


Driver Drowsiness Multi-Method Detection for Vehicles with Autonomous Driving Functions


 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Drowsiness Detection System Based on EOG Signals and Face Image Analysis
2.2. System for Drowsiness Detection Based on Face Image Analysis and the Eye Aspect Ratio Algorithm (EAR)
2.3. EEG and EOG Signal Analysis
2.4. Face Image Analysis for Open or Closed Eye State Detection
2.5. Open or Closed Eye State Detection Using the EAR Algorithm
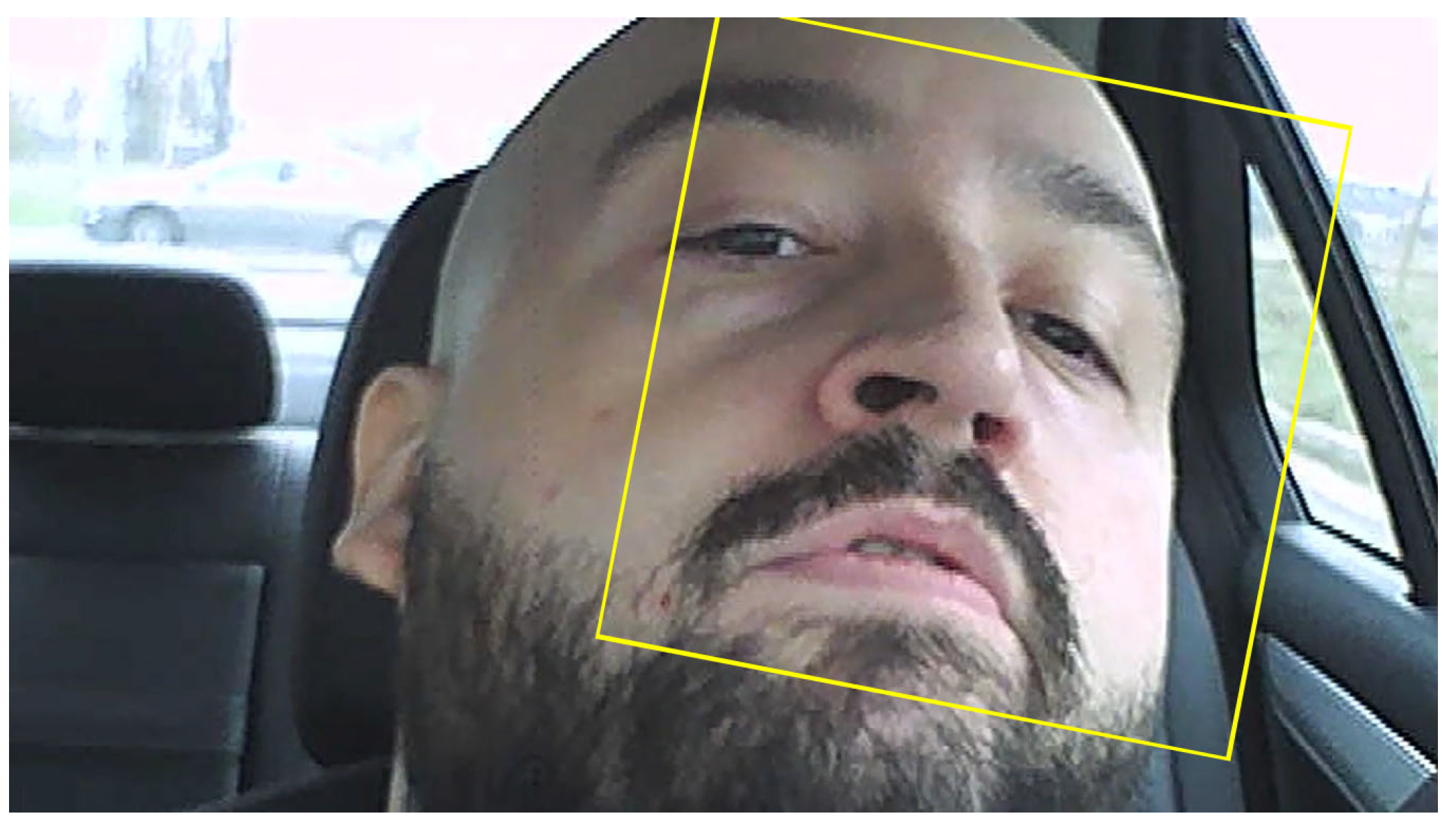
2.6. Face Detection and Tracking Algorithms
2.7. The Use of Drowsiness Detection System in Autonomous Driving
- The vehicle is used conventionally, and the driver is in full control.
