


Crop Leaf Phenotypic Parameter Measurement Based on the RKM-D Point Cloud Method

Abstract
:1. Introduction
- (1)
- Point cloud processing method
- (2)
- Methods for measuring phenotypic parameters
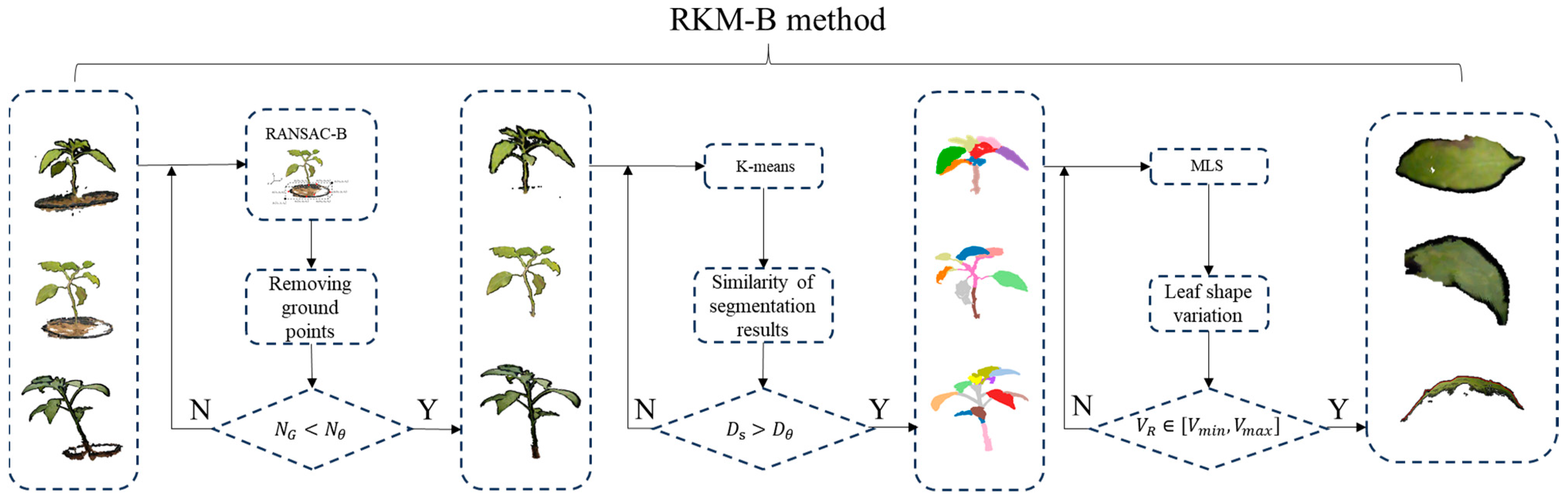
2. Materials and Methods
2.1. Experimental Design
2.2. Point Cloud Acquisition Method
2.3. Point Cloud Processing Method
2.3.1. RANSAC-B-Based Ground Points Removal
2.3.2. K-Means Based Segmentation
2.3.3. MLS-Based Point Cloud Smoothing
2.4. Euclidean-Distance-Based Phenotypic Parameter Measurement
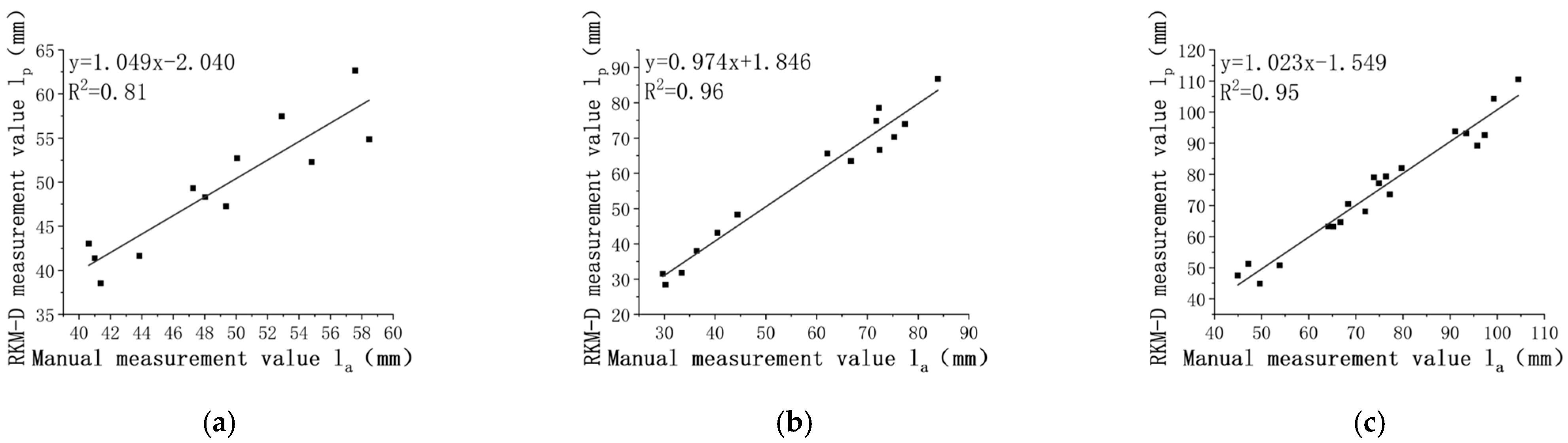
2.4.1. Leaf Length
- (1)
- Manual leaf length measurement
- (2)
- Euclidean-distance-based leaf length measurement
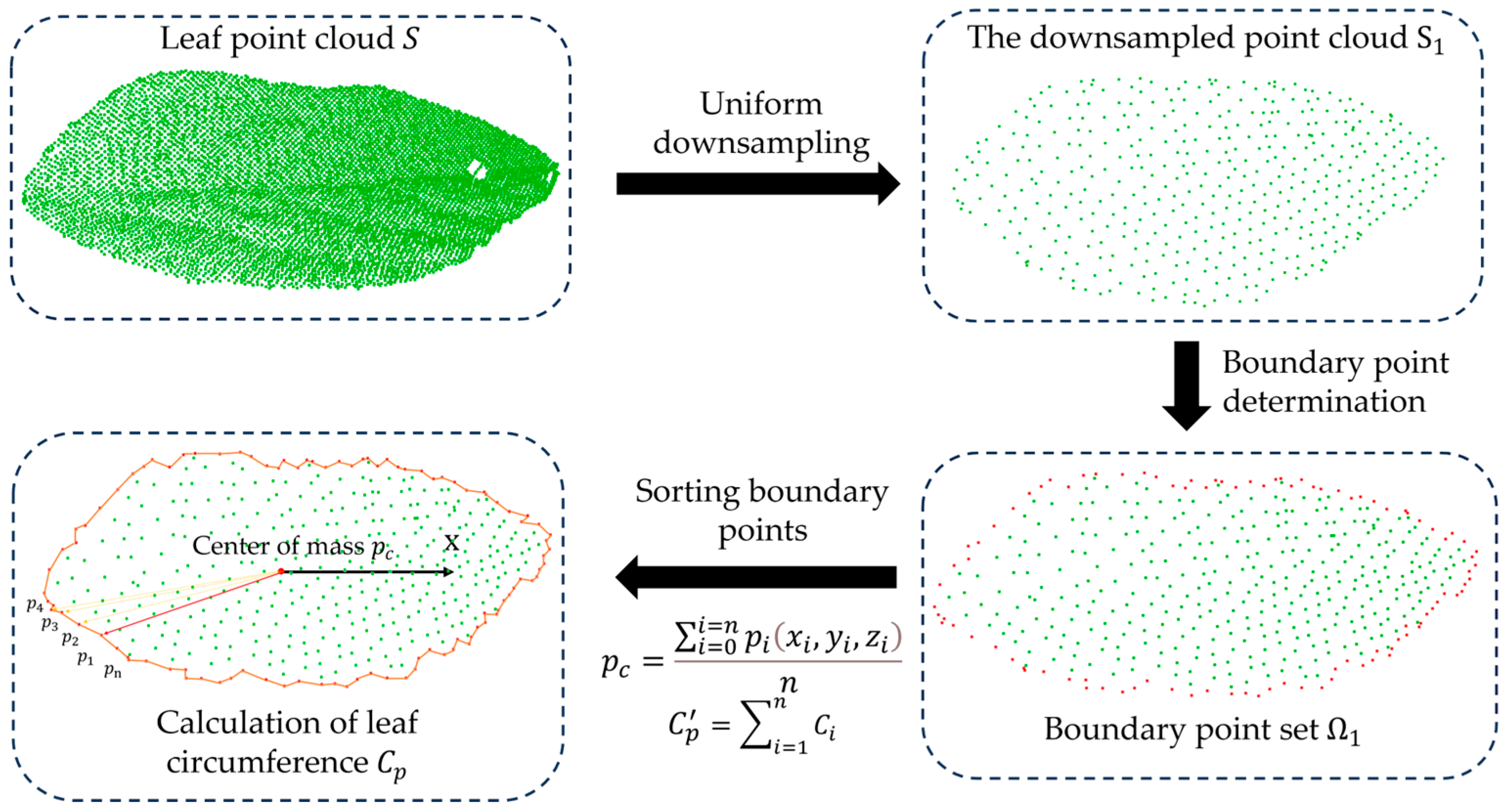
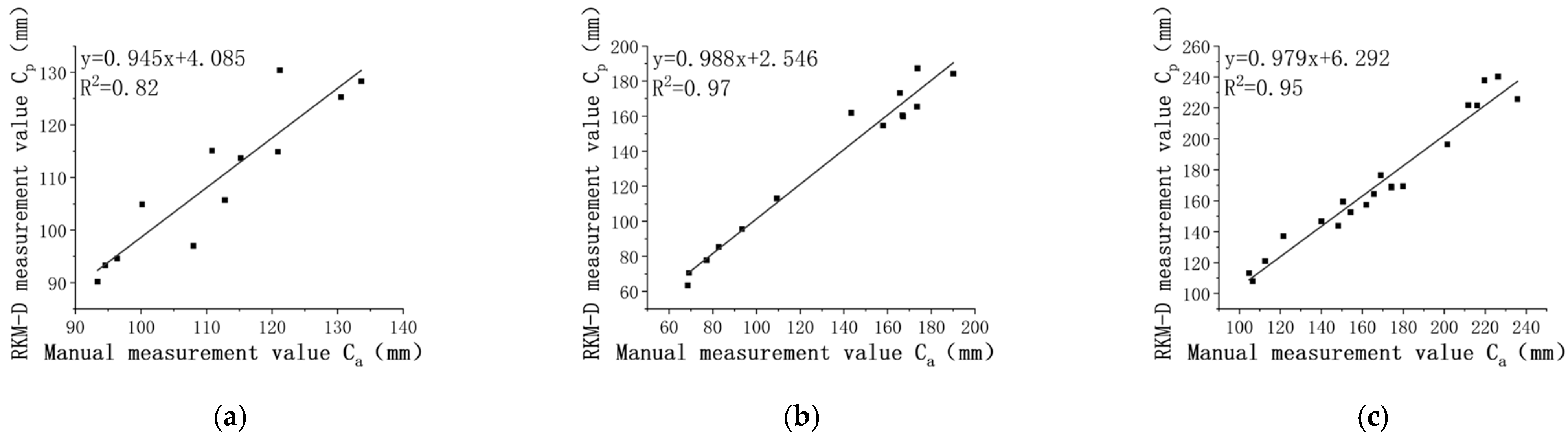
2.4.2. Leaf Perimeter
- (1)
- Manual leaf perimeter measurement
- (2)
- Euclidean-distance-based leaf perimeter measurement
2.4.3. Leaf Area
- (1)
- Manual leaf area measurement
- (2)
- Euclidean-distance-based leaf area measurement
3. Results and Discussion
3.1. Point Cloud Acquisition
3.2. RKM-B-Based Point Cloud Processing
3.3. Leaf Length Measurement
3.4. Leaf Perimeter Measurement
3.5. Leaf Area Measurement
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Wang, L.; Jin, X.; Bian, L.; Ge, Y. High-throughput phenotyping of plant leaf morphological, physiological, and biochemical traits on multiple scales using optical sensing. Crop J. 2023, 11, 1279–1610. [Google Scholar] [CrossRef]
