
Flexible and Reconfigurable OFDM Implementation in DSP Platform for Various Purposes and Applications


Abstract
:1. Introduction
- A prototype OFDM platform capable of producing and handling a vast number of subcarriers whose number can be limited only by the technical specifications of the utilized ADC and DAC.
- The OFDM platform uses double protection including zero padding (ZP) and cyclic prefix (CP).
- Low-cost production and maintenance of an exhibited DSP system that modifies its functions only with the use of code and can consequently be upgraded easily for every scenario.
- The speed of adaptation (for example, adjusting the produced OFDM subcarriers and even the whole system) can take up to several seconds in the worst-case scenario. In this operational frame where speed is vital, the overall system delay was found equal to 1 ms using a new technique (to the author’s knowledge) based on sending and receiving predetermined pulses.
- The integration of a whole OFDM transmitter–receiver system in the same DSP, thus measured on the LEDs’ pins, as the DAC (output) and ADC (input) were already in use by the transmitter–receiver system. It constitutes a type of emulation showing the method of measuring without the use of an ADC and DAC.
- Also, to the best of the author’s knowledge, this is the first time that the presentation of such a prototype (on a DSP) includes a viable warfare scenario based on the proposed concepts of implementation.
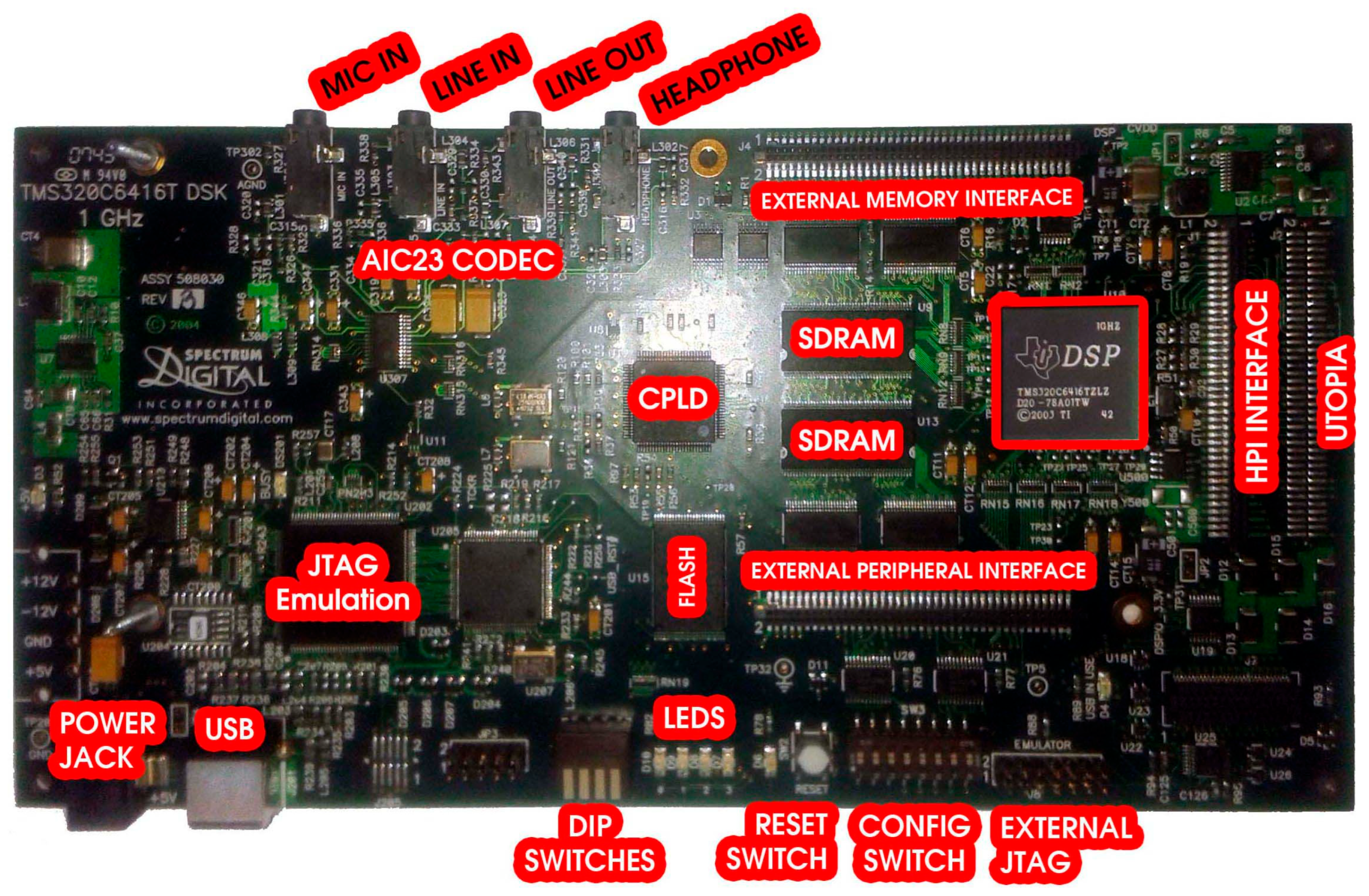
2. General DSP Information—TMS320C6416Τ DSP Starter Kit (DSK)
- DSK size: 210 × 115 mm;
- Digital processor with operating frequencies up to 1 GHz;
- 1 MB internal RAM and thus 512 KByte Flash with an 8-bit interface;
- 16 MB SDRAM with a 64-bit interface; 4 programmable LEDS and four DIP switches;
- Expansion socket for plug-in modules;
- Onboard IEEE JTAG interface and built-in JTAG support over USB;
- Four 3.5 mm audio sockets are intended for a microphone, line input, output (line in, line out), and speaker;
