

Learning-Based Control of Autonomous Vehicles Using an Adaptive Neuro-Fuzzy Inference System and the Linear Matrix Inequality Approach



Abstract
:1. Introduction
- Attaining close to zero traffic accidents.
- Improving accessibility for people with low physical mobility.
- Lessening congestion through shared routes for both passengers and goods, coupled with intelligent motion.
- Lowering energy consumption and pollution [1].
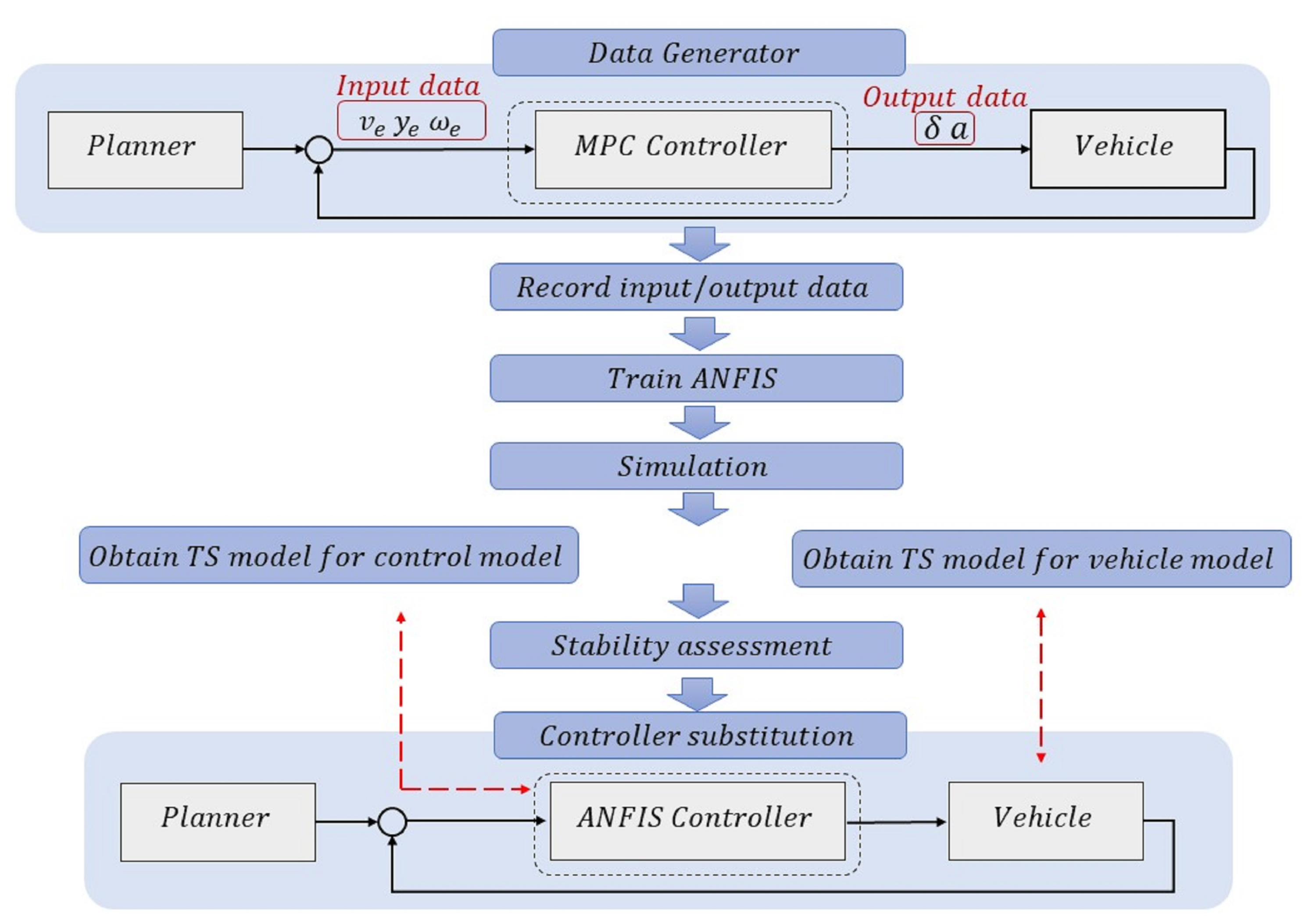
2. Proposed Approach
- -
- Step 1: Generate the input and output data.
- -
- Step 2: Employ the ANFIS to learn the control law from the data.
- -
- Step 3: Validate the learned controller through simulation.
- -
- Step 4: Obtain the TS model of the control model and vehicle model.
- -
- Step 5: Stability proof of the closed-loop system.
