

Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait
 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
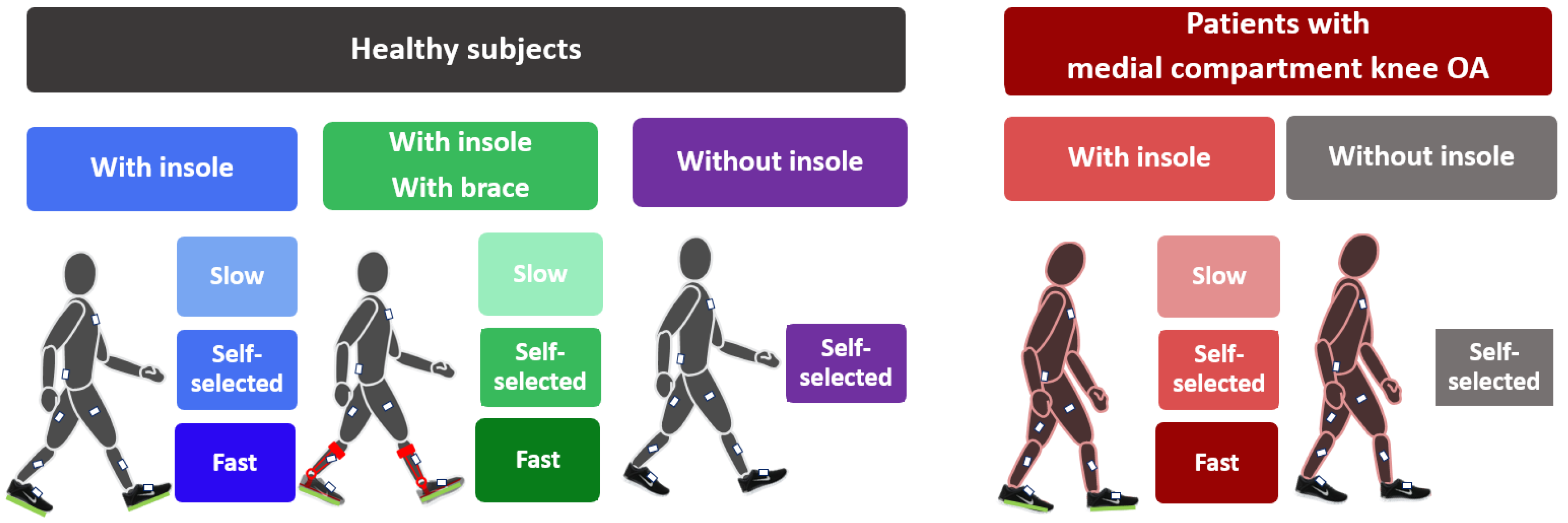
2.1. Experimental Protocol
2.2. I2S Pairing
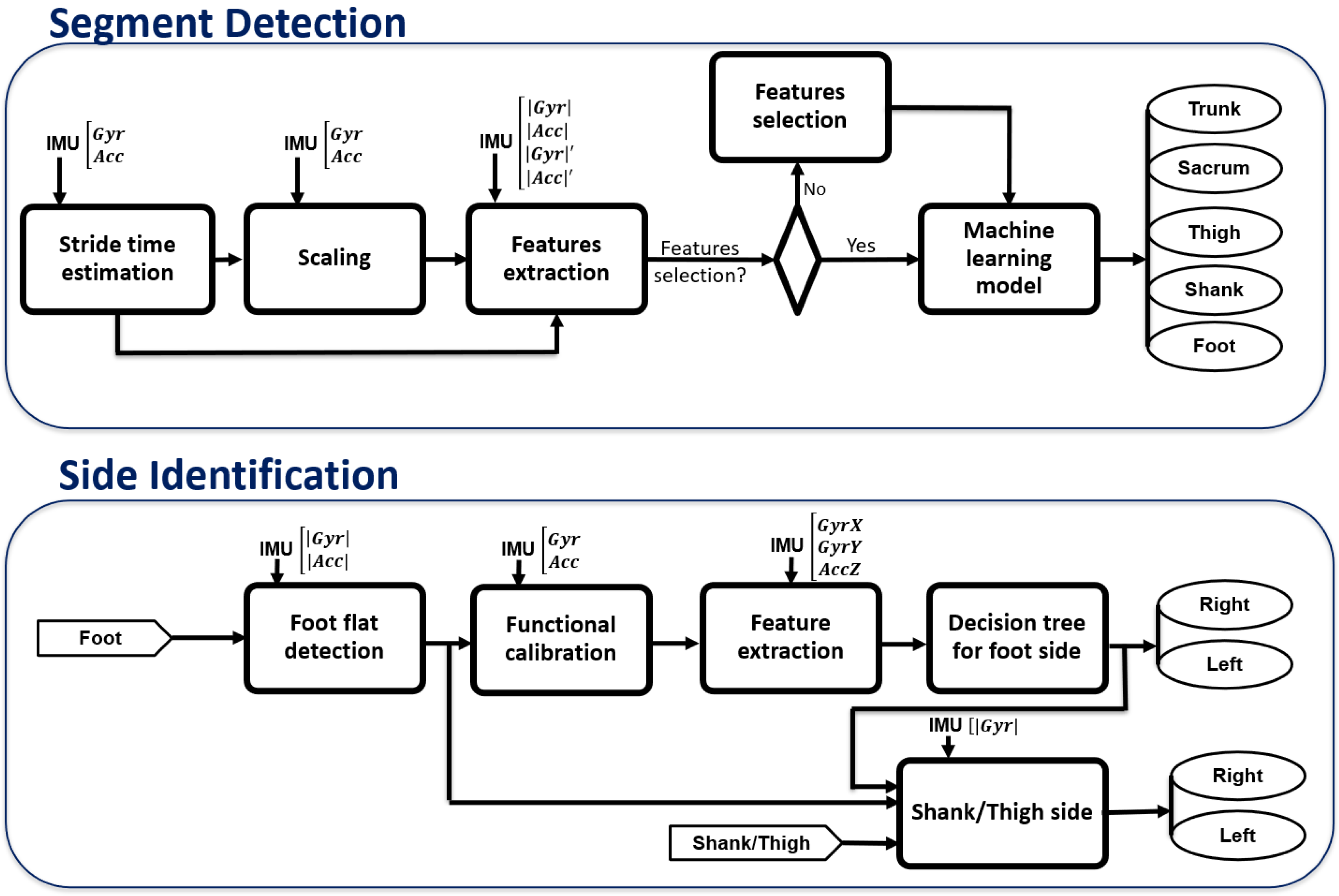
2.2.1. Automatic Segment Detection
2.2.2. Side Identification of Lower Limb Segments
- Foot flat detection: to approximately detect the period that the foot is flat, find the periods that |Gyr| < 5 deg/s for at least 15% of the stride time (in fast walking, the foot flat period can decrease up to 15% of the stride time).
- Functional calibration
- Rotate the signal to align Y-axis with gravity during foot flat.
- Find the mediolateral axis of the foot by implementing a PCA on the rotated signal.
- Rotate the signal around the new Y-axis to align Z-axis with foot mediolateral axis.
- Check the sign of Gyrz after the foot flat; if positive, rotate the signals by 180 degrees around Y-axis to have the data in anatomical frame with the Z-axis pointing from left to right for both feet.
- Feature extraction
- Find the index of the first peak of |Gyr| after foot flat.
- At this index, extract the value of Gyrx, Gyry, and Accz.
- Take the median of these three features for several gait cycles in each walking bout.
- Decision tree for side identification of the foot sensor.
