Seismic Beacon—A New Instrument for Detection of Changes in Rock Massif


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
- Time changes in the velocity of propagation of seismic waves;
- Time changes in seismic wave attenuation;
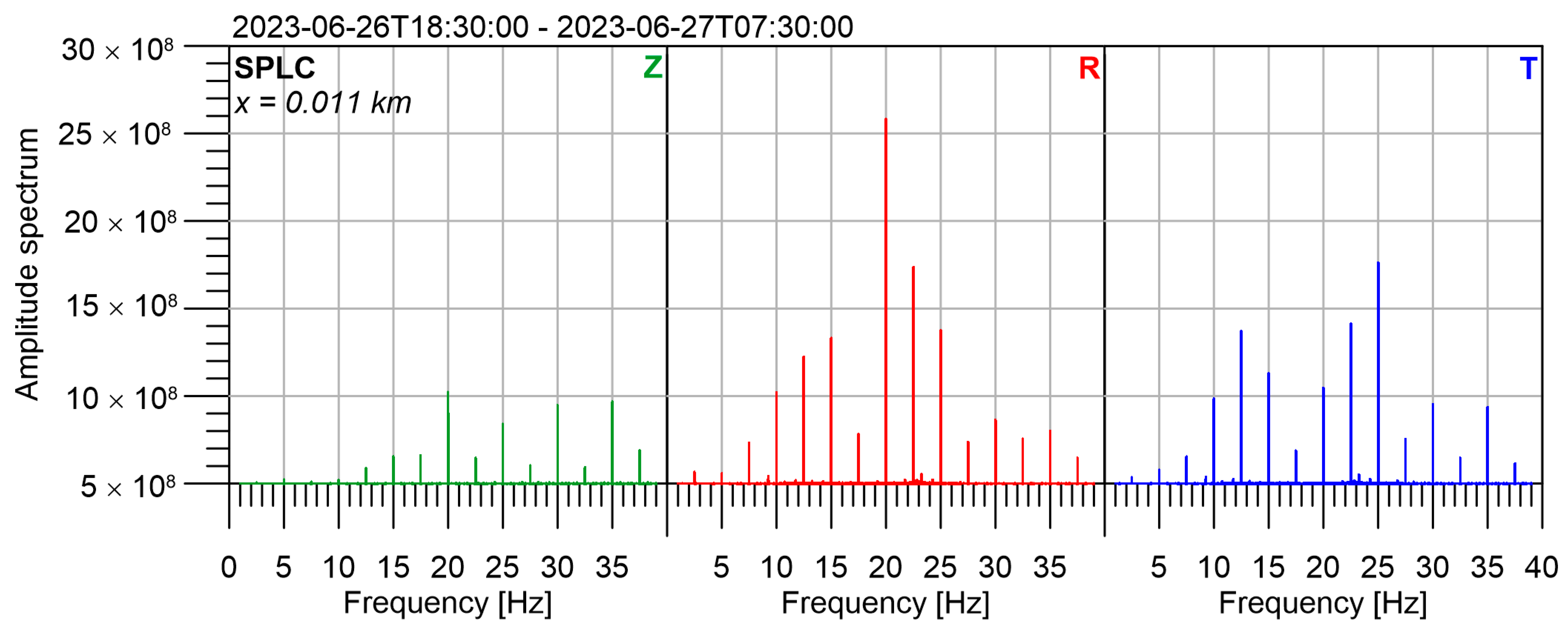
- Formation of higher harmonic frequencies.