2.1. Generate the Input and Output Data
2.2. Employ ANFIS to Learn the Control Law from the Data
2.3. Validate the Learned Controller through Simulation
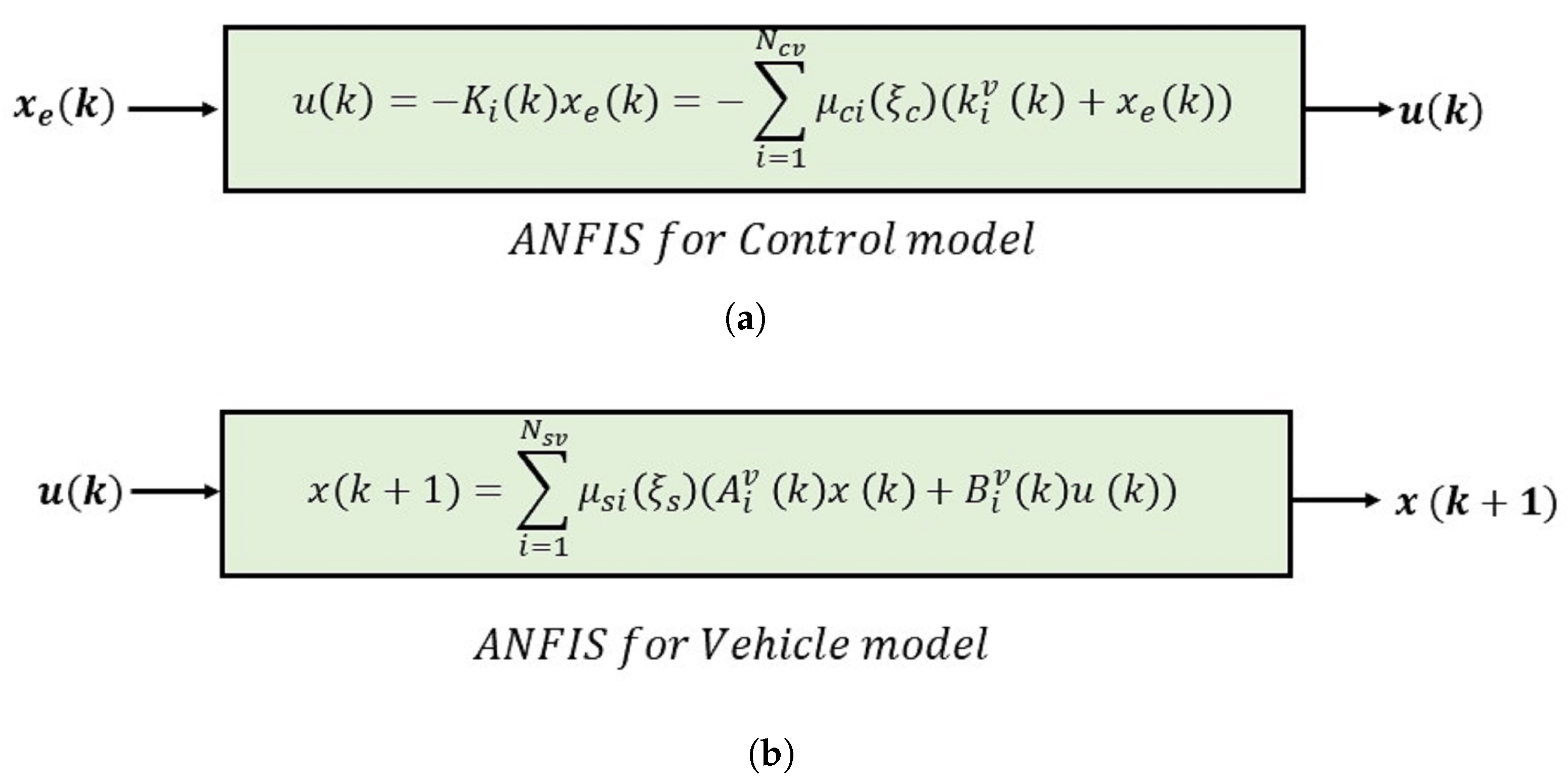
2.4. Obtain the Takagi–Sugeno Model of the Control Model and Vehicle Model
2.5. Stability Proof of the Closed-Loop System
3. Learning-Based Control Design Description
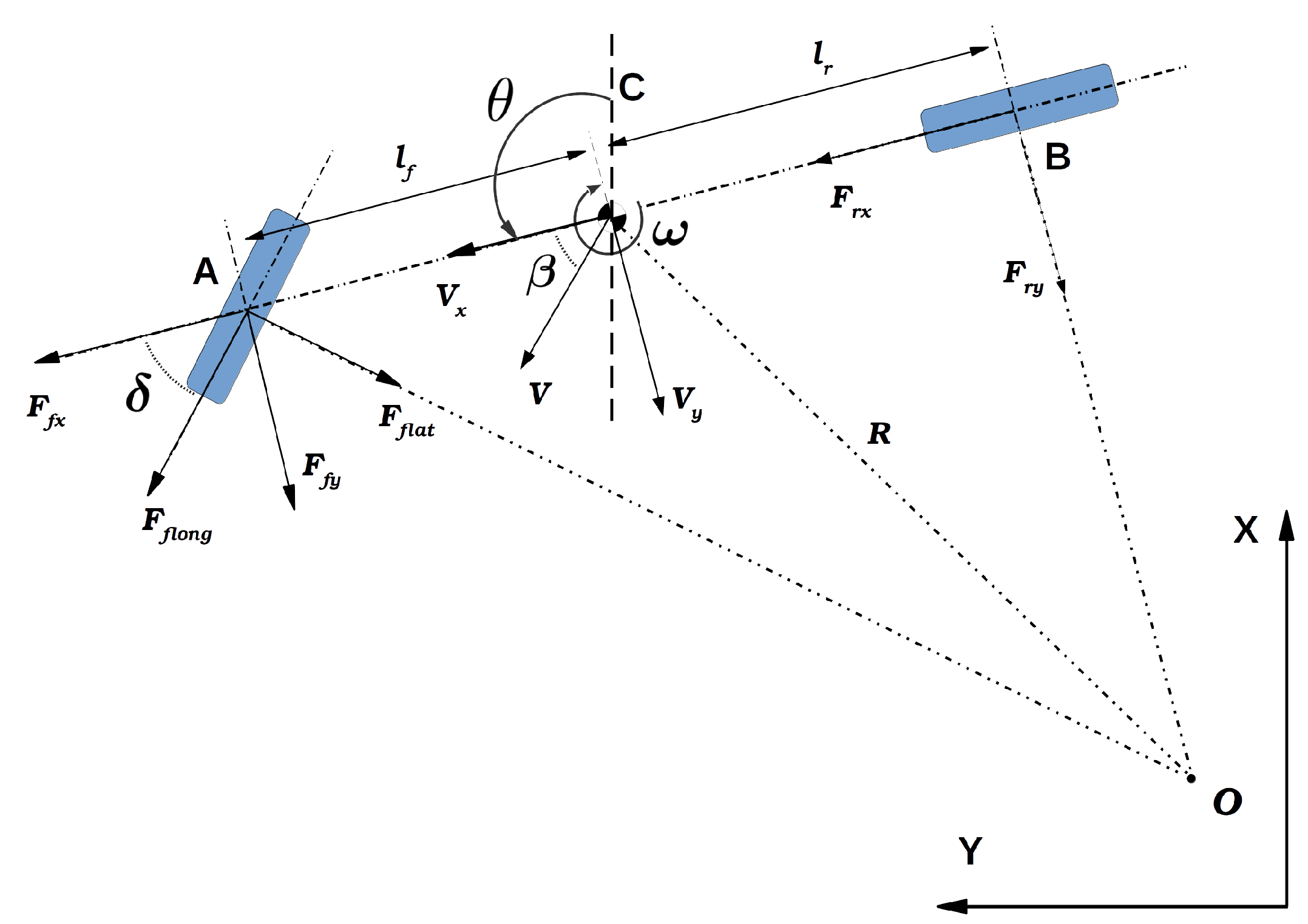
3.1. Considered Autonomous Vehicle

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Longitudinal velocity of the vehicle in the center of gravity (CoG) frame (C) in ; see Figure 4. | |
