


An Adaptive Unscented Kalman Filter for the Estimation of the Vehicle Velocity Components, Slip Angles, and Slip Ratios in Extreme Driving Manoeuvres


 and
and
Abstract
:1. Introduction
- Adaptive dynamic model-based Kalman filters that concurrently vary the process and measurement noise covariances through vehicle-dynamics-derived heuristics. These should be defined as a function of relevant error variables, based on the difference between the measured and estimated outputs, with the specific scope of enhancing performance in highly dynamic conditions, including significant longitudinal tyre slip variations induced by wheel torque or tyre–road friction transients. These scenarios, unlike the current adaptive implementations, require internal models accounting for the wheel dynamics.
- The assessment of the sideslip angle, velocity and tyre slip estimation performance benefit of adaptive Kalman filters in both high- and low-friction conditions, including -jump tests, and manoeuvres with very high levels of longitudinal and lateral slip.
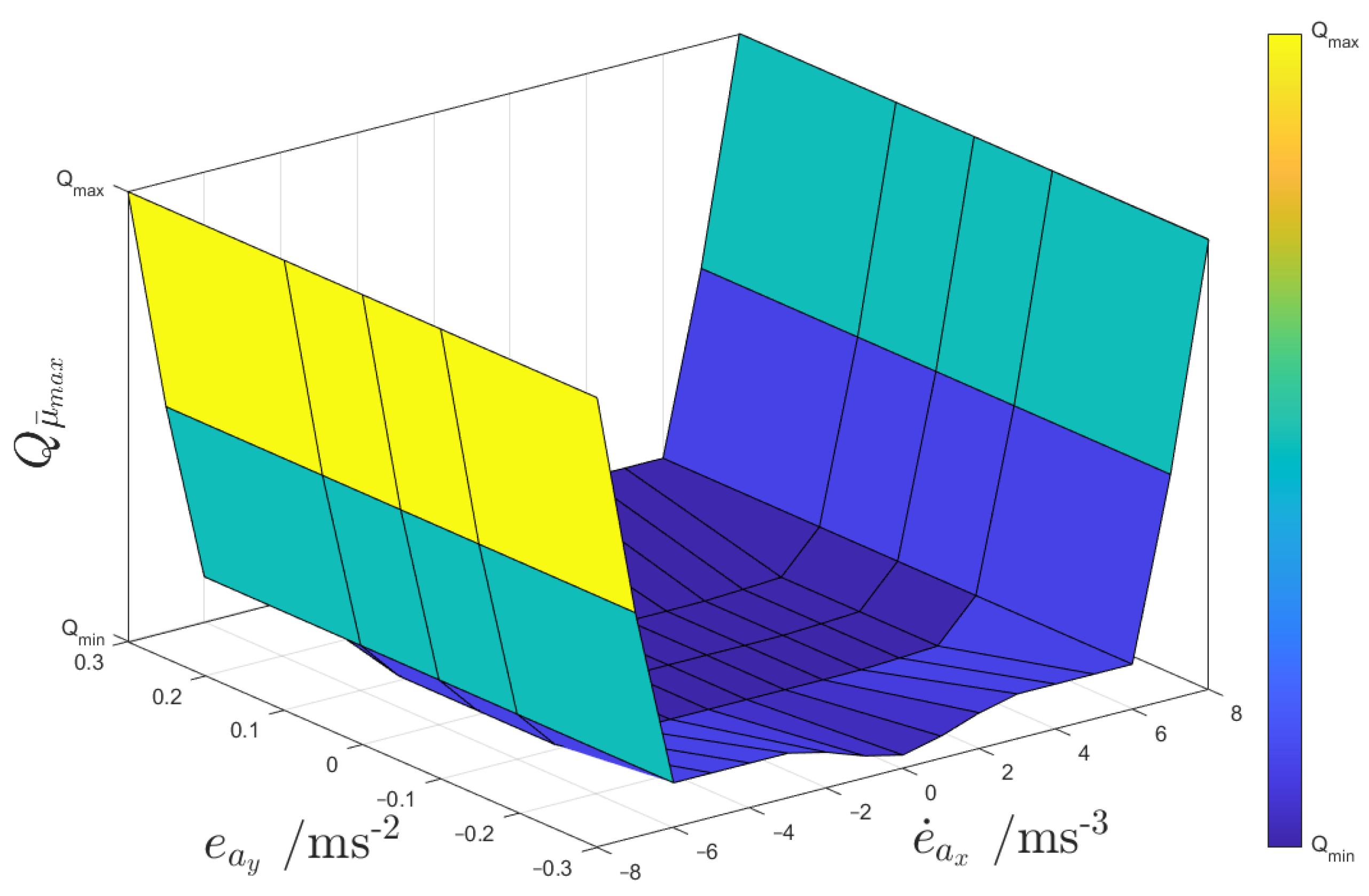
- A UKF implementation with vehicle-dynamics-based adaptive formulations for the following: (a) the wheel speed measurement covariances, based on variables that are robustly representative of the longitudinal tyre slip condition; (b) the tyre–road friction coefficient process noise covariance, based on error variables depending on the longitudinal and lateral accelerations; and (c) the process noise covariances of the yaw rate and the longitudinal and lateral velocity components, based on the estimation errors with respect to the available relevant measurements.