2.3. Validation
3. Results
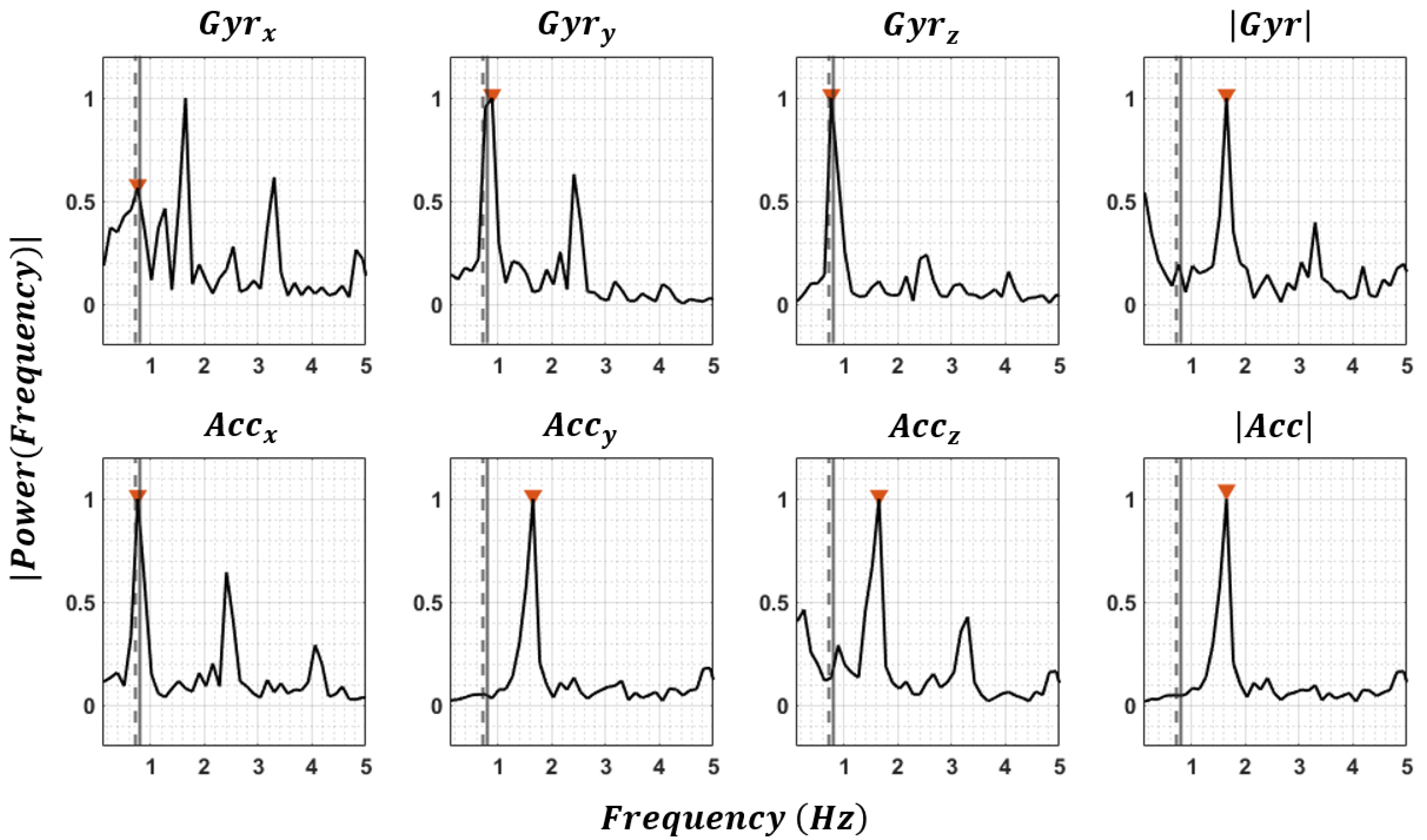
3.1. Stride-time Estimation
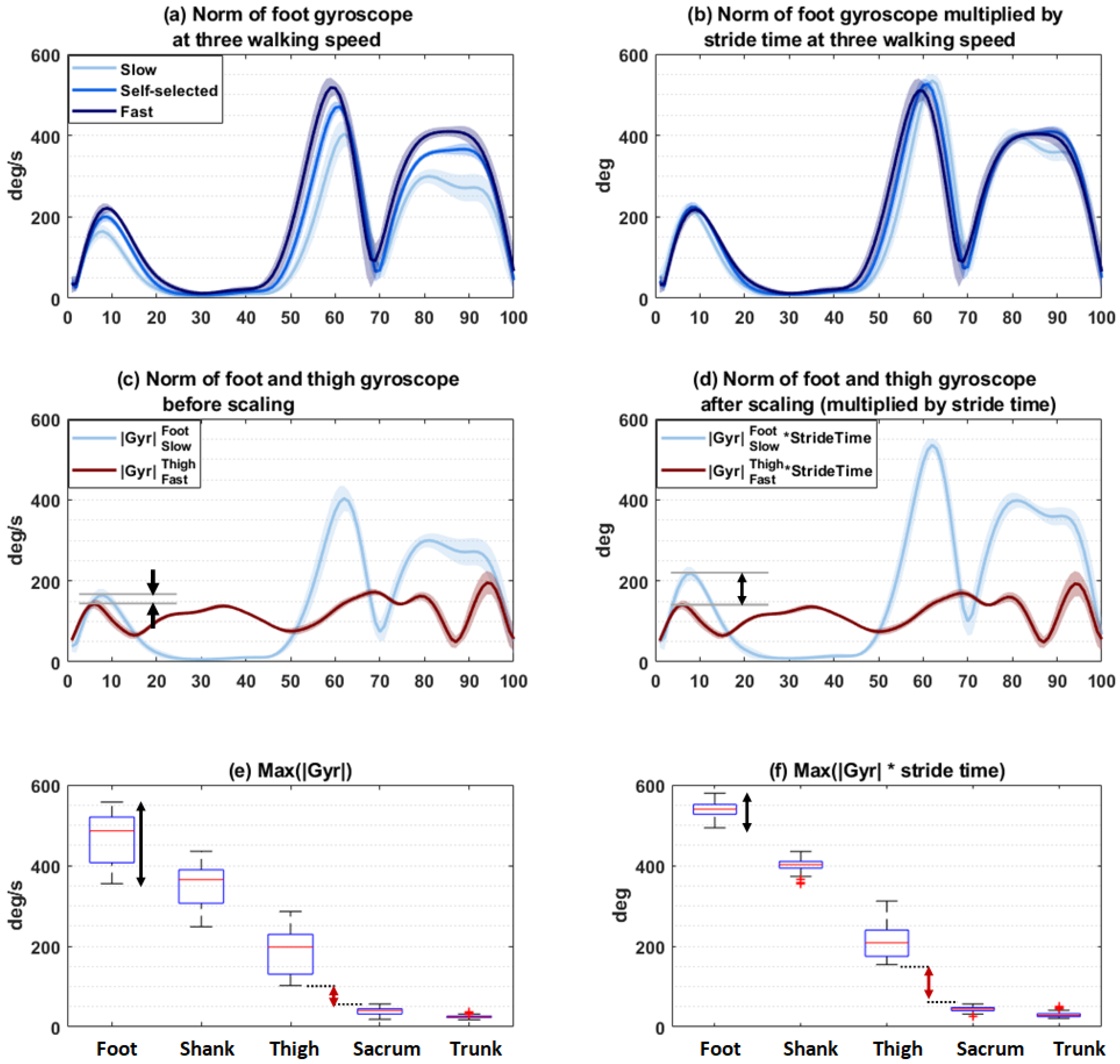
3.2. Impact of Stride Time Scaling
3.3. Segment Detection
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D Gait Assessment in Young and Elderly Subjects Using Foot-Worn Inertial Sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef] [PubMed]
- Milosevic, B.; Leardini, A.; Farella, E. Kinect and Wearable Inertial Sensors for Motor Rehabilitation Programs at Home: State of the Art and an Experimental Comparison. Biomed. Eng. Online 2020, 19, 25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, Y.J.; Wei, M.Y.; Chen, Y.J. Multiple Inertial Measurement Unit Combination and Location for Recognizing General, Fatigue, and Simulated-Fatigue Gait. Gait Posture 2022, 96, 330–337. [Google Scholar] [CrossRef]
- Guaitolini, M.; Truppa, L.; Sabatini, A.M.; Mannini, A.; Castagna, C. Sport-Induced Fatigue Detection in Gait Parameters Using Inertial Sensors and Support Vector Machines. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 170–174. [Google Scholar]
- Kamstra, H.; Wilmes, E.; Van Der Helm, F.C.T. Quantification of Error Sources with Inertial Measurement. Sensors 2022, 22, 9765. [Google Scholar] [CrossRef] [PubMed]
- Baghdadi, A.; Cavuoto, L.A.; Jones-Farmer, A.; Rigdon, S.E.; Esfahani, E.T.; Megahed, F.M. Monitoring Worker Fatigue Using Wearable Devices: A Case Study to Detect Changes in Gait Parameters. J. Qual. Technol. 2019, 53, 47–71. [Google Scholar] [CrossRef]
- Baghdadi, A.; Megahed, F.M.; Esfahani, E.T.; Cavuoto, L.A. A Machine Learning Approach to Detect Changes in Gait Parameters Following a Fatiguing Occupational Task. Ergonomics 2018, 61, 1116–1129. [Google Scholar] [CrossRef] [PubMed]
