1. Introduction
Long-distance curved pipe-jacking has significant engineering and economic benefits in tunneling projects crossing densely built-up urban areas, heavily trafficked road sections, and oversized cross-sections [
1,
2]. However, the traditional pipe-jacking guidance method relies on the visibility conditions of the environment and does not apply to long-distance curved pipe-jacking. The fiber optic gyroscope (FOG) is an all-solid-state angular velocity-sensitive device, and it can be sensitive to the angular velocity of the Earth’s rotation, which has the advantage of autonomous navigation [
3]. Therefore, the pipe-jacking inertial guidance system uses FOG as a primary sensor to provide real-time attitude measurements for long-distance curved pipe-jacking [
4]. But in practical applications, large motor and transformer operations will produce vibrations, electromagnetic disturbances, and other environmental interference due to the rotation of the pipe-jacking cutter. The environment will affect components such as the fiber optic ring in the FOG, and the FOG signal will contain a large amount of random noise, resulting in insufficient long-term accuracy [
5]. Therefore, it is necessary to reduce noise to obtain more accurate FOG signals and improve the accuracy of the pipe-jacking attitude [
6].
Commonly used FOG random noise filtering methods include digital low-pass filters and time series forecasting methods [
7,
8]. The time series forecasting method is based on Kalman filtering by establishing an autoregressive (AR) or autoregressive moving average (ARMA) model for the FOG drifting signal, and optimal estimation is performed by a strong tracking Kalman filtering method [
9,
10]. The Kalman filter cannot strictly distinguish between the useful signal and interference noise in the high frequency part. Therefore, if the low-pass filter is too narrow, it will cause a loss of useful signal, and if the low-pass filter is too wide, it will lead to a poor filtering effect. However, the Kalman filtering method based on AR and ARMA models is proposed for smooth signals. Non-smooth FOG signals need to be smoothed before using these filtering methods.
The empirical mode decomposition (EMD) proposed by Huang E. et al. has achieved effective results in non-smooth and non-linear signal processing [
11]. The EMD can adaptively decompose a signal into a series of intrinsic mode functions (IMFs) according to its own characteristics. The IMF is a description of the signal in different scales. Compared with wavelet transform, EMD has desirable adaptivity and decomposition effects in signal processing for non-linear and non-smooth signals. However, the EMD method has an issue that the IMFs may interact or alias with each other during the decomposition process, i.e., the signals of different scales and frequencies appear in the same IMF component, or signals of the same scale and frequency are decomposed into multiple IMF components [
12]. Wu et al. [
13] proposed an ensemble empirical mode decomposition (EEMD) method to solve the modal aliasing problem. The EEMD method is to decompose the original signal by adding white noise several times, and then averaging the results of the multiple decompositions to obtain the final IMF. Since the EEMD method adds white noise to the original signal several times, it will cause reconstruction errors. Yeh et al. [
14] proposed a complementary ensemble empirical mode decomposition (CEEMD) method based on EEMD. The CEEMD works by adding two opposite white noise signals to the original signal for EMD decomposition. The residual white noise in the reconstructed signal is effectively eliminated under the premise of guaranteeing the decomposition effect is comparable to EEMD. However, not only do both EEMD and CEEMD have a problem with computation and storage complexity, but also the decomposition is too dependent on the amplitude of the added white noise and the number of accumulated averages. Thus, Torres et al. [
15] proposed complete ensemble empirical mode decomposition with adaptive noise (CEEMDAN), which obtains the IMF by calculating the residual signal by adding adaptive white noise at each stage of the EMD decomposition. The CEEMDAN method has complete decomposition, and the reconstruction error is very small each time, which solves the problem of the low computational efficiency of EEMD and CEEMD, and has a strong adaptability to non-smooth and non-linear signals [
16]. Therefore, for the non-linear and non-smooth signals of the FOG in the pipe-jacking inertial guidance system, the CEEMDAN method is suitable for the noise reduction. However, the traditional CEEMDAN method directly removes the high-frequency IMF components for noise reduction, which can easily cause the loss of useful high-frequency signals, and random noise and spurious IMF components may also be contained in the mid-frequency and low-frequency IMF components.