- The experimental validation of the UKF with adaptive covariance matrices, referred to as UKF ACM, along extreme high-friction manoeuvres, including significant longitudinal and lateral accelerations.
- The validation of UKF ACM through a high-fidelity and experimentally validated model, in conditions with very low tyre–road friction, including -jumps.
- The comparison of UKF ACM with a baseline UKF with fixed covariance values that are well calibrated.
2. Case Study Vehicle and Associated Models
2.1. Reference Vehicle
2.2. High-Fidelity Vehicle Simulation Model
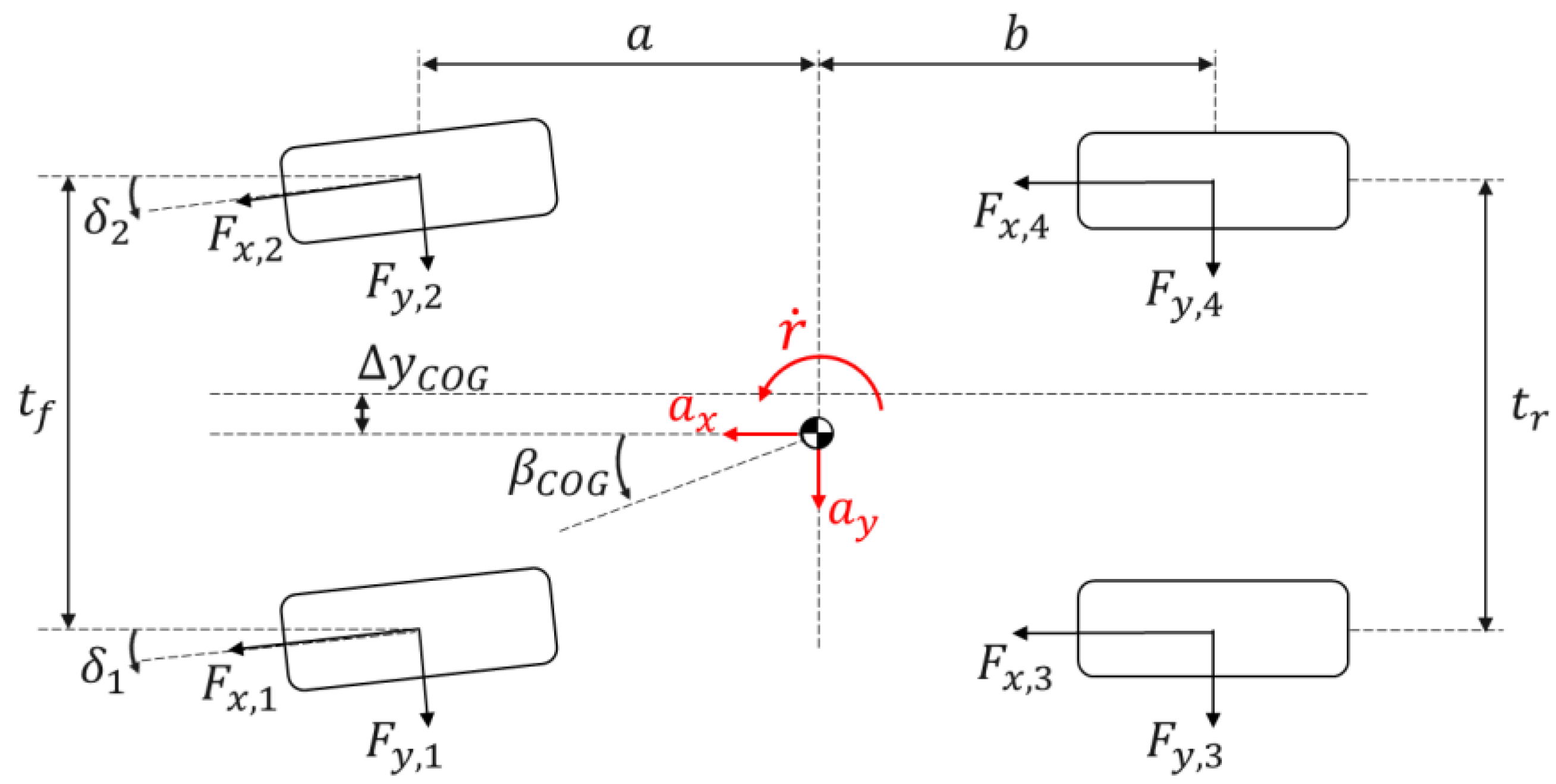
2.3. Internal Model of the Filters
- Longitudinal force balance
- Lateral force balance
- Yaw moment balance
- Wheel moment balancewhere the increasing values of the integer , with 1,…, 4, used as a subscript, refer to the front left, front right, rear left, and rear right vehicle corners; and are the longitudinal and lateral accelerations; and are the longitudinal and lateral components of the vehicle velocity; and are the longitudinal and lateral tyre forces; is the steering angle of the -th wheel; is the yaw rate; is the aerodynamic drag force; indicates the lateral position of the centre of gravity with respect to the plane of symmetry of the vehicle; is the tyre self-aligning moment; is the equivalent mass moment of inertia of the wheel; is the angular wheel acceleration; is the electric motor torque level referred to the -th corner, computed from the measured motor current, the gearbox and final drive ratios, as well as the respective efficiencies; indicates the braking torque at the individual corner, which is estimated from the measured tandem master cylinder pressure; is the laden tyre radius; and is the rolling resistance moment.
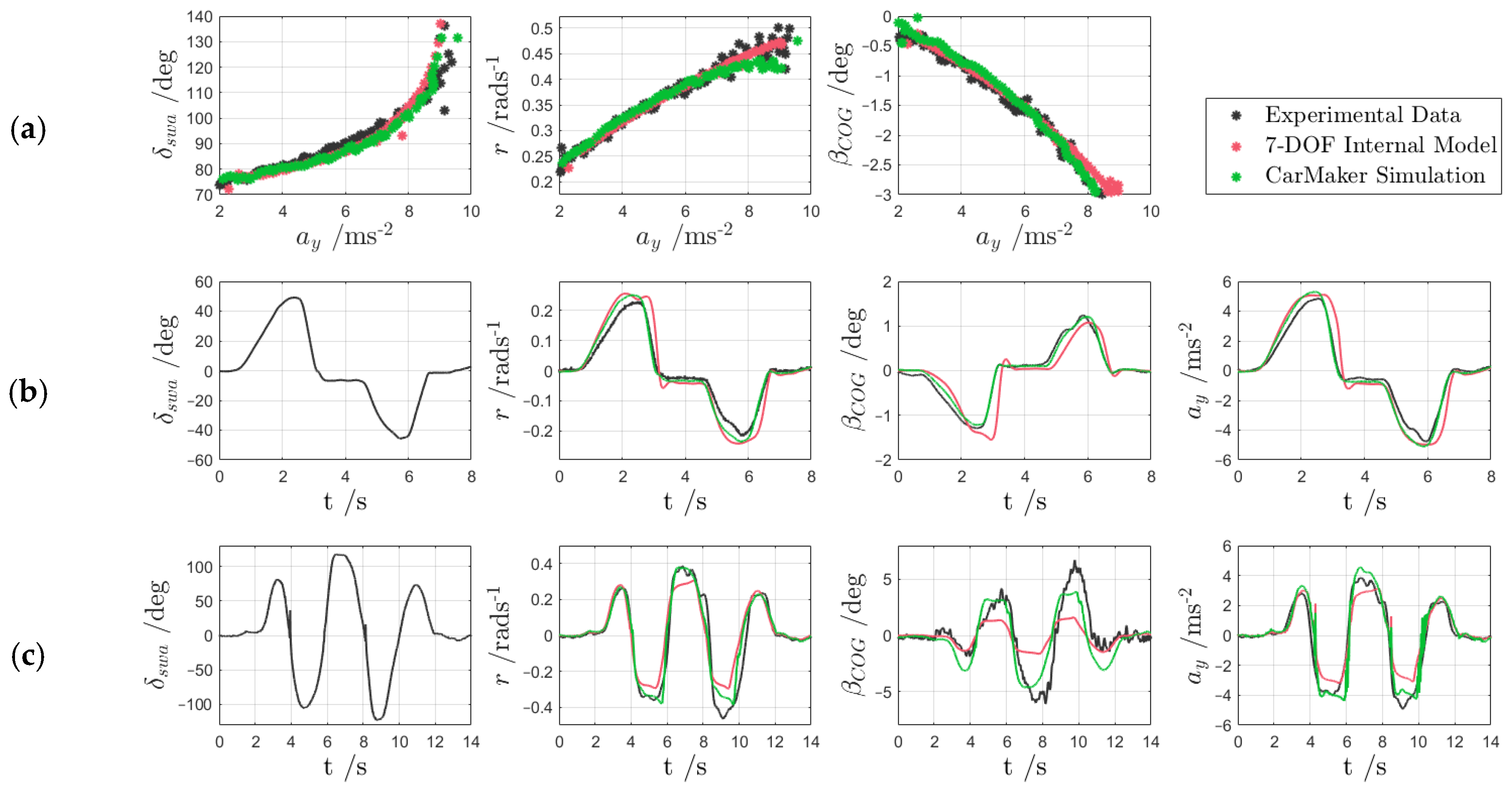
