
GMM-Based Adaptive Extended Kalman Filter Design for Satellite Attitude Estimation under Thruster-Induced Disturbances


Abstract
:1. Introduction
2. Star Image Generation with PSF
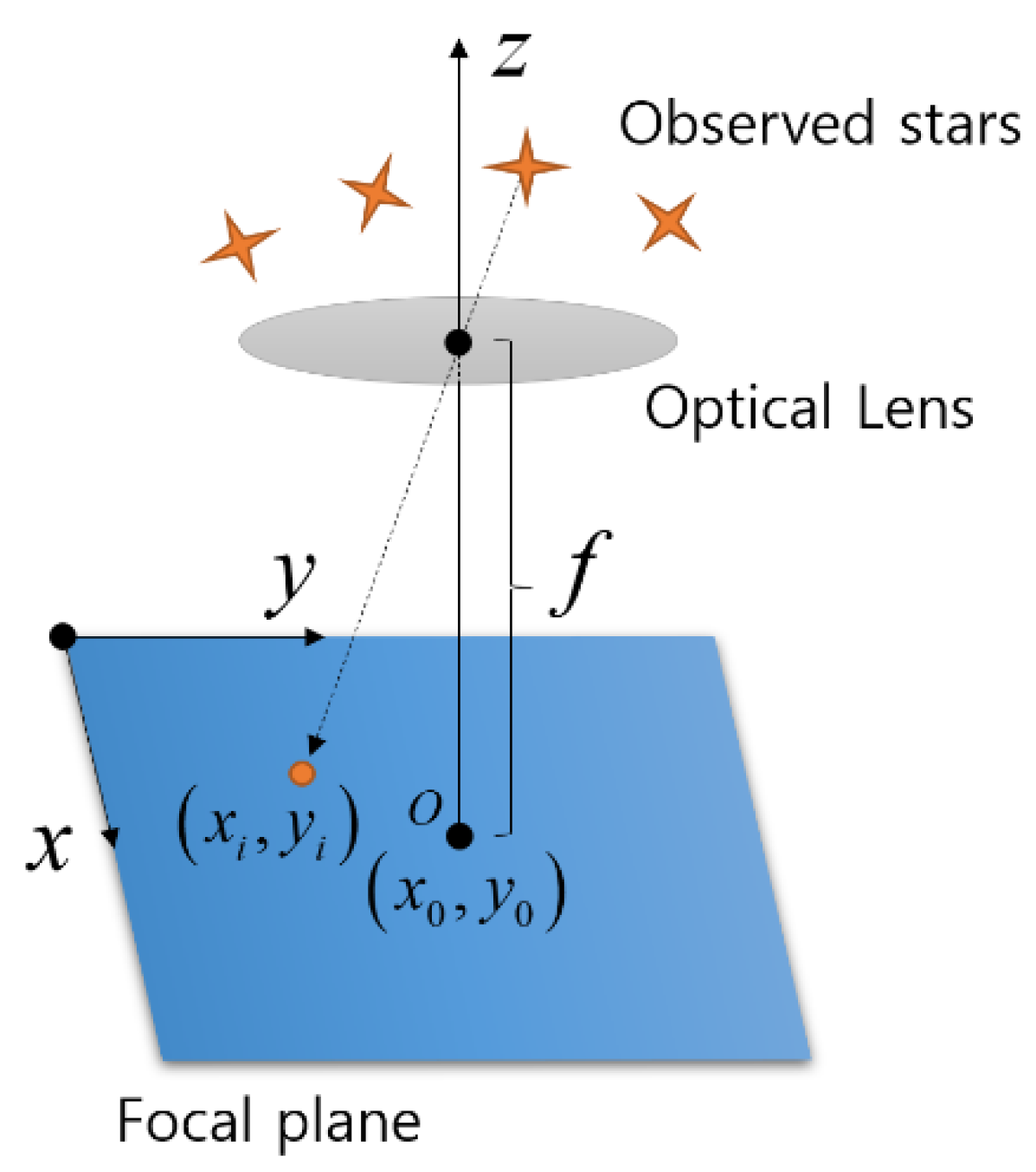
2.1. Pinhole Camera Model of Star Tracker
2.2. Star Tracker Image Generation
2.3. Star Tracker Image under Thruster-Induced Disturbance
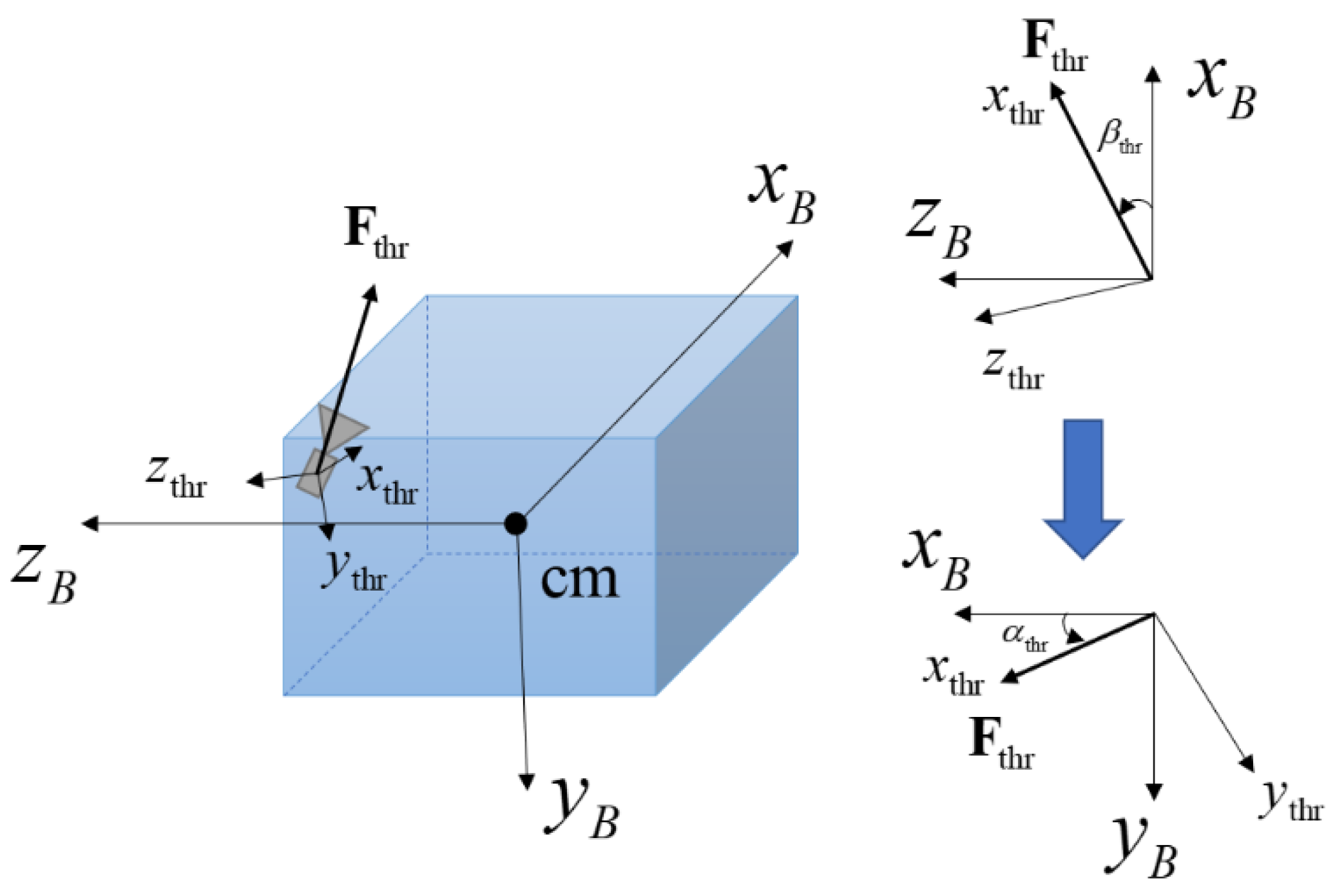
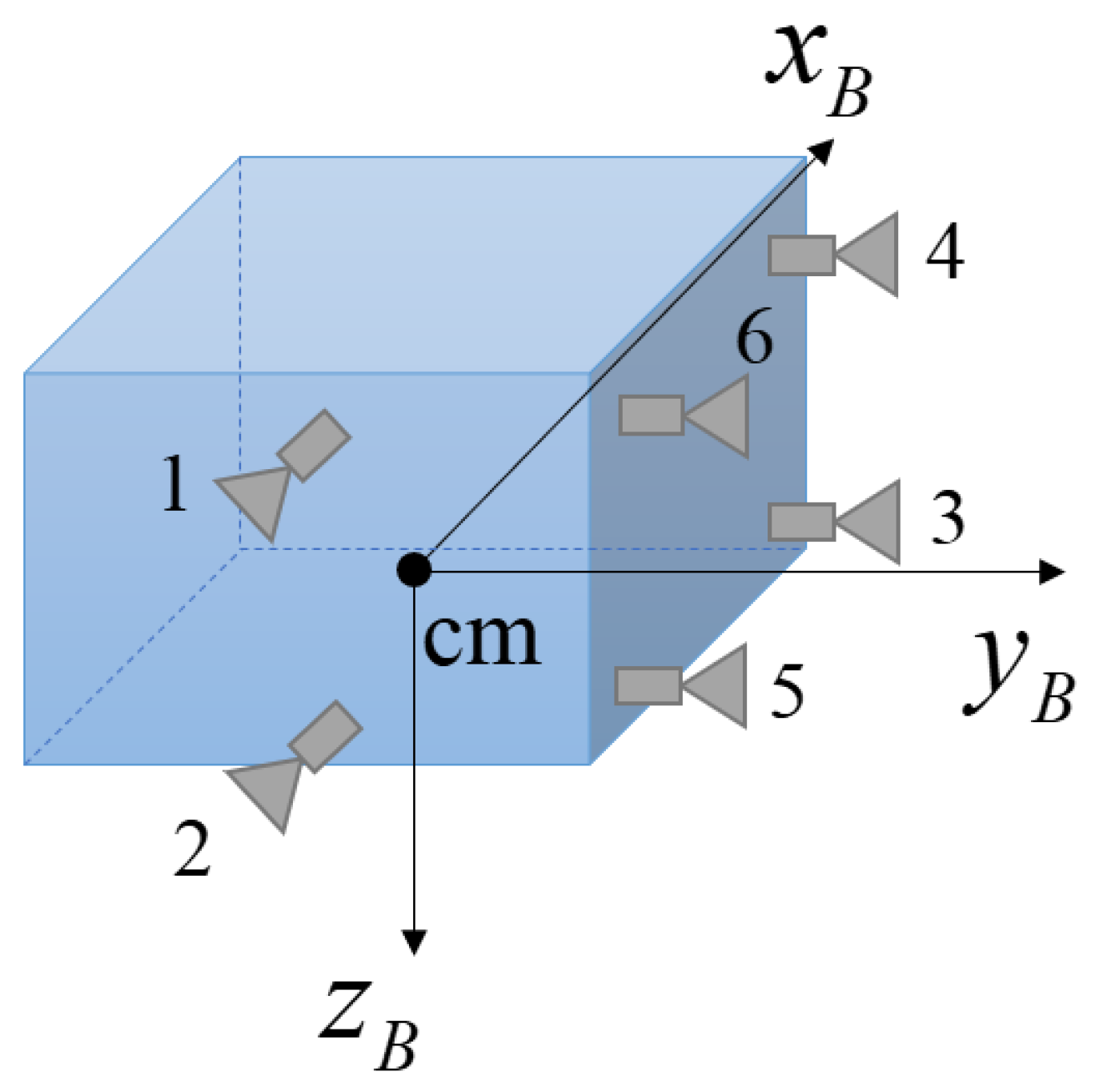
2.3.1. Thruster Modeling
2.3.2. Thruster Torque Command Generation with Pulse Width Modulation
| Algorithm 1: Thruster on-time setting algorithm |
2.3.3. Star Image Implementation under Thruster-Induced Disturbance
3. Extended Kalman Filter for Attitude Determination
3.1. Multiplicative Quaternion Formulation
4. Non-Gaussian Measurement Noise Modeling
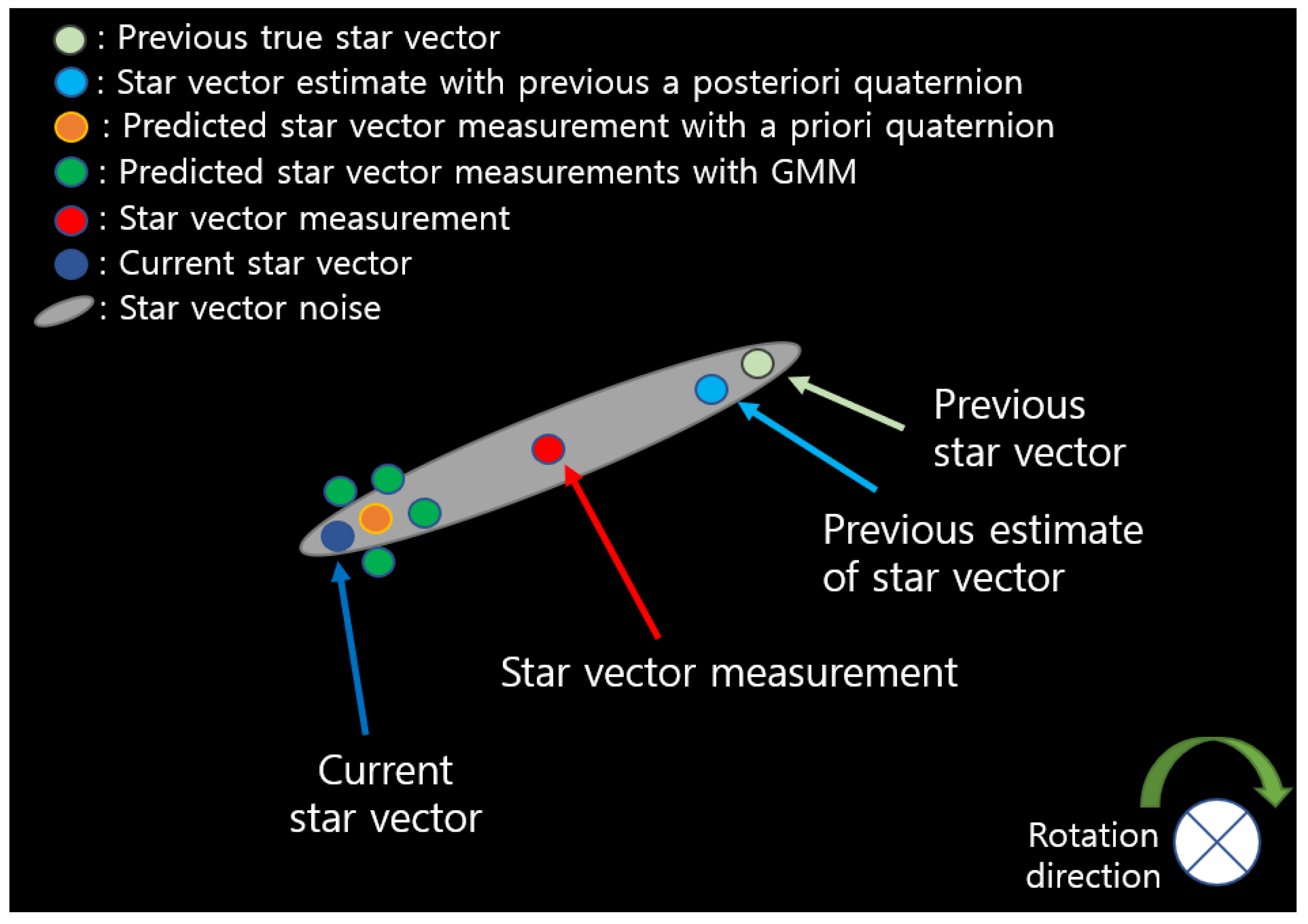
5. GMM-Based Adaptive Extended Kalman Filter
| Algorithm 2: GMM-EKF algorithm |
6. Simulation Study