Zhao et al. [
17] propose a dynamic error compensation method for FOG based on CEEMDAN that properly separates the effective signal and dynamic error. There is no further algorithm that is added to filter out the noise signal. Wang et al. [
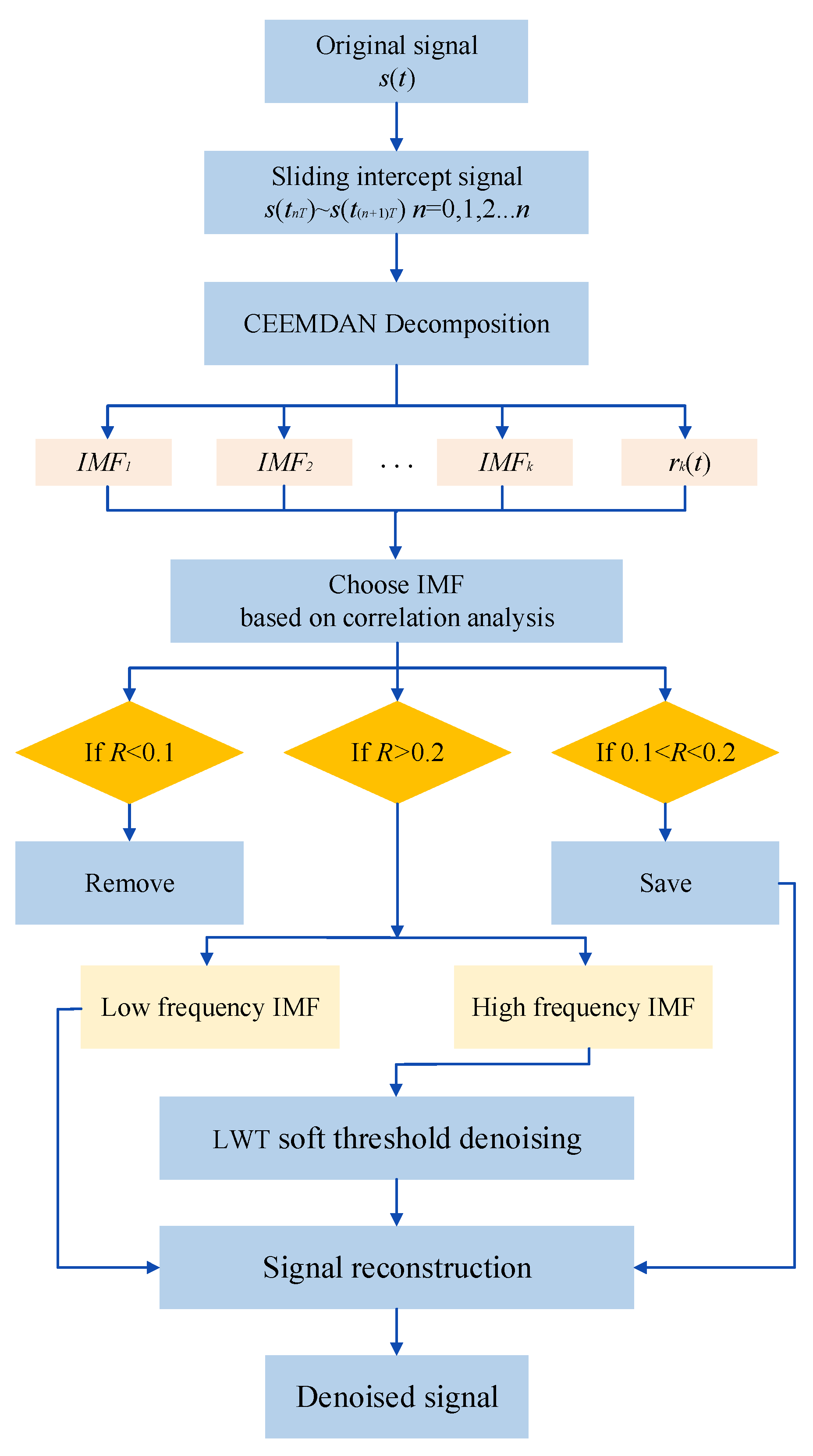
18] propose a method for constructing an FOG temperature drift compensation model based on CEEMDAN, and use an adaptive Kalman filter (AKF) to filter mixed noise, which effectively reduces temperature errors. However, the CEEMDAN has low resolution for high-frequency signals, and the Kalman filter has no ability to improve the resolution of high-frequency signals. Therefore, a CEEMDAN-LWT denoising method combining CEEMDAN and lifting wavelet transform (LWT) is proposed in this study to preprocess the noisy signals of the FOG. The useful IMF components are screened by calculating the correlation coefficient between the IMF components and the original signal. Considering the low resolution of the CEEMDAN method for high-frequency components, the high-frequency IMF components are screened for the lifting wavelet transform to increase the resolution [
19]. Then, wavelet soft threshold denoising is performed, and finally, the screened IMF components are reconstructed.