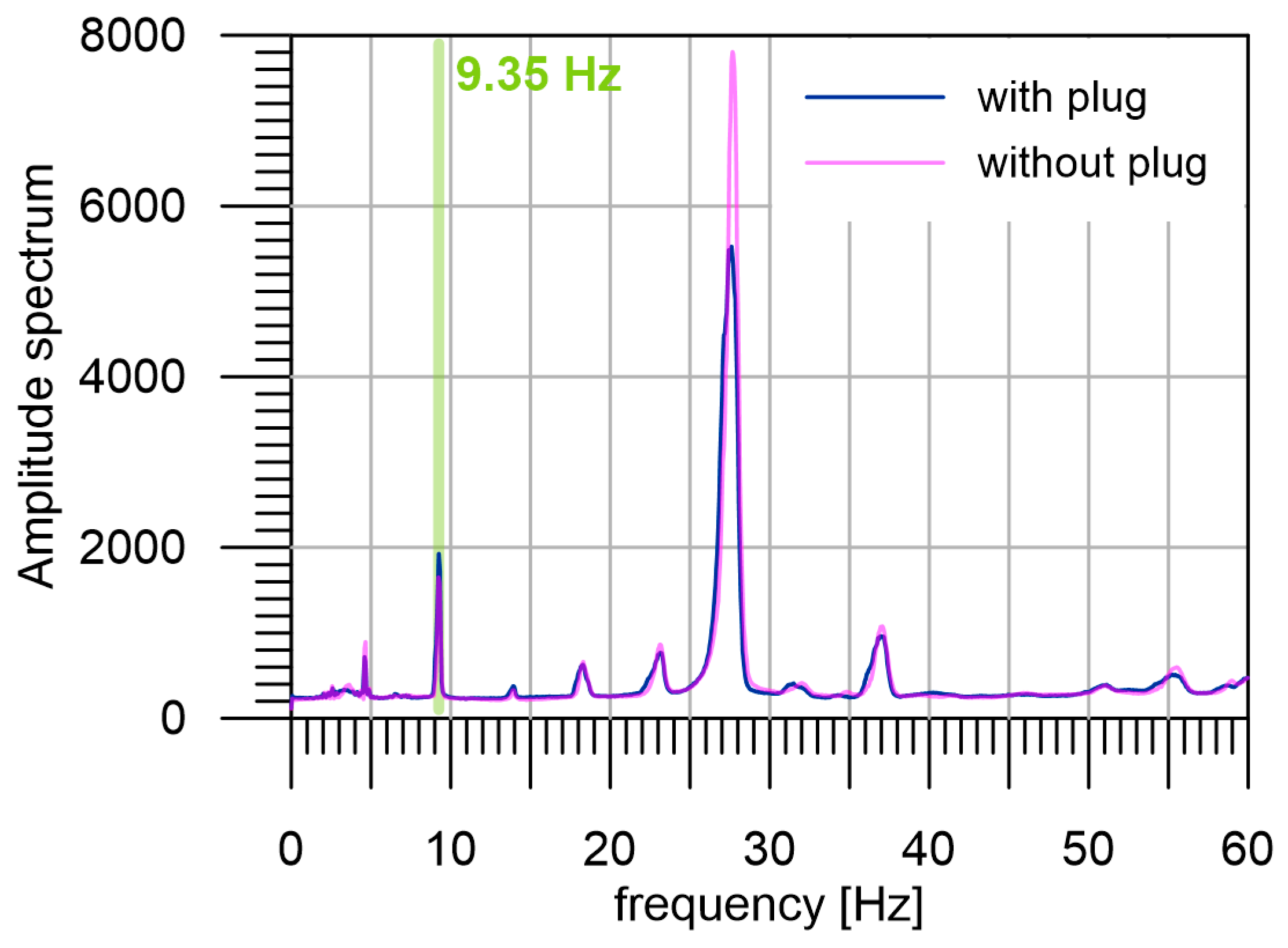
3. Results
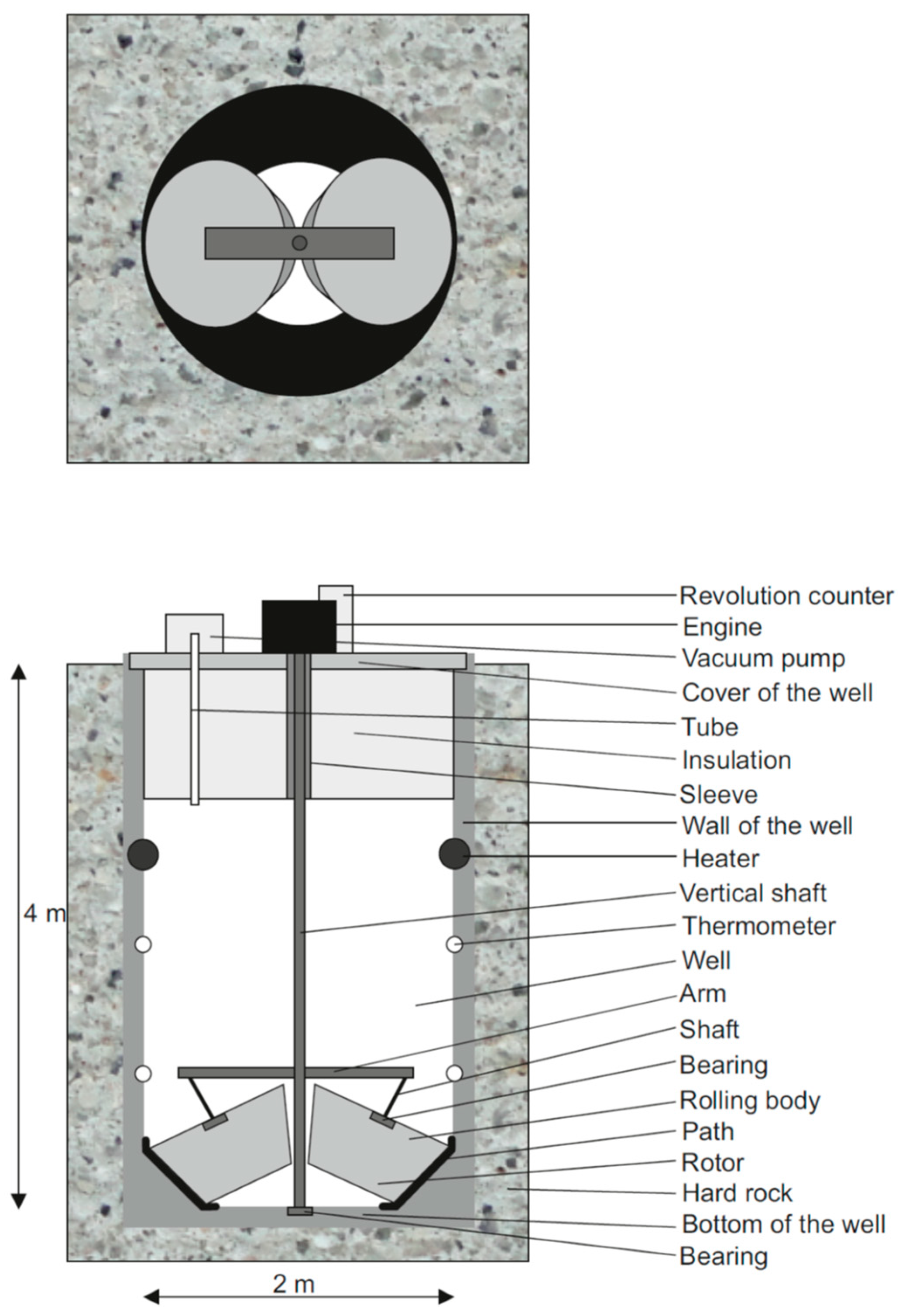
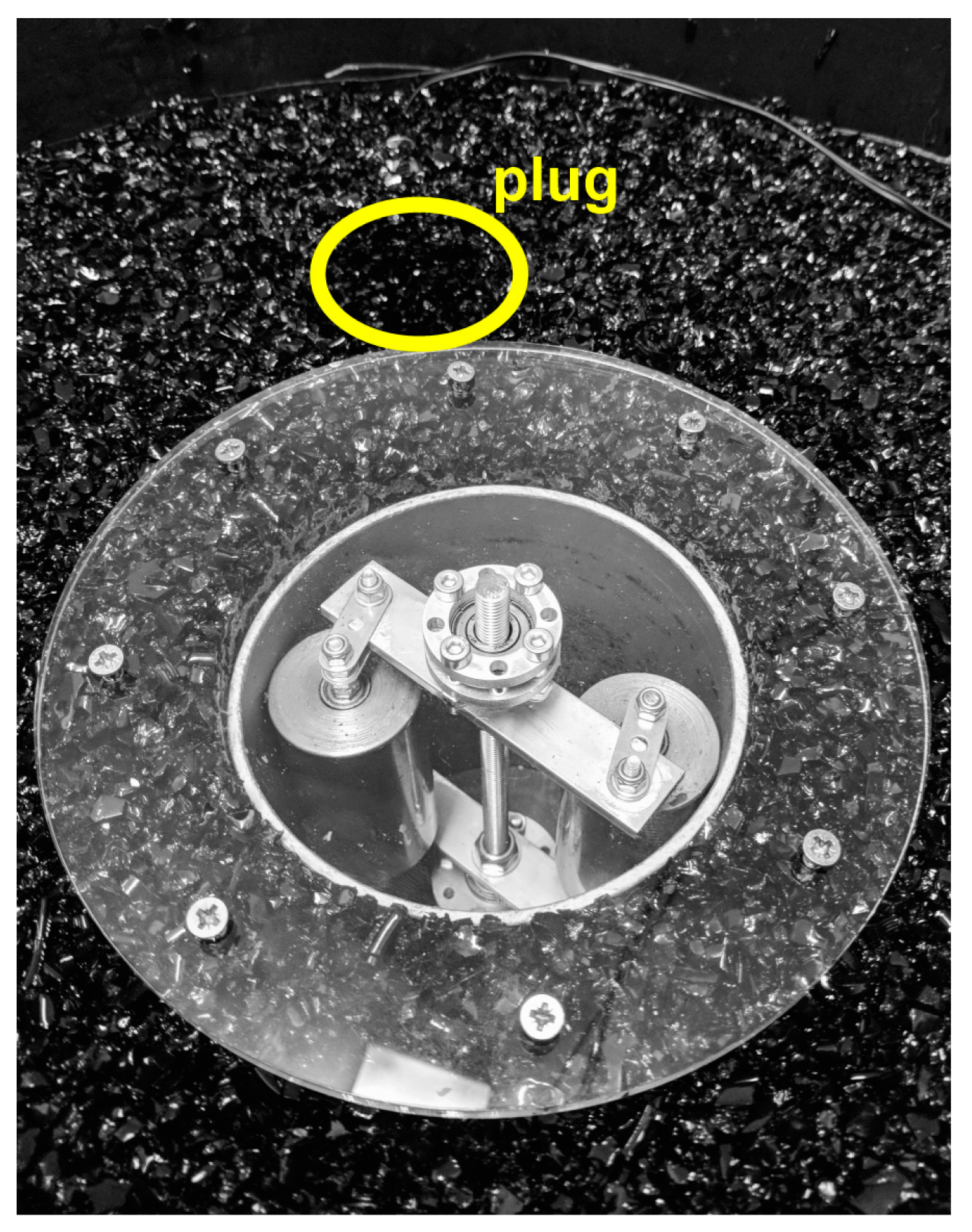
3.1. Laboratory Model of Seismic Beacon
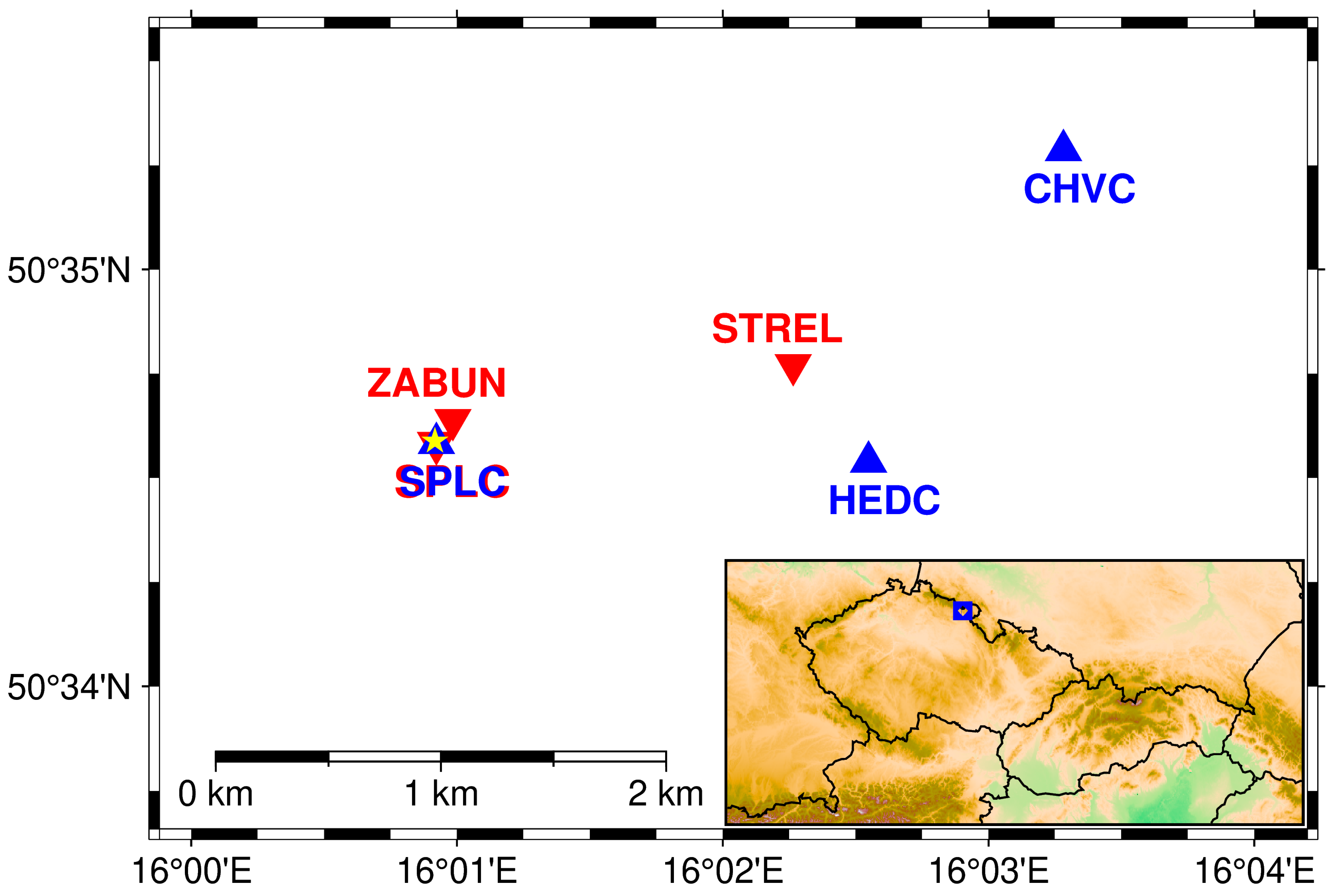
3.2. Field Experiments
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, H.; Zhang, Z.; Liu, E. Non-linear seismic wave propagation in anisotropic media using the flux-corrected transport technique. Geophys. J. Int. 2006, 165, 943–956. [Google Scholar] [CrossRef]
- Frehner, M.; Schmalholz, M.S.; Podladchikov, Y. Spectral modification of seismic waves propagating through solids exhibiting a resonance frequency: A 1-D coupled wave propagation–oscillation model. Geophys. J. Int. 2009, 176, 589–600. [Google Scholar] [CrossRef]
- Beresnev, I.A.; Nikolaev, A.V. Experimental investigations of nonlinear seismic effects. Phys. Earth Planet. Inter. 1988, 50, 83–87. [Google Scholar] [CrossRef]
- Beresnev, I.A.; Nikolaevskiy, V.N. A model for nonlinear seismic waves in a medium with instability. Phys. D Nonlinear Phenom. 1993, 66, 1–6. [Google Scholar] [CrossRef]
- Beresnev, I.A.; Wen, K.L. Nonlinear soil response—A reality? Bull. Seismol. Soc. Am. 1996, 86, 1964–1978. [Google Scholar] [CrossRef]
- Nikolaev, A.V. Problems of nonlinear seismology. Phys. Earth Planet. Inter. 1988, 50, 1–7. [Google Scholar] [CrossRef]
- Yurikov, A.; Gurevich, B.; Tertyshnikov, K.; Lebedev, M.; Isaenkov, R.; Sidenko, E.; Yavuz, S.; Glubokovskikh, S.; Shulakova, V.; Freifeld, B.; et al. Evidence of Nonlinear Seismic Effects in the Earth from Downhole Distributed Acoustic Sensors. Sensors 2022, 22, 9382. [Google Scholar] [CrossRef]
