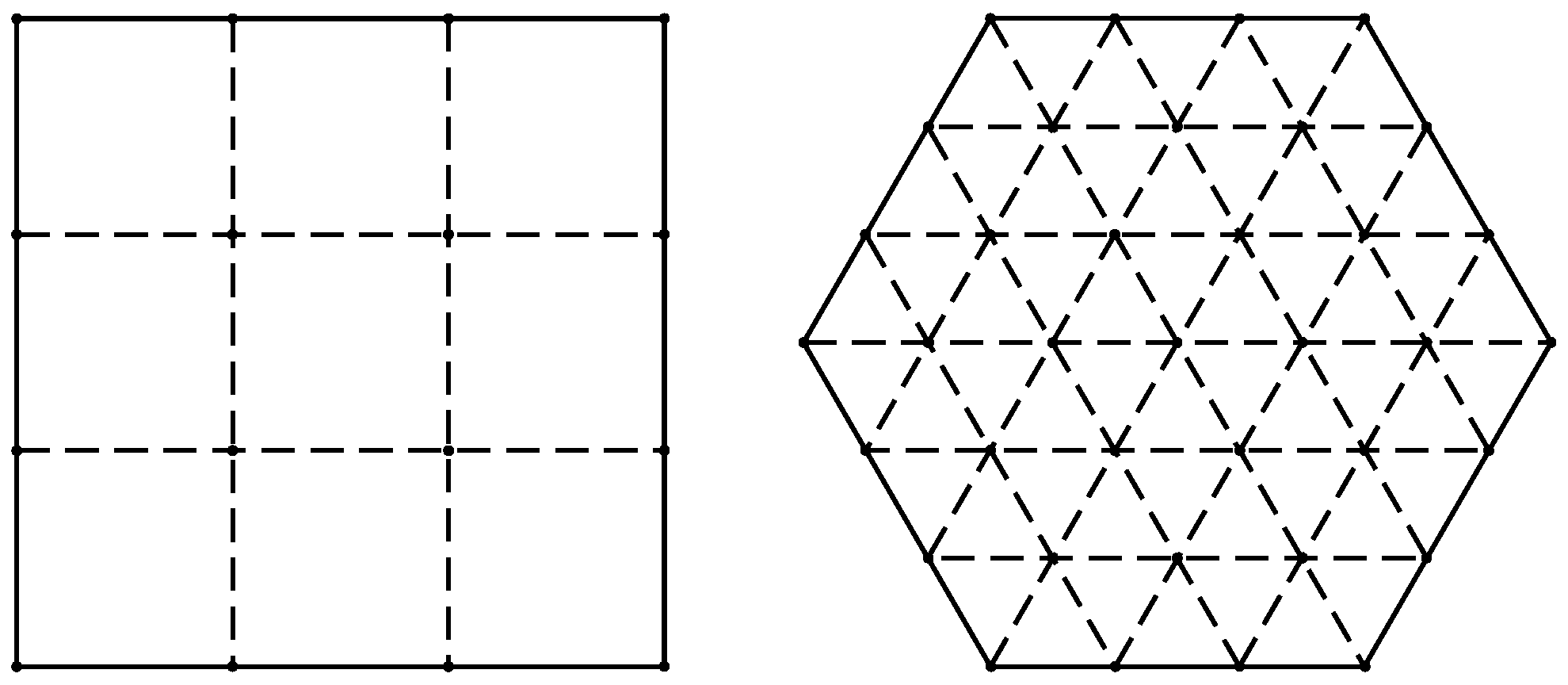
- A new polygon division strategy is designed to reduce the computational complexity required for the calculation of MDs.