The proposed de-noising method has the complete features of CEEMDAN decomposition. At the same time, the method has the fast de-noising speed and high-resolution features of LWT decomposition. Furthermore, the method achieves the real-time processing of the FOG signal by using a sliding pane. By comparing the results of the denoising effects and Allan variance, the proposed method effectively reduces a majority of the random noise in the FOG signal within the pipe-jacking inertial guidance system. In addition, the proposed method also improves the accuracy of the pipe-jacking attitude results.
3. Simulation Signal Analysis
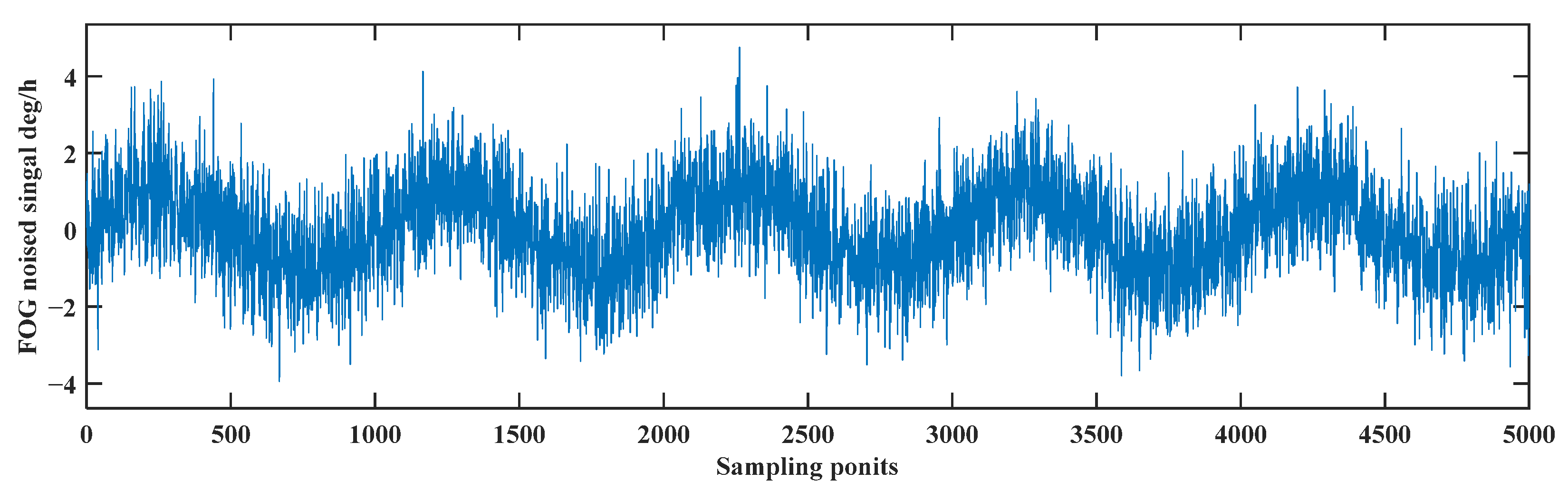
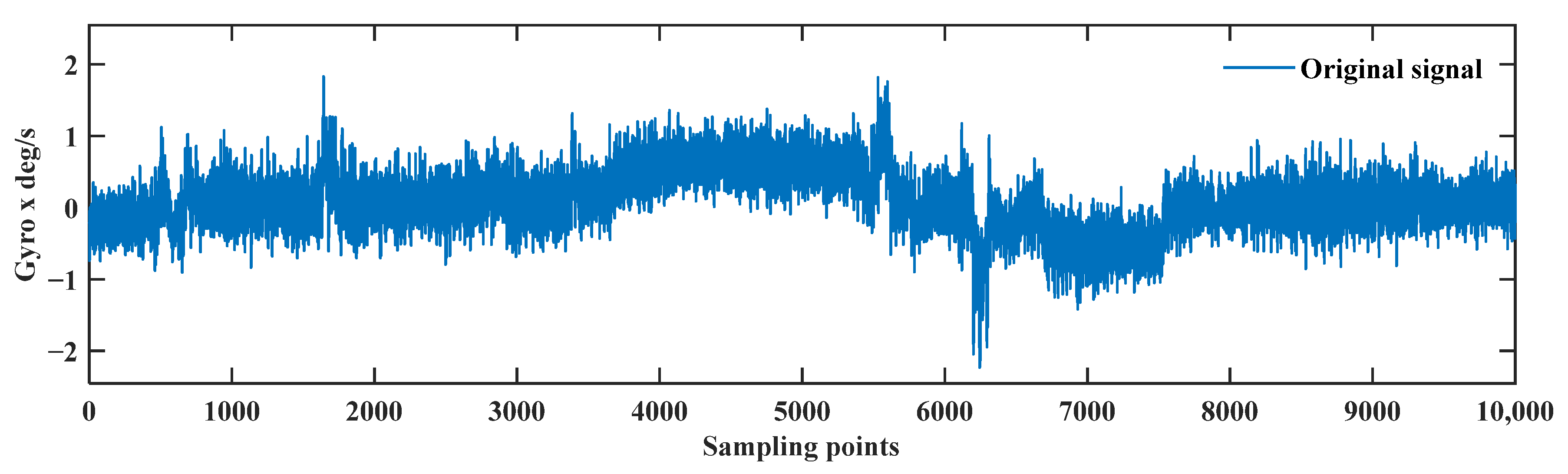
Matlab is used to simulate the FOG signal and verify the effectiveness of the CEEMDAN-LWT de-noising algorithm. The simulated signal is a sinusoidal signal with frequency of 0.1 Hz, amplitude of 1 °/h, sampling frequency of 100 Hz, and sampling time of 50 s. Then, the white noise is added; the mean value of the white noise is 0, and the variance of the white noise is 1 °/h. The noisy signal as shown in
Figure 2.
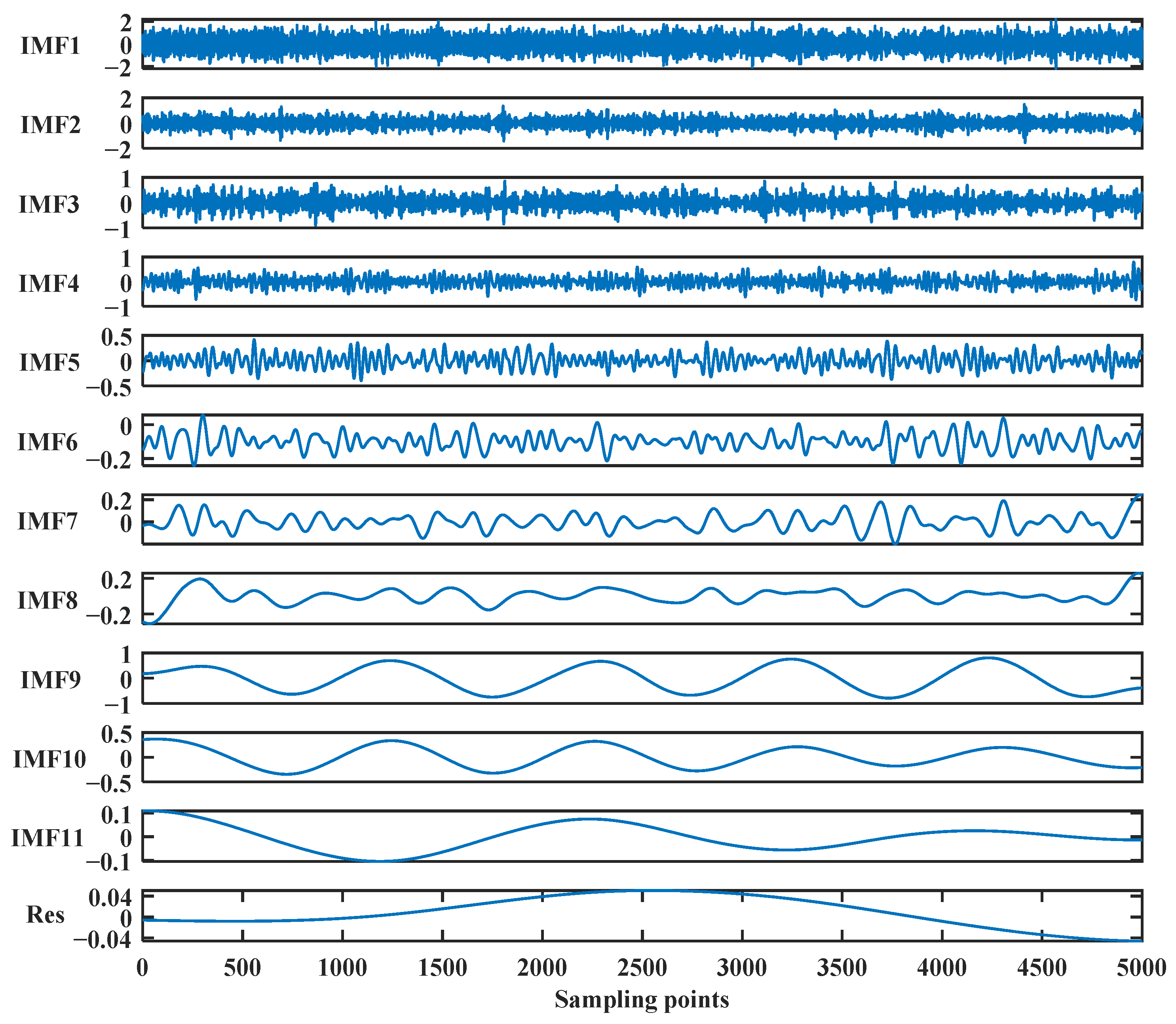
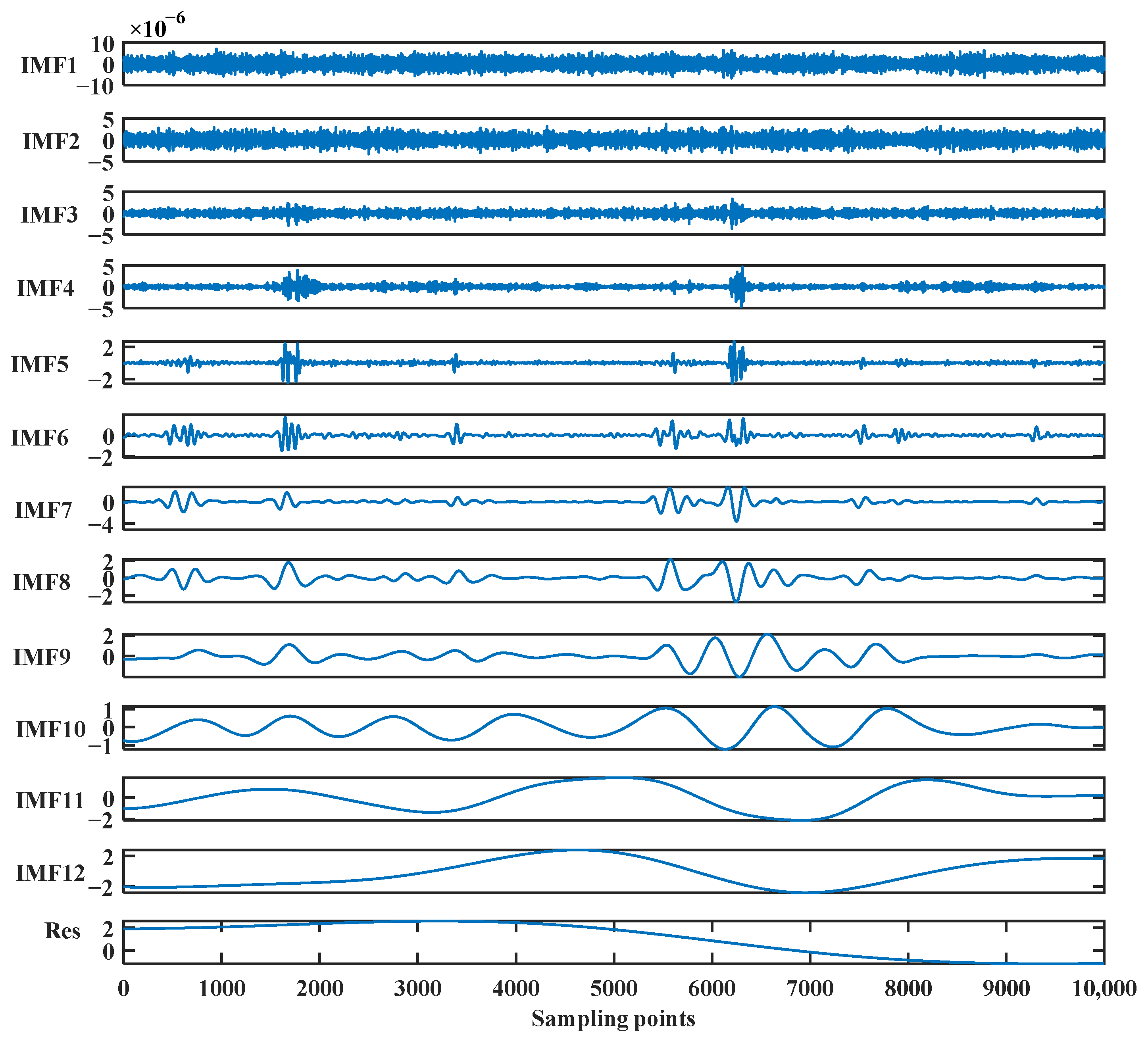