- De Fazio, T.L.; Aki, K.; Alba, J. Solid earth tide and observed change in the in situ seismic velocity. J. Geophys. Res. 1973, 78, 1319–1322. [Google Scholar] [CrossRef]
- Wu, C.Q.; Peng, Z.G.; Dominic, A. Temporal changes in site response associated with the strong ground motion of the 2004 Mw 6.6 mid-niigata earthquake sequences in Japan. Bull. Seismol. Soc. Am. 2009, 99, 3487–3495. [Google Scholar] [CrossRef]
- Kubo, H.; Nakamura, T.; Suzuki, W.; Dhakal, Y.P.; Kimura, T.; Kunugi, T.; Takahashi, N.; Aoi, S. Groundmotion characteristics and nonlinear soil response observed by DONET1 seafloor observation network during the 2016 southeast off-mie, Japan, earthquake. Bull. Seismol. Soc. Am. 2019, 109, 976–986. [Google Scholar] [CrossRef]
- Schwardt, M.; Pilger, C.; Gaebler, P.; Hupe, P.; Ceranna, L. Natural and Anthropogenic Sources of Seismic, Hydroacoustic, and Infrasonic Waves: Waveforms and Spectral Characteristics (and Their Applicability for Sensor Calibration). Surv. Geophys. 2022, 43, 1265–1361. [Google Scholar] [CrossRef] [PubMed]
- Yamaoka, K.; Kunitomo, T.; Miyakawa, K.; Kobayashi, K.; Kumazawa, M. A trial for monitoring temporal variation of seismic velocity using an ACROSS system. Island Arc 2001, 10, 336–347. [Google Scholar] [CrossRef]
- Ikuta, R.; Yamaoka, K.; Miyakawa, K.; Takahiro, K.; Mineo, K. Continuous monitoring of propagation velocity of seismic wave using ACROSS. Geophys. Res. Lett. 2002, 29, 1627. [Google Scholar] [CrossRef]