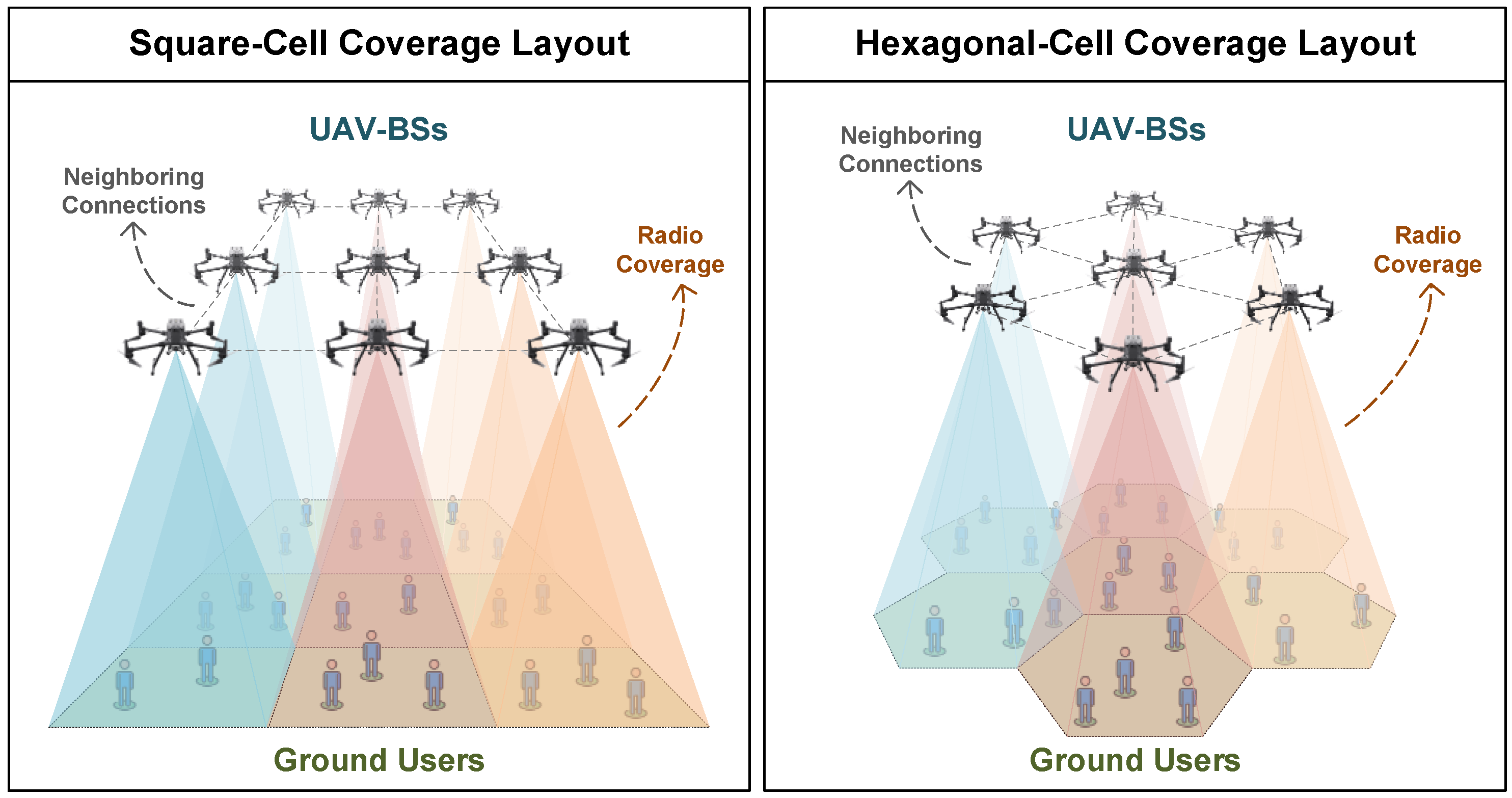
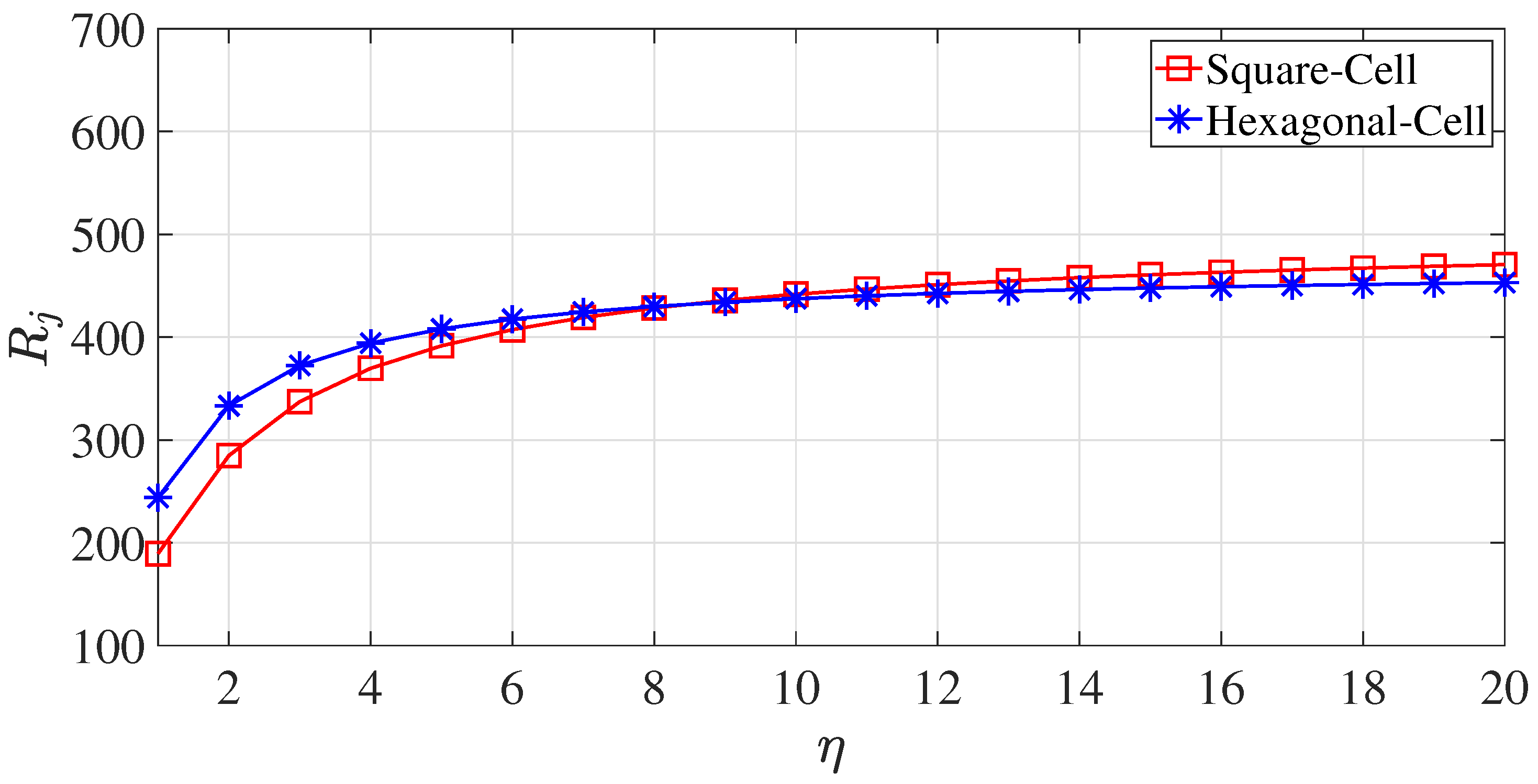
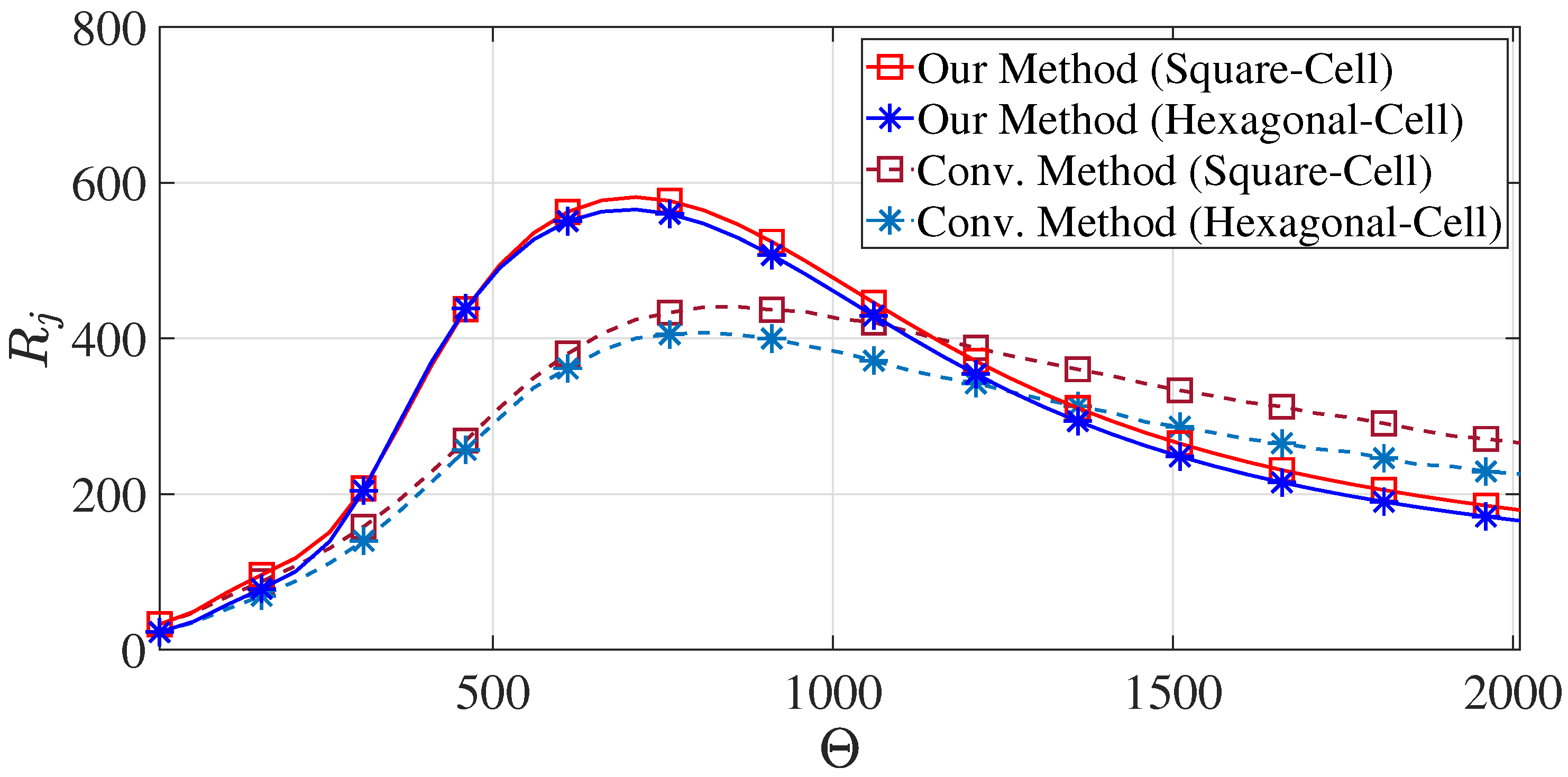
- We show that the square cell coverage layout can lead to a larger total channel capacity than the hexagonal cell coverage layout for UAV-assisted ad hoc networks.
2. Problem Statement and System Model
2.1. Network Topology
2.2. Path Loss Model
2.3. Total Channel Capacity
3. Proposed Computationally Efficient Channel Capacity Estimation Scheme
3.1. Mean Distance
3.2. Total Channel Capacity Estimation
4. Simulations
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Utsav, A.; Abhishek, A.; Suraj, P.; Badhai, R.K. An IoT Based UAV Network For Military Applications. In Proceedings of the 2021 Sixth International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 122–125. [Google Scholar] [CrossRef]
- Nokia Drone Networks|Nokia Digital Automation Cloud. Available online: https://www.dac.nokia.com/applications/nokia-drone-networks/ (accessed on 23 March 2023).
