
Benchmarking Dataset of Signals from a Commercial MEMS Magnetic–Angular Rate–Gravity (MARG) Sensor Manipulated in Regions with and without Geomagnetic Distortion

 , , ,
, , , 

Abstract
:1. Introduction
1.1. Need for a MEMS MARG Benchmarking Dataset
1.2. Related Datasets and Studies
2. Materials and Methods
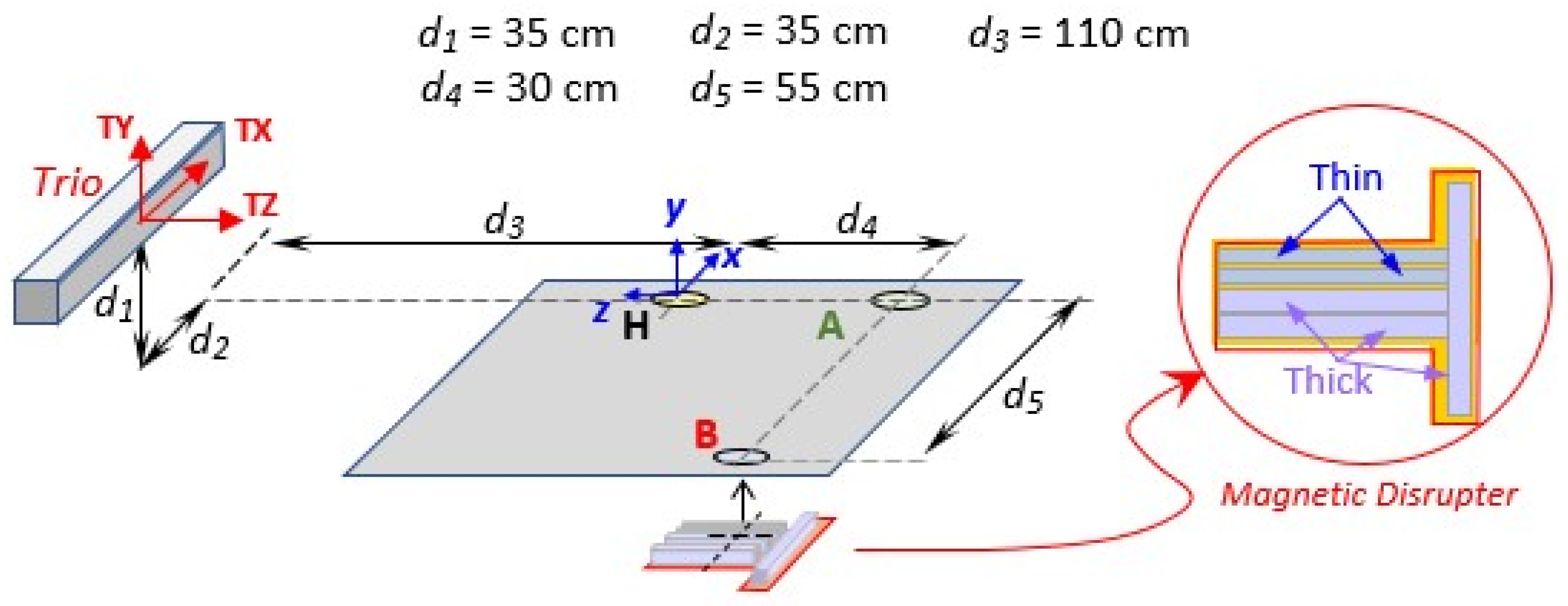
2.1. Recording Environment
2.2. MARG Module, Optical Motion Tracking System, and Magnetic Disrupter Used
2.2.1. MARG Module Used
2.2.2. Optical Motion Capture System Used
2.2.3. Magnetic Disrupters
2.3. Sequence Instructed to the Subjects
2.4. Verification of the Magnetic Disruption Established near Location B
3. Results
3.1. File Organization
3.2. Visualization of the Contents of a Representative File
4. Discussion
- The MARG signals should come from a low-cost, commercially available MEMS MARG module, as it is for these modules that the signal processing requirements are most challenging but the potential rewards are most promising.
4.1. Discussion of the Main Set of Recordings
4.2. Supplementary Recordings: Reverse Location Itinerary and Alternative Disrupter Placements
4.2.1. Reverse Itinerary Recordings
4.2.2. Alternative Positioning of the Magnetic Disruptor
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B


References
- Roylance, L.M.; Angell, J.B. A batch-fabricated silicon accelerometer. IEEE Trans. Electron Devices 1979, 26, 1911–1917. [Google Scholar] [CrossRef]
- Lee, I.; Yoon, G.H.; Park, J.; Seok, S.; Chun, K.; Lee, K.-I. Development and analysis of the vertical capacitive accelerometer. Sens. Actuators A Phys. 2005, 119, 8–18. [Google Scholar] [CrossRef]
- Johnson, R.C. 3-Axis MEMs gyro chip debuts. EE Times. 26 October 2009. Available online: https://www.eetimes.com/3-axis-mems-gyro-chip-debuts/ (accessed on 15 February 2023).