- Ikuta, R.; Yamaoka, K. Temporal variation in the shear wave anisotropy detected using the Accurately Controlled Routinely Operated Signal System (ACROSS). J. Geophys. Res. 2004, 109, B09305. [Google Scholar] [CrossRef]
- Saiga, A.; Yamaoka, K.; Kunitomo, T.; Watanabe, T. Continuous observation of seismic wave velocity and apparent velocity using a precise seismic array and ACROSS seismic source. Earth Planets Space 2006, 58, 993–1005. [Google Scholar] [CrossRef]
- Yamaoka, K.; Miyamachi, H.; Watanabe, T.; Kunitomo, T.; Michishita, T.; Ikuta, R.; Iguchi, M. Active monitoring at an active volcano: Amplitude-distance dependence of ACROSS at Sakurajima Volcano, Japan. Earth Planets Space 2014, 66, 32. [Google Scholar] [CrossRef]
- Tsuji, S.; Yamaoka, K.; Ikuta, R. Temporal change in seismic wave attenuation using highly stable vibration sources. Earth Planets Space 2022, 74, 15. [Google Scholar] [CrossRef]
- Brokešová, J.; Málek, J. Comparative Measurements of Local Seismic Rotations by Three Independent Methods. Sensors 2020, 20, 5679. [Google Scholar] [CrossRef]
- Bernauer, F.; Behnen, K.; Wassermann, J.; Egdorf, S.; Igel, H.; Donner, S.; Stammler, K.; Hoffmann, M.; Edme, P.; Sollberger, D.; et al. Rotation, Strain, and Translation Sensors Performance Tests with Active Seismic Sources. Sensors 2021, 21, 264. [Google Scholar] [CrossRef]
- Ringdal, F.; Mykkeltveit, S.; Fyen, J.; Kværna, T. Spectral analysis of seismic signals and noise recorded at the NORESS high-frequency element. Phys. Earth Planet. Inter. 1990, 63, 243–251. [Google Scholar] [CrossRef]
