
A Vibration-Based Methodology to Monitor Road Surface: A Process to Overcome the Speed Effect


Abstract
:1. Introduction
2. State of the Art
3. Methods
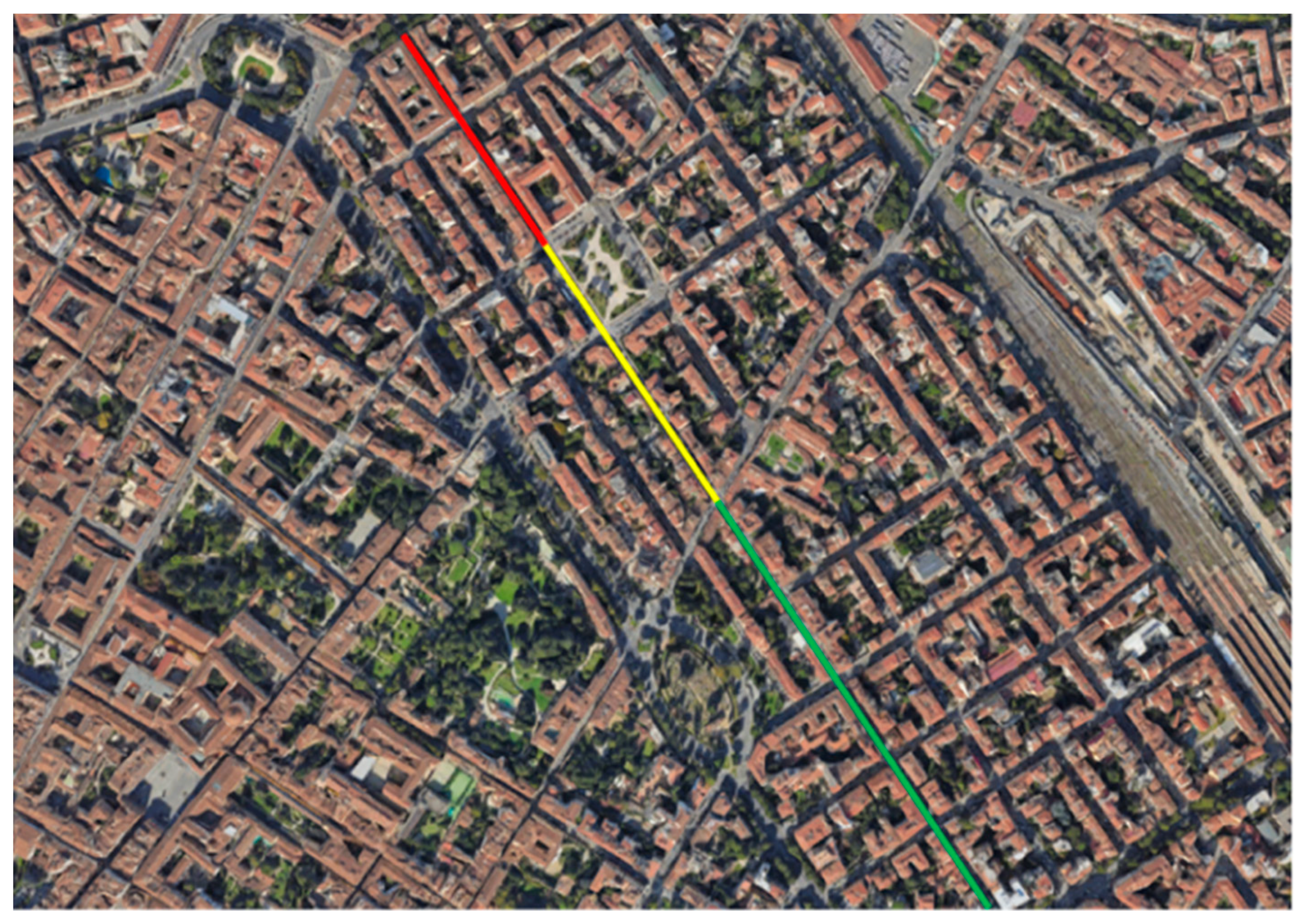
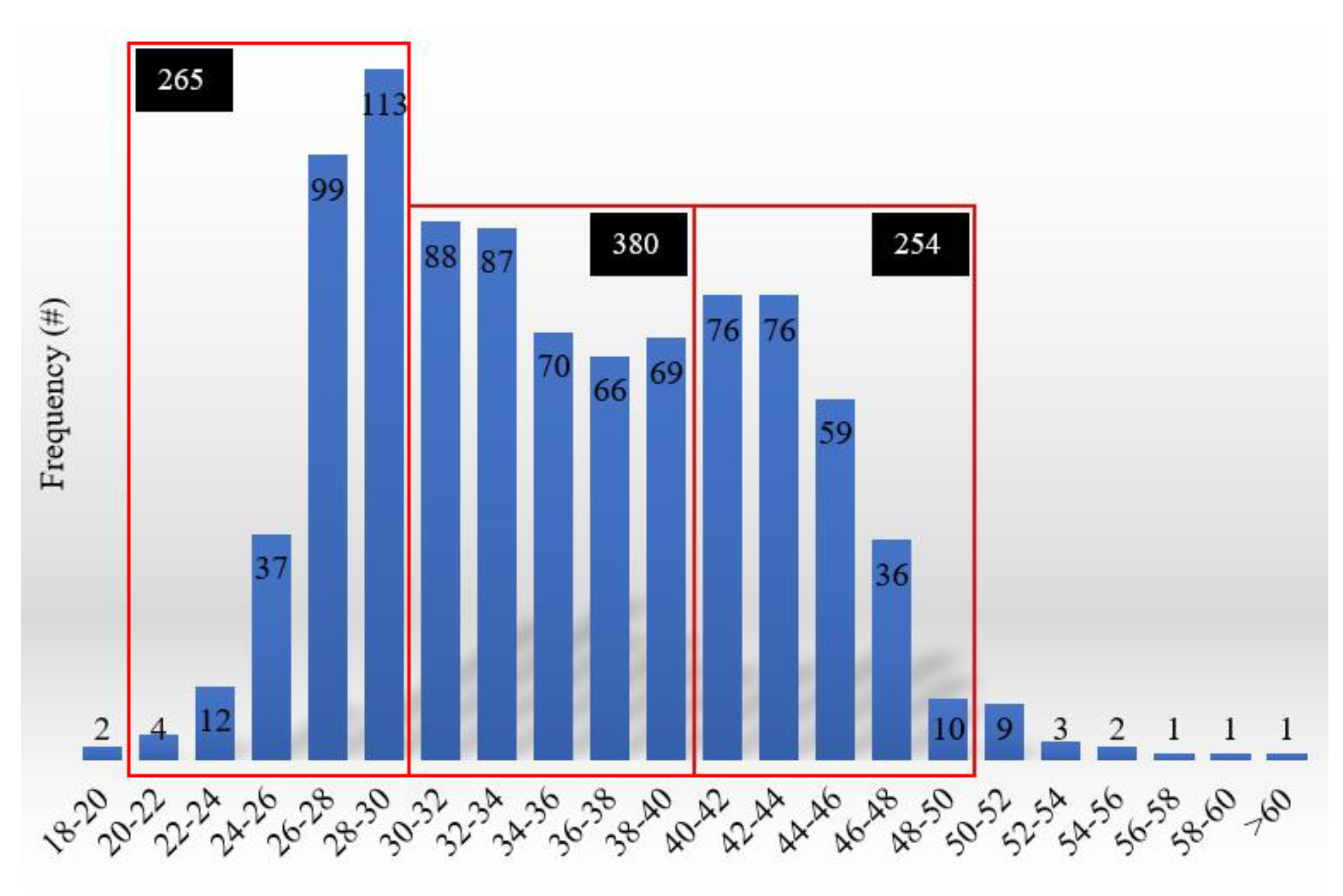
3.1. Experimentation Overview
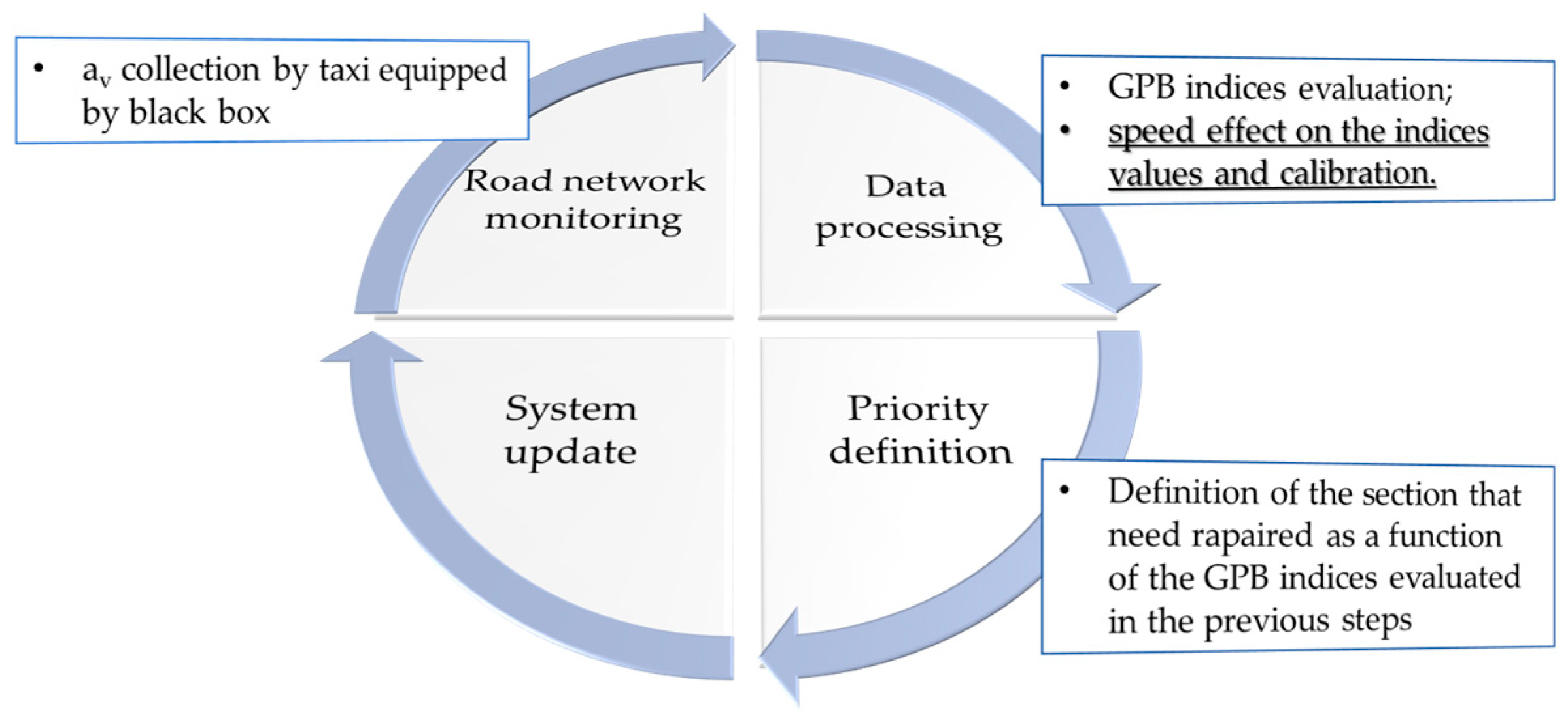
3.2. Monitoring Procedure and Evaluation Index
3.3. Data Processing
