



Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter

Abstract
:1. Introduction
2. GNSS and IMU Integrated Filter Design
2.1. Extended Kalman Filter
2.2. Error State Kalman filter
2.2.1. Continuous Time Kinetic Model
2.2.2. Discrete Time Kinetic Model
2.2.3. Development of the Error State Model
2.2.4. The ESKF Prediction Process
2.2.5. The ESKF Observation Process
2.2.6. Combination of ESKF Error State and Nominal State Process
2.2.7. ESKF Error State Reset
3. Robust Localization via RTS Smoothing
3.1. Reliability of Measurement Information
3.2. RTS Fundamental Design
3.3. Segmented RTS Smoothing Algorithm
4. Results and Discussions
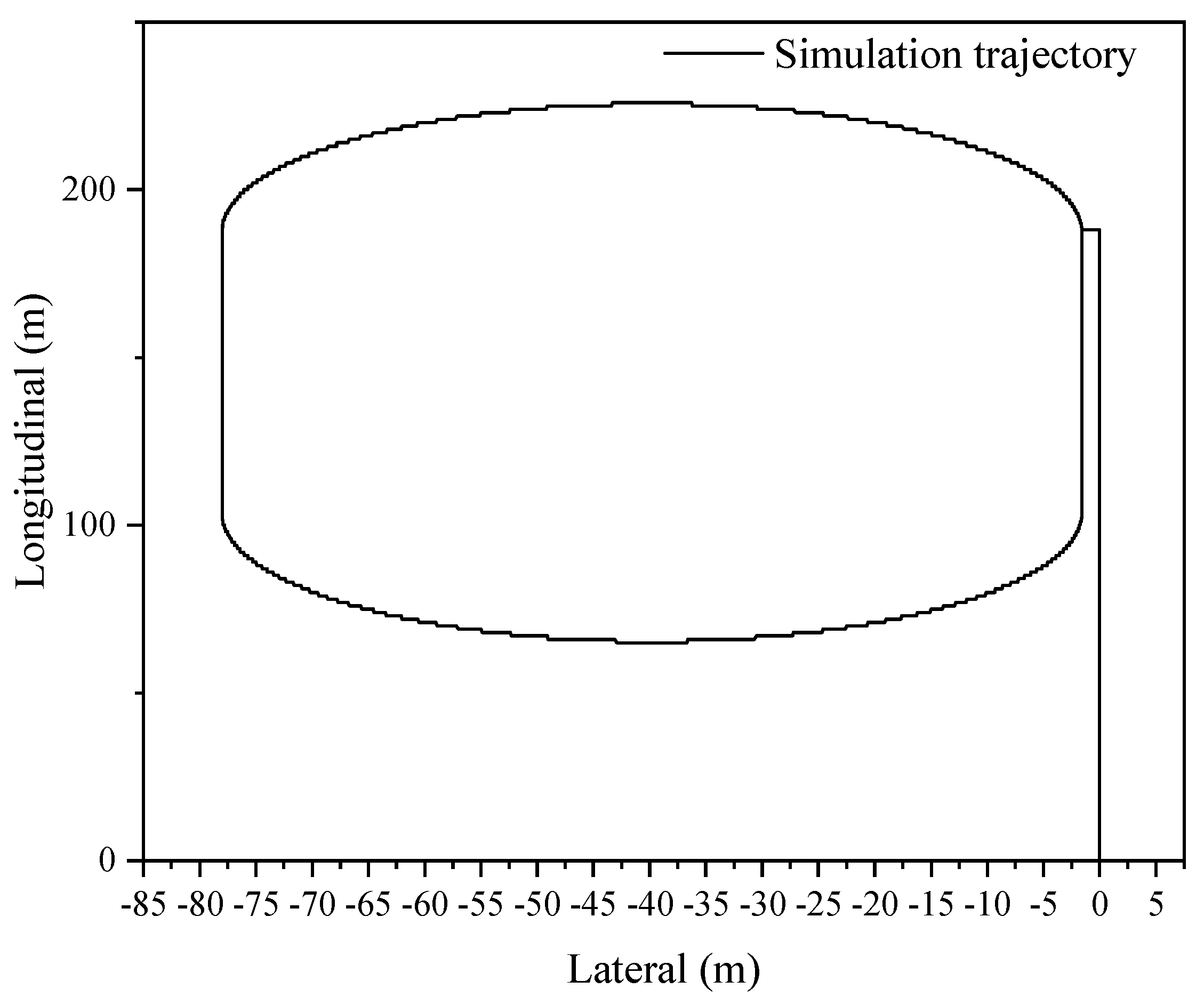
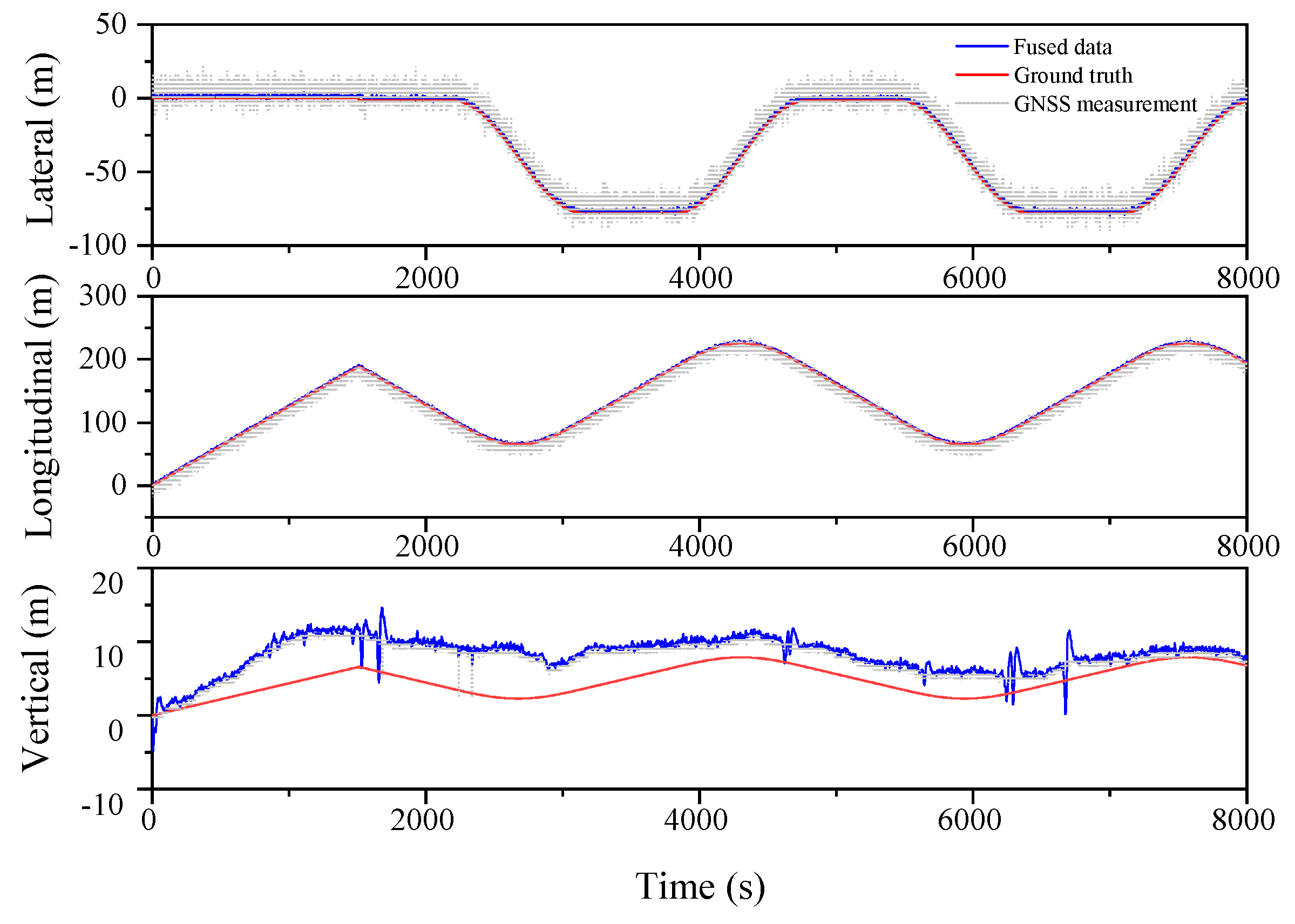
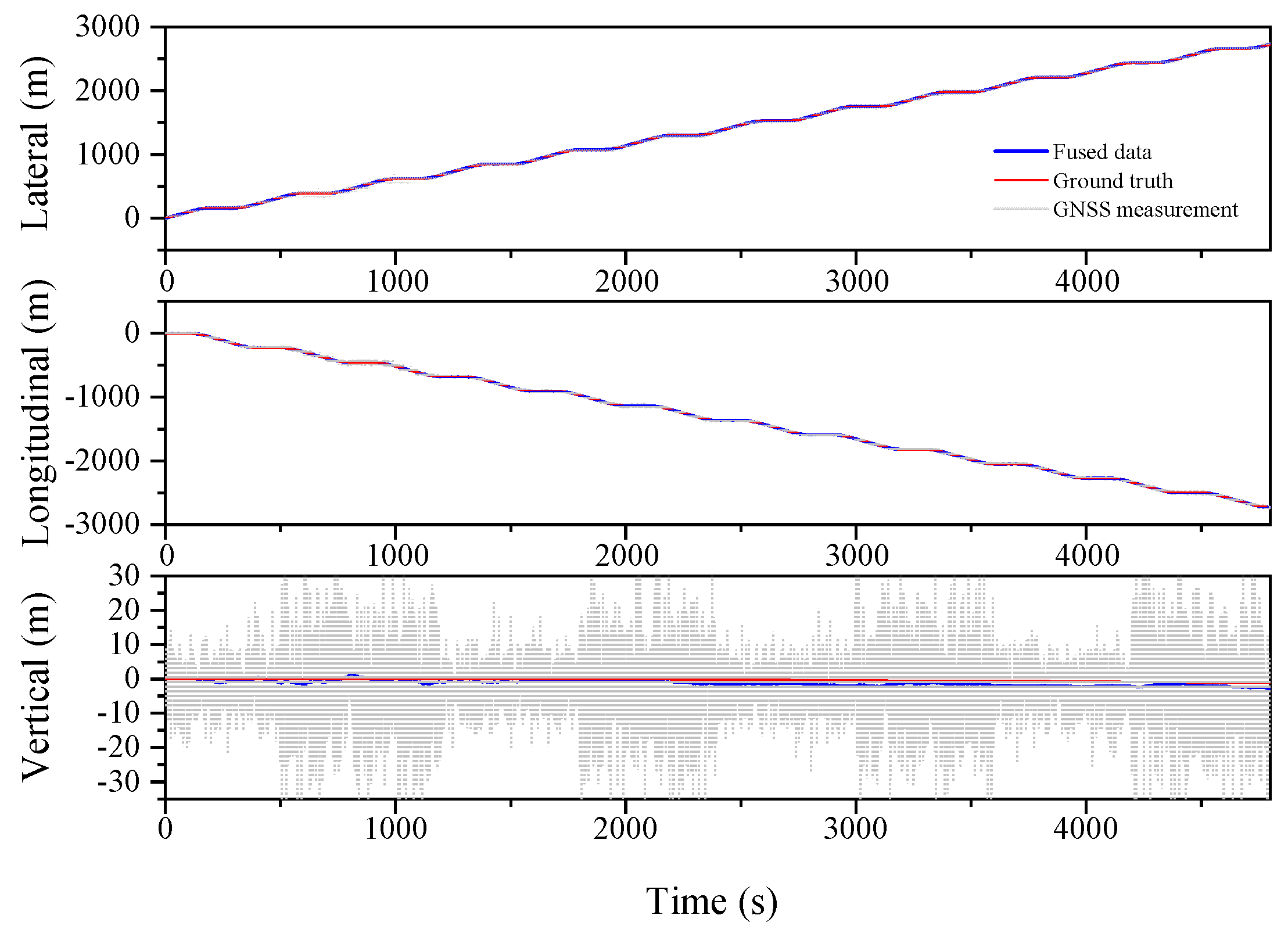
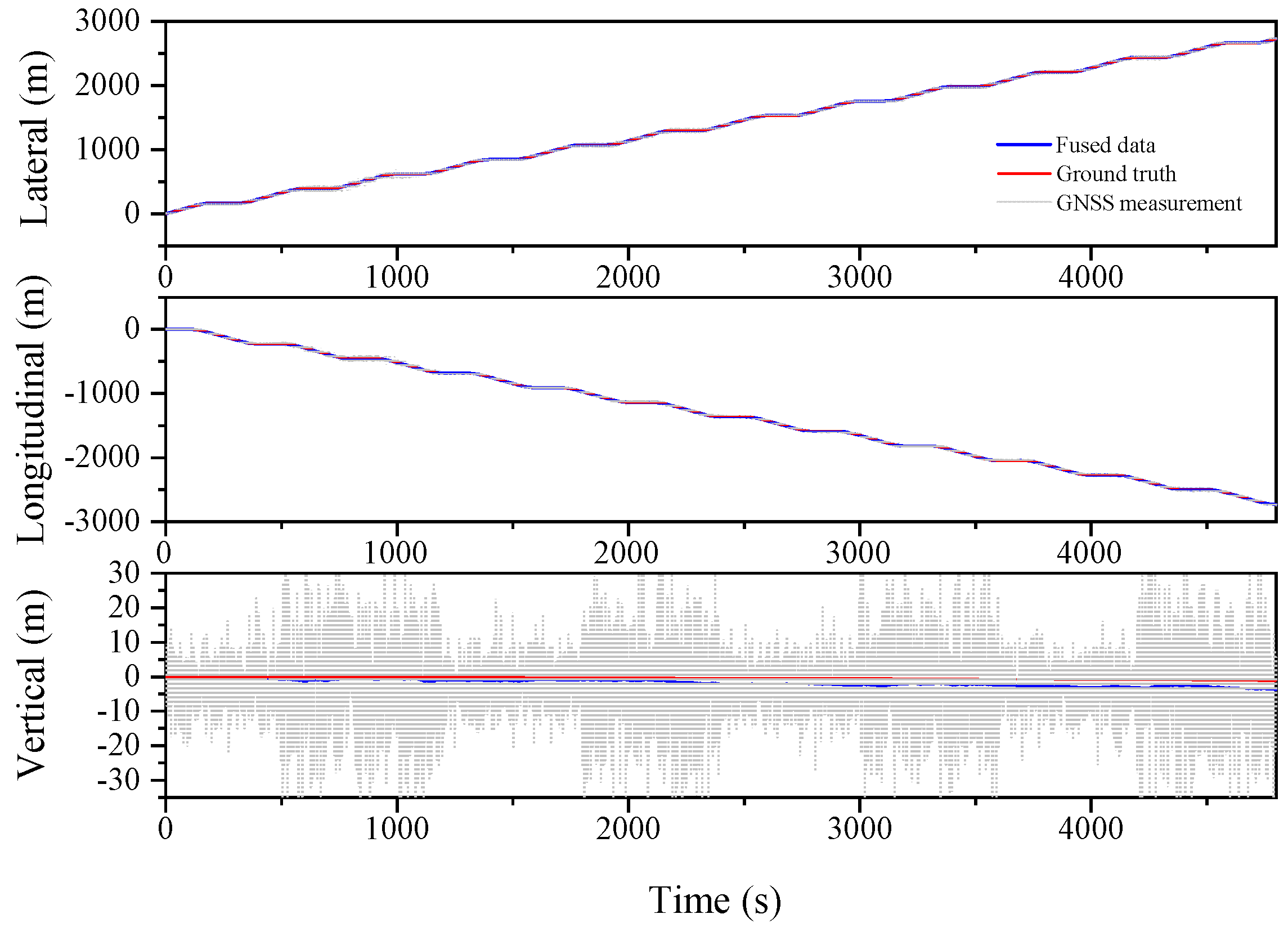
4.1. Oval Track Simulation Analysis
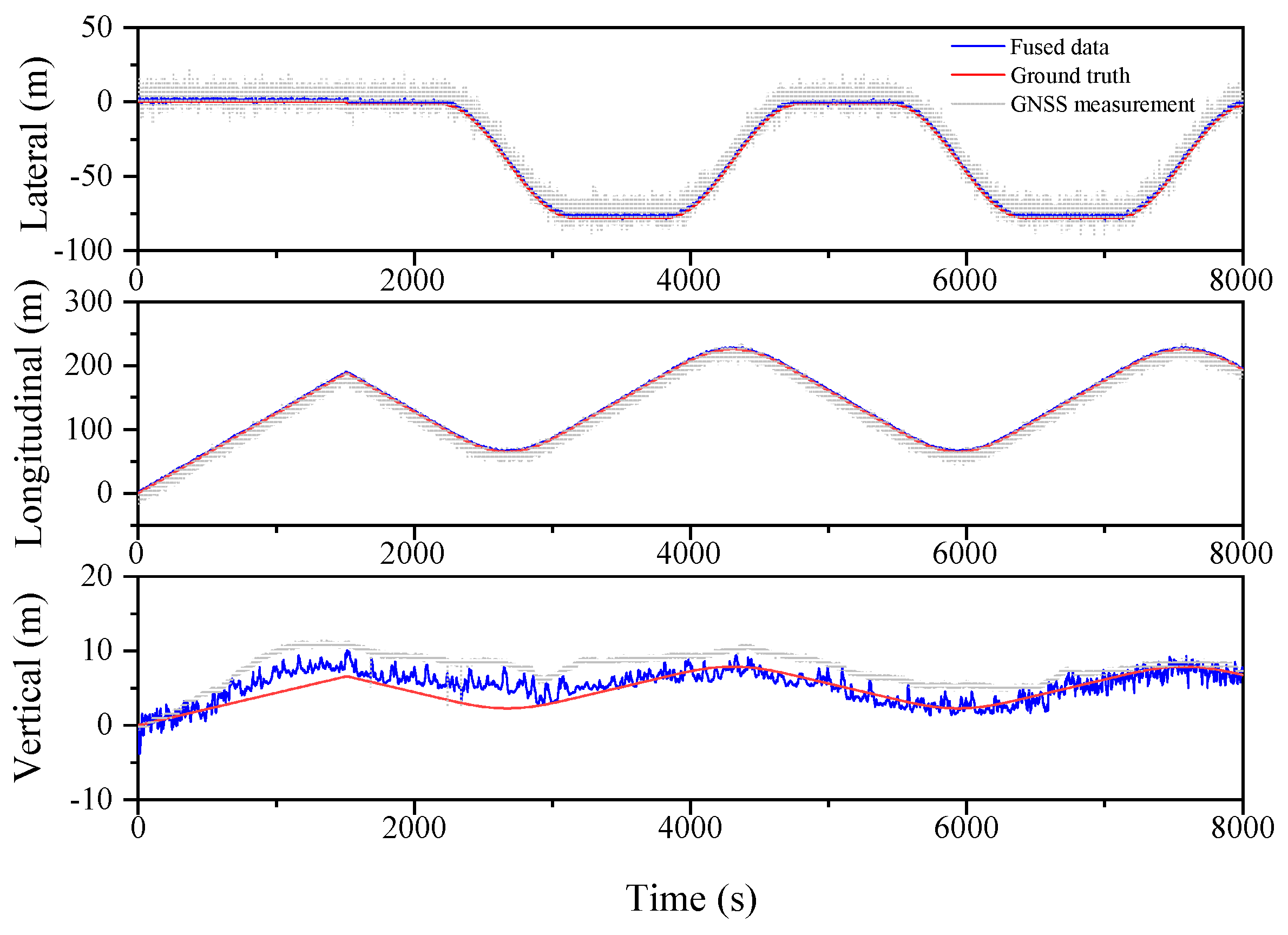
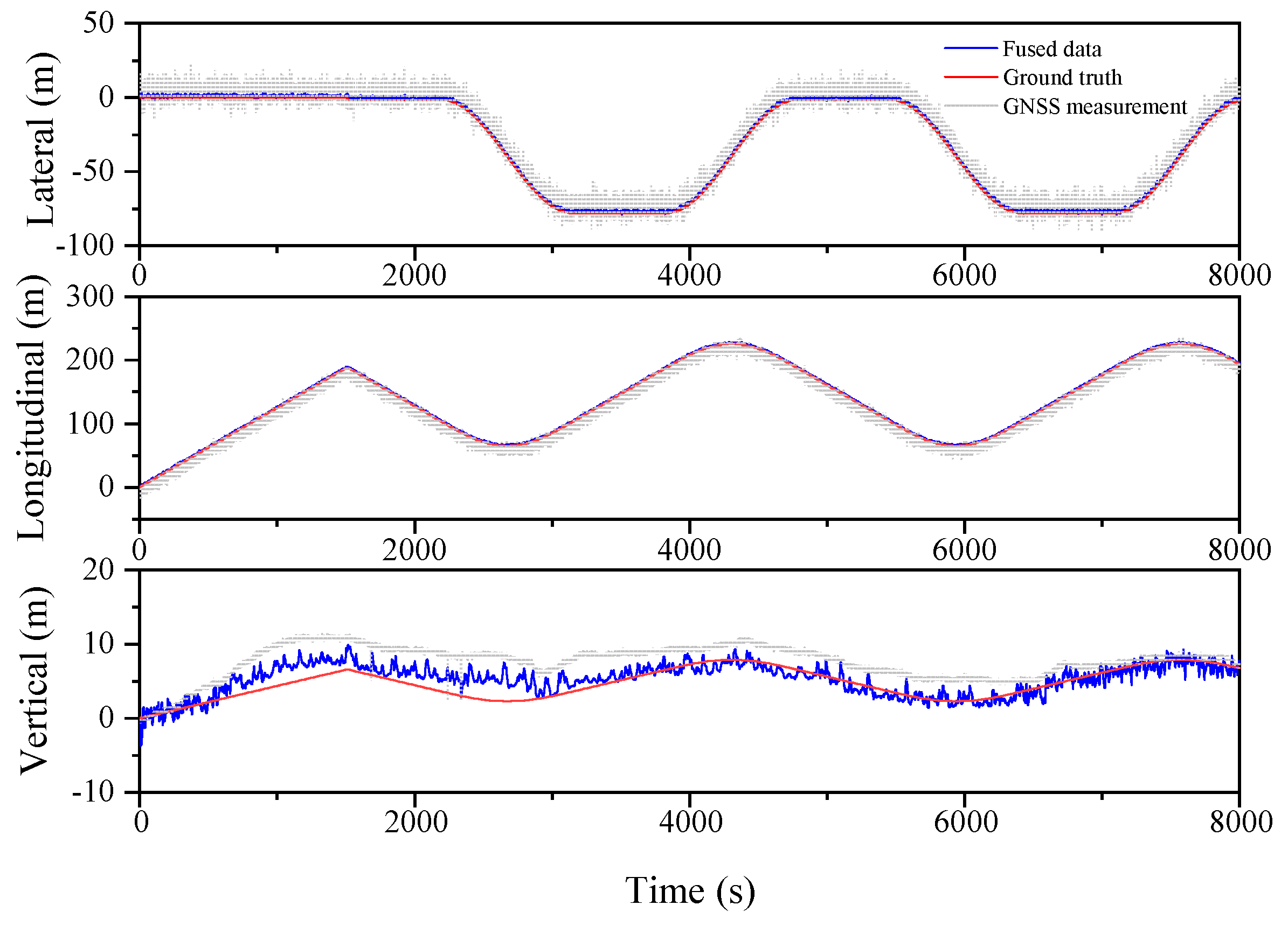
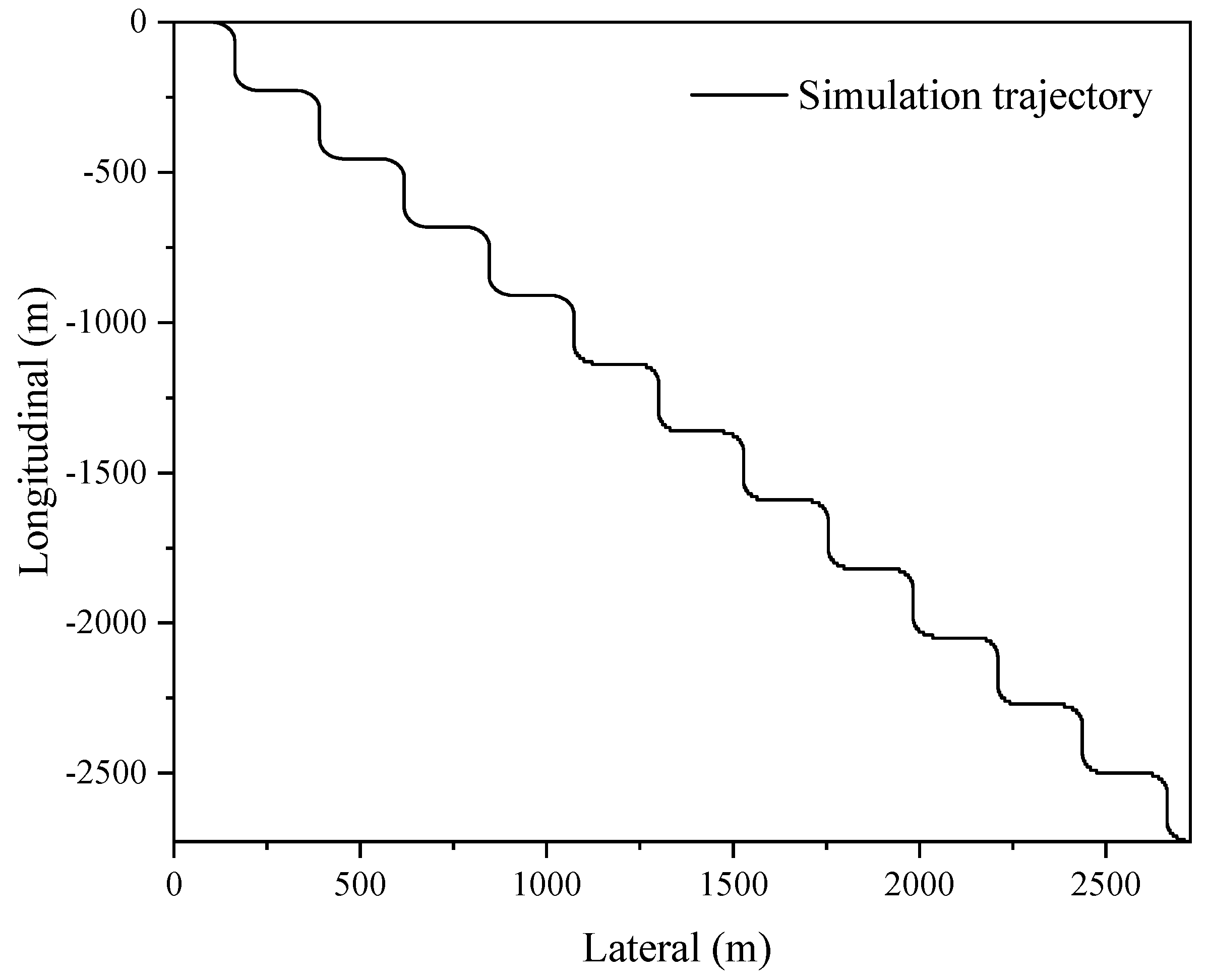
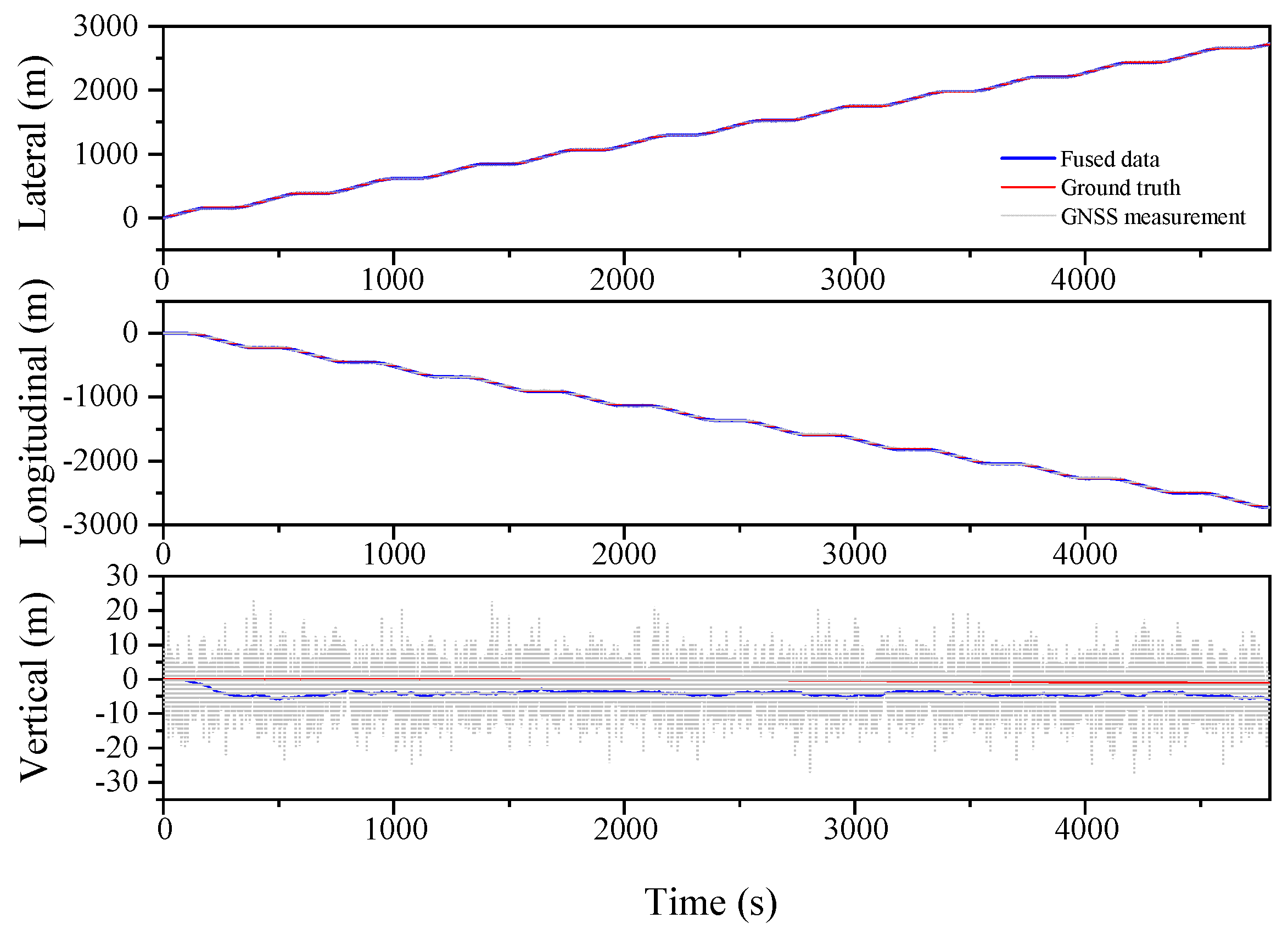
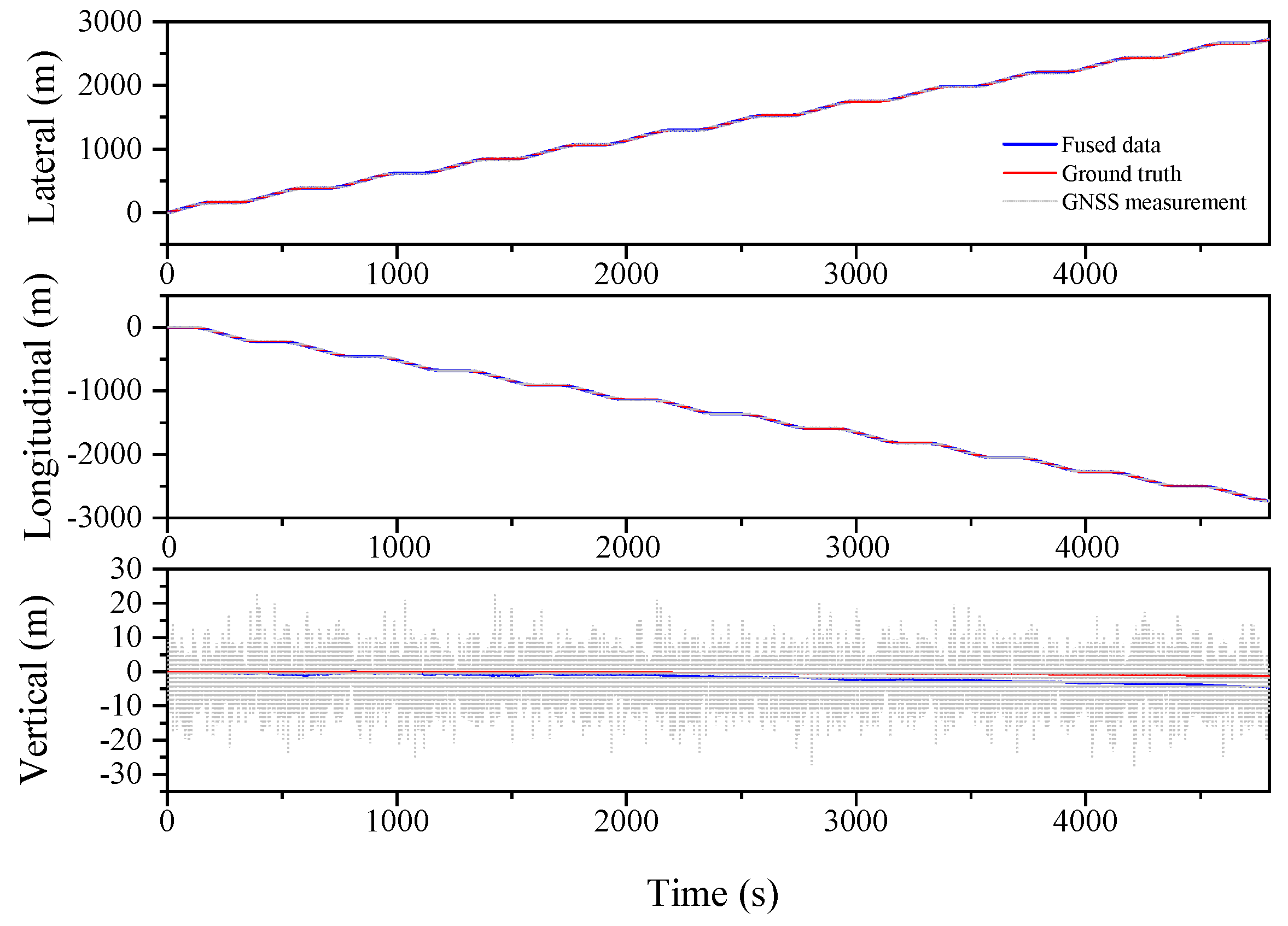
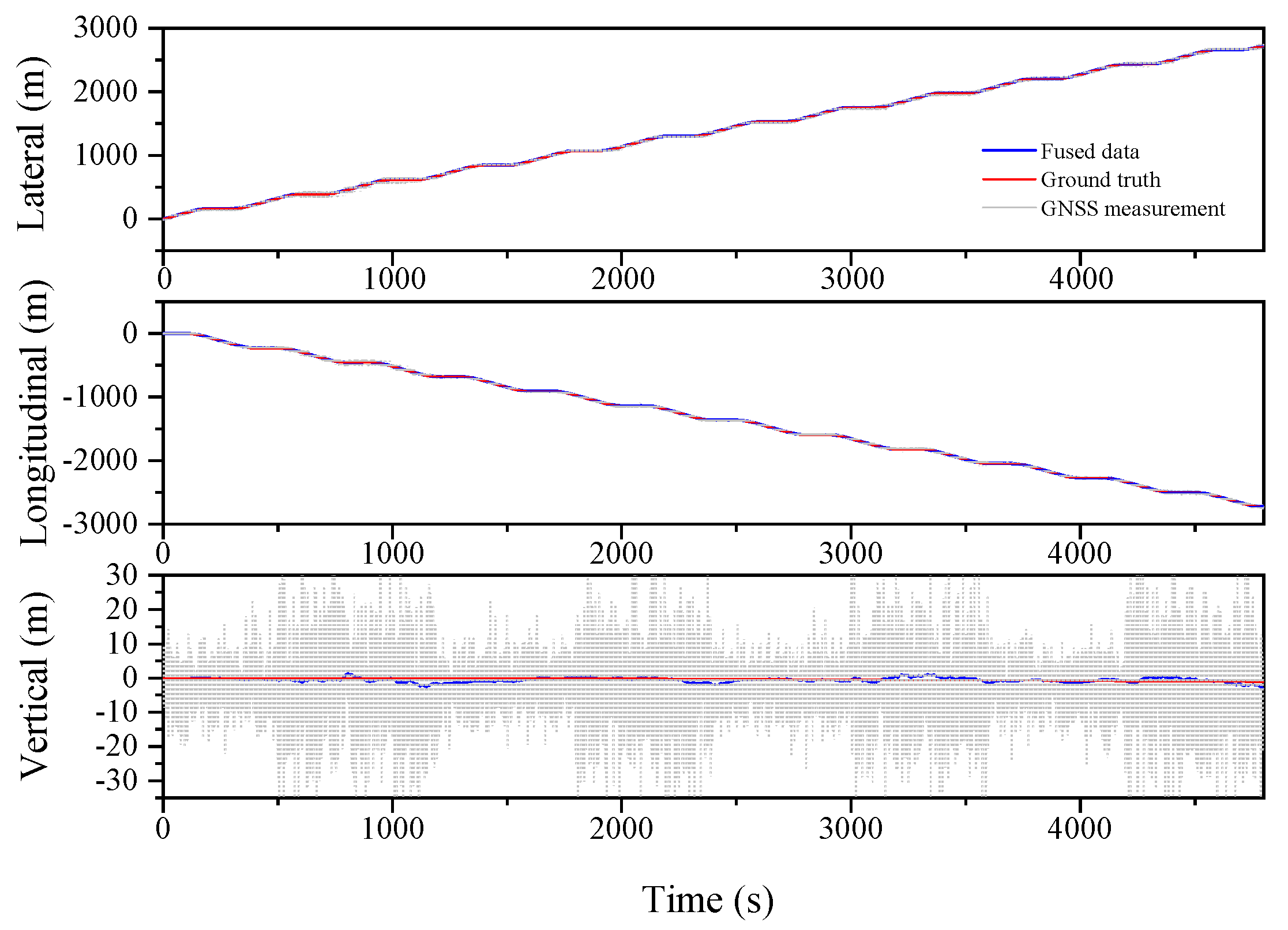
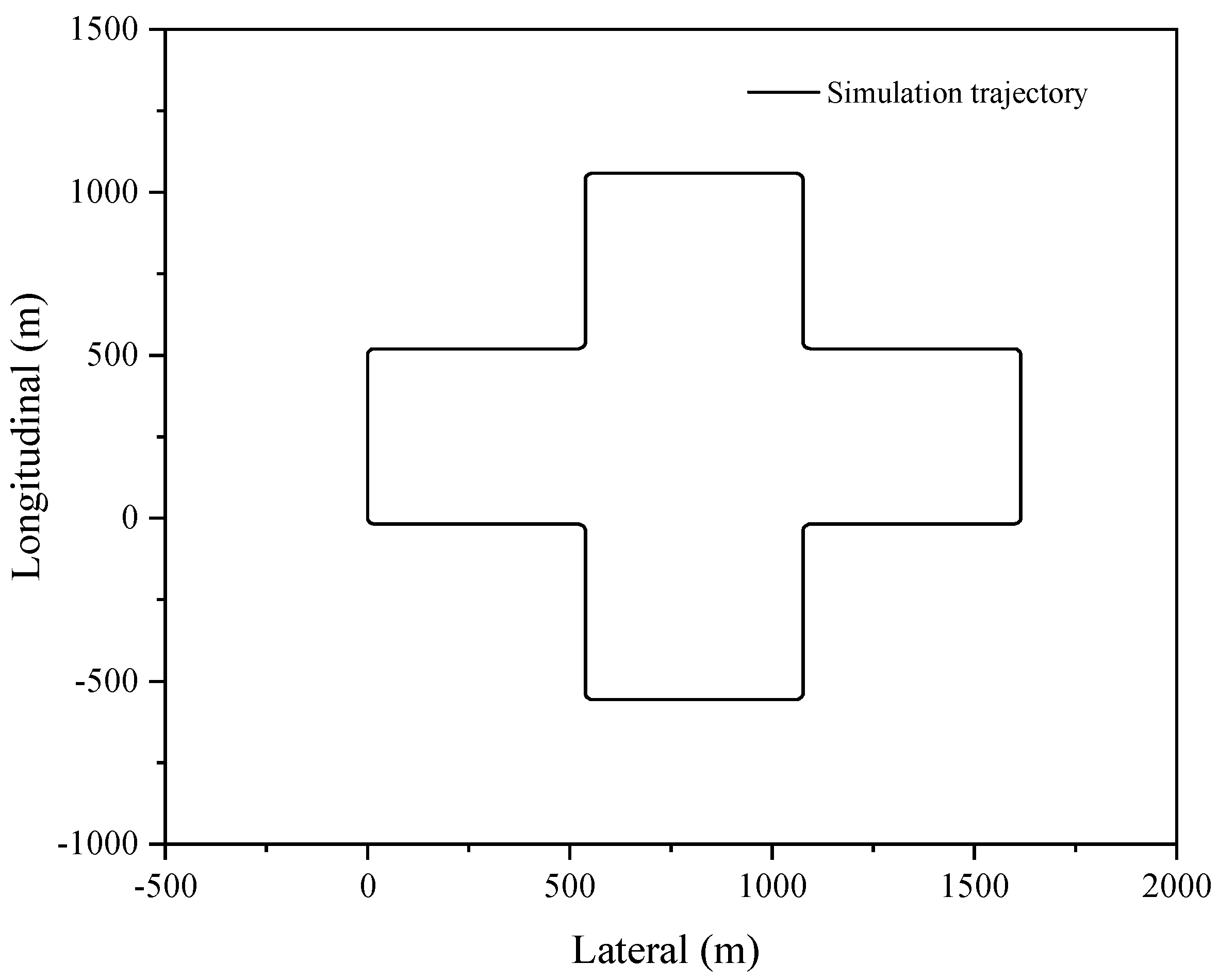
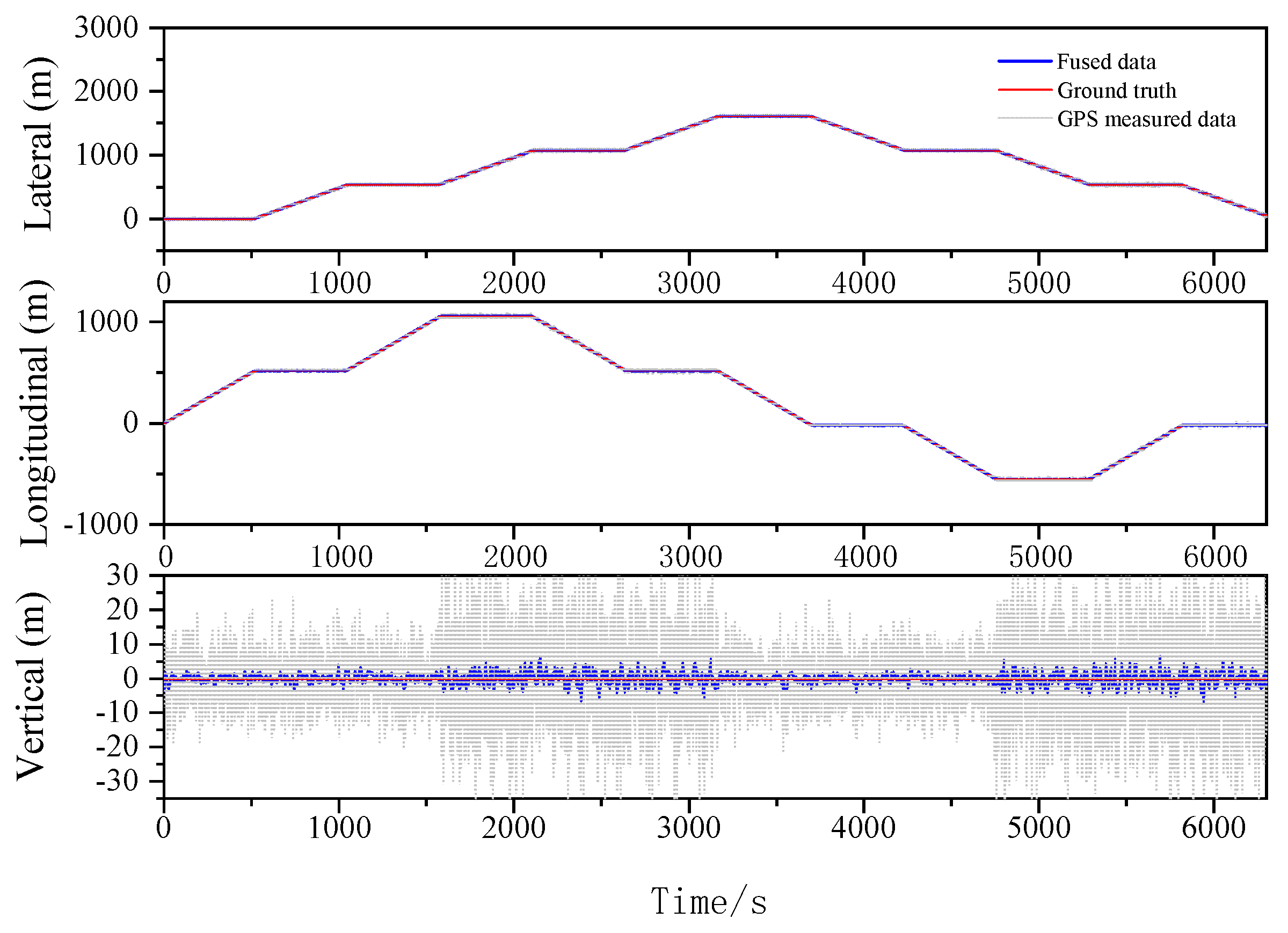
4.2. Serpentine Track Simulation Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation System |
| RTS | Rauch–Tung–Striebel |
| EKF | Extended Kalman filter |
| CKF | Cubature Kalman Filter |
| ESKF | Error state Kalman filter |
| RMS | Root mean square |
| Symbols | |
| System state | |
| Prediction of the system state | |
| Update of the system state | |
| The smoothed estimate of the state vector | |
| The smoothing gain matrix | |
| The covariance of smoothing estimates | |
| Gaussian white noise | |
| System measurement | |