2.4. Experimental Validation of the Models
3. Adaptive Unscented Kalman Filter Architecture
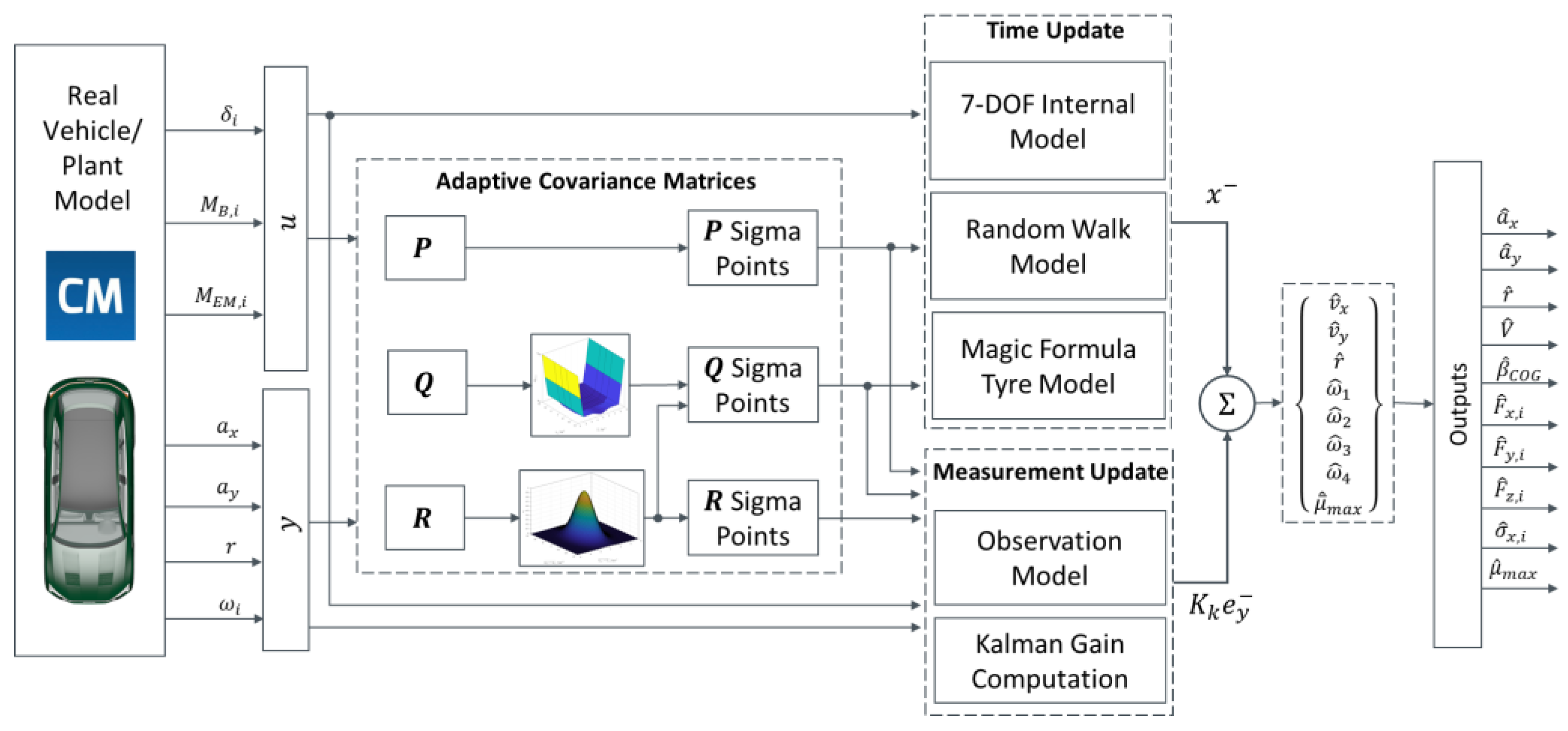
3.1. Filter Architecture and Strategy
- The time update (or prediction) step, in which a predicted state vector , also known as the a priori state vector, where is the time step, is computed by using the previous state estimate and the internal nonlinear vehicle model. is calculated by estimating the mean of so-called sigma points, which approximate the mean and covariance of the system, representing the state estimate and its associated uncertainty. In this step, the process noise covariance matrix, , is used to influence the propagation of the generated sigma points. High values of the elements of indicate significant uncertainty and low confidence in the internal model dynamics, which consequently affects the a priori prediction [52].
- The measurement update (or correction) step, in which is corrected to produce the a posteriori state vector estimate, , by multiplying the error between the predicted measurements and the real measured data, also known as the innovation, , by the Kalman gain, , the calculation of which is beyond the scope of this paper:
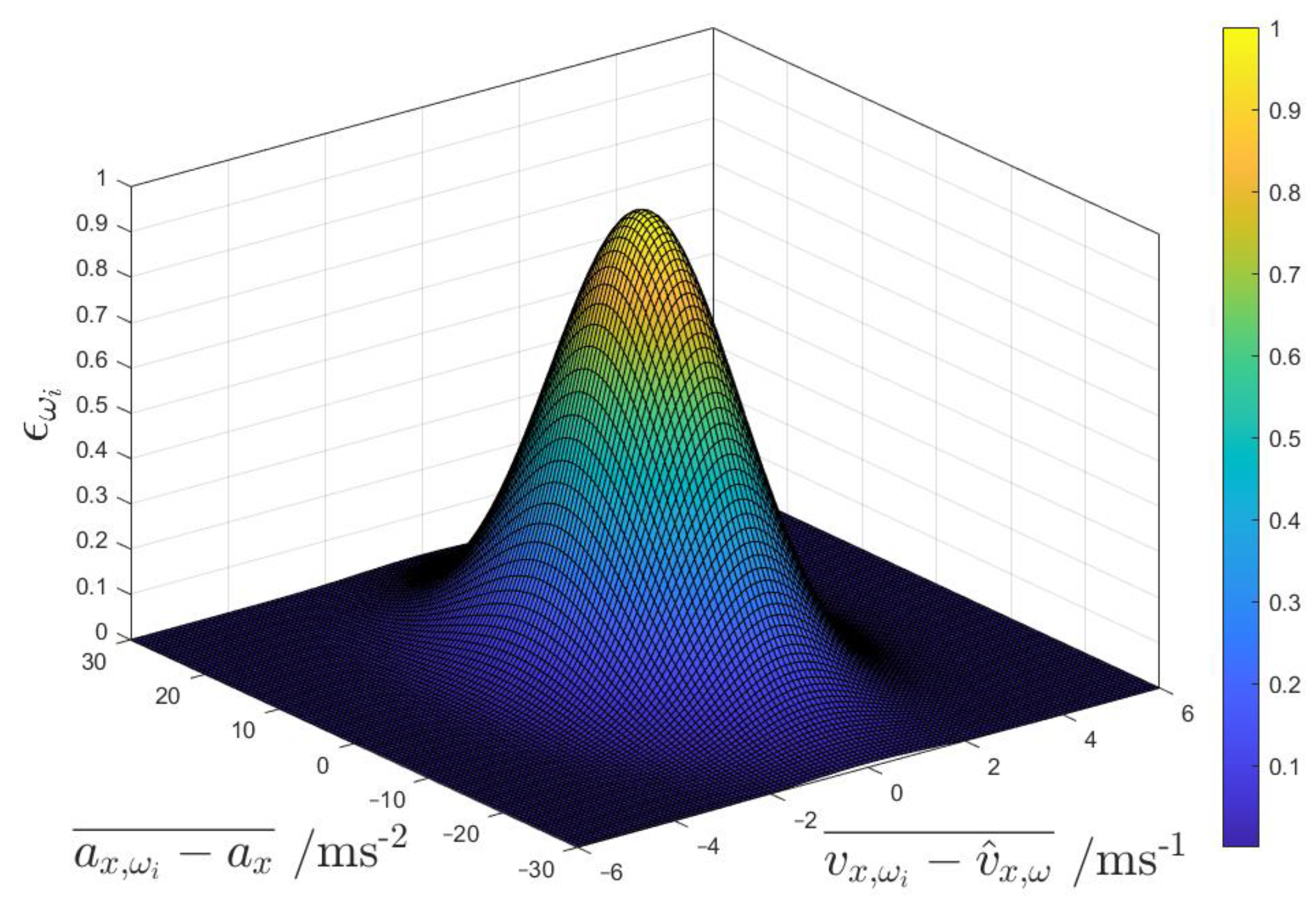
3.2. Wheel Speed Measurement Noise Covariance Adaptation
3.3. Process Noise Covariance Adaptation
4. Test Scenarios and Key Performance Indicators
4.1. Manoeuvres for Performance Assessment
- Test scenario 1: experimental 60 m radius skid pad test, in which the vehicle was slowly accelerated while the driver applied steering angle corrections for tracking the reference trajectory, until the car reached the cornering limit, and could no longer stay within the reference lane.