- (a)
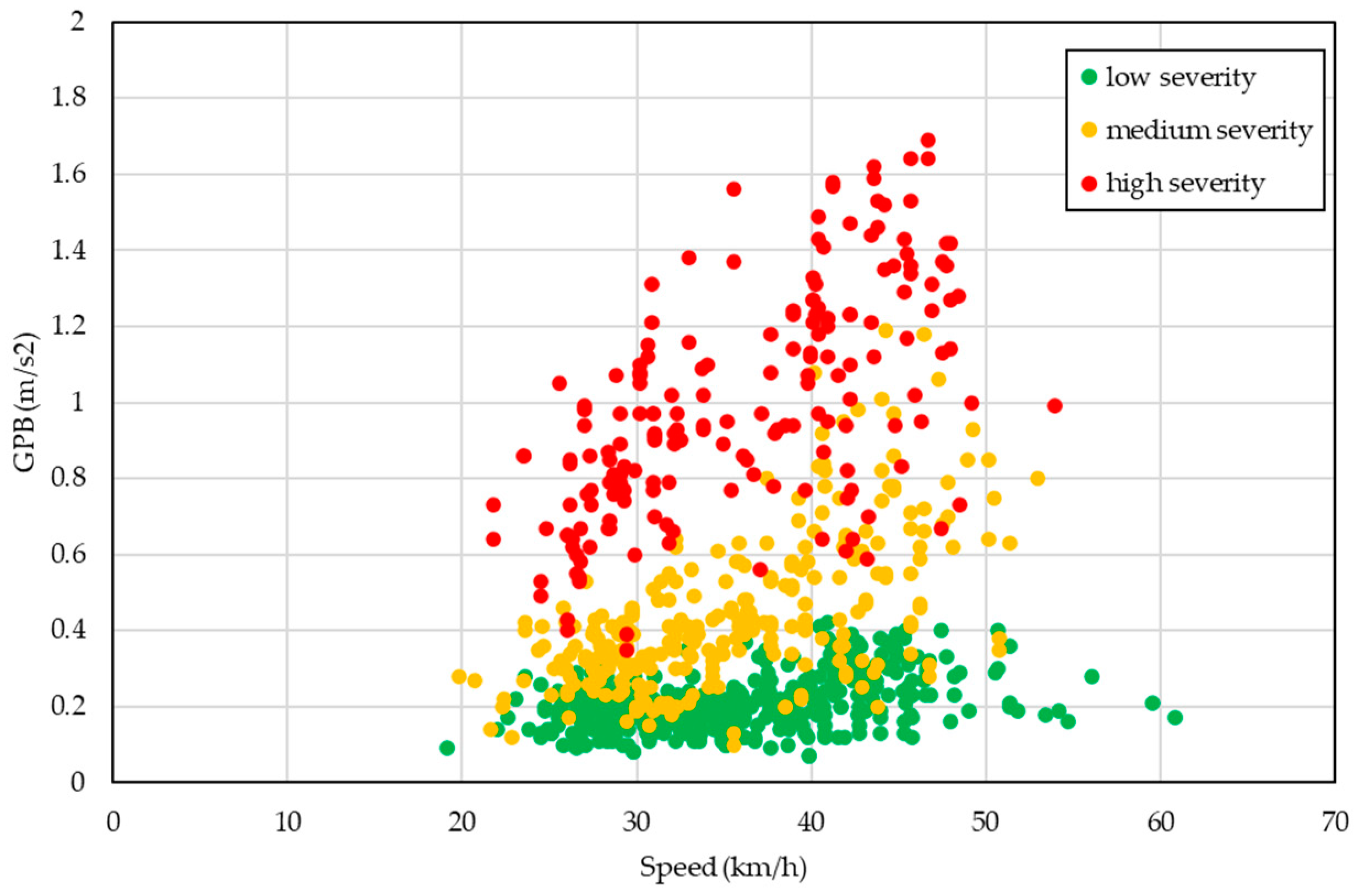
- null hypothesis (H0): GPB values obtained from the three speed ranges can be considered as belonging to the same population, hence speed surveying does not affect the results in terms of severity classification;
- (b)
- alternative hypothesis (H1): the GPB index values do not belong to the same population; therefore, there is a significant difference between the GPB value estimated at different speeds. In this case, the classification of the road pavement condition needs to be made carefully, with reference (only) to a specific range of survey speed.
4. Results and Discussion
- Normally distributed data (Shapiro–Wilk test);
- Homoscedasticity of the data (Levene’s test).