- Shahzadi, R.; Ali, M.; Naeem, M. UAV Placement and Resource Management in Public Safety Networks: An Overview. In Intelligent Unmanned Air Vehicles Communications for Public Safety Networks; Kaleem, Z., Ahmad, I., Duong, T.Q., Eds.; Unmanned System Technologies; Springer Nature: Singapore, 2022; pp. 19–49. [Google Scholar] [CrossRef]
- Han, S.I. Survey on UAV Deployment and Trajectory in Wireless Communication Networks: Applications and Challenges. Information 2022, 13, 389. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Xu, J.; Zeng, Y.; Ng, D.W.K.; Al-Dhahir, N.; Schober, R.; Swindlehurst, A.L. A Comprehensive Overview on 5G-and-Beyond Networks with UAVs: From Communications to Sensing and Intelligence. IEEE J. Sel. Areas Commun. 2021, 39, 2912–2945. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Tang, M.; Zhang, L.; Huo, Z.; Shu, L. A Survey of Using Swarm Intelligence Algorithms in IoT. Sensors 2020, 20, 1420. [Google Scholar] [CrossRef] [Green Version]
- Gul, O.M.; Erkmen, A.M.; Kantarci, B. UAV-Driven Sustainable and Quality-Aware Data Collection in Robotic Wireless Sensor Networks. IEEE Internet Things J. 2022, 9, 25150–25164. [Google Scholar] [CrossRef]
- Alzenad, M.; El-Keyi, A.; Lagum, F.; Yanikomeroglu, H. 3-D Placement of an Unmanned Aerial Vehicle Base Station (UAV-BS) for Energy-Efficient Maximal Coverage. IEEE Wirel. Commun. Lett. 2017, 6, 434–437. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Savkin, A.V. Deployment of Heterogeneous UAV Base Stations for Optimal Quality of Coverage. IEEE Internet Things J. 2022, 9, 16429–16437. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, D.; Cai, S.; Wu, H.C. Optimal and Greedy Algorithms for the One-Dimensional RSU Deployment Problem with New Model. IEEE Trans. Veh. Technol. 2018, 67, 7643–7657. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, Q.; Liu, X.; Liu, Y.; Chen, Y. Three-Dimension Trajectory Design for Multi-UAV Wireless Network with Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2021, 70, 600–612. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Pan, C.; Nallanathan, A. Throughput Maximization for Full-Duplex UAV Aided Small Cell Wireless Systems. IEEE Wirel. Commun. Lett. 2020, 9, 475–479. [Google Scholar] [CrossRef] [Green Version]
- Valiulahi, I.; Masouros, C. Multi-UAV Deployment for Throughput Maximization in the Presence of Co-Channel Interference. IEEE Internet Things J. 2021, 8, 3605–3618. [Google Scholar] [CrossRef]
- Liu, N.; Luo, C.; Cao, J.; Hong, Y.; Chen, Z. Trajectory Optimization of Laser-Charged UAVs for Charging Wireless Rechargeable Sensor Networks. Sensors 2022, 22, 9215. [Google Scholar] [CrossRef] [PubMed]
- Jia, G.; Li, C.; Li, M. Energy-Efficient Trajectory Planning for Smart Sensing in IoT Networks Using Quadrotor UAVs. Sensors 2022, 22, 8729. [Google Scholar] [CrossRef] [PubMed]
- Fu, S.; Yin, L.; Jiang, C.; Jamalipour, A. An Energy-Efficient Intelligent Framework of UAV-Enhanced Vehicular Networks: Open Problems and a Case Study. IEEE Veh. Technol. Mag. 2022, 17, 94–102. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, H.; He, Y. Deployment Optimization of UAV-Aided Networks Through a Dynamic Tunable Model. IEEE Commun. Lett. 2021, 25, 2348–2352. [Google Scholar] [CrossRef]