The noisy signal is subsequently conducted to CEEMDAN decomposition, resulting in 11 IMF components and a residue, shown in
Figure 3.
In
Figure 3, the frequencies of the IMF components gradually decrease from top to bottom, and the last item, Res, is the remaining residuals. It shows that the noise mainly exists in the IMF components at high frequencies, the IMF components at low frequencies contain most of the effective signal, and
IMF8 and
IMF9 are nearly close to the simulated signal. Then, the correlation between each of the obtained IMF components with the noise signal is computed, and the results of the correlation analysis are shown in
Table 1.
According to the results of correlation analysis, the high-frequency
IMF components:
IMF1,
IMF2,
IMF3, and
IMF4 with a correlation greater than 0.2 are extracted to conduct LWT soft threshold de-noising. The
IMF components with correlation coefficients less than 0.1 are removed and the other
IMF components are retained. The signal is reconstructed with the de-noised high-frequency
IMF components and the remaining
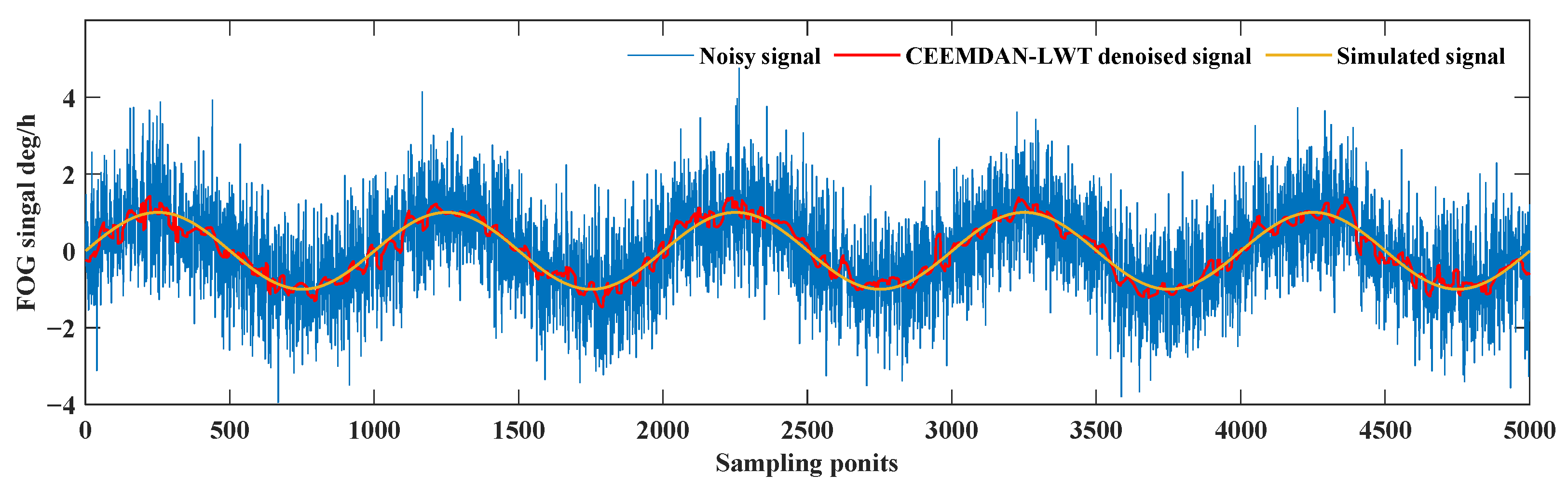
IMF components. The obtained de-noised signal is compared with the noise signal, and the simulated signal. The compared results are shown in
Figure 4.