- 2.
- The vehicle (especially level 2 and 3) is operated with the autonomous driving function activated (the vehicle may have control over direction of travel, acceleration, and braking).
3. Results
3.1. Results for the Face Image Analysis
3.1.1. Artificial Neural Network with One Hidden Layer
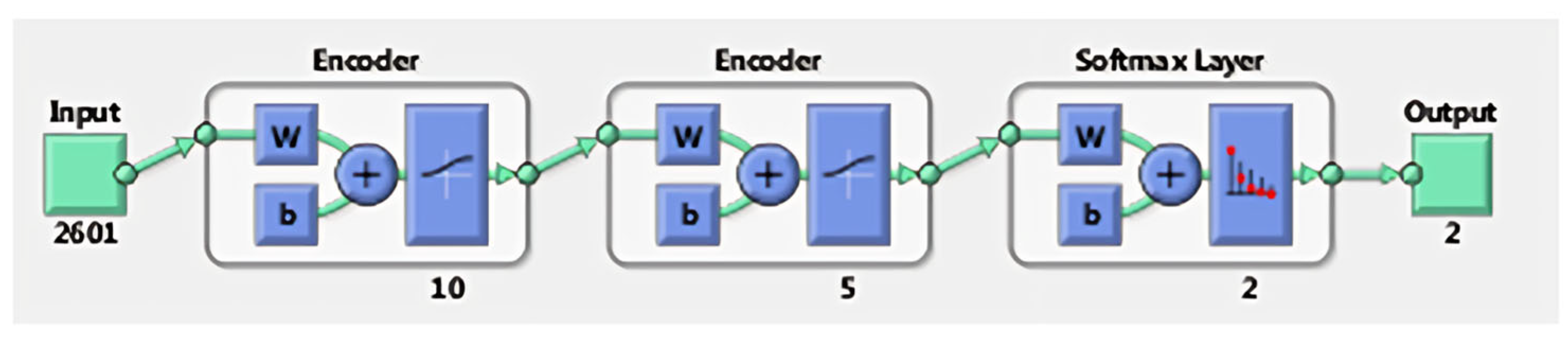
3.1.2. Deep Learning Autoencoder Neural Networks
3.2. Results for the EAR (Eye Aspect Ratio) Algorithm
3.3. Results for the Face Image Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Centers for Disease Control and Prevention. Available online: https://www.cdc.gov/sleep/features/drowsy-driving.html (accessed on 3 November 2023).
- National Highway Traffic Safety Administration. Drowsy Driving. Available online: https://www.nhtsa.gov/risky-driving/drowsy-driving (accessed on 3 November 2023).
- Tefft, B.C. Prevalence of Motor Vehicle Crashes Involving Drowsy Drivers, United States, 2009–2013 (Technical Report); AAA Foundation for Traffic Safety: Washington, DC, USA, 2014; Available online: https://aaafoundation.org/prevalence-motor-vehicle-crashes-involving-drowsy-drivers-united-states-2009-2013/ (accessed on 3 November 2023).
- European Union Mobility & Transport—Road Safety. Available online: https://road-safety.transport.ec.europa.eu/index_en (accessed on 12 December 2023).
- Shuttleworth, J. SAE Standards News: J3016 Automated-Driving Graphic Update. SAE International, 7 January 2019. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 3 November 2023).