- Yang, W.; Guo, Z.; Huang, C.; Wang, K.; Jiang, N.; Feng, H.; Chen, G.; Liu, Q.; Xiong, L. Genome-wide association study of rice (Oryza sativa L.) leaf traits with a high-through put leaf scorer. J. Exp. Bot. 2015, 66, 5605–5615. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Guo, R.; Li, M.; Chen, Y.; Li, G. A review of computer vision technologies for plant phenotyping. Comput. Electron. Agric. 2020, 176, 105672. [Google Scholar] [CrossRef]
- Che, Y.; Wang, Q.; Xie, Z.; Li, S.; Zhu, J.; Li, B.; Ma, Y. High-quality images and data augmentation based on inverse projection transformation significantly improve the estimation accuracy of biomass and leaf area index. Comput. Electron. Agric. 2023, 212, 108144. [Google Scholar] [CrossRef]
- Chen, H.; Liu, S.; Wang, C.; Wang, C.; Gong, K.; Li, Y.; Lan, Y. Point Cloud Completion of Plant Leaves under Occlusion Conditions Based on Deep Learning. Plant Phenomics 2023, 5, 0117. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Cao, H.; Pei, S.; Li, M. Optimum leaf based on photosynthesis and fluorescence parameters of pepper seedlings under drought stress. Agric. Res. Arid Areas 2022, 40, 33–40. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, L.; Xiang, L.; Wu, Q.; Jiang, H. Automatic non-destructive growth measurement of leafy vegetables based on Kinect. Sensors 2018, 18, 806. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Li, X.; Zhou, Y.; Wang, H.; Li, M. Banana Pseudostem Width Detection Based on Kinect V2 Depth Sensor. Comput. Intell. Neurosci. 2022, 2022, 10. [Google Scholar] [CrossRef]
- Wang, R.; Liu, D.; Wang, X.; Yang, H. Segmentation and measurement of key phenotype for Chinese cabbage sprout using multi-view geometry. Trans. Chin. Soc. Agric. Eng. 2022, 38, 243–251. [Google Scholar] [CrossRef]