In
Figure 4, the blue curve is the noise-containing signal, the red curve is the signal obtained after de-noising using the CEEMDAN-LWT method, and the yellow curve is the signal without noise in the simulation. The noise of the red curve is significantly reduced compared with the blue curve, and the trend of the red curve is consistent with the yellow curve. The red curve fluctuates around the yellow curve and without signal distortion proves that the algorithm proposed in this study can filter out the noise in the signals well.
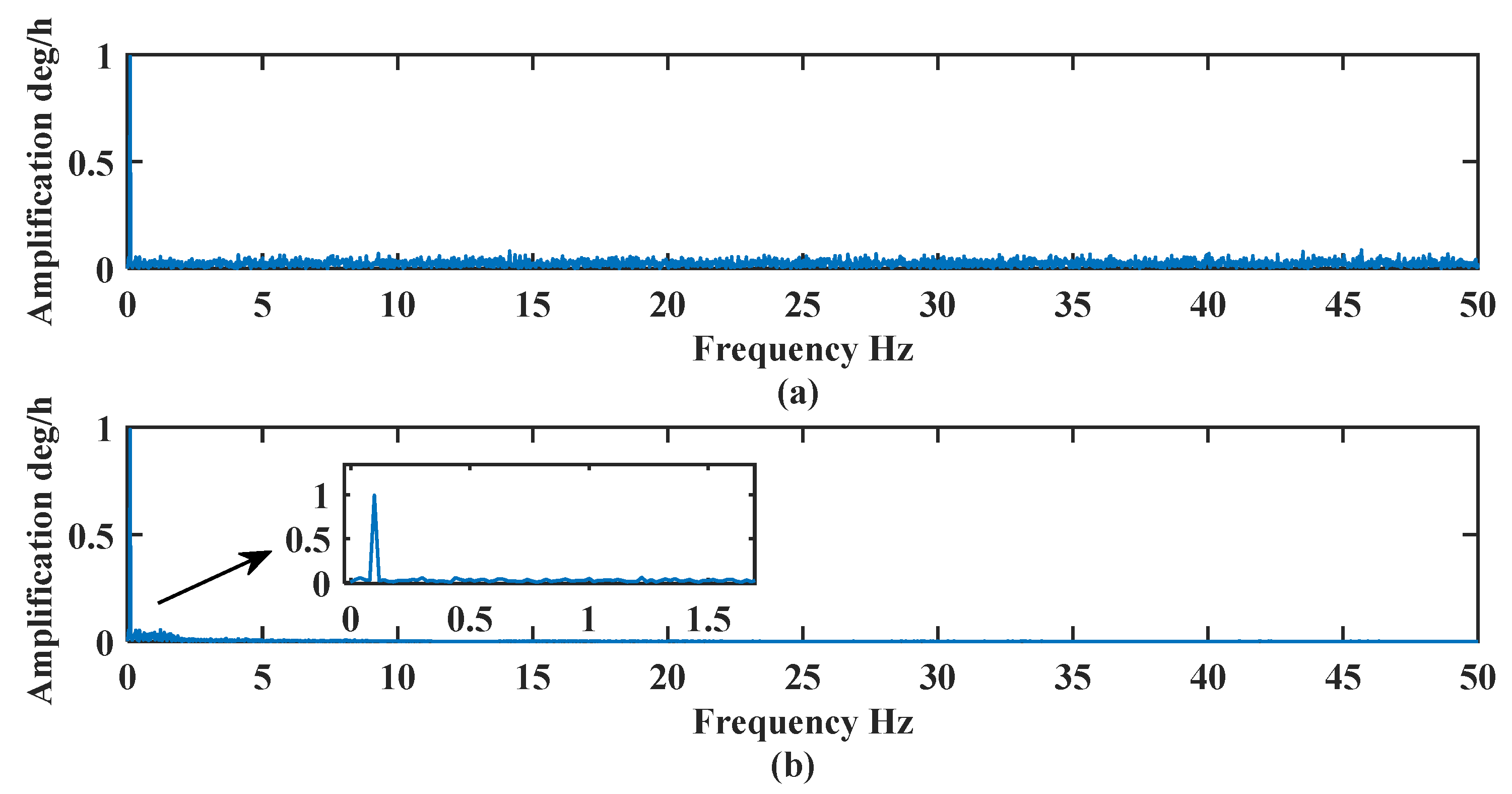
The frequency analysis is conducted on the signals before and after de-noising in
Figure 5.