- Titterton, D.H.; Weston, J.L.; Institution of Electrical Engineers. Strapdown Inertial Navigation Technology; Institution of Electrical Engineers: Stevenage, UK, 2004. [Google Scholar]
- Savage, P.G. Strapdown Analytics; Strapdown Associates: Maple Plain, MI, USA, 2000. [Google Scholar]
- Woodman, O.J. An Introduction to Inertial Navigation; Technical Report No. 696, UCAM-CL-TR-696; University of Cambridge: Cambridge, UK, 2007; ISSN 1476-2980. [Google Scholar]
- Aggarwal, P. MEMS-Based Integrated Navigation; Artech House: Boston, MA, USA; London, UK, 2010. [Google Scholar]
- Foxlin, E. Motion Tracking Requirements and Technologies. In Handbook of Virtual Environments, Design, Implementation, and Applications; Stanney, K.M., Ed.; Lawrence Earlbaum Associates: Mahwah, NJ, USA, 2002. [Google Scholar]
- Nazarahari, M.; Rouhani, H. 40 years of sensor fusion for orientation tracking via magnetic and inertial measurement units: Methods, lessons learned, and future challenges. Inf. Fusion 2021, 68, 67–84. [Google Scholar] [CrossRef]
- Ro, H.; Byun, J.-H.; Park, Y.J.; Lee, N.K.; Han, T.-D. AR Pointer: Advanced Ray-Casting Interface Using Laser Pointer Metaphor for Object Manipulation in 3D Augmented Reality Environment. Appl. Sci. 2019, 9, 3078. [Google Scholar] [CrossRef] [Green Version]
- Kortier, H.G.; Sluiter, V.I.; Roetenberg, D.; Veltink, P.H. Assessment of hand kinematics using inertial and magnetic sensors. J. Neuroeng. Rehabil. 2014, 11, 70. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ratchatanantakit, N.; O-larnnithipong, N.; Sonchan, P.; Adjouadi, M.; Barreto, A. A sensor fusion approach to MARG module orientation estimation for a real-time hand tracking application. Inf. Fusion 2023, 90, 298–315. [Google Scholar] [CrossRef]
- de Vries, W.H.K.; Veeger, H.E.J.; Baten, C.T.M.; van der Helm, F.C.T. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Picerno, P. 25 years of lower limb joint kinematics by using inertial and magnetic sensors: A review of methodological approaches. Gait Posture 2017, 51, 239–246. [Google Scholar] [CrossRef] [PubMed]
- Szczęsna, A.; Skurowski, P.; Pruszowski, P.; Pęszor, D.; Paszkuta, M.; Wojciechowski, K. Reference Data Set for Accuracy Evaluation of Orientation Estimation Algorithms for Inertial Motion Capture Systems. In Proceedings of the Computer Vision and Graphics, Cham, Switzerland, 10 September 2016; pp. 509–520. [Google Scholar]
- Angermann, M.; Robertson, P.; Kemptner, T.; Khider, M. A high precision reference data set for pedestrian navigation using foot-mounted inertial sensors. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar]
- Chavarriaga, R.; Sagha, H.; Calatroni, A.; Digumarti, S.T.; Tröster, G.; Millán, J.d.R.; Roggen, D. The Opportunity challenge: A benchmark database for on-body sensor-based activity recognition. Pattern Recognit. Lett. 2013, 34, 2033–2042. [Google Scholar] [CrossRef] [Green Version]
- Banos, O.; Calatroni, A.; Damas, M.; Pomares, H.; Rojas, I.; Sagha, H.; Mill’n, J.d.R.; Troster, G.; Chavarriaga, R.; Roggen, D. Kinect=IMU? Learning MIMO Signal Mappings to Automatically Translate Activity Recognition Systems across Sensor Modalities. In Proceedings of the 2012 16th International Symposium on Wearable Computers, Newcastle, UK, 18–22 June 2012; pp. 92–99. [Google Scholar]
- Szczęsna, A. RepoIMU: Reference Data Set for Accuracy Evaluation of Orientation Estimation Algorithms for Inertial Motion. Capture Systems. 2016. Available online: https://github.com/agnieszkaszczesna/RepoIMU (accessed on 15 February 2023).
- YostLabs. 3-Space Nano IC-Product Description Page. Available online: https://yostlabs.com/product/3-space-nano/ (accessed on 15 February 2023).