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lekshmipathy, J.; Samuel, N.M.; Velayudhan, S. Vibration vs. vision: Based approach for automated pavement distress detection. Int. J. Pavement Res. Technol. 2020, 13, 402–410. [Google Scholar] [CrossRef]
- Meocci, M.; Branzi, V.; Sangiovanni, A. An innovative approach for high-performance road pavement monitoring using black box. J. Civ. Struct. Health Monit. 2021, 11, 485–506. [Google Scholar] [CrossRef]
- Meocci, M.; Branzi, V. Black Boxes data for Road Pavement Condition monitoring: A case study in Florence. In Proceedings of the Eleventh International Conference on the Bearing Capacity of Roads, Railways and Airfields, Trondheim, Norway, 20–27 June 2022. [Google Scholar] [CrossRef]
- Meocci, M. A road pavement monitoring process for urban road: The case study of via Leonardo Da Vinci in Florence. In Proceedings of the XXVII Word Road Congress, Prague, Czech Republic, 2–6 October 2023. [Google Scholar]
- Sattar, S.; Li, S.; Chapman, M. Road Surface Monitoring Using Smartphone Sensors: A Review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef]
- Ranyal, E.; Sadhu, A.; Jain, K. Road Condition Monitoring Using Smart Sensing and Artificial Intelligence: A Review. Sensors 2022, 22, 3044. [Google Scholar] [CrossRef]
- González, A.; O’brien, E.J.; Li, Y.Y.; Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. Veh. Syst. Dyn. 2008, 46, 483–499. [Google Scholar] [CrossRef]
- Alavi, A.H.; Buttlar, W.G. An overview of smartphone technology for citizen-centered, real-time and scalable civil infrastructure monitoring. Future Gener. Comput. Syst. 2019, 93, 651–672. [Google Scholar] [CrossRef]
- Alatoom, Y.I.; Obaidat, T.I. Measurement of Street Pavement Roughness in Urban Areas Using Smartphone. Int. J. Pavimentazione Res. Technol. 2022, 15, 1003–1020. [Google Scholar] [CrossRef]
- Alqaydi, S.; Zeiada, W.; Llort, D.; Elwakil, A. Using Smart Phones to Assessment Road Roughness in the UAE. In Proceedings of the 11th Annual International Conference on Industrial Engineering and Operations Management, Singapore, 7–11 March 2021. [Google Scholar]
- O’Brien, E.; McGetrick, P.; González, A. Identifcation of Road Irregularities via Vehicle Accelerations. In Proceedings of the Transport Research Arena Europe, Brussels, Belgium, 7–10 June 2010. [Google Scholar]
- Martinelli, A.; Meocci, M.; Dolfi, M.; Branzi, V.; Morosi, S.; Argenti, F.; Berzi, L.; Consumi, T. Road Surface Anomaly Assessment Using Low-Cost Accelerometers: A Machine Learning Approach. Sensors 2022, 22, 3788. [Google Scholar] [CrossRef]
- Loprencipe, G.; Vaz De Almeida Filho, F.G.; Oliveira, R.E.; Bruno, S. Validation of a Low-Cost Pavement Monitoring Inertial-Based System for Urban Road Networks. Sensors 2021, 2, 3127. [Google Scholar] [CrossRef]
- Ye, Z.; Lu, Y.; Wang, L. Investigating the pavement vibration response for roadway service condition evaluation. Adv. Civ. Eng. 2018, 1196, 2714657. [Google Scholar] [CrossRef]