- Konak, O.; Wegner, P.; Arnrich, B. Imu-Based Movement Trajectory Heatmaps for Human Activity Recognition. Sensors 2020, 20, 7179. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Rouhani, H.; Crevoisier, X.; Aminian, K. Quantitative Estimation of Foot-Flat and Stance Phase of Gait Using Foot-Worn Inertial Sensors. Gait Posture 2013, 37, 229–234. [Google Scholar] [CrossRef]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J.S. Validity and Reliability Ofwearable Sensors for Joint Angle Estimation: A Systematic Review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef] [Green Version]
- Routhier, F.; Duclos, N.C.; Lacroix, É.; Lettre, J.; Turcotte, E.; Hamel, N.; Michaud, F.; Duclos, C.; Archambault, P.S.; Bouyer, L.J. Clinicians’ Perspectives on Inertial Measurement Units in Clinical Practice. PLoS ONE 2020, 15, e0241922. [Google Scholar] [CrossRef]
- Nazarahari, M.; Noamani, A.; Ahmadian, N.; Rouhani, H. Sensor-to-Body Calibration Procedure for Clinical Motion Analysis of Lower Limb Using Magnetic and Inertial Measurement Units. J. Biomech. 2019, 85, 224–229. [Google Scholar] [CrossRef]
- Kunze, K.; Lukowicz, P. Sensor Placement Variations in Wearable Activity Recognition. IEEE Pervasive Comput. 2014, 13, 32–41. [Google Scholar] [CrossRef]
- Amini, N.; Sarrafzadeh, M.; Vahdatpour, A.; Xu, W. Accelerometer-Based on-Body Sensor Localization for Health and Medical Monitoring Applications. Pervasive Mob. Comput. 2011, 7, 746–760. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zimmermann, T.; Taetz, B.; Bleser, G. IMU-to-Segment Assignment and Orientation Alignment for the Lower Body Using Deep Learning. Sensors 2018, 18, 302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saeedi, R.; Schimert, B.; Ghasemzadeh, H. Cost-Sensitive Feature Selection for on-Body Sensor Localization. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 833–842. [Google Scholar]