| Measurement of Gaussian white noise | |
| (·) | State functions of nonlinear systems |
| (·) | Measurement functions for nonlinear systems |
| The Jacobi matrix of (·) at | |
| The Jacobi matrix of (·) at | |
| Covariance matrix of states | |
| Covariance matrix of noise | |
| Error character | |
| True state | |
| Nominal state | |
| Position at time t | |
| Velocity at time t | |
| Quaternion at time t | |
| Rotation matrix at time t | |
| The angular vector at time t | |
| Acceleration bias at time t | |
| Angular velocity bias at time t | |
| Acceleration measurement | |
| Angular velocity measurement | |
| Acceleration noise vector | |
| Angular velocity noise vector | |
| Acceleration bias vector | |
| Angular velocity bias vector | |
| Time interval from k to k+1 | |
| Velocity Gaussian random noise | |
| Angular Gaussian random noise | |
| Acceleration bias Gaussian random noise | |
| Velocity biased Gaussian random noise | |
| Corresponding covariance matrix of | |
| Corresponding covariance matrix of | |
| Acceleration Gaussian white noise | |
| Error state Jacobi matrix | |
| Noise state Jacobi matrix | |
| Noise covariance matrix | |
| Smoothing gain matrix | |
| Smooth counter |
References
- Jiang, H.; Shi, C.; Li, T.; Dong, Y.; Li, Y.; Jing, G. Low-cost GNSS/INS integration with accurate measurement modeling using an extended state observer. GNSS Solut. 2020, 25, 17. [Google Scholar]
- Jiang, W.; Liu, D.; Cai, B.; Rizos, C.; Wang, J.; Shangguan, W. A Fault-Tolerant Tightly Coupled GNSS/INS/OVS Integration Vehicle Navigation System Based on an FDP Algorithm. IEEE Trans. Veh. Technol. 2019, 68, 6365–6378. [Google Scholar] [CrossRef]