- Boogaard, F.P.; van Henten, E.J.; Kootstra, G. The added value of 3D point clouds for digital plant phenotyping–A case study on internode length measurements in cucumber. Biosyst. Eng. 2023, 234, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Liu, J.; Zhang, B.; Wang, Y.; Yao, J.; Zhang, X.; Fan, B.; Li, X.; Hai, Y.; Fan, X. Three dimensional reconstruction and phenotype measurement of maize seedlings based on multi-view image sequences. Front. Plant Sci. 2022, 13, 974339. [Google Scholar] [CrossRef]
- Su, B.; Liu, Y.; Wang, Z.; Mi, Z.; Wang, F. Leaf Area Estimation Method Based on Three-dimensional Point Cloud. Trans. Chin. Soc. Agric. Mach. 2019, 50, 240–246, 254. [Google Scholar] [CrossRef]
- Yin, Y.; Wan, W.; Liu, R. Filtering outliers using statistical analysis on neighbors distance. IET Int. Conf. Smart Sustain. City 2013, 2013, 149–152. [Google Scholar] [CrossRef]
- Qian, X.; Ye, C. NCC-RANSAC: A Fast Plane Extraction Method for 3-D Range Data Segmentation. IEEE Trans. Cybern. 2014, 44, 2771–2783. [Google Scholar] [CrossRef]
- Peng, C.; Li, S.; Miao, Y.; Zhang, Z.; Zhang, M.; Li, H. Stem-leaf segmentation and phenotypic trait extraction of tomatoes using three-dimensional point cloud. Trans. Chin. Soc. Agric. Eng. 2022, 38, 187–194. [Google Scholar] [CrossRef]
- Guo, C.; Wang, X.; Shi, C.; Jin, H. Corn Leaf Image Segmentation Based on Improved Kmeans Algorithm. J. North Univ. China 2021, 42, 524–529. [Google Scholar] [CrossRef]
- Li, W.-L.; Xie, H.; Zhang, G.; Li, Q.-D.; Yin, Z.-P. Adaptive Bilateral Smoothing for a Point-Sampled Blade Surface. IEEE-ASME Trans. Mechatron. 2016, 21, 2805–2816. [Google Scholar] [CrossRef]
- Kang, C.; Shi, M.; Chen, Y.; Chen, J.; Zhang, L. A Smoothing De-noising Method Considering Multi-scale Noise. Sci. Technol. Eng. 2018, 18, 110–116. [Google Scholar] [CrossRef]