| Lateral velocity of the vehicle in the (CoG) frame (C) in . | |
| Angular velocity of the vehicle in the (CoG) frame (C) in . | |
| X | Global position of the vehicle in the x-axis frame (O) in . |
| Y | Global position of the vehicle in the y-axis frame (O) in . |
| Orientation of the vehicle with respect to the x-axis of the frame (O) in . | |
| a | Longitudinal acceleration vector on the rear wheels in . |
| Steering angle on the front wheels in . |

| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.1377 m | 45 | ||
| 0.1203 m | 45 | ||
| m | 2.424 kg | I | 0.02 kg |
| b | 6.0 | c | 1.6 |
| d | 7.76 | 0.006 |
3.2. Generate the Input and Output Data
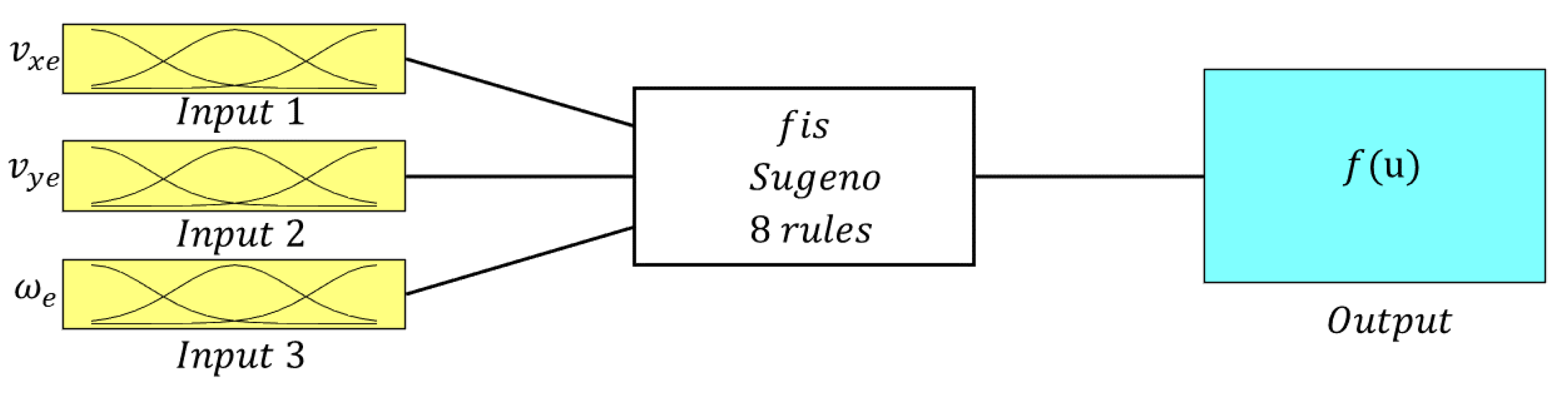
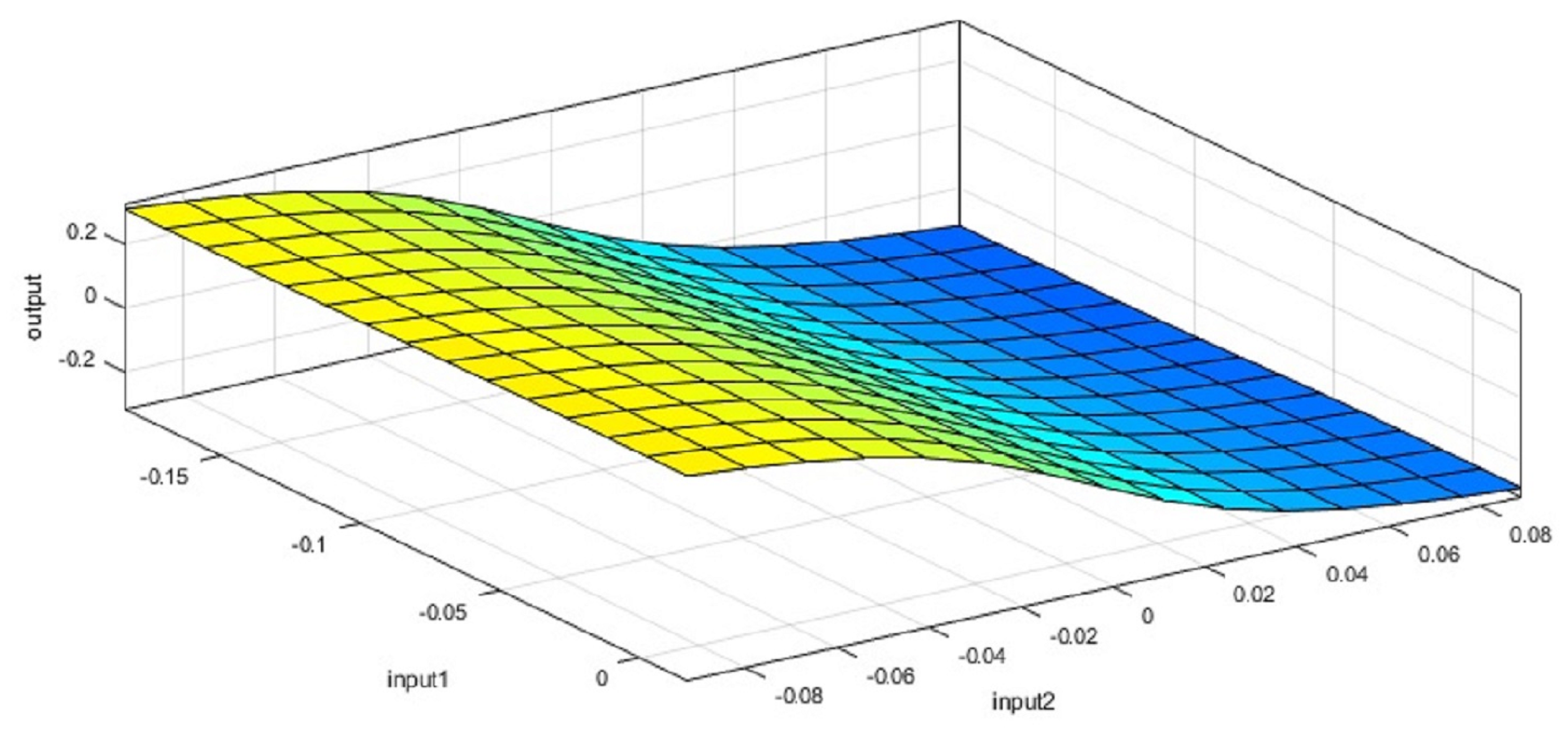
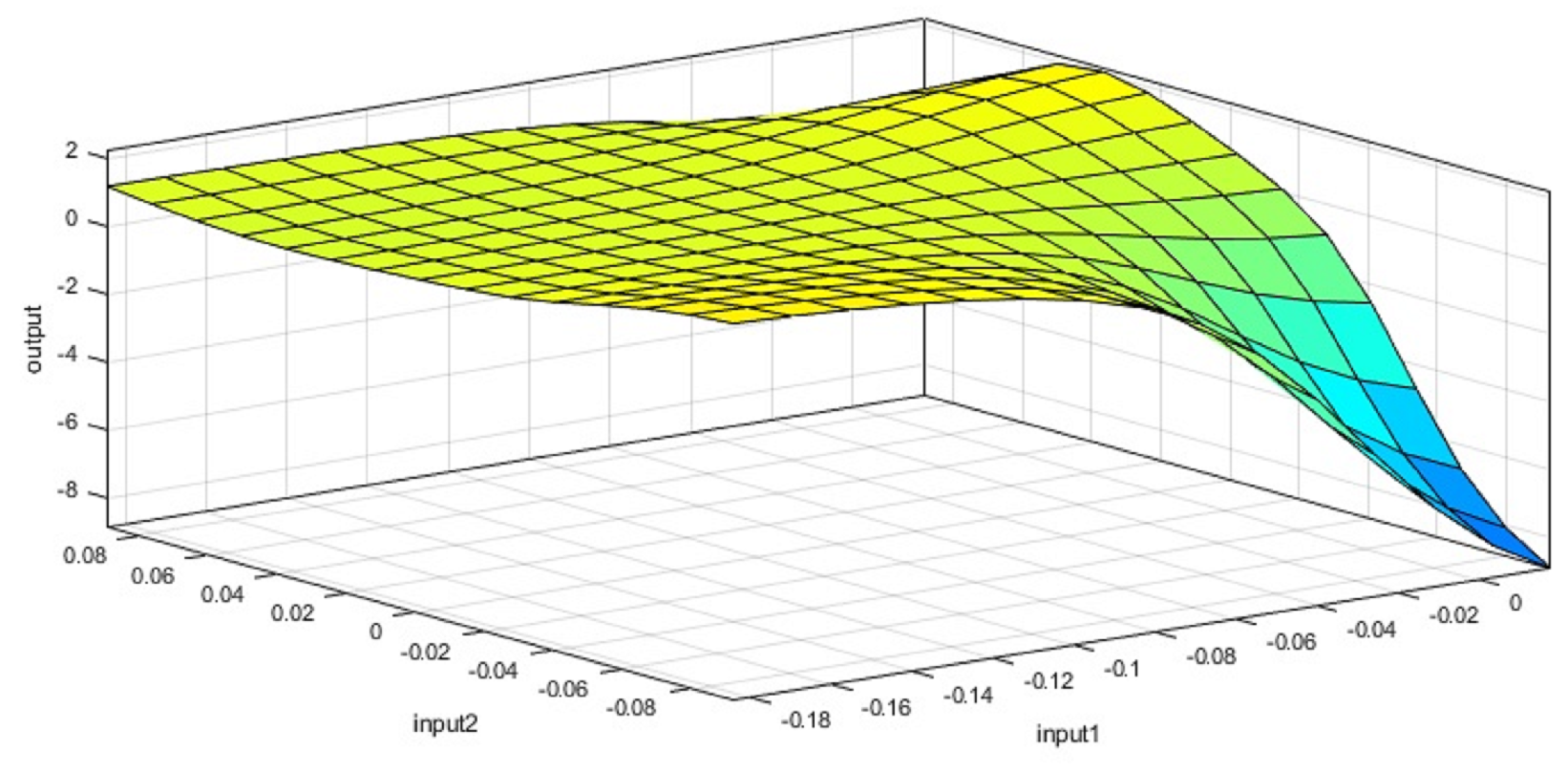
3.3. Learn the Control Law from Data Using the ANFIS Algorithm

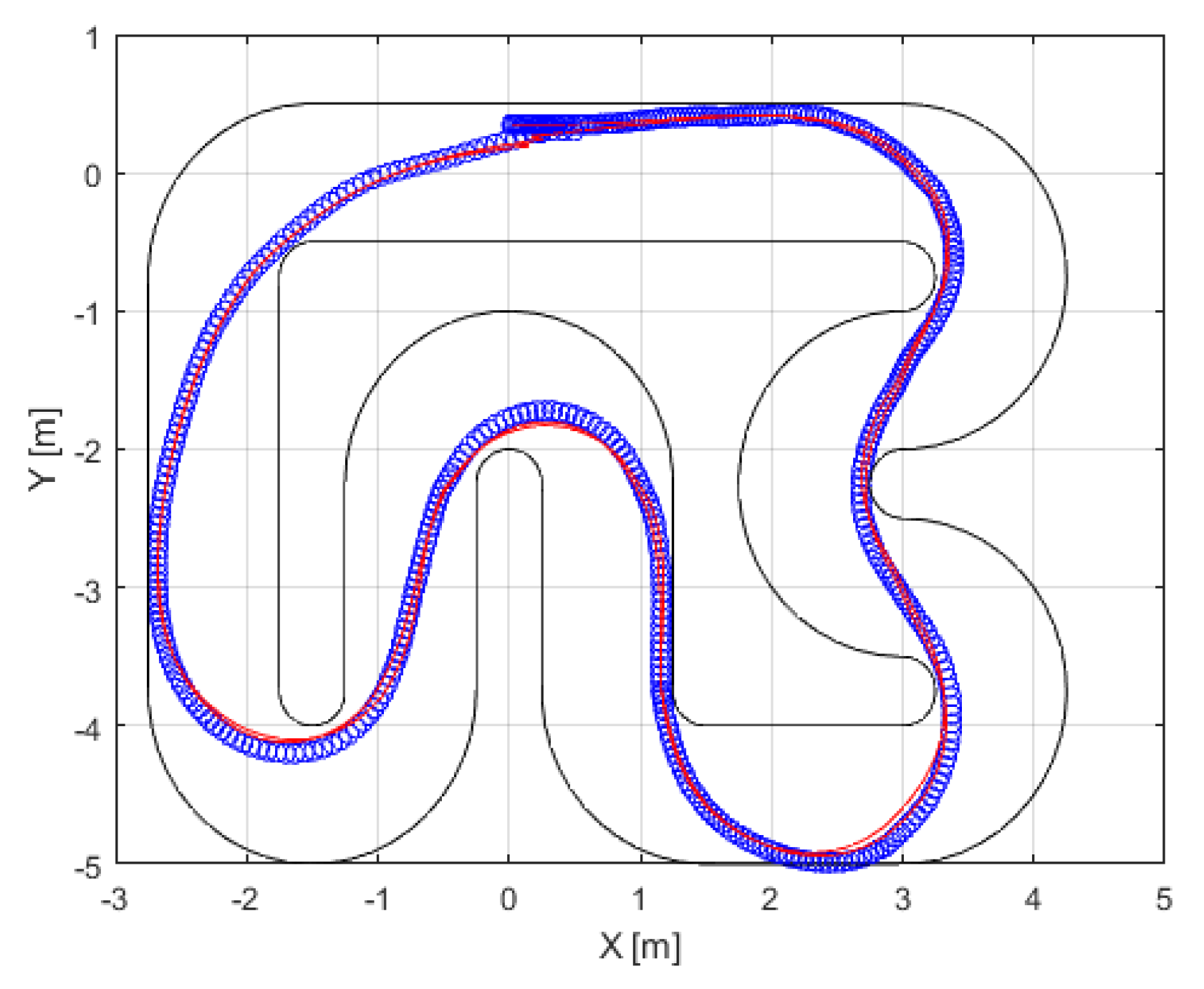
3.4. Validate the Learned Controller through Simulation
3.5. TS Representation for Control Model
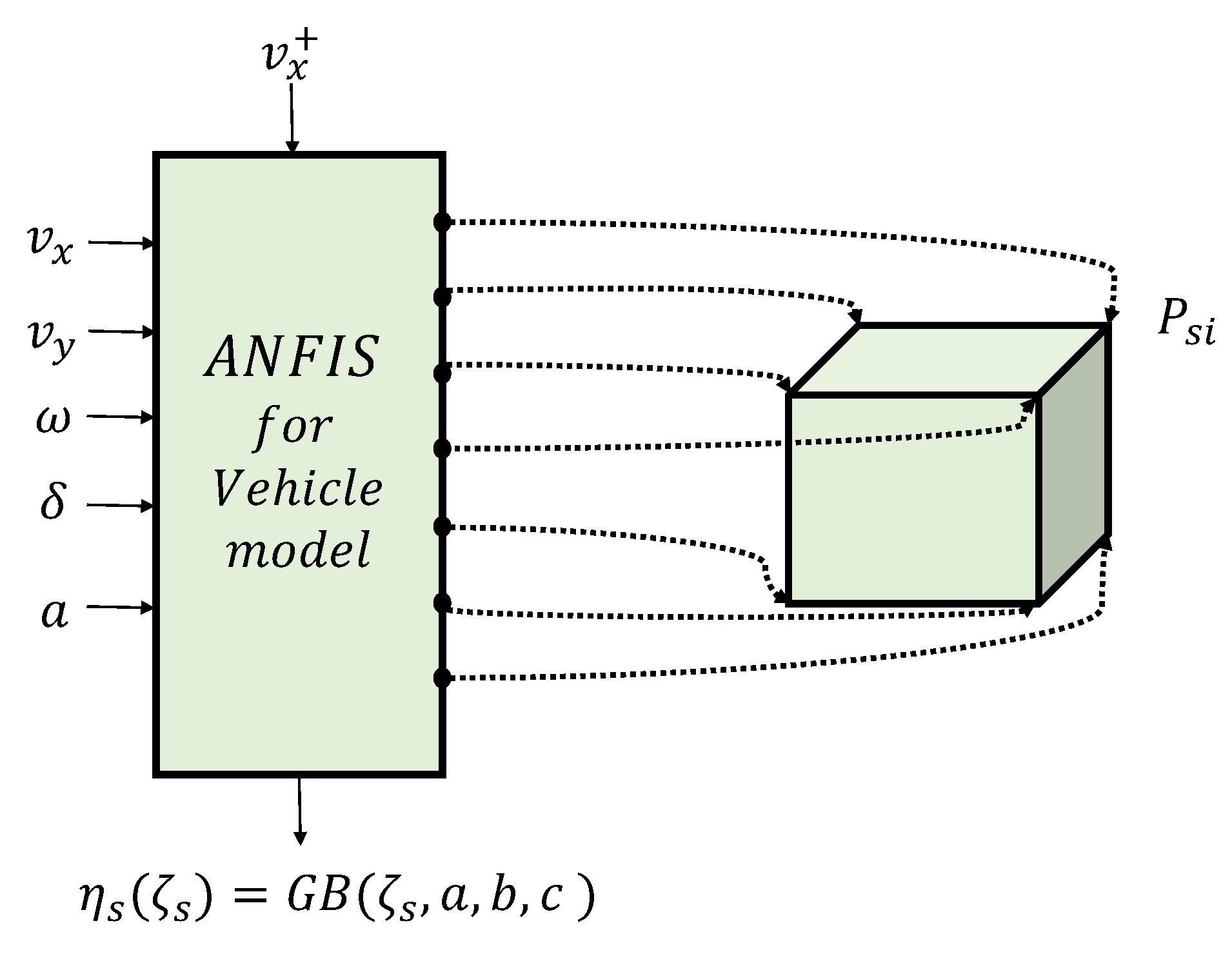
3.6. TS Representation for Vehicle Model

3.7. Stability Assessment Using LMIs
4. Results
4.1. Data Generation
4.2. Learning the Control Law
4.3. Validation of the Learned ANFIS Controller
4.4. Validated Takagi–Sugeno (TS) Representation for Both Control and Vehicle Models
4.5. Stability Assessment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Van Woensel, L.; Archer, G.; Panades-Estruch, L.; Vrscaj, D. Ten Technologies Which Could Change Our Lives: Potential Impacts and Policy Implications; European Union Journal: Brussels, Belgium, 2015. [Google Scholar]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Ritchie, H.; Roser, M. Urbanization. In Our World in Data; Global Change Data Lab: England and Wales, UK, 2018. [Google Scholar]
- Montgomery, W.D.; Mudge, R.; Groshen, E.L.; Helper, S.; MacDuffie, J.P.; Carson, C. America’s Workforce and the Self-Driving Future: Realizing Productivity Gains and Spurring Economic Growth, Washington, United States. 2018. Available online: https://trid.trb.org/View/1516782 (accessed on 22 February 2024).