- Lim, N.H.Z.; Lee, Y.L.; Tham, M.L.; Chang, Y.C.; Sim, A.G.H.; Qin, D. Coverage Optimization for UAV Base Stations Using Simulated Annealing. In Proceedings of the 2021 IEEE 15th Malaysia International Conference on Communication (MICC), Online, 1–2 December 2021; pp. 43–48. [Google Scholar] [CrossRef]
- Yu, G.; Ding, X.; Liu, S. Joint Resource Management and Trajectory Optimization for UAV-Enabled Maritime Network. Sensors 2022, 22, 9763. [Google Scholar] [CrossRef]
- Ma, D.; Feng, Z.; Qin, Y. Optimization of Throughput Maximization of UAV as Mobile Relay Communication System. In Proceedings of the 2020 International Conference on Virtual Reality and Intelligent Systems (ICVRIS), Zhangjiajie, China, 18–19 July 2020; pp. 798–801. [Google Scholar] [CrossRef]
- Sayeed, M.A.; Kumar, R.; Sharma, V.; Sayeed, M.A. Efficient Deployment with Throughput Maximization for UAVs Communication Networks. Sensors 2020, 20, 6680. [Google Scholar] [CrossRef]
- Yan, X.; Lin, Y.; Wu, H.C.; Wang, Q.; Zhu, S. Novel Robust Dynamic Distributed Drone-Deployment Strategy for Channel-Capacity Optimization for Three-Dimensional UAV-Aided Ad Hoc Networks. IEEE Internet Things J. 2023, in press. [CrossRef]
- An, Q.; Pan, Y.; Han, H.; Hu, H. Secrecy Capacity Maximization of UAV-Enabled Relaying Systems with 3D Trajectory Design and Resource Allocation. Sensors 2022, 22, 4519. [Google Scholar] [CrossRef] [PubMed]
- Lee, W.; Jeon, Y.; Kim, T.; Kim, Y.I. Deep Reinforcement Learning for UAV Trajectory Design Considering Mobile Ground Users. Sensors 2021, 21, 8239. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.; Hao, S.; Yang, W.; Wang, P.; Wang, L.; Wu, G.; Zhang, Q. Maximizing Energy Efficiency of Period-Area Coverage with a UAV for Wireless Rechargeable Sensor Networks. IEEE/ACM Trans. Netw. 2022, in press. [Google Scholar] [CrossRef]
- Andrews, J.G.; Baccelli, F.; Ganti, R.K. A Tractable Approach to Coverage and Rate in Cellular Networks. IEEE Trans. Commun. 2011, 59, 3122–3134. [Google Scholar] [CrossRef] [Green Version]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef] [Green Version]
- Ghanavi, R.; Kalantari, E.; Sabbaghian, M.; Yanikomeroglu, H.; Yongacoglu, A. Efficient 3D aerial base station placement considering users mobility by reinforcement learning. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Tran, H.D.; Chatzinotas, S.; Ottersten, B. Throughput Maximization for Backscatter- and Cache-assisted Wireless Powered UAV Technology. IEEE Trans. Veh. Technol. 2022, 71, 5187–5202. [Google Scholar] [CrossRef]
- Bhowmick, A.; Roy, S.D.; Kundu, S. Throughput Maximization of a UAV Assisted CR Network with NOMA-Based Communication and Energy-Harvesting. IEEE Trans. Veh. Technol. 2022, 71, 362–374. [Google Scholar] [CrossRef]
- Kalantari, E.; Bor-Yaliniz, I.; Yongacoglu, A.; Yanikomeroglu, H. User association and bandwidth allocation for terrestrial and aerial base stations with backhaul considerations. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Dai, H.; Zhang, H.; Hua, M.; Li, C.; Huang, Y.; Wang, B. How to Deploy Multiple UAVs for Providing Communication Service in an Unknown Region? IEEE Wirel. Commun. Lett. 2019, 8, 1276–1279. [Google Scholar] [CrossRef]
- Floating-Point Math Speed vs Precision. Available online: http://nicolas.limare.net/pro/notes/2014/12/16_math_speed/ (accessed on 23 March 2023).