- Yu, B.X.; Yu, X. Vibration-based system for pavement condition evaluation. In Proceedings of the 9th International Conference on Applications of Advanced Technology in Transportation, Chicago, IL, USA, 13–15 August 2006; pp. 183–189. [Google Scholar]
- Carlos, M.R.; Aragón, M.; González, L.C.; Escalante, H.; Martínez, F. Evaluation of detection approaches for road anomalies based on accelerometer readings—Addressing who’s who. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3334–3343. [Google Scholar] [CrossRef]
- Eriksson, J.; Girod, L.; Hull, B.; Newton, R.; Madden, S.; Balakrishnan, H. The pothole patrol: Using a mobile sensor network for road surface monitoring. In Proceedings of the 6th International Conference on Mobile System, Applications and Service, Ser. MobySys’08, New York, NY, USA, 17–20 June 2008; pp. 29–39. [Google Scholar]
- Chen, K.; Lu, M.; Tan, G.; Wu, J. CRSM: Crowdsourcing Based Road Surface Monitoring. In Proceedings of the 10th International Conference on High Performance Computing and Communications & 2013 IEEE International Conference on Embedded and Ubiquitous Computing, Zhangjiajie, China, 13–15 November 2013; pp. 2151–2158. [Google Scholar]
- Mohan, P.; Padmanabhan, V.N.; Ramjee, R. Nericell: Rich monitoring of road and trafc conditions using mobile smartphones. In Proceedings of the 6th ACM Conference on Embedded Networked Sensor Systems (SenSys), Raleigh, NC, USA, 5–7 November 2008; pp. 323–336. [Google Scholar]
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones for road roughness condition estimation. J. East. Asia Soc. Transp. Stud. 2013, 10, 1551–1564. [Google Scholar]
- Menant, F.; Martin, J.M.; Meignen, D. Using probe vehicles for pavement monitoring: Experimental results from tests performed on a road network. Transp. Res. Procedia 2016, 14, 3013–3020. [Google Scholar] [CrossRef]
- Forslöf, L.; Jones, H. Roadroid: Continuous Road Condition Monitoring with Smart Phones. J. Civ. Eng. Archit. 2005, 9, 485–496. [Google Scholar] [CrossRef]
- Perttunen, M.; Mazhelis, O.; Cong, F. Distributed road surface condition monitoring using mobile phones. In Proceedings of the 8th International Conference on Ubiquitous Intelligence and Computing, Banff, AB, Canada, 2–4 September 2011. [Google Scholar]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle Vibration Signal Processing for Road Surface Monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Zoysa, K.D.; Keppitiyagama, C.; Seneviratne, G.P.; Shihan, W.W.A.T. A public transport system based sensor network for road surface condition monitoring. In Proceedings of the Workshop on Networked Systems for Developing Regions, Kyoto, Japan, 27 August 2007; pp. 1–6. [Google Scholar]
- Shtayat, A.; Moridpour, S.; Best, B.; Abuhassan, M. Using supervised machine learning algorithms in pavement degradation monitoring. Int. J. Transp. Sci. Technol. 2023, 12, 628–639. [Google Scholar] [CrossRef]