- Warrendale, P. Levels of Automation for On-Road Vehicles; Society of Automotive Engineers (SAE): Warrendale, PA, USA, 2014. [Google Scholar]
- Bachute, M.R.; Subhedar, J.M. Autonomous driving architectures: Insights of machine learning and deep learning algorithms. Mach. Learn. Appl. 2021, 6, 100164. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, R.; Tang, B.; Guo, H. A Fuzzy-PID scheme for low speed control of a vehicle while going on a downhill road. Energies 2020, 13, 2795. [Google Scholar] [CrossRef]
- Chen, S.; Chen, H. MPC-based path tracking with PID speed control for autonomous vehicles. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; Volume 892, p. 012034. [Google Scholar]
- Peicheng, S.; Li, L.; Ni, X.; Yang, A. Intelligent vehicle path tracking control based on improved MPC and hybrid PID. IEEE Access 2022, 10, 94133–94144. [Google Scholar] [CrossRef]
- Yang, K.; Tang, X.; Qin, Y.; Huang, Y.; Wang, H.; Pu, H. Comparative study of trajectory tracking control for automated vehicles via model predictive control and robust H-infinity state feedback control. Chin. J. Mech. Eng. 2021, 34, 74. [Google Scholar] [CrossRef]
- Awad, N.; Lasheen, A.; Elnaggar, M.; Kamel, A. Model predictive control with fuzzy logic switching for path tracking of autonomous vehicles. ISA Trans. 2022, 129, 193–205. [Google Scholar] [CrossRef] [PubMed]
- Arifin, B.; Suprapto, B.Y.; Prasetyowati, S.A.D.; Nawawi, Z. Steering control in electric power steering autonomous vehicle using type-2 fuzzy logic control and PI control. World Electr. Veh. J. 2022, 13, 53. [Google Scholar] [CrossRef]
- Sabiha, A.D.; Kamel, M.A.; Said, E.; Hussein, W.M. ROS-based trajectory tracking control for autonomous tracked vehicle using optimized backstepping and sliding mode control. Robot. Auton. Syst. 2022, 152, 104058. [Google Scholar] [CrossRef]
- Alcalá, E.; Sellart, L.; Puig, V.; Quevedo, J.; Saludes, J.; Vázquez, D.; López, A. Comparison of two non-linear model-based control strategies for autonomous vehicles. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 846–851. [Google Scholar]
- Karafyllis, I.; Theodosis, D.; Papageorgiou, M. Lyapunov-based two-dimensional cruise control of autonomous vehicles on lane-free roads. Automatica 2022, 145, 110517. [Google Scholar] [CrossRef]
- Atoui, H.; Sename, O.; Milanes, V.; Martinez-Molina, J.J. Toward switching/interpolating LPV control: A review. Annu. Rev. Control 2022, 54, 49–67. [Google Scholar] [CrossRef]
- Wang, J.; Ding, B.; Wang, P. Event-triggered output feedback predictive control for Takagi-Sugeno model with bounded disturbance and redundant channels. Int. J. Robust Nonlinear Control 2023, 33, 3045–3063. [Google Scholar] [CrossRef]
- Park, M.; Kang, Y. Experimental verification of a drift controller for autonomous vehicle tracking: A circular trajectory using LQR method. Int. J. Control Autom. Syst. 2021, 19, 404–416. [Google Scholar] [CrossRef]
- Zhang, K.; Sun, Q.; Shi, Y. Trajectory tracking control of autonomous ground vehicles using adaptive learning MPC. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5554–5564. [Google Scholar] [CrossRef] [PubMed]
- Cheng, S.; Li, L.; Chen, X.; Wu, J. Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying. IEEE Trans. Ind. Electron. 2020, 68, 8698–8707. [Google Scholar] [CrossRef]
- Minh, V.T.; Moezzi, R.; Dhoska, K.; Pumwa, J. Model predictive control for autonomous vehicle tracking. Int. J. Innov. Technol. Interdiscip. Sci. 2021, 4, 560–603. [Google Scholar]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A practical trajectory tracking control of autonomous vehicles using linear time-varying MPC method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 709–723. [Google Scholar] [CrossRef]
- Allamaa, J.P.; Listov, P.; Van der Auweraer, H.; Jones, C.; Son, T.D. Real-time nonlinear mpc strategy with full vehicle validation for autonomous driving. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1982–1987. [Google Scholar]
- Pereira, G.C.; Lima, P.F.; Wahlberg, B.; Pettersson, H.; Mårtensson, J. Nonlinear Curvature Modeling for MPC of Autonomous Vehicles. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Bernal, M.; Sala, A.; Lendek, Z.; Guerra, T.M. Analysis and Synthesis of Nonlinear Control Systems; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Trans. Control. Syst. Technol. 2016, 25, 899–910. [Google Scholar] [CrossRef]
- Shamma, J.S. An overview of LPV systems. In Control of Linear Parameter Varying Systems with Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 3–26. [Google Scholar]
- Alcalá, E.; Puig, V.; Quevedo, J.; Sename, O. Fast zonotope-tube-based LPV-MPC for autonomous vehicles. IET Control Theory Appl. 2020, 14, 3676–3685. [Google Scholar] [CrossRef]
- Alcalá, E.; Puig, V.; Quevedo, J.; Rosolia, U. Autonomous racing using linear parameter varying-model predictive control (LPV-MPC). Control Eng. Pract. 2020, 95, 104270. [Google Scholar] [CrossRef]
- Wang, H.O.; Tanaka, K. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Alcala, E.; Puig, V.; Quevedo, J.; Escobet, T.; Comasolivas, R. Autonomous vehicle control using a kinematic Lyapunov-based technique with LQR-LMI tuning. Control Eng. Pract. 2018, 73, 1–12. [Google Scholar] [CrossRef]