- Shu, Y.; Xu, P.; Niu, X.; Chen, Q.; Qiao, L.; Liu, J. High-Rate Attitude Determination of Moving Vehicles With GNSS: GPS, BDS, GLONASS, and Galileo. IEEE Trans. Instrum. Meas. 2022, 71, 5501813. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Niu, X.; Gao, Z. Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance. Sensors 2017, 17, 2462. [Google Scholar] [CrossRef] [Green Version]
- Miller, I.; Campbell, M. Sensitivity Analysis of a Tightly-Coupled GNSS/INS System for Autonomous Navigation. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1115–1135. [Google Scholar] [CrossRef]
- Shi, B.; Wang, M.; Wang, Y.; Bai, Y.; Lin, K.; Yang, F. Effect Analysis of GNSS/INS Processing Strategy for Sufficient Utilization of Urban Environment Observations. Sensors 2021, 21, 620. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Xiong, L.; Xia, X.; Lu, Y.; Gao, L.; Song, S. Vision-aided intelligent vehicle sideslip angle estimation based on a dynamic model. IET Intell. Transp. Syst. 2020, 14, 1183–1189. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Automated Vehicle Sideslip Angle Estimation Considering Signal Measurement Characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Shin, E.H.; El-Sheimy, N. Accuracy Improvement of Low Cost INS/GNSS for Land Applications. In Proceedings of the 2002 National Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 28–30 January 2002. [Google Scholar]
- Han, H.; Wang, J.; Wang, J.; Tan, X. Performance Analysis on Carrier Phase-Based Tightly-Coupled GNSS/BDS/INS Integration in GNSS Degraded and Denied Environments. Sensors 2015, 15, 8685–8711. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Zhang, H.; Niu, X.; Zhang, Q. Performance Analysis of Tightly Coupled RTK/INS Algorithm in Case of Insufficient Number of Satellites. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 478–484. [Google Scholar]