- Ferjani, I.; Alsaif, S.A. How to get best predictions for road monitoring using machine learning techniques. PeerJ Comput. Sci. 2022, 8, e941. [Google Scholar] [CrossRef]
- Martinez-Ríos, E.A.; Bustamante-Bello, M.R.; Arce-Sáenz, L.A. A Review of Road Surface Anomaly Detection and Classification Systems Based on Vibration-Based Techniques. Appl. Sci. 2022, 12, 9413. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhou, M.; Chen, Y.; Huo, M.; Sun, L.; Zhao, S.; Chen, D. A fused method of machine learning and dynamic time warping for road anomalies detection. IEEE Trans. Intell. Transp. Syst. 2020, 23, 827–839. [Google Scholar] [CrossRef]
- Kim, Y.M.; Kim, Y.G.; Son, S.Y.; Lim, S.Y.; Choi, B.Y.; Choi, D.H. Review of Recent Automated Pothole-Detection Methods. Appl. Sci. 2022, 12, 5320. [Google Scholar] [CrossRef]
- Dib, J.; Sirlantzis, K.; Howells, G. A Review on Negative Road Anomaly Detection Methods. IEEE Access 2020, 8, 57298–57316. [Google Scholar] [CrossRef]
- Coenen, T.B.J.; Golroo, A. A review on automated pavement distress detection methods. Cogent Eng. 2017, 4, 1374822. [Google Scholar] [CrossRef]
- Alessandroni, G.; Carini, A.; Lattanzi, E.; Freschi, V.; Bogliolo, A. A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case. Sensors 2017, 17, 305. [Google Scholar] [CrossRef] [PubMed]
- Fox, A.; Kumar, B.V.; Chen, J.; Bai, F. Crowdsourcing undersampled vehicular sensor data for pothole detection. In Proceedings of the 2015 12th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Seattle, WA, USA, 22–25 June 2015; pp. 515–523. [Google Scholar]
- Sebestyen, G.; Muresan, D.; Hangan, A. Road quality evaluation with mobile devices. In Proceedings of the 2015 16th International Carpathian Control Conference (ICCC), Szilvasvarad, Hungary, 27–30 May 2015; pp. 458–464. [Google Scholar]
- Sinharay, A.; Bilal, S.; Pal, A.; Sinha, A. Low computational approach for road condition monitoring using smartphones. In Proceedings of the Computer Society of India (CSI) Annual Convention, Theme: Intelligent Infrastructure, Visakhapatnam, India, 13–15 December 2013; Volume 1. [Google Scholar]
- Zeng, H.; Park, H.; Fontaine, M.; Smith, B.; McGhee, K. Identifying deficient pavement sections by means of an improved acceleration-based metric. Transp. Res. Rec. J. Transp. Res. Board 2015, 2523, 133–142. [Google Scholar] [CrossRef]
- Chou, C.; Siao, G.; Chen, A.; Lee, C. Algorithm for estimating international roughness index by response-based measuring device. J. Transp. Eng. Part B Pavements 2020, 146, 04020031. [Google Scholar] [CrossRef]
- Seraj, F.; van der Zwaag, B.J.; Dilo, A.; Luarasi, T.; Havinga, P. RoADS: A road pavement monitoring system for anomaly detection using smart phones. In Big Data Analytics in the Social and Ubiquitous Context; Springer: Berlin, Germany, 2014; pp. 128–146. [Google Scholar]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6. [Google Scholar]