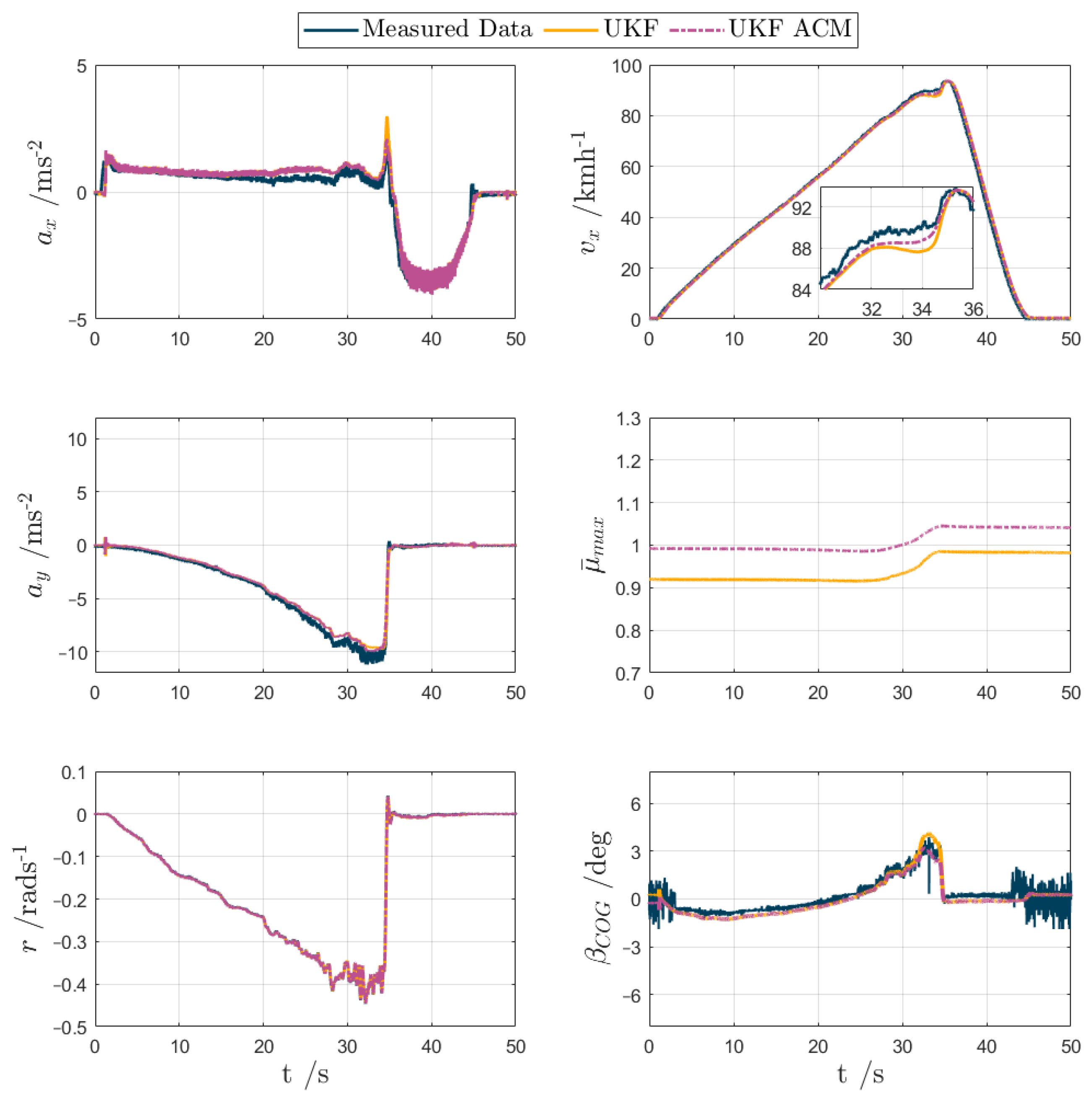
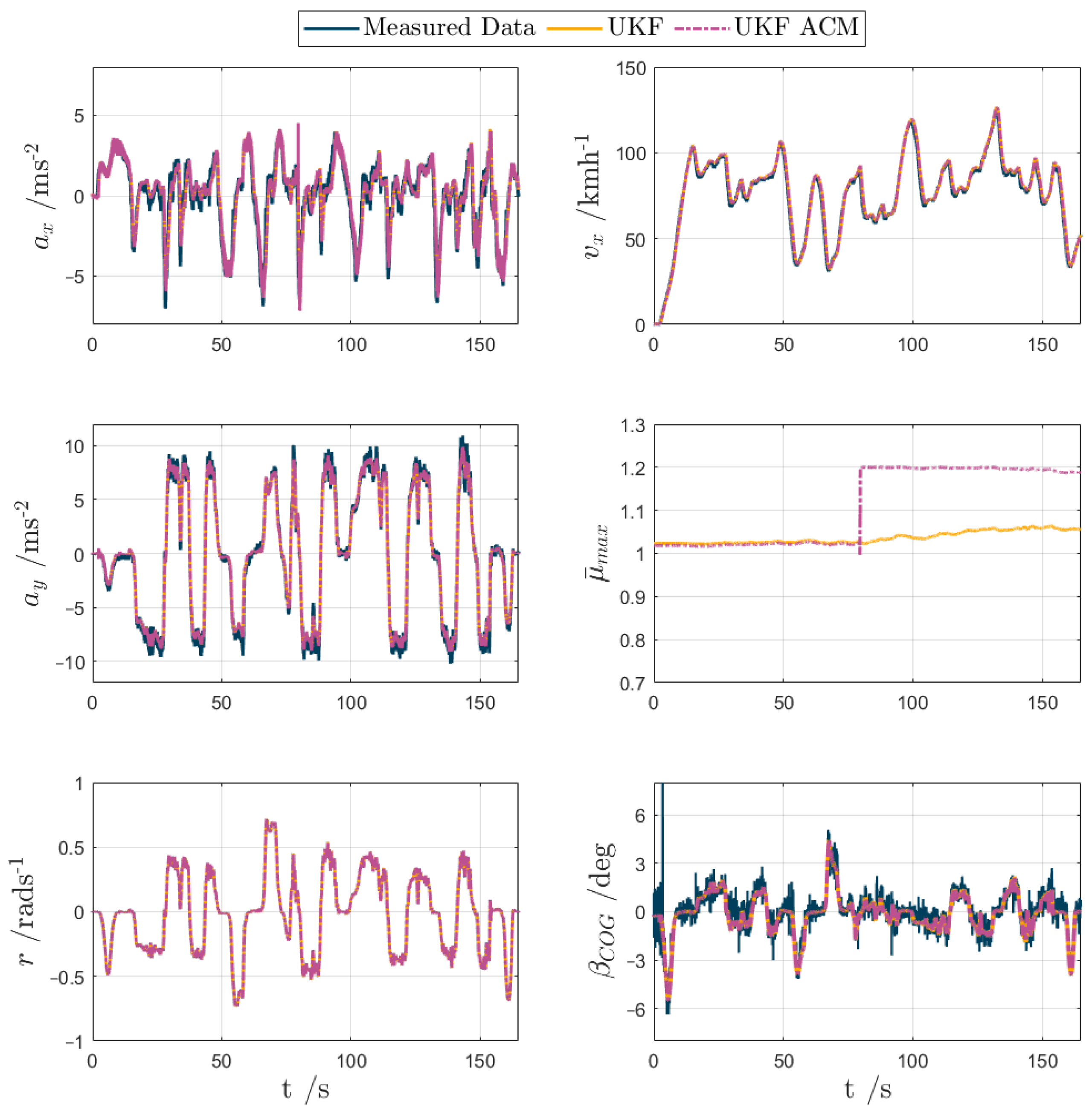
- Test scenario 2: experimental handling circuit lap with the vehicle pushed to its limit by a professional test driver. This test was designed to stress the vehicle at high lateral and longitudinal accelerations, and targeted the UKF performance assessment in peak acceleration conditions.
- Test scenario 3: simulated acceleration and braking test on a very low-friction surface ( 0.3). The manoeuvre involved the vehicle accelerating from a standstill to a speed of ~ 70 kmh−1, followed by heavy braking whereby the anti-lock braking system (ABS) module was activated throughout. A conventional ABS algorithm was chosen, which uses a control law based on the combination of longitudinal tyre slip and wheel deceleration [54]. The ABS was fed with the true values of the relevant variables from the high-fidelity vehicle simulation model, and the two filters received the same inputs from the model, i.e., the simulation results were not affected by the presence of the filters. On the contrary, the traction controller was purposely kept inactive during the acceleration phase, which thus implied significant wheel spinning. The overall test targeted the assessment of the vehicle speed estimation performance in extremely critical conditions.