- Fujinami, K.; Jin, C.; Kouchi, S. Tracking On-Body Location of a Mobile Phone. In Proceedings of the International Symposium on Wearable Computers (ISWC 2010), Late Breaking Results-Cutting Edge Technologies on Wearable Computing, Seoul, Republic of Korea, 10–13 October 2010; pp. 190–197. [Google Scholar]
- Shi, Y.; Shi, Y.; Liu, J. A Rotation Based Method for Detecting On-Body Positions of Mobile Devices. In Proceedings of the 13th International Conference on Ubiquitous Computing, Beijing, China, 17–21 September 2011; pp. 559–560. [Google Scholar]
- Wiese, J.; Saponas, T.S.; Brush, A.J.B. Phoneprioception: Enabling Mobile Phones to Infer Where They Are Kept. In Proceedings of the ACM Conference on Human Factors in Computing Systems, Paris, France, 27 April–2 May 2013; pp. 2157–2166. [Google Scholar]
- Kunze, K.; Lukowicz, P.; Junker, H.; Tröster, G. Where Am I: Recognizing on-Body Positions of Wearable Sensors. Lect. Notes Comput. Sci. 2005, 3479, 264–275. [Google Scholar]
- Mannini, A.; Sabatini, A.M.; Intille, S.S. Accelerometry-Based Recognition of the Placement Sites of a Wearable Sensor. Pervasive Mob. Comput. 2015, 21, 62–74. [Google Scholar] [CrossRef] [Green Version]
- Weenk, D.; Van Beijnum, B.J.F.; Baten, C.T.; Hermens, H.J.; Veltink, P.H. Automatic Identification of Inertial Sensor Placement on Human Body Segments during Walking. J. Neuroeng. Rehabil. 2013, 10, 31. [Google Scholar] [CrossRef] [Green Version]
- Sang, V.N.T.; Yano, S.; Kondo, T. On-Body Sensor Positions Hierarchical Classification. Sensors 2018, 18, 3612. [Google Scholar] [CrossRef] [Green Version]
- McCamley, J.; Donati, M.; Grimpampi, E.; Mazzà, C. An Enhanced Estimate of Initial Contact and Final Contact Instants of Time Using Lower Trunk Inertial Sensor Data. Gait Posture 2012, 36, 316–318. [Google Scholar] [CrossRef]