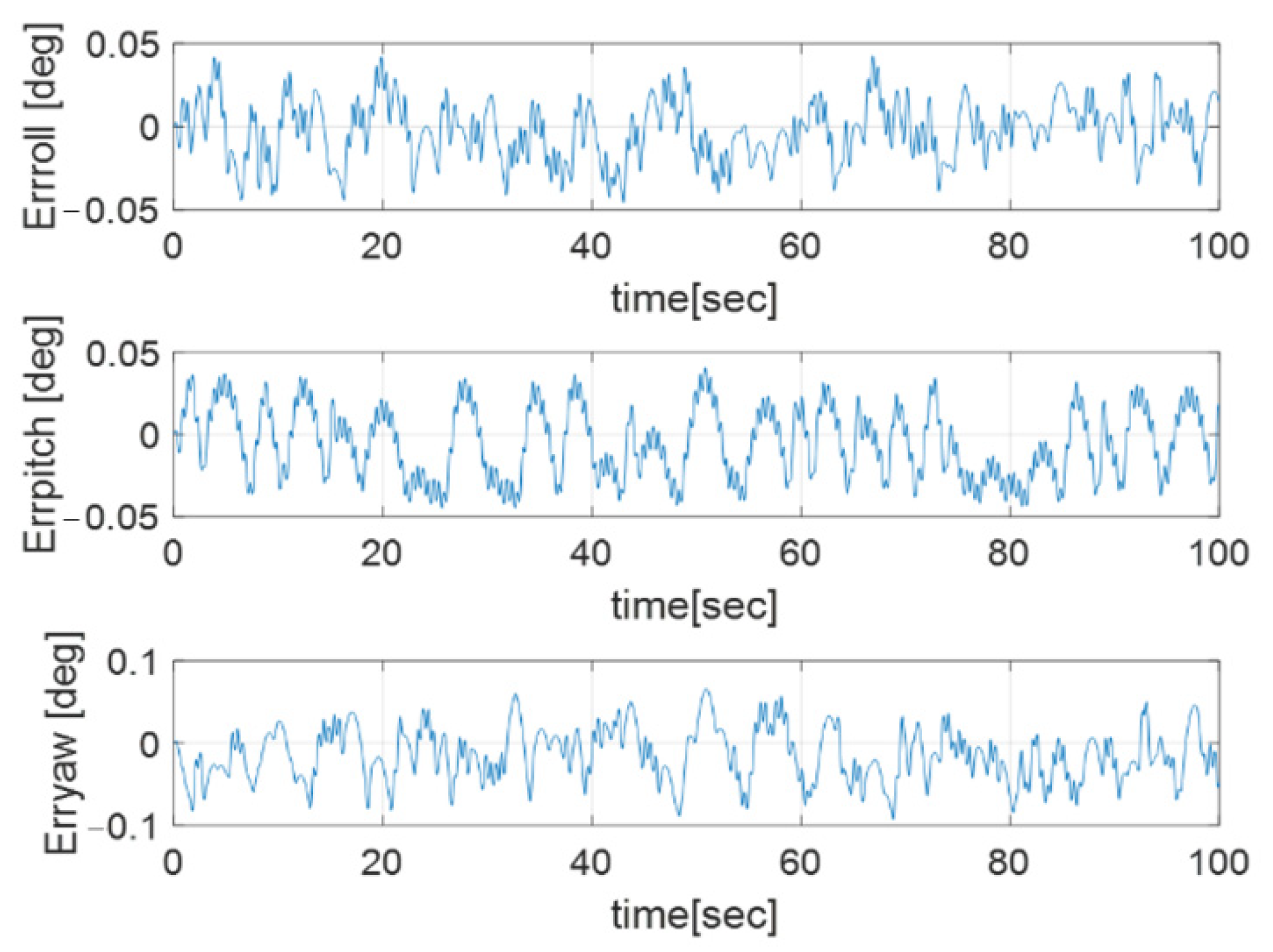
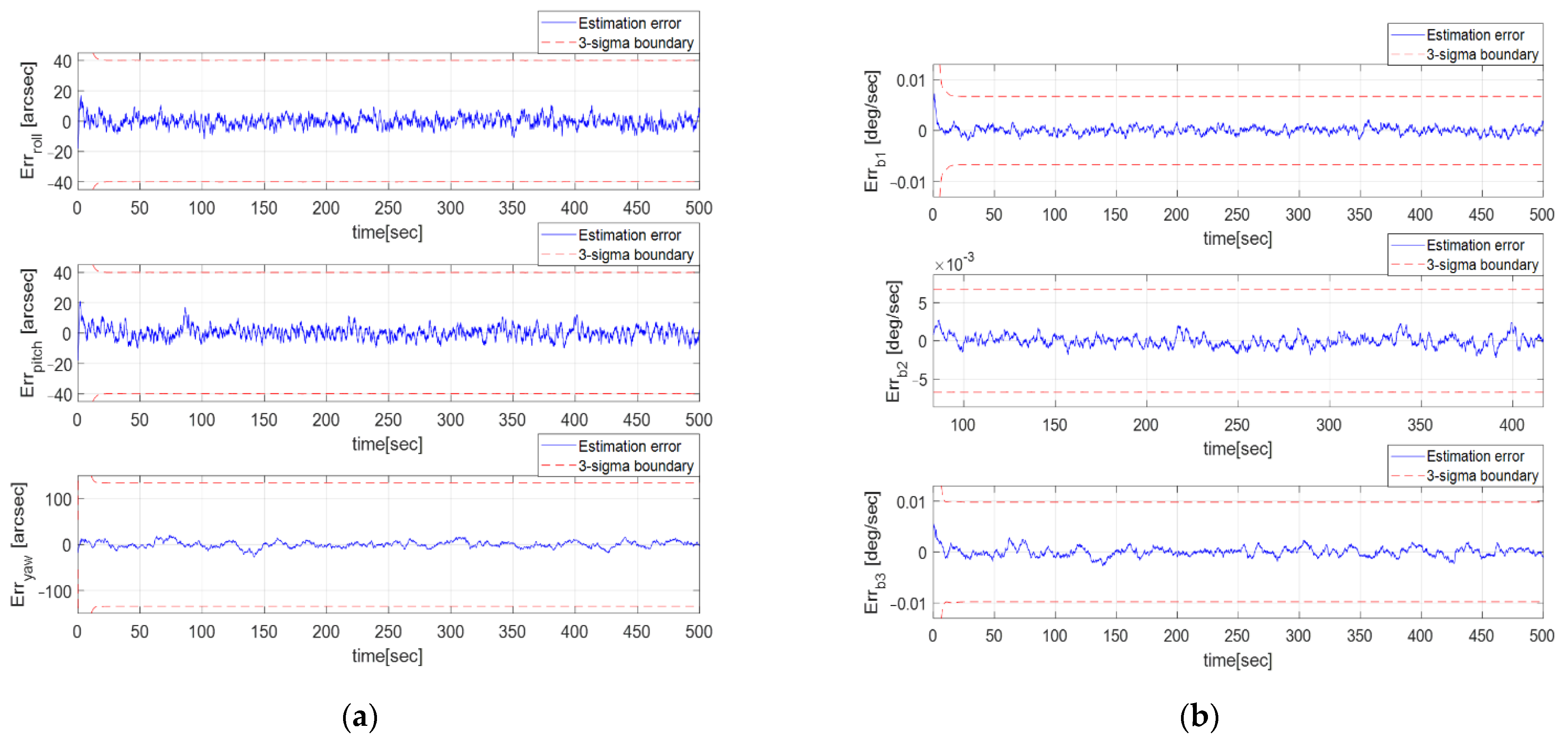
6.1. GMM-EKF Simulation Results
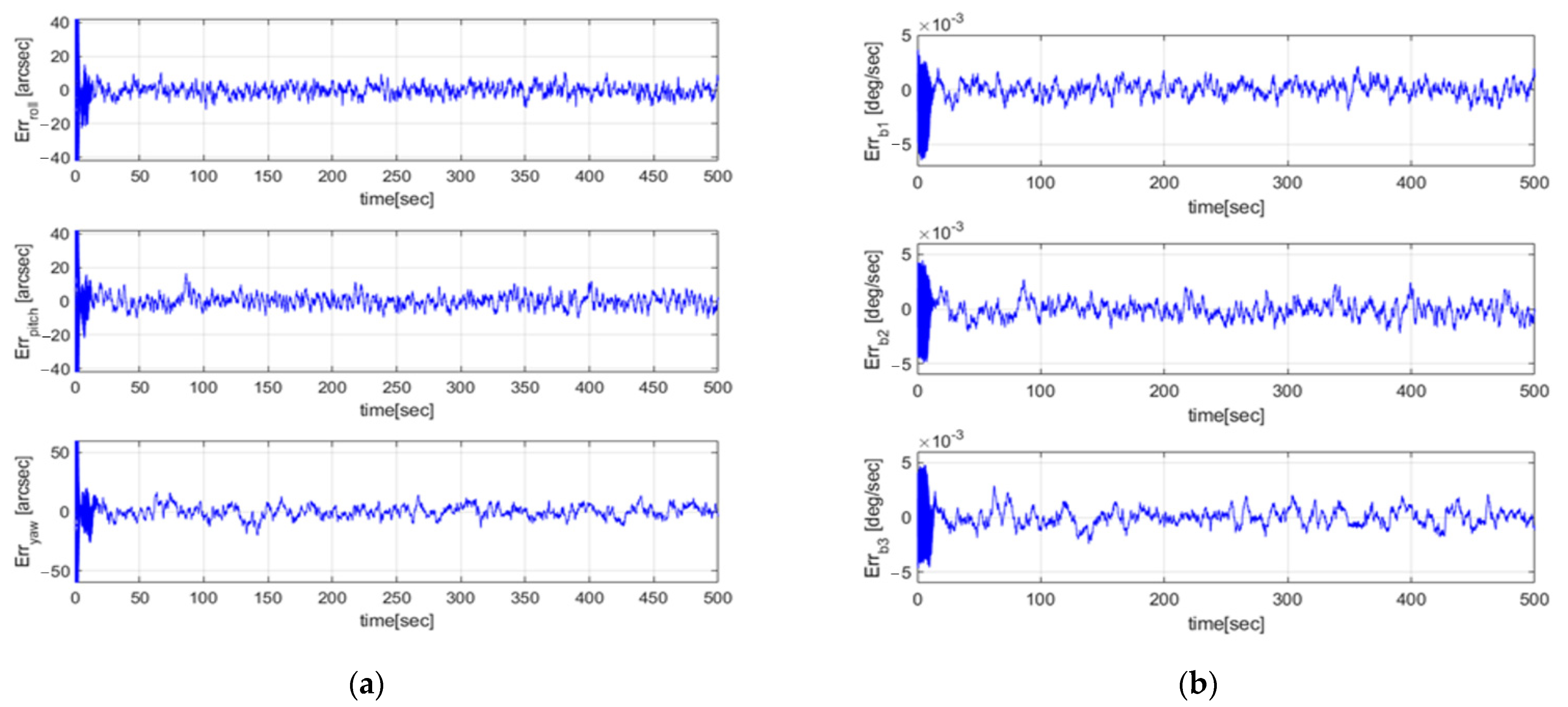
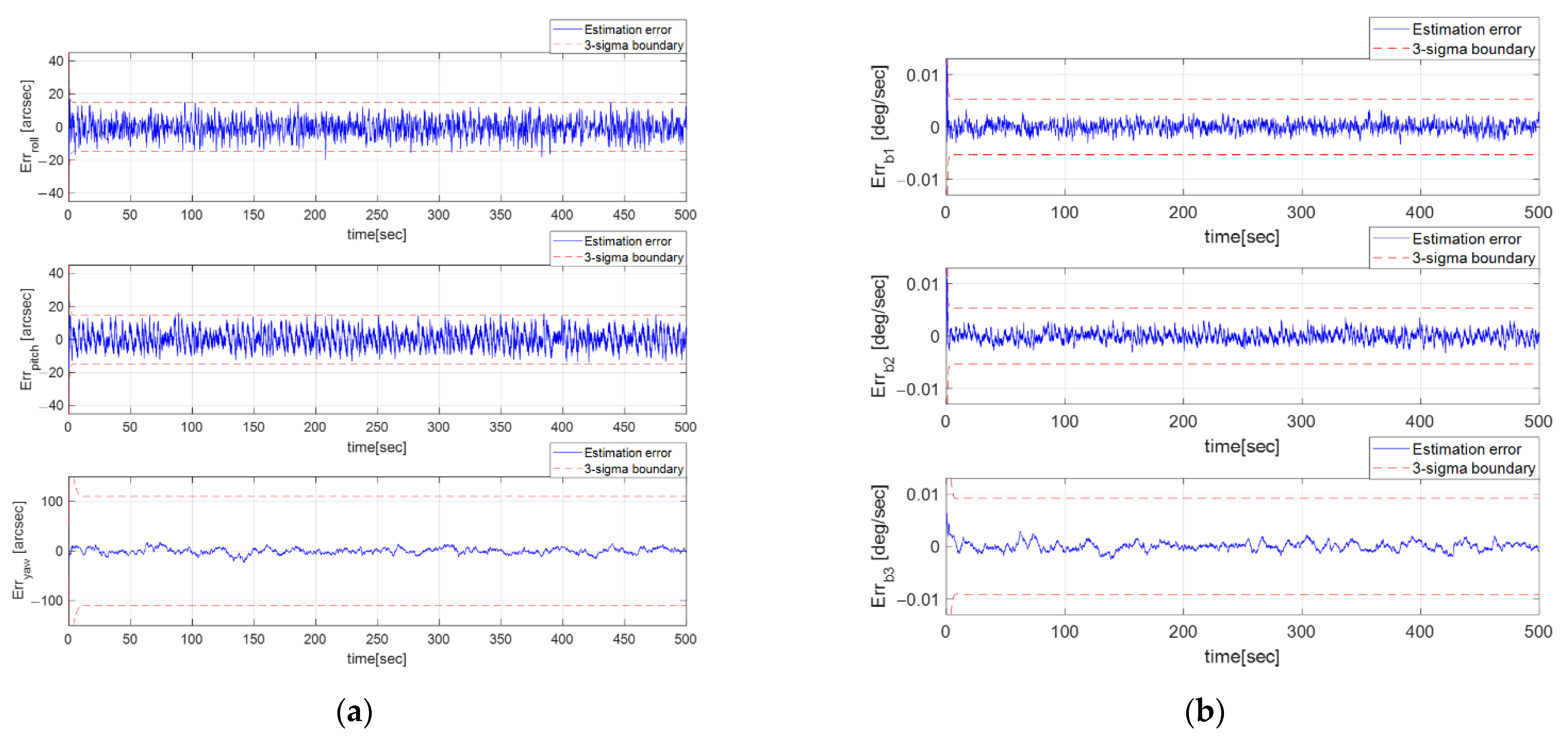
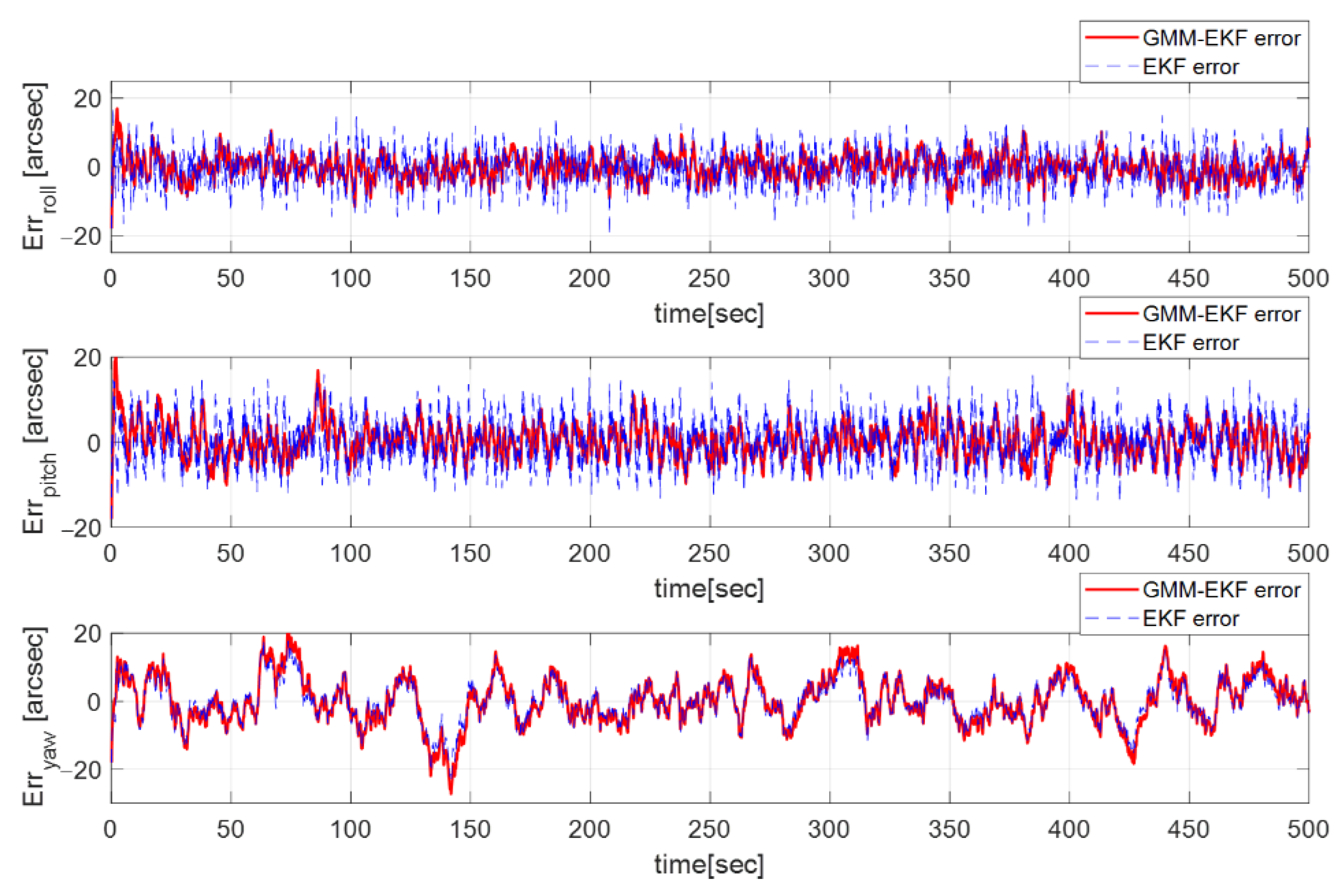
6.2. Comparison between GMM-EKF and EKF Performance
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Okhitina, A.S. Distribution of orbit correction thrusters for the geostationary satellite. AIP Conf. Proc. 2019, 2171, 060001. [Google Scholar]
- Lim, H.; Bang, H. Adaptive control for satellite formation flying under thrust misalignment. Acta Astronaut. 2009, 65, 112–122. [Google Scholar] [CrossRef]
- Gazzino, C.; Arzelier, D.; Louembet, C. Long-Term Electric-Propulsion Geostationary Station-Keeping via Integer Programming. J. Guid. Control Dyn. 2019, 42, 976–991. [Google Scholar] [CrossRef]