- Erfianti, R.; Asfihani, T.; Suhandri, H.F. GNSS/IMU Sensor Fusion Performance Comparison of a Car Localization in Urban Environment Using Extended Kalman Filter. IOP Conf. Ser. Earth Environ. Sci. 2023, 1127, 012006. [Google Scholar] [CrossRef]
- Sabatelli, S.; Galgani, M.; Fanucci, L.; Rocchi, A. A Double-Stage Kalman Filter for Orientation Tracking With an Integrated Processor in 9-D IMU. IEEE Trans. Instrum. Meas. 2012, 62, 590–598. [Google Scholar] [CrossRef]
- Shao, Y.; Xu, F.; Chen, J.; Lu, J.; Du, S. Engineering surface topography analysis using an extended discrete modal decomposition. J. Manuf. Process. 2023, 90, 367–390. [Google Scholar] [CrossRef]
- Zhao, C.; Lui, C.F.; Du, S.; Wang, D.; Shao, Y. An Earth Mover’s Distance based Multivariate Generalized Likelihood Ratio Control Chart for Effective Monitoring of 3D Point Cloud Surface. Comput. Ind. Eng. Comput. Ind. Eng. 2023, 175, 108911. [Google Scholar] [CrossRef]
- Zhao, C.; Du, S.; Lv, J.; Deng, Y.; Li, G. A novel parallel classification network for classifying three-dimensional surface with point cloud data. J. Intell. Manuf. 2023, 34, 515–527. [Google Scholar] [CrossRef]
- Atia, M.M.; Hilal, A.R.; Stellings, C.; Hartwell, E.; Toonstra, J.; Miners, W.B.; Basir, O.A. A Low-Cost Lane-Determination System Using GNSS/IMU Fusion and HMM-Based Multistage Map Matching. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3027–3037. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New Extension of the Kalman Filter to Nonlinear Systems. Signal Processing Sens. Fusion Target Recognit. VI. SPIE 1997, 3068, 182–193. [Google Scholar]