- TLV320AIC23 16-bit stereo encoder circuit (analog interface circuit—AIC—codec) for analog input and output. The AIC uses sigma-delta technology which provides the ADC and DAC functions. This technology uses a 12 MHz system clock and a sampling rate with a range of 8–96 KHz;
- Typical output frequencies from 0 to 96 KHz (depending on the type of ADC);
- Collaboration with Code Composer Studio (CCS), which is an integrated development environment (IDE) for digital signal processing applications and supports real-time debugging. It also has graphical capabilities. Furthermore, software code (could be a telecommunication system) written in C or Assembly language, or partially developed from graphical programming (e.g., Simulink), can be integrated into the DSK;
- Single +5 V supply and onboard voltage regulators of 1.26 V for the DSP and 3.3 V for the memory and its peripherals.
3. DSP Implementation
- Ensure that all cables to the power supply and to and from ADCs and DACs are attached properly while the USB cable connects the DSK board to the personal computer (PC).
- After launching MATLAB/Simulink and confirming the code correctness, TI 6000 Target (C6000 library) should be selected and inserted inside the Simulink model. Then, the target type (code generation) should be the working one of C6416DSK. For example, if the DAC is needed, the corresponding block (C6416DSK DAC) should be in the model.
- The proper arrangements should be conducted in the debug and solver categories. Afterward, the “incremental build” should be executed from the corresponding option. A sequence of code generation is that, firstly, the code is compiled in MATLAB, then CCS is initialized and in turn the assembly code will be compiled and downloaded to the target DSP. At the same time, the advancement toward DSP implementation appears in the code progression screen.
- In general, the whole procedure can take several seconds in the presence of a graphical user interface (GUI). It helps the user by making the procedure of altering some model values inside the GUI and applying the building procedure quicker, so the productivity increases as the utilized times decrease.