- Markley, F.; Bauer, F.; Femiano, M. Attitude Control System Conceptual Design for Geostationary Operational Environmental Satellite Spacecraft Series. J. Guid. Control Dyn. 1995, 18, 247–255. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; You, Z.; Wei, M. Motion-blurred star acquisition method of the star tracker under high dynamic conditions. Opt. Express 2013, 21, 20096. [Google Scholar] [CrossRef]
- Jun, Z.; Yuncai, H.; Li, W.; Da, L. Studies on dynamic motion compensation and positioning accuracy on star tracker. Appl. Opt. 2015, 54, 8417–8424. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X. Multiple blur of star image and the restoration under dynamic conditions. Acta Astronaut. 2011, 68, 1903–1913. [Google Scholar]
- Wang, S.; Zhang, S.; Ning, M.; Zhou, B. Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction. Sensors 2018, 18, 2662. [Google Scholar] [CrossRef]
- Yuan, H.; Lu, K.; Liu, Q. Motion modeling and blurred image simulation of the star tracker used for deep-space missions. J. Opt. Soc. Am. B 2022, 39, 2934–2943. [Google Scholar] [CrossRef]
- Delabie, T. Star Position Estimation Improvements for Accurate Star Tracker Attitude Estimation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Farrell, J. Attitude determination by Kalman filter. Automatica 1970, 6, 419–430. [Google Scholar] [CrossRef]
- Lefferts, E.J.; Markley, F.L.; Shuster, M.D. Kalman Filtering for Spacecraft Attitude Estimation. J. Guid. Control Dyn. 1982, 5, 417–429. [Google Scholar] [CrossRef]
- Hajiyev, C.; Soken, H. Adaptive Kalman Filtering. In Fault Tolerant Attitude Estimation for Small Satellites; CRC Press: Boca Raton, FL, USA, 2021; pp. 117–137. [Google Scholar]
- Kınataş, H.; Hacızade, C. Fault Tolerant Attitude Estimation for a Nanosatellite Using Adaptive Kalman Filter with Single Scaling Factor. J. Aeronaut. Space Technol. 2022, 15, 74–93. [Google Scholar]
- Plataniotis, K.N.; Androutsos, D.; Venetsanopoulos, N. Nonlinear Filtering of Non-Gaussian Noise. J. Intell. Robot. Syst. 1997, 19, 207–231. [Google Scholar] [CrossRef]