- Arasaratnam, I.; Haykin, S. A numerical-integration perspective on Gaussian filters. IEEE Trans Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Jeon, H.; Min, J.; Bang, H.; Youn, W. Quaternion-Based Iterative Extended Kalman Filter for Sensor Fusion of Vision Sensor and IMU in 6-DOF Displacement Monitoring. IEEE Sens. J. 2022, 22, 23188–23199. [Google Scholar] [CrossRef]
- Lee, J.-C.; Chen, C.-C.; Shen, C.-T.; Lai, Y.-C. Landmark-Based Scale Estimation and Correction of Visual Inertial Odometry for VTOL UAVs in a GPS-Denied Environment. Sensors 2022, 22, 9654. [Google Scholar] [CrossRef]
- Kourabbaslou, S.S.; Zhang, A.; Atia, M.M. A Novel Design Framework for Tightly Coupled IMU/GNSS Sensor Fusion Using Inverse-Kinematics, Symbolic Engines, and Genetic Algorithms. IEEE Sens. J. 2019, 19, 11424–11436. [Google Scholar] [CrossRef]
- Yi, S.; Zorzi, M. Robust Kalman Filtering Under Model Uncertainty: The Case of Degenerate Densities. IEEE Trans. Autom. Control 2021, 67, 3458–3471. [Google Scholar] [CrossRef]
- Yi, S.; Zorzi, M. Robust fixed-lag smoothing under model perturbations. J. Frankl. Inst. 2023, 360, 458–483. [Google Scholar] [CrossRef]
- Gao, L.; Xiong, L.; Xia, X.; Lu, Y.; Yu, Z.; Khajepour, A. Improved Vehicle Localization Using On-Board Sensors and Vehicle Lateral Velocity. IEEE Sens. J. 2022, 22, 6818–6831. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control. Syst. Technol. 2022, 31, 179–192. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Huang, Y.; Lu, Y.; Gao, L.; Xu, N.; Yu, Z. Estimation on IMU yaw misalignment by fusing information of automotive onboard sensors. Mech. Syst. Signal Process. 2022, 162, 107993. [Google Scholar] [CrossRef]