- He, J.Q.; Harrison, R.J.; Li, B. A novel 3D imaging system for strawberry phenotyping. Plant Methods 2017, 13, 93. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Ma, S.; Wang, Y.; Hu, H.; Yin, J.; Che, J. Three-dimensional Estimation of Money Plant Leaf External Phenotypic Parameters Based on Geometric Model. Trans. Chin. Soc. Agric. Mach. 2020, 51, 220–228. [Google Scholar] [CrossRef]
- Jing, W.; Jie, J. Classification and denoising system for three-dimensional laser scanning point cloud data using wavelet transform technology. Autom. Instrum. 2023, 6, 35–39. [Google Scholar] [CrossRef]
- Dror, A.; Niloy, J.; Daniel, C. 4-Points Congruent Sets for Robust Pairwise Surface Registration. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]
- Besl, P.J.; Mckay, H.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Kanungo, T.; Mount, D.M.; Netanyahu, N.S.; Piatko, C.D.; Silverman, R.; Wu, A.Y. An efficient k-means clustering algorithm: Analysis and implementation. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 881–892. [Google Scholar] [CrossRef]
- Xiao, Z.; Gao, J.; Wu, D.; Zhang, L. A Uniform Downsampling Method for Three-Dimensional Point Clouds Based on Voxel Grids. Mach. Des. Manuf. 2023, 08, 180–184. [Google Scholar] [CrossRef]
- Han, Y.; Hou, H.; Bai, Y.; Zhu, X. A closed point cloud edge extraction algorithm using edge coefficient. Laser Optoeletronics Process 2018, 55, 155–160. [Google Scholar] [CrossRef]
- Bernardini, F.; Mittleman, J.; Rushmeier, H.; Silva, C.; Taubin, G. The ball-pivoting algorithm for surface reconstruction. IEEE Trans. Vis. Comput. Graph. 1999, 5, 349–359. [Google Scholar] [CrossRef]