- Goswami, D.; Paley, D.A. Non-Gaussian Estimation and Dynamic Output Feedback Using the Gaussian Mixture Kalman Filter. J. Guid. Control Dyn. 2021, 44, 15–24. [Google Scholar] [CrossRef]
- Cabrera, D.; Utzmann, J.; Förstner, R. The adaptive Gaussian mixtures unscented Kalman filter for attitude determination using light curves. Adv. Space Res. 2023, 71, 2609–2628. [Google Scholar] [CrossRef]
- Liu, H.; Jia, H.; Li, X. Autonomous on-orbit calibration of a star tracker camera. Opt. Eng. 2011, 50, 023604. [Google Scholar]
- Liebe, C.C. Accuracy Performance of Star Trackers—A Tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Auer, L.; Altena, W.V. Digital Image Centering II. Astron. J. 1978, 83, 531–537. [Google Scholar] [CrossRef]
- Yan, J.; Jiang, J.; Zhang, G. Dynamic imaging model and parameter optimization for a star tracker. Opt. Express 2016, 24, 5961–5983. [Google Scholar] [CrossRef]
- Wang, H.; Xu, E.; Li, Z.; Li, J.; Qin, T. Gaussian Analytic Centroiding Method of Star Image of Star Tracker. Adv. Space Res. 2015, 56, 2196–2205. [Google Scholar] [CrossRef]
- Sidi, M.J. Reaction Thruster Attitude Control. In Spacecraft Dynamics & Control, A Practical Engineering Approach; Cambridge University Press: Cambridge, UK, 1997; pp. 260–290. [Google Scholar]
- Bong, W.; Weiss, H.; Arapostathis, A. Quarternion feedback regulator for spacecraft eigenaxis rotations. J. Guid. Control Dyn. 1989, 12, 375–380. [Google Scholar]
- Crassidis, J.L.; Junkins, J.L. Estimation of Dynamics Systems: Applications. In Optimal Estimation of Dynamic Systems, 2nd ed.; CRC Press: Florida, UK, 2012; pp. 419–427. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Thruster Index () | Elevation | Azimuth | Thruster Level | Sampling Rate | ||
|---|---|---|---|---|---|---|
| #1 | (−1, 0, −0.5) m | , | 3 N | 4 Hz | ||