- Marouf, M.; Saranovac, L.; Vukomanovic, G. Algorithm for EMG noise level approximation in ECG signals. Biomed. Signal Process. Control 2017, 34, 158–165. [Google Scholar] [CrossRef]
- Nagy, R.B.; Vesselenyi, T.; Popentiu-Vladicescu, F. An analysis of electro-oculogram signals processing using an artificial neural network. In Proceedings of the 13th International Conference eLearning and Software for Education, Bucharest, Romania, 27–28 April 2017; Volume III, pp. 560–567. [Google Scholar]
- Vesselenyi, T.; Rus, A.; Mitran, T.; Tataru, B.; Moldovan, O. Vehicle driver drowsiness monitoring and warning system. In Proceedings of the 13th Edition of the International Congress of Automotive and Transport Engineering, CONAT 2016 Inter-national Congress of Automotive and Transport Engineering, Brasov, Romania, 26–29 October 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 873–880. [Google Scholar]
- Vesselenyi, T.; Moca, S.; Rus, A.; Mitran, T.; Tataru, B. Driver drowsiness detection using ANN image processing. 11th Edition of The International Congress of Automotive and Transport Engineering, Pitesti, Romania. Proc. IOP Conf. Ser. Mater. Sci. Eng. 2017, 252, 012097. [Google Scholar] [CrossRef]
- Vesselenyi, T.; Dzitac, I.; Dzitac, S.; Hora, C.; Porumb, C. Preliminary Issues on Brain-Machine Contextual Communication Structure Development. In Proceedings of the IEEE Conference, 3rd International Workshop on Soft Computing Applications, Szeged, Hungary, 29 July–1 August 2009; pp. 35–40. [Google Scholar]
- Nagy, R.B.; Vesselényi, T.; Popentiu-Vladicescu, F. Results Regarding an Eog-Based Assistive Wireless Robot Control System with Visual Feedback. In Proceedings of the International Scientific Conference eLearning and Software for Education, Bu-charest, Romania, 19–20 April 2018; Volume III, pp. 453–460. [Google Scholar]
- Cardone, D.; Perpetuini, D.; Filippini, C.; Mancini, L.; Nocco, S.; Tritto, M.; Rinella, S.; Giacobbe, A.; Fallica, G.; Ricci, F.; et al. Classification of Drivers’ Mental Workload Levels: Comparison of Machine Learning Methods Based on ECG and Infrared Thermal Signals. Sensors 2022, 22, 7300. [Google Scholar] [CrossRef]
- Ebrahimian, S.; Nahvi, A.; Tashakori, M.; Salmanzadeh, H.; Mohseni, O.; Leppänen, T. Multi-Level Classification of Driver Drowsiness by Simultaneous Analysis of ECG and Respiration Signals Using Deep Neural Networks. Int. J. Environ. Res. Public Health 2022, 19, 10736. [Google Scholar] [CrossRef]
- Arefnezhad, S.; Eichberger, A.; Frühwirth, M.; Kaufmann, C.; Moser, M.; Koglbauer, I.V. Driver Monitoring of Automated Vehicles by Classification of Driver Drowsiness Using a Deep Convolutional Neural Network Trained by Scalograms of ECG Signals. Energies 2022, 15, 480. [Google Scholar] [CrossRef]
- Huang, J.; Luo, X.; Peng, X. A Novel Classification Method for a Driver’s Cognitive Stress Level by Transferring Interbeat Intervals of the ECG Signal to Pictures. Sensors 2020, 20, 1340. [Google Scholar] [CrossRef]
- Cardone, D.; Perpetuini, D.; Filippini, C.; Spadolini, E.; Mancini, L.; Chiarelli, A.M.; Merla, A. Driver Stress State Evaluation by Means of Thermal Imaging: A Supervised Machine Learning Approach Based on ECG Signal. Appl. Sci. 2020, 10, 5673. [Google Scholar] [CrossRef]