- Graurock, D.; Schauer, T.; Seel, T. Automatic Pairing of Inertial Sensors to Lower Limb Segments—A Plug-and-Play Approach. Curr. Dir. Biomed. Eng. 2016, 2, 715–718. [Google Scholar] [CrossRef]
- Barnett, S.; Cunningham, J.L.; West, S. A Comparison of Vertical Force and Temporal Parameters Produced by an In-Shoe Pressure Measuring System and a Force Platform. Clin. Biomech. 2001, 16, 353–357. [Google Scholar] [CrossRef] [PubMed]
- Baniasad, M.; Martin, R.; Crevoisier, X.; Pichonnaz, C.; Becce, F.; Aminian, K. Knee Adduction Moment Decomposition: Toward Better Clinical Decision-Making. Front. Bioeng. Biotechnol. 2022, 10, 689–699. [Google Scholar] [CrossRef] [PubMed]
- Choi, A.; Jung, H.; Mun, J.H. Single Inertial Sensor-Based Neural Networks to Estimate COM-COP Inclination Angle during Walking. Sensors 2019, 19, 2974. [Google Scholar] [CrossRef] [Green Version]
- Aminian, K.; Najafi, B.; Büla, C.; Leyvraz, P.F.; Robert, P. Spatio-Temporal Parameters of Gait Measured by an Ambulatory System Using Miniature Gyroscopes. J. Biomech. 2002, 35, 689–699. [Google Scholar] [CrossRef] [PubMed]
- Allseits, E.; Lučarević, J.; Gailey, R.; Agrawal, V.; Gaunaurd, I.; Bennett, C. The Development and Concurrent Validity of a Real-Time Algorithm for Temporal Gait Analysis Using Inertial Measurement Units. J. Biomech. 2017, 55, 27–33. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Teufl, W.; Lorenz, M.; Miezal, M.; Taetz, B.; Fröhlich, M.; Bleser, G. Towards Inertial Sensor Based Mobile Gait Analysis: Event-Detection and Spatio-Temporal Parameters. Sensors 2018, 19, 38. [Google Scholar] [CrossRef] [Green Version]
- Fast Fourier Transform. Available online: https://www.mathworks.com/help/matlab/ref/fft.html (accessed on 15 January 2023).