| #2 | (−1, 0, 0.5) m | |||||
| #3 | (1, 1, 0.5) m | |||||
| #4 | (1, 1, −0.5) m | |||||
| #5 | (−1, 1, 0.5) m | |||||
| #6 | (−1, 1, −0.5) m |
| Pixel Array Size | Focal Length | Pixel Size | Field of View | Exposure Time | Magnitude Threshold | Radius of Gaussian PSF |
|---|---|---|---|---|---|---|
| 1024 1024 | 76.08 mm | 13 | 5 | 3.8 pixel |
| Moment of Inertia | Damping Ratio | Settling Time | Initial Angular Velocity | Initial Attitude | Target Attitude |
|---|---|---|---|---|---|
| [500, 500, 500] | 1 | 2.5 s |
| Angle Random Walk | Rate Random Walk | Initial Bias | Update Frequency |
|---|---|---|---|
| 0.001 | 0.05 | [0.0004, −0.0003, 0.0001] | 100 Hz |
| Measurement Noise Matrix | Update Frequency | ||
|---|---|---|---|
| 100 Hz | −8 arcsec | (For three axes) | |
| −4 arcsec | |||
| 4 arcsec | |||
| 8 arcsec | |||
| Euler Angle | Bias | Covariance |
|---|---|---|
| 0.005 [1,1,1] | 0.0042[1,1,1] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, T.; Zewge, N.S.; Bang, H.; Yoon, H. GMM-Based Adaptive Extended Kalman Filter Design for Satellite Attitude Estimation under Thruster-Induced Disturbances. Sensors 2023, 23, 4212. https://doi.org/10.3390/s23094212
Kim T, Zewge NS, Bang H, Yoon H. GMM-Based Adaptive Extended Kalman Filter Design for Satellite Attitude Estimation under Thruster-Induced Disturbances. Sensors. 2023; 23(9):4212. https://doi.org/10.3390/s23094212
Chicago/Turabian StyleKim, Taeho, Natnael S. Zewge, Hyochoong Bang, and Hyosang Yoon. 2023. "GMM-Based Adaptive Extended Kalman Filter Design for Satellite Attitude Estimation under Thruster-Induced Disturbances" Sensors 23, no. 9: 4212. https://doi.org/10.3390/s23094212
APA StyleKim, T., Zewge, N. S., Bang, H., & Yoon, H. (2023). GMM-Based Adaptive Extended Kalman Filter Design for Satellite Attitude Estimation under Thruster-Induced Disturbances. Sensors, 23(9), 4212. https://doi.org/10.3390/s23094212