- Madyastha, V.K.; Ravindra, V.C.; Mallikarjunan, S.; Goyal, A. Extended Kalman filter vs. error state Kalman filter for aircraft attitude estimation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 8–11 August 2011. [Google Scholar]
- He, J.; Sun, C.; Zhang, B.; Wang, P. Adaptive Error-State Kalman Filter for Attitude Determination on a Moving Platform. IEEE Trans. Instrum. Meas. 2021, 70, 9513110. [Google Scholar] [CrossRef]
- Critchley-Marrows, J.J.R.; Wu, X.; Cairns, I.H. Treatment of Extended Kalman Filter Implementations for the Gyroless Star Tracker. Sensors 2022, 22, 9002. [Google Scholar] [CrossRef]
- Xia, M.; Sun, P.; Guan, L.; Zhang, Z. Research on Algorithm of Airborne Dual-Antenna GNSS/MINS Integrated Navigation System. Sensors 2023, 23, 1691. [Google Scholar] [CrossRef]
- Ke, Y.; Lv, Z.; Zhang, C.; Deng, X.; Zhou, W.; Song, D. Tightly Coupled GNSS/INS Integration Spoofing Detection Algorithm Based on Innovation Rate Optimization and Robust Estimation. IEEE Access 2022, 10, 72444–72457. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Niu, X. Estimate the Pitch and Heading Mounting Angles of the IMU for Land Vehicular GNSS/INS Integrated System. IEEE Trans. Intell. Transp. Syst. 2020, 22, 6503–6515. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhong, Y.; Zhu, X. Cubature Kalman Filter With Both Adaptability and Robustness for Tightly-Coupled GNSS/INS Integration. IEEE Sens. J. 2021, 21, 14997–15011. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Cheng, Z.; Jia, X.; Zhang, L.; Li, L.; Zhao, D. A Novel Deep Learning Approach to 5G CSI/Geomagnetism/VIO Fused Indoor Localization. Sensors 2023, 23, 1311. [Google Scholar] [CrossRef]
- Akeila, E.; Salcic, Z.; Swain, A. Reducing Low-Cost INS Error Accumulation in Distance Estimation Using Self-Resetting. IEEE Trans. Instrum. Meas. 2013, 63, 177–184. [Google Scholar] [CrossRef]