- Málek, J.; Kolínský, P.; Štrunc, J.; Valenta, J. Generalized average of signals (GAS)—A new method for detection of very weak waves in seismograms. Acta Geodyn. Geomater. 2007, 4, 5–10. [Google Scholar]
- Shapiro, N.M.; Campillo, M.; Stehly, L.; Ritzwoller, M.H. High-resolution surface-wave tomography from ambient seismic noise. Science 2005, 307, 1615–1618. [Google Scholar] [CrossRef] [PubMed]
- Schippkus, S.; Zigone, D.; Bokelmann, G.; the AlpArray Working Group. Ambient-noise tomography of the wider Vienna Basin region. Geophys. J. Int. 2018, 215, 102–117. [Google Scholar] [CrossRef]
- Kvapil, J.; Plomerová, J.; Kampfová Exnerová, H.; Babuška, V.; Hetényi, G.; AlpArray Working Group. Transversely isotropic lower crust of Variscan central Europe imaged by ambient noise tomography of the Bohemian Massif. Solid Earth 2021, 12, 1051–1074. [Google Scholar] [CrossRef]
- Szanyi, G.; Gráczer, Z.; Balázs, B.; Kovács, I.J. The transition zone between the Eastern Alps and the Pannonian basin imaged by ambient noise tomography. Tectonophysics 2021, 805, 228770. [Google Scholar] [CrossRef]
- Petrescu, L.; Borleanu, F.; Placinta, A.O. Seismic structure of a Tethyan back-arc: Transdimensional ambient noise tomography of the Black Sea lithosphere. Phys. Earth Planet. Inter. 2022, 325, 106854. [Google Scholar] [CrossRef]
- Kolínský, P.; Valenta, J.; Gaždová, R. Seismicity, groundwater level variations and Earth tides in the Hronov-Poříčí Fault Zone, Czech Republic. Acta Geodyn. Geomater. 2012, 9, 191–209. [Google Scholar]