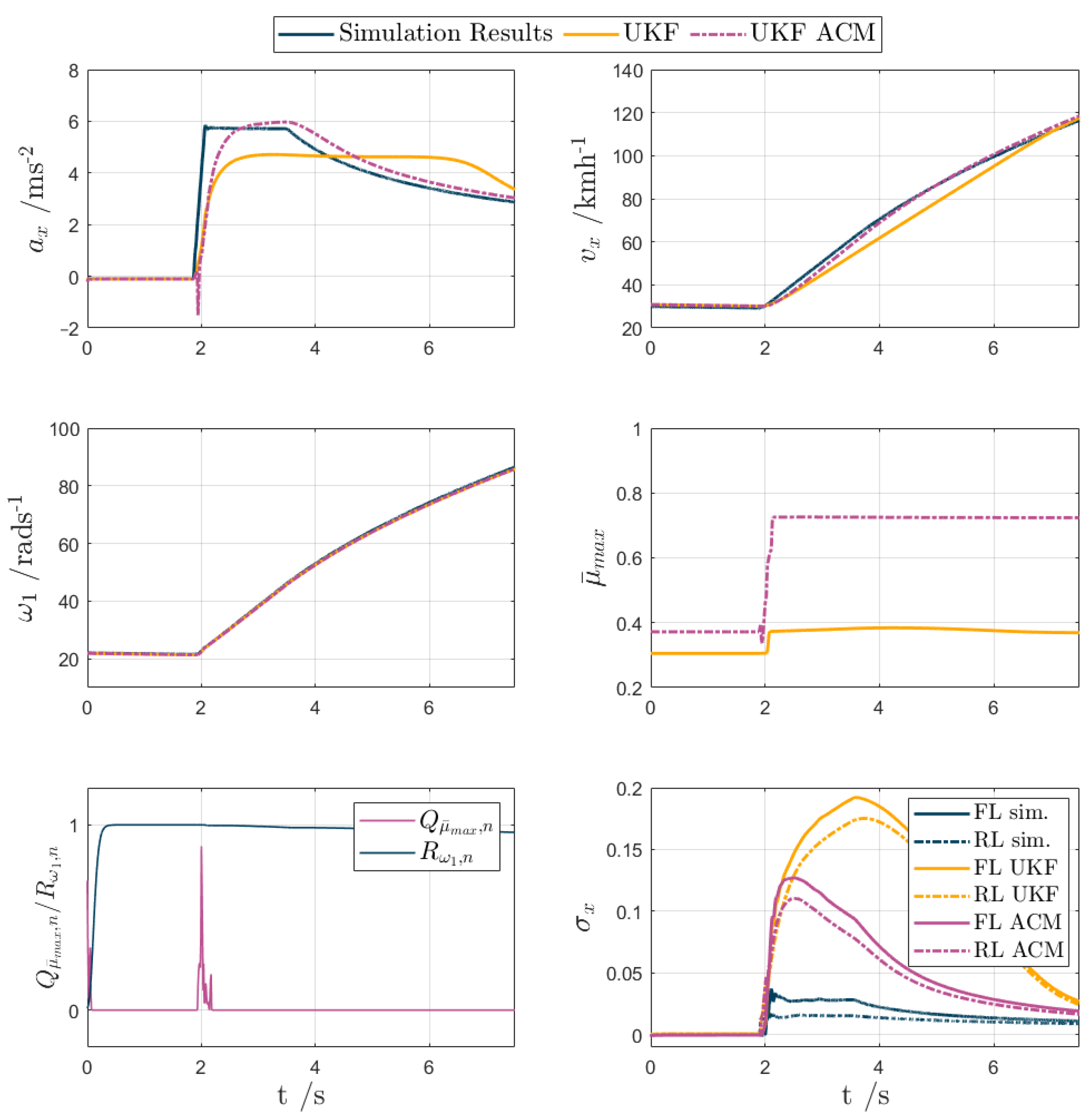
- Test scenario 4: simulated acceleration test with -jump, i.e., with a sudden transition from 0.3 to 1, which was followed by an immediate acceleration at the vehicle’s maximum capability once the rear wheels had crossed over to the higher friction surface. With the electric motors installed on this vehicle, this equated to a rise in from 0 to 6 ms−2 in under 0.3 s.
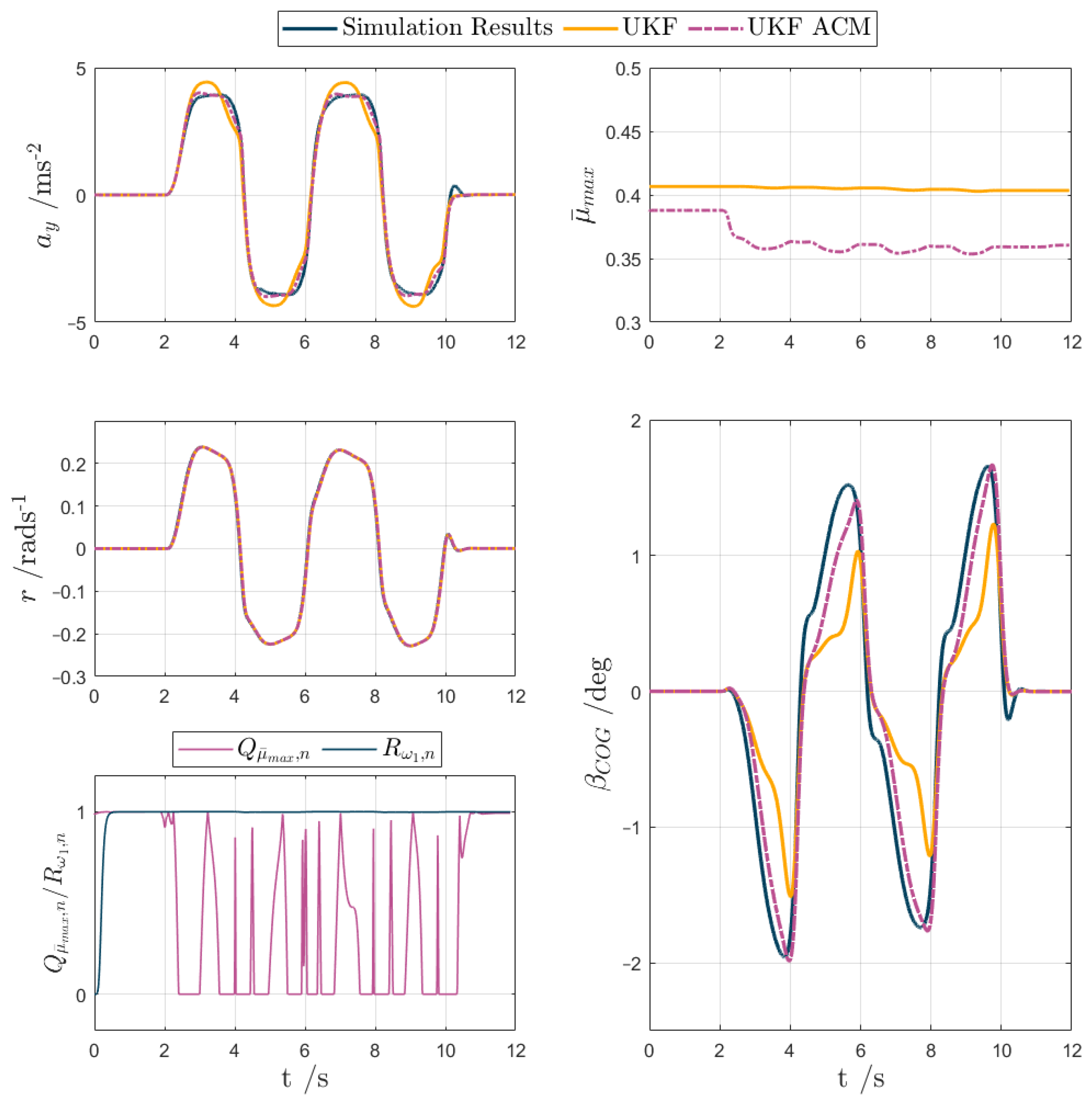
- Test scenario 5: simulated slow sinusoidal steering (with a 0.25 Hz frequency and 45 deg amplitude) manoeuvre at 0.3 from an initial speed of 70 kmh−1, with the torque demand set to the constant value that would maintain the entry speed if the vehicle was operated in straight line. The steering wheel angle amplitude, , was set to 45 deg, corresponding to a steady-state of ~6 ms−2. The test focused on the sideslip angle estimation performance in very low-friction conditions.