- Chen, C.-L.; He, R.; Peng, C.-C. Development of an Online Adaptive Parameter Tuning vSLAM Algorithm for UAVs in GPS-Denied Environments. Sensors 2022, 22, 8067. [Google Scholar] [CrossRef]
- López, E.; García, S.; Barea, R.; Bergasa, L.M.; Molinos, E.J.; Arroyo, R.; Romera, E.; Pardo, S. A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments. Sensors 2017, 17, 802. [Google Scholar] [CrossRef]
- Elamin, A.; Abdelaziz, N.; El-Rabbany, A. A GNSS/INS/LiDAR Integration Scheme for UAV-Based Navigation in GNSS-Challenging Environments. Sensors 2022, 22, 9908. [Google Scholar] [CrossRef]
- Revert Calabuig, N.; Laarossi, I.; Álvarez González, A.; Pérez Nuñez, A.; González Pérez, L.; García-Minguillán, A.C. Development of a Low-Cost Smart Sensor GNSS System for Real-Time Localization and Orientation for Floating Offshore Wind Platform. Sensors 2023, 23, 925. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, F.; Gao, Y.; Zhao, L. Implementation and Analysis of Tightly Coupled Global Navigation Satellite System Precise Point Localization/Inertial Navigation System (GNSS PPP/INS) with Insufficient Satellites for Land Vehicle Navigation. Sensors 2018, 18, 4305. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zhang, Y.; Shi, Y.; Yuan, S.; Zhu, S. Performance Enhancement of INS and UWB Fusion Localization Method Based on Two-Level Error Model. Sensors 2023, 23, 557. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | True State | Nominal State | Error States |
|---|---|---|---|
| All states | |||
| Location | |||
| Speed | |||
| Quaternion | |||
| Rotation matrix | |||
| Angular vectors | |||
| Acceleration bias | |||