- Hong, J.H.; Cho, S.B. A Probabilistic Multi-Class Strategy of One-vs.-Rest Support Vector Machines for Cancer Classification. Neurocomputing 2008, 71, 3275–3281. [Google Scholar] [CrossRef]
- Halilaj, E.; Rajagopal, A.; Fiterau, M.; Hicks, J.L.; Hastie, T.J.; Delp, S.L. Machine Learning in Human Movement Biomechanics: Best Practices, Common Pitfalls, and New Opportunities. J. Biomech. 2018, 81, 1–11. [Google Scholar] [CrossRef]
- Radovic, M.; Ghalwash, M.; Filipovic, N.; Obradovic, Z. Minimum Redundancy Maximum Relevance Feature Selection Approach for Temporal Gene Expression Data. BMC Bioinform. 2017, 18, 9. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Li, C. MRMR-Based Feature Selection for Classification of Cotton Foreign Matter Using Hyperspectral Imaging. Comput. Electron. Agric. 2015, 119, 191–200. [Google Scholar] [CrossRef]
- Dietterich, T.G. Approximate Statistical Tests for Comparing Supervised Classification Learning Algorithms. Neural Comput. 1998, 10, 1895–1923. [Google Scholar] [CrossRef] [Green Version]
- Falbriard, M.; Meyer, F.; Mariani, B.; Millet, G.P.; Aminian, K. Drift-Free Foot Orientation Estimation in Running Using Wearable IMU. Front. Bioeng. Biotechnol. 2020, 8, 65. [Google Scholar] [CrossRef]
- Behera, B.; Kumaravelan, G.; Kumar, P. Performance Evaluation of Deep Learning Algorithms in Biomedical Document Classification. In Proceedings of the 2019 11th international conference on advanced computing (ICoAC), Chennai, India, 18–20 December 2019; pp. 220–224. [Google Scholar]
- Felius, R.A.W.; Geerars, M.; Bruijn, S.M.; van Dieën, J.H.; Wouda, N.C.; Punt, M. Reliability of IMU-Based Gait Assessment in Clinical Stroke Rehabilitation. Sensors 2022, 22, 908. [Google Scholar] [CrossRef]
- Soltani, A.; Aminian, K.; Mazza, C.; Cereatti, A.; Palmerini, L.; Bonci, T.; Paraschiv-Ionescu, A. Algorithms for Walking Speed Estimation Using a Lower-Back-Worn Inertial Sensor: A Cross-Validation on Speed Ranges. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1955–1964. [Google Scholar] [CrossRef]
- Luo, W.; Phung, D.; Tran, T.; Gupta, S.; Rana, S.; Karmakar, C.; Shilton, A.; Yearwood, J.; Dimitrova, N.; Ho, T.B.; et al. Guidelines for Developing and Reporting Machine Learning Predictive Models in Biomedical Research: A Multidisciplinary View. J. Med. Internet Res. 2016, 18, e232. [Google Scholar] [CrossRef] [Green Version]
- Tong, K.; Granat, M.H. A Practical Gait Analysis System Using Gyroscopes. Med. Eng. Phys. 1999, 21, 87–94. [Google Scholar] [CrossRef]
- Paraschiv-Ionescu, A.; Perruchoud, C.; Buchser, E.; Aminian, K. Barcoding Human Physical Activity to Assess Chronic Pain Conditions. PLoS ONE 2012, 7, e32239. [Google Scholar] [CrossRef] [Green Version]



 . The dotted vertical line shows the second estimate of stride time obtained through Equation (1). The solid vertical line indicates the measured stride time using the instrumented insole. In this case, the first estimates of stride time () extracted from Gyrx, Gyrz, and Accx were similar and had a minimum absolute difference with the second estimate (dotted line), so it was considered as the mean stride time of this walking bout.