4.2. Key Performance Indicators
5. Results
5.1. Assessment for Nominal Vehicle Parameters
5.2. Robustness Analysis
6. Conclusions
- In high-friction conditions near the limit of handling, the performance of the baseline UKF with fixed covariances was very similar to that of UKF ACM, with the latter providing small but still noteworthy benefits.
- In extreme longitudinal slip cases on low with highly incorrect friction level initialisation within the filters, UKF ACM performed significantly better than UKF. In fact, unlike UKF, the variations in the process and measurement noise covariances and , related to the friction random walk model and wheel speed measurements, enabled UKF ACM to promptly detect the actual tyre–road friction level, and achieve highly accurate speed and slip ratio estimation. Similarly, UKF ACM was very effective in identifying instantaneous and extreme changes in , with the related positive impact in terms of the resulting estimation.
- In extreme lateral slip conditions on very low surfaces, the increased sensitivity of of UKF ACM allowed it to outperform the baseline UKF, with improvements of over 50% in . This highlighted a clear safety improvement, as accurate sideslip angle estimation is necessary for typical vehicle chassis controllers.
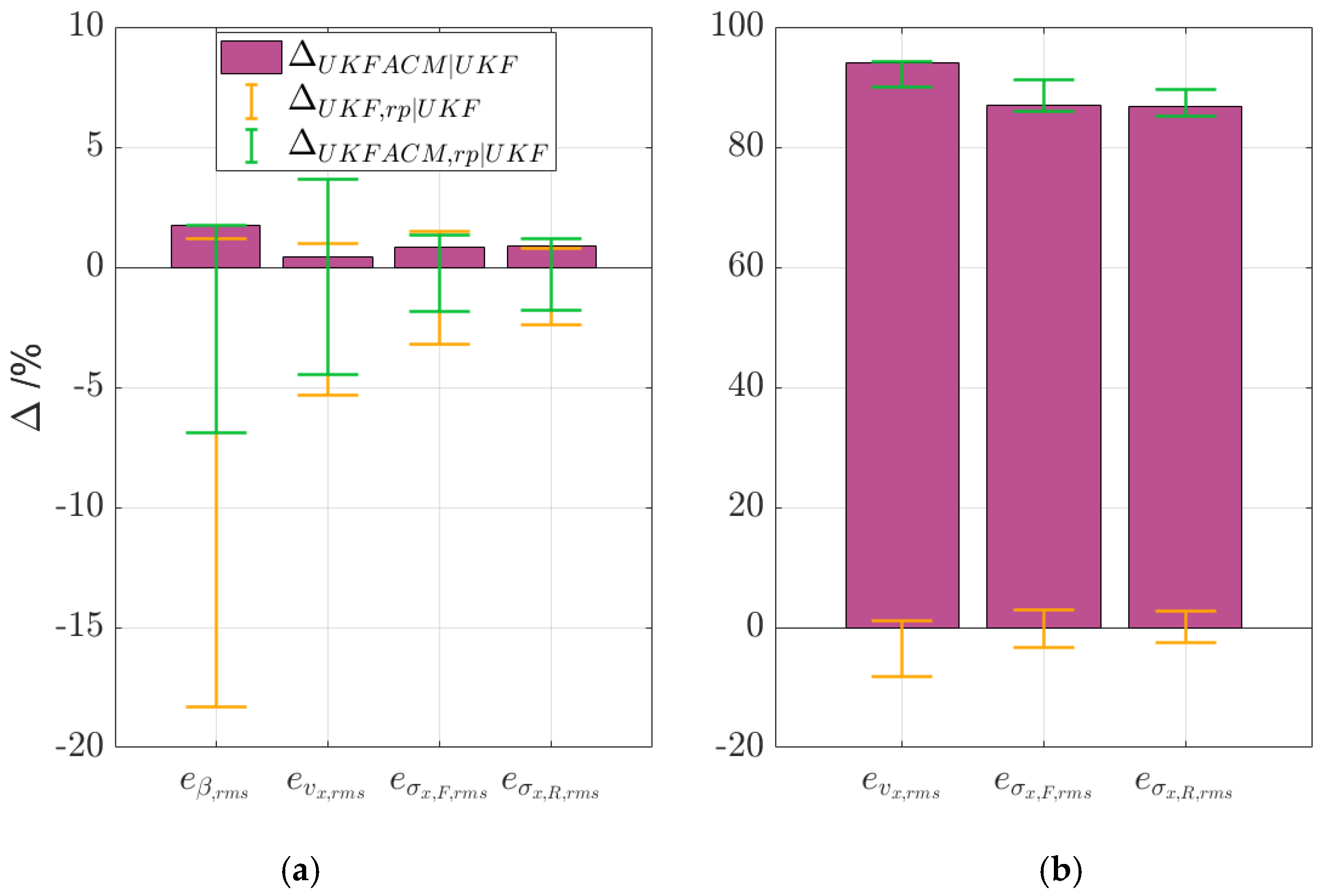
- UKF ACM has shown notable robustness with respect to UKF. In fact, when varying—within the internal models of the filters—parameters that would realistically change during real-world vehicle operation, (i) the UKF ACM KPI decay was maintained within the tolerable range of 10% of the original values for nominal conditions, while UKF experienced a maximum performance reduction that approached 20%; and (ii) the UKF ACM results were the same or better, e.g., by more than 80% in the high longitudinal tyre slip conditions of test scenario 3, than the corresponding UKF ones.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [deg] | [ms−1] | [−] | [−] | |
| Test scenario 2—Experimental handling circuit | ||||
| UKF | 0.510 | 2.515 | 0.0157 | 0.0173 |
| UKF +10% | 0.571 | 2.644 | 0.0157 | 0.0175 |
| UKF –10% | 0.511 | 2.491 | 0.0158 | 0.0171 |
| UKF +10% | 0.521 | 2.515 | 0.0157 | 0.0173 |
| UKF −10% | 0.504 | 2.514 | 0.0157 | 0.0173 |
| UKF +10% | 0.537 | 2.489 | 0.0155 | 0.0171 |
| UKF –10% | 0.604 | 2.535 | 0.0162 | 0.0177 |
| UKF ACM | 0.501 | 2.504 | 0.0156 | 0.0171 |
| UKF ACM +10% | 0.541 | 2.639 | 0.0157 | 0.0174 |
| UKF ACM –10% | 0.525 | 2.421 | 0.0157 | 0.0170 |
| UKF ACM +10% | 0.524 | 2.504 | 0.0157 | 0.0173 |
| UKF ACM −10% | 0.516 | 2.504 | 0.0157 | 0.0173 |
| UKF ACM +10% | 0.525 | 2.503 | 0.0154 | 0.0170 |
| UKF ACM –10% | 0.554 | 2.529 | 0.0162 | 0.0177 |
| Test scenario 3—Simulated acceleration and braking with 0.3 | ||||
| UKF | - | 32.254 | 1.3988 | 1.0325 |
| UKF +10% | - | 31.660 | 1.3575 | 1.0047 |
| UKF –10% | - | 34.876 | 1.4454 | 1.0576 |
| UKF +10% | - | 32.253 | 1.3988 | 1.0325 |
| UKF −10% | - | 32.276 | 1.4006 | 1.0337 |
| UKF +10% | - | 32.211 | 1.4015 | 1.0376 |
| UKF –10% | - | 32.440 | 1.4161 | 1.0441 |
| UKF ACM | - | 1.925 | 0.1828 | 0.1361 |
| UKF ACM +10% | - | 3.153 | 0.1489 | 0.1339 |
| UKF ACM –10% | - | 3.195 | 0.1960 | 0.1527 |
| UKF ACM +10% | - | 2.449 | 0.1357 | 0.1085 |
| UKF ACM −10% | - | 1.895 | 0.1745 | 0.1296 |
| UKF ACM +10% | - | 1.886 | 0.1744 | 0.1305 |
| UKF ACM –10% | - | 1.994 | 0.1874 | 0.1395 |
References
- Mazzilli, V.; De Pinto, S.; Pascali, L.; Contrino, M.; Bottiglione, F.; Mantriota, G.; Gruber, P.; Sorniotti, A. Integrated chassis control: Classification, analysis and future trends. Annu. Rev. Control 2021, 51, 172–205. [Google Scholar] [CrossRef]
- Theunissen, J.; Tota, A.; Gruber, P.; Dhaens, M.; Sorniotti, A. Preview-based techniques for vehicle suspension control: A state-of-the-art review. Annu. Rev. Control 2021, 51, 206–235. [Google Scholar] [CrossRef]
- Ersal, T.; Kolmanovsky, I.; Masoud, N.; Ozay, N.; Scruggs, J.; Vasudevan, R. Connected and automated road vehicles: State of the art and future challenges. Veh. Syst. Dyn. 2020, 58, 672–704. [Google Scholar] [CrossRef]
- Olovsson, T.; Svensson, T.; Wu, J. Future connected vehicles: Communications demands, privacy and cyber-security. Commun. Transp. Res. 2022, 2, 100056. [Google Scholar] [CrossRef]
- Xu, Q.; Li, K.; Wang, J.; Yuan, Q.; Yang, Y.; Chu, W. The status, challenges, and trends: An interpretation of technology roadmap of intelligent and connected vehicles in China. J. Intell. Connect. Veh. 2022, 5, 1–7. [Google Scholar] [CrossRef]
- van Zanten, A.T.; Erhardt, R.; Pfaff, G. VDC, The Vehicle Dynamics Control System of Bosch. SAE J. Passeng. Cars Part 1 1995, 104, 1419–1436. [Google Scholar]
- Singh, K.B.; Arat, M.A.; Taheri, S. Literature review and fundamental approaches for vehicle and tire state estimation. Veh. Syst. Dyn. 2019, 57, 1643–1665. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, N. Advanced Estimation Techniques for Vehicle System Dynamic State: A Survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef]
- Savaresi, S.; Tanelli, M. Active Braking Control Systems Design for Vehicles, 1st ed.; Springer: London, UK, 2010. [Google Scholar]
- Lin, H.; Liu, Y.; Li, S.; Qu, X. How generative adversarial networks promote the development of intelligent transportation systems: A survey. IEEE/CAA J. Autom. Sin. 2023, 10, 1781–1796. [Google Scholar] [CrossRef]
- Wei, W.; Shaoyi, B.; Lanchun, Z.; Kai, Z.; Yongzhi, W.; Weixing, H. Vehicle sideslip angle estimation based on general regression neural network. Math. Probl. Eng. 2016, 2016, 3107910. [Google Scholar] [CrossRef]