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar] [CrossRef]
- GPS.Gov: GPS Accuracy. Available online: https://www.gps.gov/systems/gps/performance/accuracy/ (accessed on 23 March 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Ref. | Method | Technique(s) | Advantage(s) | Limitation(s) |
|---|---|---|---|---|---|
| 1 | [20] | semi-progressive UAV deployment scheme | ring placement algorithm and position adjustment algorithm | reducing overlapping interference while maintaining effective communication coverage | highly dependent on terrestrial MBSs |
| 2 | [21] | simulated annealing-based coverage optimization algorithm | simulated annealing | maximizing the coverage of multiple UAV-BSs while avoiding collision | battery constraints were not considered |
| 3 | [22] | joint user association, power allocation, and UAV trajectory optimization algorithm | successive convex approximation and interior point techniques | maximizing the minimum average throughput by jointly optimizing the user association, power allocation, and UAV trajectory | various maritime environments were not considered |
| 4 | [23] | particle swarm optimization-based throughput optimization | particle swarm optimization algorithm | maximizing the system throughput by adjusting UAV’s height | horizontal mobility of the UAV was ignored |
| 5 | [24] | UAV repurposing-based approach for throughput maximization, delay, and packet loss minimization | graph neural networks | maximizing the throughput while the approach can accommodate any number of aerial nodes | battery constraints were not considered |
| 6 | [25] | Gibbs sampling distributed algorithm | Gibbs sampling and distributed optimization | maximizing the total channel capacity by dynamically optimizing the UAV’s location | battery constraints were not considered |
| 7 | [26] | successive convex approximation–alternative iterative optimization algorithm | successive convex approximation | maximizing the secrecy capacity by jointly optimizing UAV’s location, power allocation, and bandwidth allocation | energy consumption and throughput were not compromised |
| 8 | [27] | deep Q network-based learning model, enabling the optimal deployment of a UAV-BS | deep Q network | maximizing the mean opinion score for ground users by optimizing the UAV trajectory | training for mobile ground users was not considered |
| 9 | [28] | heuristic hexagon-based scheduling algorithm | greedy algorithm | maximizing the energy efficiency by optimizing UAV trajectory while decomposing the network into hexagons | real-time scheduling was not considered |
| Arithmetic Operation | Equation (13) | Equation (24) |
|---|---|---|
| Sum | 19 | |
| Product | 31 | |
| Exponential | 4 | |
| Logarithm | 4 | |
| Inverse trigonometric | 2 |
| Method | Positioning Accuracy | ||
|---|---|---|---|
| 5 m | 10 m | 100 m | |
| Our Method | |||
| Conventional Method | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Zhu, S.; Wang, Q.; Wu, H.-C. Research on the Total Channel Capacities Pertaining to Two Coverage Layouts for Three-Dimensional, UAV-Assisted Ad Hoc Networks. Sensors 2023, 23, 3504. https://doi.org/10.3390/s23073504
Yan X, Zhu S, Wang Q, Wu H-C. Research on the Total Channel Capacities Pertaining to Two Coverage Layouts for Three-Dimensional, UAV-Assisted Ad Hoc Networks. Sensors. 2023; 23(7):3504. https://doi.org/10.3390/s23073504
Chicago/Turabian StyleYan, Xiao, Shenglong Zhu, Qian Wang, and Hsiao-Chun Wu. 2023. "Research on the Total Channel Capacities Pertaining to Two Coverage Layouts for Three-Dimensional, UAV-Assisted Ad Hoc Networks" Sensors 23, no. 7: 3504. https://doi.org/10.3390/s23073504
APA StyleYan, X., Zhu, S., Wang, Q., & Wu, H. -C. (2023). Research on the Total Channel Capacities Pertaining to Two Coverage Layouts for Three-Dimensional, UAV-Assisted Ad Hoc Networks. Sensors, 23(7), 3504. https://doi.org/10.3390/s23073504