- Awais, M.; Badruddin, N.; Drieberg, M. A Hybrid Approach to Detect Driver Drowsiness Utilizing Physiological Signals to Improve System Performance and Wearability. Sensors 2017, 17, 1991. [Google Scholar] [CrossRef] [PubMed]
- Purnamasari, P.D.; Hazmi, A.Z. Heart beat based drowsiness detection system for driver. In Proceedings of the 2018 Interna-tional Seminar on Application for Technology of Information and Communication, Yogyakarta, Indonesia, 6–7 March 2018; pp. 585–590. [Google Scholar]
- Schmidt, J.; Laarousi, R.; Stolzmann, W.; Karrer-Gauß, K. Eye blink detection for different driver states in conditionally auto-mated driving and manual driving using EOG and a driver camera. Behav. Res. Methods 2017, 50, 1088–1101. [Google Scholar] [CrossRef] [PubMed]
- Vesselenyi, T.; Rus, A.; Mitran, T.; Moca, S.; Lehel, C. Fuzzy Decision Algorithm for Driver Drowsiness Detection. In Proceedings of the 30th SIAR International Congress of Automotive and Transport Engineering: Science and Management of Auto-Motive and Transportation Engineering, SMAT 2019, Craiova, Romania, 23 October 2019; Publisher Springer Link: Berlin/Heidelberg, Germany, 2020; pp. 458–467. [Google Scholar]
- Sullivan, T.J.; Deiss, S.R.; Jung, T.P.; Cauwenberghs, G. A brain-machine interface using dry-contact, low-noise EEG sensors. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems, Seattle, WA, USA, 18–21 May 2008; pp. 1986–1989. [Google Scholar]
- Daly, J.J.; Wolpaw, J.R. Brain–computer interfaces in neurological rehabilitation. Lancet Neurol. 2008, 7, 1032–1043. [Google Scholar] [CrossRef]
- Ting, J.A.; D’Souza, A.; Yamamoto, K.; Yoshioka, T.; Hoffman, D.; Kakeif, S.; Sergio, L.; Kalaska, J.; Kawato, M.; Strick, P.; et al. Variational Bayesian least squares: An application to brain—Machine interface data. Neural Netw. 2008, 21, 1112–1131. [Google Scholar] [CrossRef]
- Cvetkovic, D.; Übeyli, E.D.; Cosic, I. Wavelet transform feature extraction from human PPG, ECG, and EEG signal responses to ELF PEMF exposures: A pilot study. Digit. Signal Process. 2008, 18, 861–874. [Google Scholar] [CrossRef]
- Ting, W.; Guo-Zheng, Y.; Bang-Hua, Y.; Hong, S. EEG feature extraction based on wavelet packet decomposition for brain computer interface. Measurement 2008, 41, 618–625. [Google Scholar] [CrossRef]
- MATLAB—Mathworks, Users Manual, Neural Network Toolbox, Deep Learning, Autoencoders. 2016. Available online: https://www.mathworks.com/help/ (accessed on 12 February 2024).
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Proc. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Camden, M.C.; Hickman, J.S.; Soccolich, S.A.; Hanowski, R.J. Identifying Equipment Factors Associated with Snowplow Operator Fatigue. Safety 2019, 5, 62. [Google Scholar] [CrossRef]
- Bengio, Y.; Lamblin, P.; Popovici, D.; Larochelle, H. Greedy layer-wise training of deep networks. Proc. Adv. Neural Inf. Process. Syst. 2006, 19. [Google Scholar] [CrossRef]
- Rosebrock, A. Drowsiness Detection with OpenCV. 8 May 2017. Available online: https://www.pyimagesearch.com/2017/05/08/drowsiness-detection-opencv (accessed on 10 December 2023).