- Best, B.; Shtayat, A.; Moridpour, S.; Shroff, A.; Raol, D. Optimising road pavement maintenance using vibration monitoring. In Proceedings of the 7th E&E Congress Eurasphalt & Eurobitume, Virtual, 15–17 June 2021. [Google Scholar]
- Loprencipe, G.; Zoccali, P.; Cantisani, G. Effects of Vehicular Speed on the Assessment of Pavement Road Roughness. Appl. Sci. 2019, 9, 1783. [Google Scholar] [CrossRef]
- Padilla, J.A.; Victoria, A.N., Jr.; Dela Cruz, O.G.; Despabeladera, C.T.; Creencia, C.J.N. Evaluation of International Roughness Index by Speed-Related Quality Criteria in the Philippines. In Proceedings of the 7th Annual International Conference on Architecture and Civil Engineering (ACE 2019), Singapore, 27–28 May 2019. [Google Scholar] [CrossRef]
- Cantisani, G.; Loprencipe, G. Road Roughness and Whole Body Vibration: Evaluation Tools and Comfort Limits. J. Transp. Eng. 2010, 136, 818–826. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GPB Value | Severity Level | |
|---|---|---|
| <0.40 | low | |
| 0.40–0.65 | medium | |
| 0.65–1.45 | high | |
| Section ID | Sample Size | Average Speed (km/h) | Speed S.D. | Average GPB Index (m/s2) | GPB Standard Deviation |
|---|---|---|---|---|---|
| 1 | 184 | 36 | 7.45 | 1.00 | 0.30 |
| 2 | 276 | 35 | 7.15 | 0.44 | 0.20 |
| 3 | 231 | 35 | 7.05 | 0.19 | 0.07 |
| 4 | 235 | 35 | 7.07 | 0.22 | 0.06 |
| Speed Class | F | p-Value |
|---|---|---|
| Between groups | 14.762 | <0.001 |
| Speed Class | p-Value | |
|---|---|---|
| 1 | 2 | 0.995 |
| 3 | <0.001 | |
| 2 | 1 | 0.995 |
| 3 | <0.001 | |
| 3 | 1 | <0.001 |
| 2 | <0.001 | |
| Speed Class | Statistica | p-Value |
|---|---|---|
| 1–2 | 0.793 | 0.428 |
| 1–3 | −5.541 | <0.001 |
| 2–3 | −4.437 | <0.001 |
| Level of Severity | Speed Class | p-Value ANOVA | p-Value Kruskal–Wallis | |
|---|---|---|---|---|
| High | 1 | 2 | <0.001 | <0.001 |
| 3 | <0.001 | <0.001 | ||
| 2 | 1 | <0.001 | - | |
| 3 | <0.001 | <0.001 | ||
| 3 | 1 | <0.001 | - | |
| 2 | <0.001 | - | ||
| Medium | 1 | 2 | 0.007 | <0.001 |
| 3 | <0.001 | <0.001 | ||
| 2 | 1 | 0.007 | - | |
| 3 | <0.001 | <0.001 | ||
| 3 | 1 | <0.001 | - | |
| 2 | <0.001 | - | ||
| Low | 1 | 2 | 0.722 | 0.452 |
| 3 | <0.001 | <0.001 | ||
| 2 | 1 | 0.722 | - | |
| 3 | <0.001 | <0.001 | ||
| 3 | 1 | <0.001 | - | |
| 2 | <0.001 | - | ||
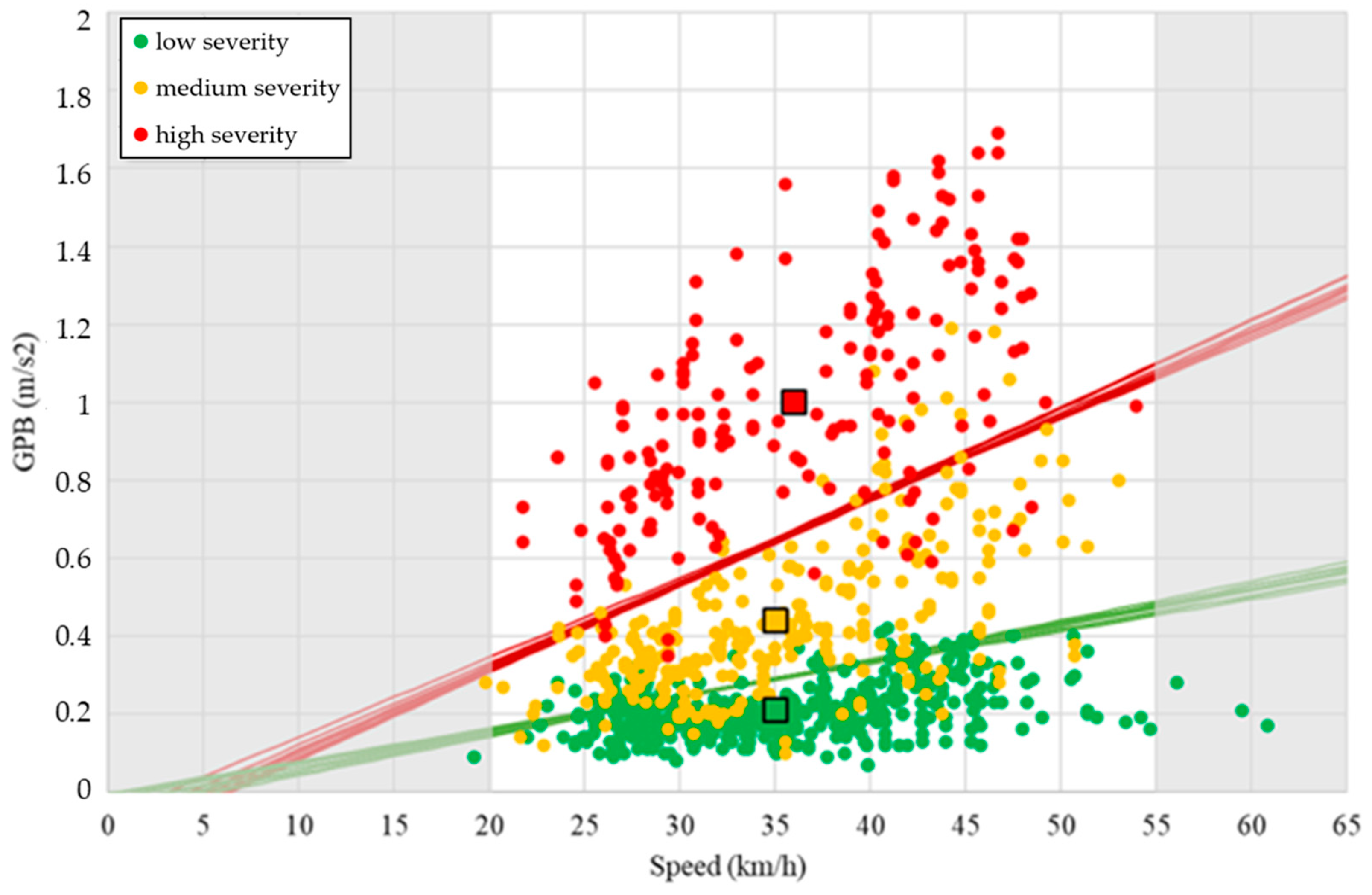
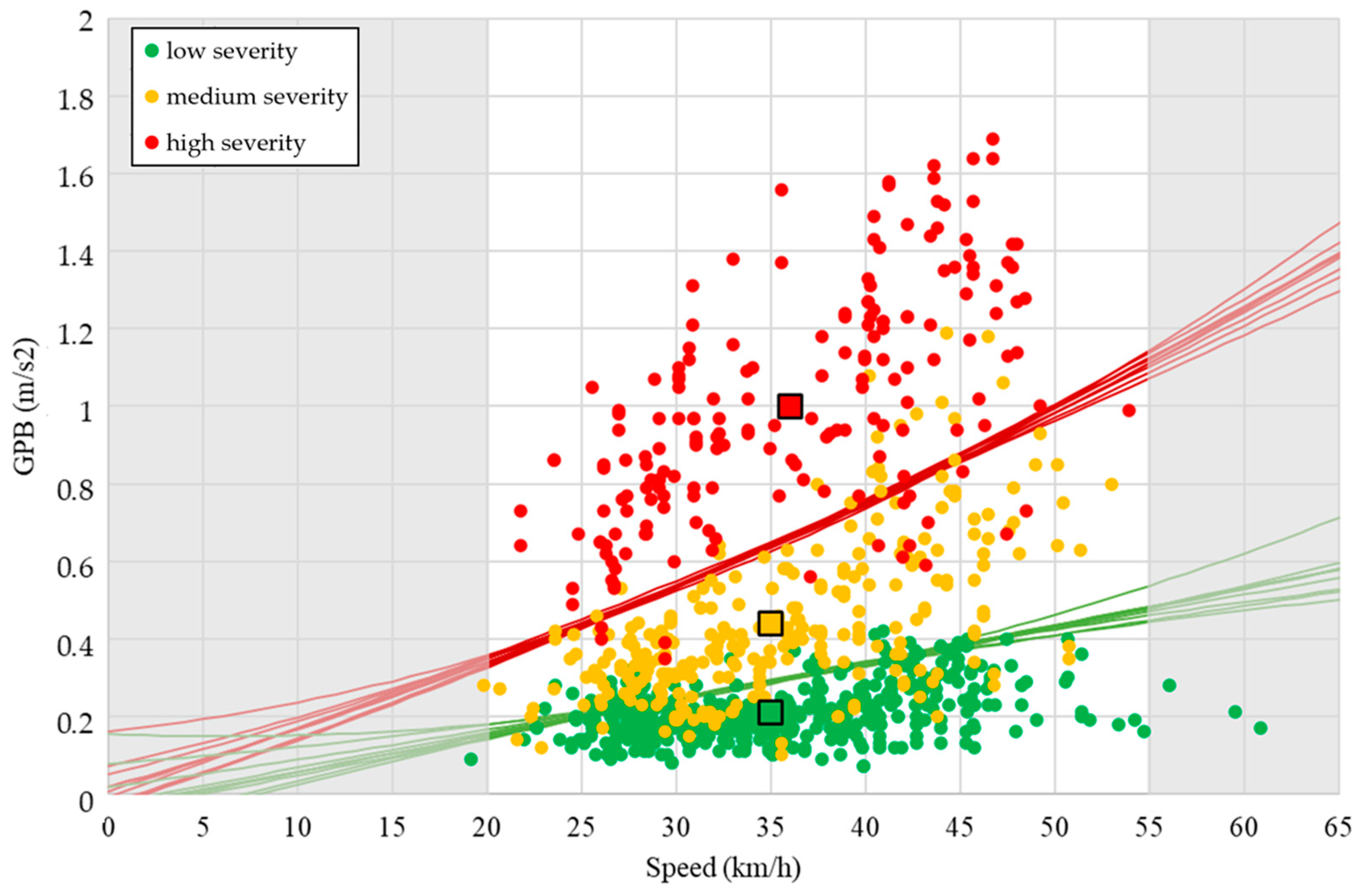
| Boundary | Linear Function | Power Function | |||
|---|---|---|---|---|---|
| a | b | a | b | c | |
| L-M | 0.0086 | −0.0126 | −0.0001 | 0.0130 | −0.0902 |
| M-H | 0.0219 | −0.1298 | 0.0002 | 0.0051 | 0.1615 |
| L-M | 0.0100 | −0.0574 | 0.0002 | −0.0020 | 0.1549 |
| M-H | 0.0226 | −0.1446 | 0.0001 | 0.0162 | −0.0323 |
| L-M | 0.0092 | −0.0294 | −0.0001 | 0.0135 | −0.0080 |
| M-H | 0.0204 | −0.0624 | 0.00004 | 0.0173 | −0.1058 |
| L-M | 0.0083 | −0.0036 | 0.0001 | 0.0096 | −0.0273 |
| M-H | 0.0214 | −0.1083 | 0.00002 | 0.0110 | 0.0726 |
| L-M | 0.0096 | −0.0477 | 0.000002 | 0.0098 | −0.0503 |
| M-H | 0.0210 | −0.0884 | 0.0001 | 0.0155 | 0.0071 |