- Melzi, S.; Sabbioni, E. On the vehicle sideslip angle estimation through neural networks: Numerical and experimental results. Mech. Syst. Signal Process. 2011, 25, 2005–2019. [Google Scholar] [CrossRef]
- Ghosh, J.; Tonoli, A.; Amati, N. Deep learning based virtual sensor for vehicle sideslip angle estimation: Experimental Results. SAE Tech. Pap. 2018, 1089. [Google Scholar] [CrossRef]
- Bonfitto, A.; Feraco, S.; Tonoli, A.; Amati, N. Combined regression and classification artificial neural networks for sideslip angle estimation and road condition identification. Veh. Syst. Dyn. 2020, 58, 1766–1787. [Google Scholar] [CrossRef]
- González, L.P.; Sánchez, S.S.; Garcia-Guzman, J.; Boada, M.J.L.; Boada, B.L. Simultaneous Estimation of Vehicle Roll and Sideslip Angles through a Deep Learning Approach. Sensors 2020, 20, 3679. [Google Scholar] [CrossRef]
- Bertipaglia, A.; Mol, D.; Alirezaei, M.; Happee, R.; Shyrokau, B. Model-based vs Data-driven Estimation of Vehicle Sideslip Angle and Benefits of Tyre Force Measurements. arXiv 2022, arXiv:2206.15119. [Google Scholar]
- Chindamo, D.; Lenzo, B.; Gadola, M. On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Appl. Sci. 2018, 8, 355. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Zhang, L.; Walker, P. Sideslip Angle Estimation of Ground Vehicles: A Comparative Study. IET Control Theory Appl. 2020, 14, 3490–3505. [Google Scholar] [CrossRef]
- Chen, B.C.; Hsieh, F.C. Sideslip angle estimation using extended Kalman filter. Veh. Syst. Dyn. 2008, 46, 353–364. [Google Scholar] [CrossRef]
- Bersani, M.; Vignati, M.; Mentasti, S.; Arrigoni, S.; Cheli, F. Vehicle state estimation based on Kalman filters. In Proceedings of the AEIT International Conference of Electrical and Electronic Technologies for Automotive, Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Doumiati, M.; Victorino, A.C.; Charara, A.; Lechner, D. Onboard Real-Time Estimation of Vehicle Lateral Tire–Road Forces and Sideslip Angle. IEEE/ASME Trans. Mechatron. 2011, 16, 601–614. [Google Scholar] [CrossRef]
- Wang, P.; Fan, X.; Chen, X.; Yi, J.; He, S. UKF Estimation Method of Centroid Slip Angle for Vehicle Stability Control. Int. J. Control Autom. Syst. 2023, 21, 2259–2266. [Google Scholar] [CrossRef]
- Laenza, A.; Mantriota, G.; Reina, G. On the vehicle dynamics prediction via model-based observation. Veh. Syst. Dyn. 2023, 1–22, in press. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar]
- Xiong, L.; Xia, X.; Lu, Y.; Liu, W.; Gao, L.; Song, S.; Han, Y.; Yu, Z. IMU-Based Automated Vehicle Slip Angle and Attitude Estimation Aided by Vehicle Dynamics. Sensors 2019, 19, 1930. [Google Scholar] [CrossRef] [PubMed]
- Madhusudhanan, A.K.; Corno, M.; Holweg, E. Vehicle sideslip estimator using load sensing bearings. Control Eng. Pract. 2016, 54, 46–57. [Google Scholar] [CrossRef]
- Lenzo, B.; Ottomano, G.; Strano, S.; Terzo, M.; Tordela, C. A Physical-Based Observer for Vehicle State Estimation and Road Condition Monitoring. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Rome, Italy, 22–24 July 2020. [Google Scholar]
- Villano, E.; Lenzo, B.; Sakhnevych, A. Cross-combined UKF for vehicle sideslip angle estimation with a modified Dugoff tire model: Design and experimental results. Meccanica 2021, 56, 2653–2668. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Ran, X.; Song, J.; Wu, K. A variable structure extended Kalman filter for vehicle sideslip angle estimation on a low friction road. Veh. Syst. Dyn. 2014, 52, 280–308. [Google Scholar] [CrossRef]
- Antonov, S.; Fehn, A.; Kugi, A. Unscented Kalman filter for vehicle state estimation. Veh. Syst. Dyn. 2011, 49, 1497–1520. [Google Scholar] [CrossRef]
- Heidfeld, H.; Schünemann, M.; Kasper, R. UKF-based State and tire slip estimation for a 4WD electric vehicle. Veh. Syst. Dyn. 2019, 58, 1479–1496. [Google Scholar] [CrossRef]
- Wielitzka, M.; Busch, A.; Dagen, M.; Ortmaier, T.; Serra, G. Unscented Kalman filter for state and parameter estimation in vehicle dynamics. In Kalman Filters-Theory for Advanced Applications; IntechOpen: Rijeka, Croatia, 2018; pp. 56–75. [Google Scholar]
- Wenzel, T.A.; Burnham, K.J.; Blundell, M.V.; Williams, R.A. Dual extended Kalman filter for vehicle state and parameter estimation. Veh. Syst. Dyn. 2006, 44, 153–171. [Google Scholar] [CrossRef]
- Liao, Y.W.; Borrelli, F. An adaptive approach to real-time estimation of vehicle sideslip, road bank angles, and sensor bias. IEEE Trans Veh Technol. 2019, 68, 7443–7454. [Google Scholar] [CrossRef]
- Bechtoff, J.; Koenig, L.; Isermann, R. Cornering stiffness and sideslip angle estimation for integrated vehicle dynamics control. IFAC-PapersOnLine 2016, 49, 297–304. [Google Scholar] [CrossRef]
- Bertipaglia, A.; Shyrokau, B.; Alirezaei, M.; Happee, R. A two-stage bayesian optimisation for automatic tuning of an unscented kalman filter for vehicle sideslip angle estimation. IEEE Intell. Veh. Symp. 2022, 2022, 670–677. [Google Scholar]
- van Aalst, S. Virtual Sensing for Vehicle Dynamics. Ph.D. Thesis, KU Leuven, Leuven, Belgium, 2020. [Google Scholar]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Jiang, H.; Sun, X. Design of Vehicle Running States-Fused Estimation Strategy Using Kalman Filters and Tire Force Compensation Method. IEEE Access 2019, 7, 87273–87287. [Google Scholar] [CrossRef]
- Zhujie, S.; Fen, L.; Youqun, Z.; Shougang, M. Vehicle state and parameter estimation based on improved adaptive dual extended Kalman filter with variable sliding window. In Proceedings of the 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI), Nanjing, China, 28–30 October 2022; pp. 1–6. [Google Scholar]