- Málek, J.; Brož, M.; Stejskal, V.; Štrunc, J. Local seismicity at the Hronov-Poříčí Fault (Eastern Bohemia). Acta Geodyn. Geomater. 2008, 5, 171–175. [Google Scholar]
- Valenta, J.; Stejskal, V.; Štěpančíková, P. Tectonic pattern of the Hronov-Poříčí Trough as seen from pole-dipole geoelectrical measurements. Acta Geodyn. Geomater. 2008, 5, 185–195. [Google Scholar]
- Meier, U.; Shapiro, N.M.; Brenguier, F. Detecting seasonal variations in seismic velocities within Los Angeles basin from correlations of ambient seismic noise. Geophys. J. Int. 2010, 181, 985–996. [Google Scholar] [CrossRef]
- Wang, Q.-Y.; Brenguier, F.; Campillo, M.; Lecointre, A.; Takeda, T.; Aoki, Y. Seasonal crustal seismic velocity changes throughout Japan. J. Geophys. Res. Solid Earth 2017, 122, 7987–8002. [Google Scholar] [CrossRef]
- Andajani, R.D.; Tsuji, T.; Snieder, R.; Ikeda, T. Spatial and temporal influence of rainfall on crustal pore pressure based on seismic velocity monitoring. Earth Planets Space 2020, 72, 177. [Google Scholar] [CrossRef]
- Suzuki, R.; Yamaoka, K.; Tsuji, S.; Watanabe, T. Ground water-induced changes in velocities of P and S waves (Vp and Vs) measured using an accurately controlled seismic source. Earth Planets Space 2021, 73, 152. [Google Scholar] [CrossRef]
- Yamamura, K.; Sano, O.; Utada, H.; Takei, Y.; Nakao, S.; Fukao, Y. Long-term observation of in situ seismic velocity and attenuation. J. Geophys. Res. Solid Earth 2003, 108, 1–15. [Google Scholar] [CrossRef]