- Xsens. MTi-G Miniature AHRS with Integrated GPS. Available online: https://studylib.net/doc/18864299/xsens2020503-brochure-mti (accessed on 15 February 2023).
- Caruso, M.; Sabatini, A.M.; Knaflitz, M.; Gazzoni, M.; Croce, U.D.; Cereatti, A. Orientation Estimation Through Magneto-Inertial Sensor Fusion: A Heuristic Approach for Suboptimal Parameters Tuning. IEEE Sens. J. 2021, 21, 3408–3419. [Google Scholar] [CrossRef]
- Caruso, M. MIMU_OPTICAL_SASSARI_DATASET. 2021. Available online: https://ieee-dataport.org/documents/mimuopticalsassaridataset (accessed on 15 February 2023).
- Nazarahari, M.; Rouhani, H. Sensor fusion algorithms for orientation tracking via magnetic and inertial measurement units: An experimental comparison survey. Inf. Fusion 2021, 76, 8–23. [Google Scholar] [CrossRef]
- Nazarahari, M. Sensor Fusion Algorithm for MIMU Data. 2021. Available online: https://www.ncbl.ualberta.ca/sensor-fusion (accessed on 15 February 2023).
- Roetenberg, D.; Luinge, H.; Veltink, P. Inertial and magnetic sensing of human movement near ferromagnetic materials. In Proceedings of the Second IEEE and ACM International Symposium on Mixed and Augmented Reality, Washington, DC, USA, 7–10 October 2003; pp. 268–269. [Google Scholar]
- Roetenberg, D.; Luinge, H.J.; Baten, C.T.M.; Veltink, P.H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Trans. Neural Syst. Rehabil. Eng. 2005, 13, 395–405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ratchatanantakit, N.; O-larnnithipong, N.; Barreto, A.; Tangnimitchok, S. Consistency Study of 3D Magnetic Vectors in an Office Environment for IMU-based Hand Tracking Input Development. In Proceedings of the Human-Computer Interaction. Recognition and Interaction Technologies, Cham, Switzerland, 26–31 July 2019; pp. 377–387. [Google Scholar]
- YostLabs. 3-Space Sensor Miniature Attitude & Heading Reference System With Pedestrian Tracking User’s Manual. 2017. [Google Scholar]
- Hislop, J.; Isaksson, M.; McCormick, J.; Hensman, C. Validation of 3-Space Wireless Inertial Measurement Units Using an Industrial Robot. Sensors 2021, 21, 6858. [Google Scholar] [CrossRef] [PubMed]
- OptiTrack. Specifications of the V120:Trio Motion Capture System. Available online: https://optitrack.com/cameras/v120-trio/specs.html (accessed on 15 February 2023).
- Hindle, B.R.; Keogh, J.W.L.; Lorimer, A.V. Inertial-Based Human Motion Capture: A Technical Summary of Current Processing Methodologies for Spatiotemporal and Kinematic Measures. Appl. Bionics Biomech. 2021, 2021, 6628320. [Google Scholar] [CrossRef] [PubMed]
- Mathworks. dist: Angular Distance in Radians. Available online: https://www.mathworks.com/help/nav/ref/quaternion.dist.html (accessed on 15 February 2023).
- O-larnnithipong, N.; Barreto, A. Gyroscope drift correction algorithm for inertial measurement unit used in hand motion tracking. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- O-larnnithipong, N.; Barreto, A.B.; Ratchatanantakit, N.; Tangnimitchok, S.; Ortega, F.R. Real-Time Implementation of Orientation Correction Algorithm for 3D Hand Motion Tracking Interface. In Universal Access in Human-Computer Interaction. Methods, Technologies, and Users, Proceedings of the 12th International Conference, UAHCI 2018, Las Vegas, NV, USA, 15–20 July 2018; Springer International Publishing: Cham, Switzerland, 2018; pp. 228–242. [Google Scholar]
- Aurand, A.M.; Dufour, J.S.; Marras, W.S. Accuracy map of an optical motion capture system with 42 or 21 cameras in a large measurement volume. J. Biomech. 2017, 58, 237–240. [Google Scholar] [CrossRef] [PubMed]
- Eichelberger, P.; Ferraro, M.; Minder, U.; Denton, T.; Blasimann, A.; Krause, F.; Baur, H. Analysis of accuracy in optical motion capture–A protocol for laboratory setup evaluation. J. Biomech. 2016, 49, 2085–2088. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vince, J. Quaternions for Computer Graphics; Springer: London, UK; New York, NY, USA, 2011. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AXIS | AXIS DIRECTION |