| Angular velocity bias |
| Position Error RMS (m) | Lateral | Longitudinal | Vertical |
|---|---|---|---|
| GNSS | 2.049 | 2.598 | 2.619 |
| EKF | 1.680 | 1.820 | 3.075 |
| ESKF | 1.633 | 1.782 | 1.476 |
| ESKF–RTS | 1.463 | 1.588 | 1.393 |
| Position Error RMS (m) | Lateral | Longitudinal | Vertical |
|---|---|---|---|
| GNSS | 1.912 | 1.793 | 5.680 |
| EKF | 0.955 | 1.585 | 5.823 |
| ESKF | 0.464 | 0.641 | 1.700 |
| ESKF−RTS | 0.206 | 0.243 | 0.912 |
| Position Error RMS (m) | Lateral | Longitudinal | Vertical |
|---|---|---|---|
| GNSS | 3.370 | 3.308 | 8.988 |
| EKF | 1.231 | 1.735 | 1.453 |
| ESKF | 0.635 | 0.890 | 0.957 |
| ESKF−RTS | 0.368 | 0.422 | 1.456 |
| Position Error RMS (m) | Lateral | Longitudinal | Vertical |
|---|---|---|---|
| GNSS | 2.601 | 2.677 | 8.516 |
| EKF | 1.243 | 1.289 | 4.328 |
| ESKF | 1.253 | 1.320 | 1.237 |
| ESKF−RTS | 0.900 | 0.896 | 1.999 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, Y.; Zhang, J.; Guo, M.; Ning, X.; Wang, Y.; Lu, J. Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter. Sensors 2023, 23, 3676. https://doi.org/10.3390/s23073676
Yin Y, Zhang J, Guo M, Ning X, Wang Y, Lu J. Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter. Sensors. 2023; 23(7):3676. https://doi.org/10.3390/s23073676
Chicago/Turabian StyleYin, Yuming, Jinhong Zhang, Mengqi Guo, Xiaobin Ning, Yuan Wang, and Jianshan Lu. 2023. "Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter" Sensors 23, no. 7: 3676. https://doi.org/10.3390/s23073676
APA StyleYin, Y., Zhang, J., Guo, M., Ning, X., Wang, Y., & Lu, J. (2023). Sensor Fusion of GNSS and IMU Data for Robust Localization via Smoothed Error State Kalman Filter. Sensors, 23(7), 3676. https://doi.org/10.3390/s23073676