- Karageorgi, E.; Clymer, R.; McEvilly, T.V. Seismological studies at Parkfield. Search for temporal variations in wave propagation using Vibroseis. Bull. Seism. Soc. Am. 1992, 82, 1338–1415. [Google Scholar] [CrossRef]
- Zhukov, A.P.; Loginov, K.I.; Shneerson, M.B.; Shulakova, V.E.; Kharisov, R.G.; Ekimenko, V.A. Nonlinear properties of vibrator generated wavefields and their application to hydrocarbon detection. Lead. Edge 2007, 26, 1395–1402. [Google Scholar] [CrossRef]
- Campman, X.H.; Kuvshinov, B.N.; Smit, T.H.J. Combined-Harmonic Analysis of Seismic Data Acquired with Two Vibrators Driven at Different Frequencies; European Association of Geoscientists & Engineers: Houten, The Netherlands, 2012. [Google Scholar]
- Tsuji, S.; Yamaoka, K.; Ikuta, R.; Kunitomo, T.; Watanabe, T.; Yoshida, Y.; Katsumata, A. Secular and coseismic changes in S-wave velocity detected using ACROSS in the Tokai region. Earth Planets Space 2018, 70, 146. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lukešová, R.; Málek, J. Seismic Beacon—A New Instrument for Detection of Changes in Rock Massif. Sensors 2024, 24, 234. https://doi.org/10.3390/s24010234
Lukešová R, Málek J. Seismic Beacon—A New Instrument for Detection of Changes in Rock Massif. Sensors. 2024; 24(1):234. https://doi.org/10.3390/s24010234
Chicago/Turabian StyleLukešová, Renata, and Jiří Málek. 2024. "Seismic Beacon—A New Instrument for Detection of Changes in Rock Massif" Sensors 24, no. 1: 234. https://doi.org/10.3390/s24010234
APA StyleLukešová, R., & Málek, J. (2024). Seismic Beacon—A New Instrument for Detection of Changes in Rock Massif. Sensors, 24(1), 234. https://doi.org/10.3390/s24010234