In
Figure 5, the frequency of the signal after noise reduction is mainly distributed at 0~0.2 Hz, and the signal frequency set by the simulation signal is 0.1 Hz, so the effective information of the signal is better retained. The signal is better decomposed to different frequencies by the CEEMDAN-LWT and is more effective in removing the high-frequency noise. The signal after noise reduction is close to the real signal, and the features of the effective signal are retained to the maximum extent.
This study applies the signal-to-noise ratio (
SNR), standard deviation (
SD), deviation (
D) and root mean square error (
RMSE) to identify the effectiveness of the signal denoising. The equations for them are shown in below [
24].
where
is the simulated signal,
is the noise-containing signal,
is the signal after noise reduction,
is the average value of the signal after noise reduction, and
N is the number of sampling points. The larger the
SNR, the smaller the
RMSE,
SD and deviation, the better the de-noising effect. The
SNR,
RMSE, and deviation represent the de-noising effect of the simulated noise-containing signal. The de-noising effect of the signal is shown in
Table 2.
Table 2 compares CEEMDAN, LWT, and CEEMDAN-LWT methods with the de-noising effects. The CEEMDAN method removes the first two high-frequency IMF components directly, and the LWT method conducts a 5-level decomposition and soft thresholds de-noising with the signal. According to
SNR,
SD,
RESM, and
D results, CEEMDAN-LWT has the best evaluation effect, proving that the algorithm proposed in this study has a better de-noising effect.
5. Conclusions
According to the characteristics of the FOG signals in the pipe-jacking inertial guidance system, this study proposes a hybrid de-noising method based on CEEMDAN-LWT. The FOG signal is decomposed by CEEMDAN, the main IMF components are screened by correlation coefficients, the high-frequency IMF components in the screening are de-noised using LWT and soft threshold de-noising, and finally, the signal is reconstructed. Simulation, dynamic, and environmental interference experiments were conducted, which compared the analysis of the frequency and the evaluation of the de-noising effect using the CEEMDAN and LWT de-noising methods. The results show that the method proposed in this study can effectively reduce the influence of random noise on the signal and accurately reflect the changing characteristics of the signal. The de-noised pipe-jacking attitude in the environmental interference experiment was closer to the theoretical value, the absolute error of the pitch angle was reduced by 39.86%, the roll angle was reduced by 59.45%, and the heading angle was reduced by 14.29%. The maximum relative error of the pitch angle was improved from −0.74% to −0.44%, the roll angle was improved from 2.07% to 0.79%, and the heading angle was improved from −0.07% to −0.06%. In conclusion, the CEEMDAN-LWT de-noising method proposed in this study combines the CEEMDAN and LWT decomposition features, which have the advantages of complete decomposition, fast speed, and high-resolution. At the same time, the method achieves real-time processing by using a sliding window. The study results show that the proposed method could filter out most of the random noise of the FOG signal in the pipe-jacking inertial guidance system and improve the accuracy of the pipe-jacking attitude results, which has better engineering application value.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}