- Tran, G.Q.B.; Pham, T.P.; Sename, O.; Gáspár, P. Design of an LMI-based Polytopic LQR Cruise Controller for an Autonomous Vehicle towards Riding Comfort. Period. Polytech. Transp. Eng. 2023, 51, 1–7. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Liu, C.Z.; Wu, X.; Fang, S.N.; Yong, J.W. Robust LMI-Based H-Infinite Controller Integrating AFS and DYC of Autonomous Vehicles With Parametric Uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6901–6910. [Google Scholar] [CrossRef]
- Jang, J.S. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Trans. Syst. Man Cybern. Syst. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Pamucar, D.; Ćirović, G. Vehicle route selection with an adaptive neuro fuzzy inference system in uncertainty conditions. Decis. Mak. Appl. Manag. Eng. 2018, 1, 13–37. [Google Scholar] [CrossRef]
- Avdagic, Z.; Cernica, E.; Omanovic, S. Adaptive neuro-fuzzy inference system based modelling of vehicle guidance. J. Eng. Sci. Technol. 2019, 14, 2116–2131. [Google Scholar]
- Patel, D.; Cohen, K. Obstacle Avoidance and Target Tracking by Two Wheeled Differential Drive Mobile Robot Using ANFIS in Static and Dynamic Environment. In Fuzzy Information Processing 2020: Proceedings of the 2020 Annual Conference of the North American Fuzzy Information Processing Society, NAFIPS 2020, Virtual Event, 20–22 August 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 337–348. [Google Scholar]
- Ravikumar, S.; Kavitha, D. IOT based autonomous car driver scheme based on ANFIS and black widow optimization. J. Ambient. Intell. Humaniz. Comput. 2021, 1–14. [Google Scholar] [CrossRef]
- Xue, H.; Zhang, Z.; Wu, M.; Chen, P. Fuzzy controller for autonomous vehicle based on rough sets. IEEE Access 2019, 7, 147350–147361. [Google Scholar] [CrossRef]
- Pandey, A.; Kumar, S.; Pandey, K.K.; Parhi, D.R. Mobile robot navigation in unknown static environments using ANFIS controller. Perspect. Sci. 2016, 8, 421–423. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 116–132. [Google Scholar] [CrossRef]
- Fantuzzi, C.; Rovatti, R. On the approximation capabilities of the homogeneous Takagi-Sugeno model. In Proceedings of the IEEE 5th International Fuzzy Systems, New Orleans, LA, USA, 11 September 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 2, pp. 1067–1072. [Google Scholar]
- Hu, J.; Li, X.; Xu, Z.; Pan, H. Co-Design of Quantized Dynamic Output Feedback MPC for Takagi-Sugeno Model. IEEE Trans. Ind. Inform. 2022, 19, 8049–8060. [Google Scholar] [CrossRef]
- Ding, B.; Pan, H. Dynamic output feedback-predictive control of a Takagi–Sugeno model with bounded disturbance. IEEE Trans. Fuzzy Syst. 2016, 25, 653–667. [Google Scholar] [CrossRef]
- Alcalá, E.; Bessa, I.; Puig, V.; Sename, O.; Palhares, R. MPC using an on-line TS fuzzy learning approach with application to autonomous driving. Appl. Soft Comput. 2022, 130, 109698. [Google Scholar] [CrossRef]
- Chaubey, S.; Puig, V. Autonomous Vehicle State Estimation and Mapping Using Takagi–Sugeno Modeling Approach. Sensors 2022, 22, 3399. [Google Scholar] [CrossRef] [PubMed]
- Alcala, E.; Sename, O.; Puig, V.; Quevedo, J. TS-MPC for Autonomous Vehicle using a Learning Approach. IFAC-PapersOnLine 2020, 53, 15110–15115. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Samada, S.E.; Puig, V.; Nejjari, F. Battery Health-Aware MPC Planning for Autonomous Racing Vehicles. In Proceedings of the Conference on Latin America Control Congress, Havana, Cuba, 15–17 November 2022; Springer: Berlin/Heidelberg, Germany, 2023; pp. 177–188. [Google Scholar]
- Alcala, E.; Puig, V.; Quevedo, J.; Escobet, T. Gain-scheduling LPV control for autonomous vehicles including friction force estimation and compensation mechanism. IET Control Theory Appl. 2018, 12, 1683–1693. [Google Scholar] [CrossRef]
- Albarella, N.; Lui, D.G.; Petrillo, A.; Santini, S. A Hybrid Deep Reinforcement Learning and Optimal Control Architecture for Autonomous Highway Driving. Energies 2023, 16, 3490. [Google Scholar] [CrossRef]














| Name | Type |
|---|---|
| Generate FIS type | Sugeno |
| The initial FIS model | Grid partition |
| Decision method for fuzzy logic operation AND (minimum) | Product |
| Decision method for fuzzy logic operation OR (maximum) | Probabilistic |
| Output defuzzification method | Weighted average |
| Number of membership functions for | 2 |
| Number of membership functions for | 2 |
| Number of membership functions for | 2 |
| Input membership function type | Gaussian Bell |
| Output membership function type | Constant |
| Number of rules | 8 |
| Train FIS optimization method | Hybrid |
| Number of epochs | 100 |
| 0.2144 | 0.0280 | 0.0417 | |
| 0.0587 | 0.0323 | 0.0518 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheikhsamad, M.; Puig, V. Learning-Based Control of Autonomous Vehicles Using an Adaptive Neuro-Fuzzy Inference System and the Linear Matrix Inequality Approach. Sensors 2024, 24, 2551. https://doi.org/10.3390/s24082551
Sheikhsamad M, Puig V. Learning-Based Control of Autonomous Vehicles Using an Adaptive Neuro-Fuzzy Inference System and the Linear Matrix Inequality Approach. Sensors. 2024; 24(8):2551. https://doi.org/10.3390/s24082551
Chicago/Turabian StyleSheikhsamad, Mohammad, and Vicenç Puig. 2024. "Learning-Based Control of Autonomous Vehicles Using an Adaptive Neuro-Fuzzy Inference System and the Linear Matrix Inequality Approach" Sensors 24, no. 8: 2551. https://doi.org/10.3390/s24082551
APA StyleSheikhsamad, M., & Puig, V. (2024). Learning-Based Control of Autonomous Vehicles Using an Adaptive Neuro-Fuzzy Inference System and the Linear Matrix Inequality Approach. Sensors, 24(8), 2551. https://doi.org/10.3390/s24082551