| L-M | 0.0085 | −0.0064 | 0.0001 | 0.0038 | 0.0770 |
| M-H | 0.0232 | −0.1674 | 0.0003 | −0.0012 | 0.2543 |
| L-M | 0.0089 | −0.0182 | 0.00003 | 0.0069 | 0.0165 |
| M-H | 0.0225 | −0.1343 | 0.0001 | 0.0137 | 0.0178 |
| L-M | 0.0086 | −0.0109 | 0.00004 | 0.0117 | −0.0667 |
| M-H | 0.0225 | −0.1184 | 0.0001 | 0.0169 | −0.0330 |
| L-M | 0.0095 | −0.0397 | 0.000003 | 0.0092 | −0.0354 |
| M-H | 0.0225 | −0.1410 | 0.0001 | 0.0160 | −0.0263 |
| L-M | 0.0091 | −0.0273 | 0.00001 | 0.0101 | −0.0445 |
| M-H | 0.0214 | −0.1045 | 0.0001 | 0.0126 | 0.0490 |
| Iteration | Class | Linear | Power | ||
|---|---|---|---|---|---|
| Right | Non-Right | Right | Non-Right | ||
| 1 | L | 85 (91%) | 8 (9%) | 85 (91%) | 8 (9%) |
| M | 40 (82%) | 9 (18%) | 40 (82%) | 9 (18%) | |
| H | 37 (84%) | 7 (16%) | 37 (84%) | 7 (16%) | |
| 2 | L | 79 (88%) | 11 (12%) | 80 (88%) | 11 (12%) |
| M | 40 (70%) | 17 (30%) | 40 (71%) | 16 (29%) | |
| H | 35 (90%) | 4 (10%) | 35 (90%) | 4 (10%) | |
| 3 | L | 80 (85%) | 14 (15%) | 80 (85%) | 14 (15%) |
| M | 38 (69%) | 17 (31%) | 39 (70%) | 17 (30%) | |
| H | 34 (92%) | 3 (8%) | 34 (94%) | 2 (6%) | |
| 4 | L | 83 (93%) | 6 7%) | 83 (93%) | 6 (7%) |
| M | 42 (75%) | 14 (25%) | 43 (75%) | 14 (25%) | |
| H | 34 (83%) | 7 (17%) | 34 (85%) | 6 (15%) | |
| 5 | L | 83 (90%) | 9 (10%) | 83 (90%) | 9 (10%) |
| M | 40 (71%) | 16 (29%) | 40 (71%) | 16 (29%) | |
| H | 32 (84%) | 6 (16%) | 32 (84%) | 6 (16%) | |
| 6 | L | 85 (89%) | 10 (11%) | 85 (89%) | 10 (11%) |
| M | 39 (78%) | 11 (22%) | 40 (78%) | 11 (22%) | |
| H | 35 (85%) | 6 (15%) | 35 (88%) | 5 (13%) | |
| 7 | L | 89 (90%) | 10 (10%) | 89 (90%) | 10 (10%) |
| M | 41 (82%) | 9 (18%) | 41 (82%) | 9 (18%) | |
| H | 33 (89%) | 4 (11%) | 33 (89%) | 4 (11%) | |
| 8 | L | 87 (91%) | 9 (9%) | 87 (91%) | 9 (9%) |
| M | 39 (80%) | 10 (20%) | 39 (80%) | 10 (20%) | |
| H | 34 (83%) | 7 (17%) | 34 (83%) | 7 (17%) | |
| 9 | L | 88 (94%) | 6 (6%) | 88 (94%) | 6 (6%) |
| M | 46 (84%) | 9 (16%) | 47 (84%) | 9 (16%) | |
| H | 34 (92%) | 3 (8%) | 34 (94%) | 2 (6%) | |
| 10 | L | 83 (88%) | 11 (12%) | 83 (88%) | 11 (12%) |
| M | 41 (77%) | 12 (23%) | 41 (77%) | 12 (23%) | |
| H | 36 (92%) | 3 (8%) | 36 (92%) | 3 (8%) | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meocci, M. A Vibration-Based Methodology to Monitor Road Surface: A Process to Overcome the Speed Effect. Sensors 2024, 24, 925. https://doi.org/10.3390/s24030925
Meocci M. A Vibration-Based Methodology to Monitor Road Surface: A Process to Overcome the Speed Effect. Sensors. 2024; 24(3):925. https://doi.org/10.3390/s24030925
Chicago/Turabian StyleMeocci, Monica. 2024. "A Vibration-Based Methodology to Monitor Road Surface: A Process to Overcome the Speed Effect" Sensors 24, no. 3: 925. https://doi.org/10.3390/s24030925
APA StyleMeocci, M. (2024). A Vibration-Based Methodology to Monitor Road Surface: A Process to Overcome the Speed Effect. Sensors, 24(3), 925. https://doi.org/10.3390/s24030925