. The dotted vertical line shows the second estimate of stride time obtained through Equation (1). The solid vertical line indicates the measured stride time using the instrumented insole. In this case, the first estimates of stride time () extracted from Gyrx, Gyrz, and Accx were similar and had a minimum absolute difference with the second estimate (dotted line), so it was considered as the mean stride time of this walking bout.
. The dotted vertical line shows the second estimate of stride time obtained through Equation (1). The solid vertical line indicates the measured stride time using the instrumented insole. In this case, the first estimates of stride time () extracted from Gyrx, Gyrz, and Accx were similar and had a minimum absolute difference with the second estimate (dotted line), so it was considered as the mean stride time of this walking bout.
. The dotted vertical line shows the second estimate of stride time obtained through Equation (1). The solid vertical line indicates the measured stride time using the instrumented insole. In this case, the first estimates of stride time () extracted from Gyrx, Gyrz, and Accx were similar and had a minimum absolute difference with the second estimate (dotted line), so it was considered as the mean stride time of this walking bout.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Age | Sex | Height (cm) | Mass (kg) |
|---|---|---|---|---|
| Healthy subjects (N = 12) | 34.3 ± 9.5 | 11 males 1 female | 177.5 ± 6.5 | 77.3 ± 16.1 |
| Patients (N = 22) | 45.4 ± 11.6 | 16 males 6 females | 173.7 ± 10.1 | 87.6 ± 15.7 |
| (a) Segment detection classifier | |||||
| Accuracy | Precision | Sensitivity | Specificity | F1-Measure | |
| Foot | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Shank | 100.0 | 99.9 | 100.0 | 100.0 | 1.00 |
| Thigh | 99.9 | 100.0 | 99.7 | 100.0 | 0.99 |
| Sacrum | 99.0 | 94.5 | 97.5 | 99.2 | 0.96 |
| Trunk | 99.0 | 97.5 | 94.7 | 99.6 | 0.96 |
| Overall | 99.7 | 99.0 | 98.9 | 99.8 | 0.99 |
| (b) Side identification of foot sensor * | |||||
| Right foot | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Left foot | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| (c) Side identification of shank/thigh based on a labeled foot sensor ** | |||||
| Right Shank | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Left Shank | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Right thigh | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Left thigh | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| (d) The whole I2S pairing algorithm | |||||
| Right foot | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Left foot | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Right Shank | 100.0 | 99.8 | 100.0 | 100.0 | 0.99 |
| Left Shank | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Right thigh | 99.9 | 100.0 | 99.4 | 100.0 | 0.99 |
| Left thigh | 100.0 | 100.0 | 100.0 | 100.0 | 1.00 |
| Sacrum | 99.0 | 94.5 | 97.5 | 99.2 | 0.96 |
| Trunk | 99.0 | 97.5 | 94.7 | 99.6 | 0.96 |
| Overall | 99.7 | 99.0 | 98.9 | 99.8 | 0.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baniasad, M.; Martin, R.; Crevoisier, X.; Pichonnaz, C.; Becce, F.; Aminian, K. Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait. Sensors 2023, 23, 3587. https://doi.org/10.3390/s23073587
Baniasad M, Martin R, Crevoisier X, Pichonnaz C, Becce F, Aminian K. Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait. Sensors. 2023; 23(7):3587. https://doi.org/10.3390/s23073587
Chicago/Turabian StyleBaniasad, Mina, Robin Martin, Xavier Crevoisier, Claude Pichonnaz, Fabio Becce, and Kamiar Aminian. 2023. "Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait" Sensors 23, no. 7: 3587. https://doi.org/10.3390/s23073587
APA StyleBaniasad, M., Martin, R., Crevoisier, X., Pichonnaz, C., Becce, F., & Aminian, K. (2023). Automatic Body Segment and Side Recognition of an Inertial Measurement Unit Sensor during Gait. Sensors, 23(7), 3587. https://doi.org/10.3390/s23073587