- Chen, Y.; Yan, H.; Li, Y. Vehicle State Estimation Based on Sage–Husa Adaptive Unscented Kalman Filtering. World Electr. Veh. J. 2023, 14, 167. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Zhao, Z. State Parameter Estimation of Intelligent Vehicles Based on an Adaptive Unscented Kalman Filter. Electronics 2023, 12, 1500. [Google Scholar] [CrossRef]
- Pang, H.; Wang, P.; Wang, M.; Hu, C. On accurate estimation of vehicle lateral states based on an improved adaptive unscented Kalman filter. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 2022, 09544070221132328. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, M.; Zhang, Y.; Hu, Z.; Sun, Q.; Lu, B. An Enhanced Adaptive Unscented Kalman Filter for Vehicle State Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- van Aalst, S.; Naets, F.; Boulkroune, B.; De Nijs, W.; Desmet, W. An adaptive vehicle sideslip estimator for reliable estimation in low and high excitation driving. IFAC-PapersOnLine 2018, 51, 243–248. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A. Autonomous Vehicle Kinematics and Dynamics Synthesis for Sideslip Angle Estimation Based on Consensus Kalman Filter. IEEE Trans. Control Syst. Technol. 2023, 31, 179–192. [Google Scholar] [CrossRef]
- Li, X.; Xu, N.; Li, Q.; Guo, K.; Zhou, J. A fusion methodology for sideslip angle estimation on the basis of kinematics-based and model-based approaches. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1930–1943. [Google Scholar] [CrossRef]
- Pacejka, H.B. Tire and Vehicle Dynamics, 2nd ed.; SAE International: Warrendale, PA, USA, 2006. [Google Scholar]
- ISO 7401; Road Vehicles—Lateral Transient Response Test Methods—Open-Loop Test Methods. ISO: Geneva, Switzerland, 2011.
- Mazzilli, V.; Ivone, D.; De Pinto, S.; Pascali, L.; Contrino, M.; Tarquinio, G.; Gruber, P.; Sorniotti, A. On the benefit of smart tyre technology on vehicle state estimation. Veh. Syst. Dyn. 2022, 60, 3694–3719. [Google Scholar] [CrossRef]
- Jung, S.; Kim, T.Y.; Yoo, W.S. Advanced slip ratio for ensuring numerical stability of low-speed driving simulation. Part I: Longitudinal slip ratio. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 2000–2006. [Google Scholar] [CrossRef]
- Kim, T.Y.; Jung, S.; Yoo, W.S. Advanced slip ratio for ensuring numerical stability of low-speed driving simulation: Part II—Lateral slip ratio. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 2903–2911. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2006; pp. 2–12. [Google Scholar]
- Lai, C.D.; Balakrishnan, N. Continuous Bivariate Distributions; Springer New York: New York, NY, USA, 2009. [Google Scholar]
- Burckhardt, M.; Reimpell, J. Fahrwerktechnik: Radschlupe-Regelsysteme; Vogel: Würzburg, Germany, 1993. [Google Scholar]












| Description | Symbol | Value | Unit |
|---|---|---|---|
| Vehicle mass in real testing conditions | 2843 | [kg] | |
| Yaw mass moment of inertia | 4124 | [kgm2] | |
| Front semi-wheelbase | 1.47 | [m] | |
| Rear semi-wheelbase | 1.46 | [m] | |
| Front track width | 1.60 | [m] | |
| Rear track width | 1.60 | [m] | |
| Centre of gravity height | 0.63 | [m] | |
| Wheel radius | 0.38 | [m] |
| [deg] | [%] | [ms−1] | [%] | [−] | [%] | [−] | [%] | |
| Test Scenario 1—Experimental skid pad | ||||||||
| UKF | 0.429 | - | 1.531 | - | 0.0264 | - | 0.0287 | - |
| UKF ACM | 0.415 | −3.15% | 1.472 | −3.83% | 0.0257 | −2.54% | 0.0282 | −1.84% |
| Test Scenario 2—Experimental handling circuit | ||||||||
| UKF | 0.510 | - | 2.515 | - | 0.0157 | - | 0.0173 | - |
| UKF ACM | 0.501 | −1.76% | 2.504 | −0.43% | 0.0156 | −0.83% | 0.0171 | −0.87% |
| Test Scenario 3—Simulated acceleration and braking with 0.3 | ||||||||
| UKF | - | - | 32.254 | - | 1.3988 | - | 1.0325 | - |
| UKF ACM | - | - | 1.925 | −94% | 0.1828 | −87% | 0.1361 | −87% |
| Test scenario 4—Simulated acceleration with -jump | ||||||||
| UKF | - | - | 4.993 | - | 0.0956 | - | 0.0928 | - |
| UKF ACM | - | - | 1.373 | −72% | 0.0422 | −56% | 0.0401 | −57% |
| Test scenario 5—Simulated sinusoidal steering test with 0.3 | ||||||||
| UKF | 0.508 | - | 0.985 | - | 0.0327 | - | 0.0328 | - |
| UKF ACM | 0.233 | −54% | 0.948 | −3.71% | 0.0322 | −1.41% | 0.0323 | −1.40% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshawi, A.; De Pinto, S.; Stano, P.; van Aalst, S.; Praet, K.; Boulay, E.; Ivone, D.; Gruber, P.; Sorniotti, A. An Adaptive Unscented Kalman Filter for the Estimation of the Vehicle Velocity Components, Slip Angles, and Slip Ratios in Extreme Driving Manoeuvres. Sensors 2024, 24, 436. https://doi.org/10.3390/s24020436
Alshawi A, De Pinto S, Stano P, van Aalst S, Praet K, Boulay E, Ivone D, Gruber P, Sorniotti A. An Adaptive Unscented Kalman Filter for the Estimation of the Vehicle Velocity Components, Slip Angles, and Slip Ratios in Extreme Driving Manoeuvres. Sensors. 2024; 24(2):436. https://doi.org/10.3390/s24020436
Chicago/Turabian StyleAlshawi, Aymen, Stefano De Pinto, Pietro Stano, Sebastiaan van Aalst, Kylian Praet, Emilie Boulay, Davide Ivone, Patrick Gruber, and Aldo Sorniotti. 2024. "An Adaptive Unscented Kalman Filter for the Estimation of the Vehicle Velocity Components, Slip Angles, and Slip Ratios in Extreme Driving Manoeuvres" Sensors 24, no. 2: 436. https://doi.org/10.3390/s24020436
APA StyleAlshawi, A., De Pinto, S., Stano, P., van Aalst, S., Praet, K., Boulay, E., Ivone, D., Gruber, P., & Sorniotti, A. (2024). An Adaptive Unscented Kalman Filter for the Estimation of the Vehicle Velocity Components, Slip Angles, and Slip Ratios in Extreme Driving Manoeuvres. Sensors, 24(2), 436. https://doi.org/10.3390/s24020436