|---|---|
| x AXIS | Parallel to the (B) to (A) direction, positive towards (A) |
| y AXIS | Parallel to the floor-to-ceiling direction, positive towards the ceiling |
| z AXIS | Parallel to the (A) to (H) direction, positive towards (H) |
| AXIS | AXIS DIRECTION |
|---|---|
| TX AXIS | Parallel to the (B) to (A) direction, positive towards (A) |
| TY AXIS | Parallel to the floor-to-ceiling direction, positive towards the ceiling |
| TZ AXIS | Parallel to the (H) to (A) direction, positive towards (A) |
| Sequence Step | Location | Rotation | Resulting Pose |
|---|---|---|---|
| 1 | H | (Initial location and pose for the task) | 1 <Default Pose> |
| 2 | (to) A | After translation H to A, yields | 1 |
| 3 | A | +90° Z Axis, yields | 2 |
| 4 | A | −90° Z Axis, yields | 1 |
| 5 | A | +90° X Axis, yields | 3 |
| 6 | A | −90° X Axis, yields | 1 |
| 7 | A | +90° Y Axis, yields | 4 |
| 8 | A | −90° Y Axis, yields | 1 |
| 9 | A | −45° Y Axis and + 90° X Axis, yields | 5 |
| 10 | A | +45° Y Axis and − 90° X Axis, yields | 1 |
| 11 | (to) B | Just translation A to B | 6 (same orientation as 1) |
| 12 | B | +90° Z Axis, yields | 7 |
| 13 | B | −90° Z Axis, yields | 6 |
| 14 | B | +90° X Axis, yields | 8 |
| 15 | B | −90° X Axis, yields | 6 |
| 16 | B | +90° Y Axis, yields | 9 |
| 17 | B | −90° Y Axis, yields | 6 |
| 18 | B | −45° Y Axis and + 90° X Axis, yields | 10 |
| 19 | B | + 45° Y Axis and − 90° X Axis, yields | 6 |
| 20 | (to) H | Just translation back to H | 1 |
| Entity (Units) | Column | Data (Header) |
|---|---|---|
| Timestamp (ms) | 1 | Timestamp |
| Trio position (m) | 2 | pos_x |
| 3 | pos_y | |
| 4 | pos_z | |
| Trio orientation (normalized unit quaternion) | 5 | cam_qx |
| 6 | cam_qy | |
| 7 | cam_qz | |
| 8 | cam_qw | |
| Kalman filter orientation (normalized unit quaternion) | 9 | ss_qx |
| 10 | ss_qy | |
| 11 | ss_qz | |
| 12 | ss_qw | |
| Gyroscope readings (rad/s) | 13 | gyro_x |
| 14 | gyro_y | |
| 15 | gyro_z | |
| Accelerometer readings (g) | 16 | acc_x |
| 17 | acc_y | |
| 18 | acc_z | |
| Magnetometer readings (Gauss) | 19 | mag_x |
| 20 | mag_y | |
| 21 | mag_z | |
| Confidence Factor | 22 | stillness |
| isTracked | 23 | isTracked |
| Q-GRAD | Kalman Filter | Q-COMP | |
|---|---|---|---|
| Q distance mean (°) | 83.8225 | 96.8412 | 100.6647 |
| Q distance std. dev. (°) | 8.5298 | 6.5633 | 2.1149 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sonchan, P.; Ratchatanantakit, N.; O-larnnithipong, N.; Adjouadi, M.; Barreto, A. Benchmarking Dataset of Signals from a Commercial MEMS Magnetic–Angular Rate–Gravity (MARG) Sensor Manipulated in Regions with and without Geomagnetic Distortion. Sensors 2023, 23, 3786. https://doi.org/10.3390/s23083786
Sonchan P, Ratchatanantakit N, O-larnnithipong N, Adjouadi M, Barreto A. Benchmarking Dataset of Signals from a Commercial MEMS Magnetic–Angular Rate–Gravity (MARG) Sensor Manipulated in Regions with and without Geomagnetic Distortion. Sensors. 2023; 23(8):3786. https://doi.org/10.3390/s23083786
Chicago/Turabian StyleSonchan, Pontakorn, Neeranut Ratchatanantakit, Nonnarit O-larnnithipong, Malek Adjouadi, and Armando Barreto. 2023. "Benchmarking Dataset of Signals from a Commercial MEMS Magnetic–Angular Rate–Gravity (MARG) Sensor Manipulated in Regions with and without Geomagnetic Distortion" Sensors 23, no. 8: 3786. https://doi.org/10.3390/s23083786
APA StyleSonchan, P., Ratchatanantakit, N., O-larnnithipong, N., Adjouadi, M., & Barreto, A. (2023). Benchmarking Dataset of Signals from a Commercial MEMS Magnetic–Angular Rate–Gravity (MARG) Sensor Manipulated in Regions with and without Geomagnetic Distortion. Sensors, 23(8), 3786. https://doi.org/10.3390/s23083786