- Kazemi, V.; Sullivan, J. One millisecond face alignment with an ensemble of regression trees. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1867–1874. [Google Scholar]
- Soukupova, T.; Cech, J. Eye blink detection using facial landmarks. In Proceedings of the 21st Computer Vision Winter Work-shop, Rimske Toplice, Slovenia, 3–5 February 2016. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Kauai, HI, USA, 8–14 December 2001; Volume 1, pp. 1–9. [Google Scholar]
- Jianbo, S.; Tomasi, C. Good features to track. In Proceedings of the Computer Society Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Tomasi, C.; Kanade, T. Detection and tracking of point. Int. J. Comput. Vis. 1991, 9, 137–154. [Google Scholar] [CrossRef]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Forward-backward error: Automatic detection of tracking failures. In Proceedings of the 20th International Conference on Pattern Recognition, Istambul, Turkey, 23–26 August 2010; pp. 2756–2759. [Google Scholar]
- Mansour, H.B.; Slimane, A.B.; Fournier, R.; Nait-Ali, A. 3D geometric human face modeling. In Proceedings of the International Conference on Human-Machine Interaction, Chennai, India, 27–30 August 2013; pp. 183–187. [Google Scholar]
- Mohamed, G.M.; Patel, S.S.; Naicker, N. Data Augmentation for Deep Learning Algorithms that Perform Driver Drowsiness Detection. Int. J. Adv. Comput. Sci. Appl. 2023, 14, 233–248. [Google Scholar] [CrossRef]
- Vesselenyi, T.; Rus, A.; Mitran, T.A.; Tătaru, M.B.; Moca, S. Monitoring and alert system: Neuro-fuzzy decision algorithm based on biological signals acquired from vehicle drivers. Rom. J. Automot. Eng. 2019, 25, 77–82. [Google Scholar]
- Albadawi, Y.; Takruri, M.; Awad, M. A review of recent developments in driver drowsiness detection systems. Sensors 2022, 22, 2069. [Google Scholar] [CrossRef]
- Doudou, M.; Bouabdallah, A.; Berge-Cherfaoui, V. Driver drowsiness measurement technologies: Current research, market solutions, and challenges. Int. J. Intell. Transp. Syst. Res. 2020, 18, 297–319. [Google Scholar] [CrossRef]
- Stancin, I.; Cifrek, M.; Jovic, A. A review of EEG signal features and their application in driver drowsiness detection systems. Sensors 2021, 21, 3786. [Google Scholar] [CrossRef] [PubMed]
- Denton, T. Automated Driving and Driver Assistance Systems, 1st ed.; Routledge: Abingdon-on-Thames, UK, 2019. [Google Scholar]
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Autonomous Driving: Technical, Legal and Social Aspects; Springer Open: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Regulation (EU) 2019/2144 of the European Parliament and of the Council. Explanatory Memorandum. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=PI_COM:C(2021)2639&from=EN (accessed on 14 December 2023).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day and Route No. | Total Sleep before Test | Route [km] | Driving (Recording) Time [min] | Weather | Time Interval | Comments |
|---|---|---|---|---|---|---|
| 1 | 8 h | Oradea -> Turda -> Oradea (381 km) | 332 min | cloudy | 7:00 A.M.–2:00 P.M. | No/weak signs of fatigue |
| 2 | 5 h 30 min | Oradea -> Arad -> Oradea (229 km) | 200 min | cloudy/sunny | 8:00 A.M.–11:45 A.M. | More frequent signs of fatigue |
| 3 | 6 h | Oradea -> Carei -> Oradea (204 km) | 175 min | rainy | 11:00 A.M.–2:10 P.M. | Frequent signs of fatigue |
| 4 | 7 h 30 min | Oradea -> Carei -> Oradea (204 km) | 180 min | cloudy and rainy | 11:00 A.M.–2:15 P.M. | Frequent signs of fatigue and lack of attention |
| EEG/EOG | Face Tracking-Recognition | EAR | Result | ||
|---|---|---|---|---|---|
| L | and | L | and | L | drowsy |
| L | and | L | and | H | drowsy |
| L | and | H | and | H | alert |
| H | and | H | and | H | alert |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beles, H.; Vesselenyi, T.; Rus, A.; Mitran, T.; Scurt, F.B.; Tolea, B.A. Driver Drowsiness Multi-Method Detection for Vehicles with Autonomous Driving Functions. Sensors 2024, 24, 1541. https://doi.org/10.3390/s24051541
Beles H, Vesselenyi T, Rus A, Mitran T, Scurt FB, Tolea BA. Driver Drowsiness Multi-Method Detection for Vehicles with Autonomous Driving Functions. Sensors. 2024; 24(5):1541. https://doi.org/10.3390/s24051541
Chicago/Turabian StyleBeles, Horia, Tiberiu Vesselenyi, Alexandru Rus, Tudor Mitran, Florin Bogdan Scurt, and Bogdan Adrian Tolea. 2024. "Driver Drowsiness Multi-Method Detection for Vehicles with Autonomous Driving Functions" Sensors 24, no. 5: 1541. https://doi.org/10.3390/s24051541
APA StyleBeles, H., Vesselenyi, T., Rus, A., Mitran, T., Scurt, F. B., & Tolea, B. A. (2024). Driver Drowsiness Multi-Method Detection for Vehicles with Autonomous Driving Functions. Sensors, 24(5), 1541. https://doi.org/10.3390/s24051541