- Rand, W.M. Objective Criteria for the Evaluation of Clustering Methods. J. Am. Stat. Assoc. 1971, 66, 846–850. [Google Scholar] [CrossRef]
- Sun, J.; Ding, Y.; Wang, N.; Xi, J.; Zhu, X. Identification Algorithm for Inner Surface of Bowl-shaped Broken Pieces Based on Point Cloud Proportion and Smoothness. J. Harbin Univ. Sci. Technol. 2020, 25, 157–161. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Time Consuming (s) | |||||
|---|---|---|---|---|---|---|
| R | K | M | Total | |||
| 14th day | RKM | 1.58 | 1.41 | 0.52 | 3.51 | 0.032 |
| RKM-B | 0.96 | 0.39 | 0.49 | 1.84 | 0.035 | |
| Original | / | / | / | / | 0.029 | |
| 28th day | RKM | 1.73 | 1.57 | 0.43 | 3.73 | 0.024 |
| RKM-B | 0.97 | 0.56 | 0.41 | 1.62 | 0.028 | |
| Original | / | / | / | / | 0.020 | |
| 42nd day | RKM | 2.28 | 2.52 | 1.55 | 6.35 | 0.022 |
| RKM-B | 0.73 | 1.79 | 1.59 | 4.11 | 0.024 | |
| Original | / | / | / | / | 0.017 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, W.; Li, Y.; Deng, M.; Han, N.; Guo, X. Crop Leaf Phenotypic Parameter Measurement Based on the RKM-D Point Cloud Method. Sensors 2024, 24, 1998. https://doi.org/10.3390/s24061998
Mu W, Li Y, Deng M, Han N, Guo X. Crop Leaf Phenotypic Parameter Measurement Based on the RKM-D Point Cloud Method. Sensors. 2024; 24(6):1998. https://doi.org/10.3390/s24061998
Chicago/Turabian StyleMu, Weiyi, Yuanxin Li, Mingjiang Deng, Ning Han, and Xin Guo. 2024. "Crop Leaf Phenotypic Parameter Measurement Based on the RKM-D Point Cloud Method" Sensors 24, no. 6: 1998. https://doi.org/10.3390/s24061998
APA StyleMu, W., Li, Y., Deng, M., Han, N., & Guo, X. (2024). Crop Leaf Phenotypic Parameter Measurement Based on the RKM-D Point Cloud Method. Sensors, 24(6), 1998. https://doi.org/10.3390/s24061998