3.1. Incorporating Schematics into the DSP for Checking Proper Operation
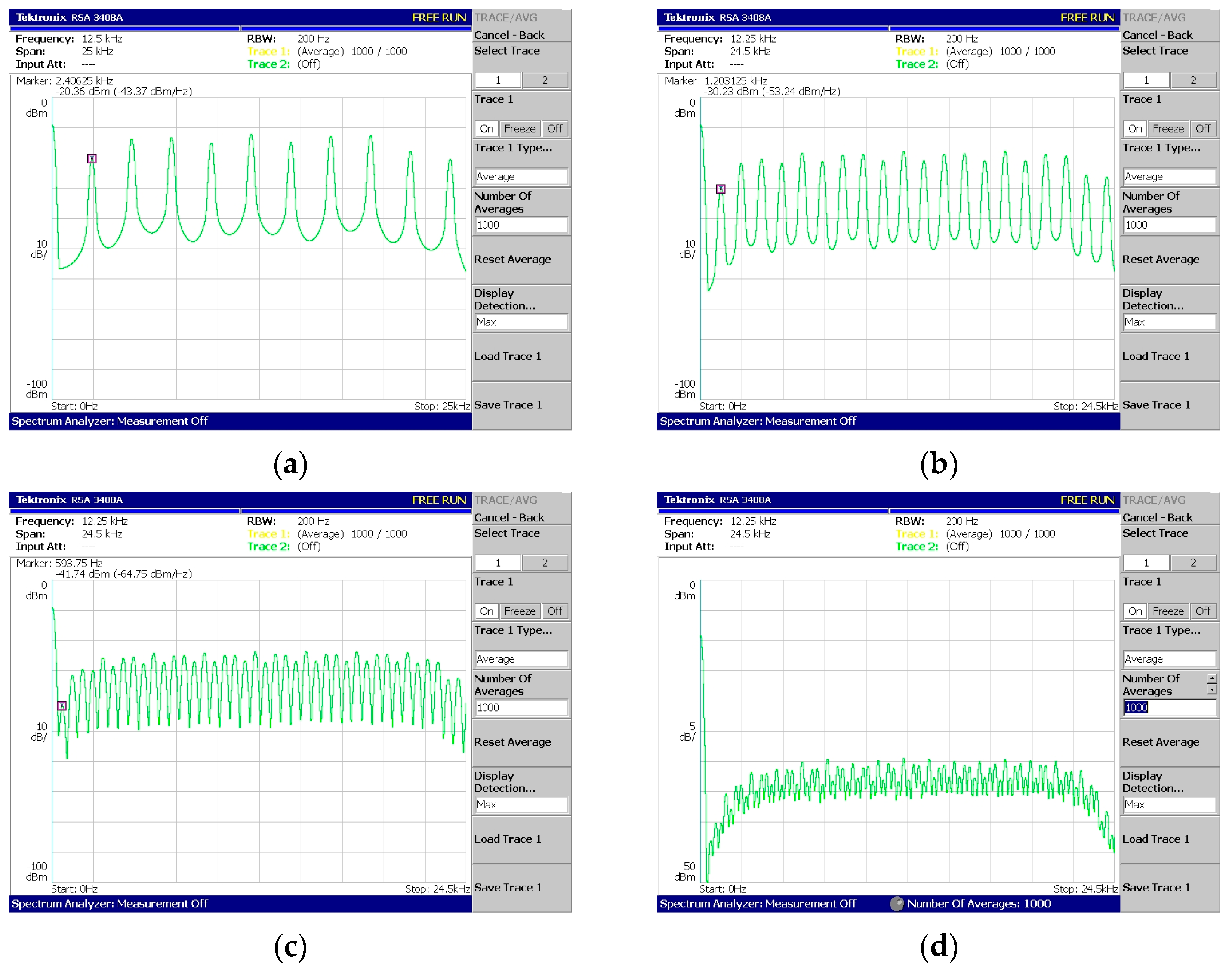
3.2. Implementation of the OFDM System in the DSP
- System V1: Random binary generator with modulator and IFFT;
- System V2: Random binary generator with modulator, IFFT, and cyclic prefix;
- System V3: Random binary generator with convolutional coding, modulator, and IFFT;
- System V4: Random binary generator with convolutional coding, modulator, IFFT, and cyclic prefix (CP);
- System V5: Random binary generator with convolutional coding, modulator, addition of double zeros of at the beginning and end of the signal (double ZP), IFFT, and CP.
4. Proposal of Potential System Integrations inside Modern Warfare Environment
- The initial check of the system should contain simple procedures to ensure the proper operation based on Section 3.1 relevant to the implementation of simple schematics/code on the targeted platform.
- A flexible system (e.g., UAV) could quickly change the utilized frequencies (e.g., GUI in Figure 16) automatically while it would be more immune to channel variations, attenuation, and signal interception attempts.
- The quick alteration of the produced spectrum utilizing only some of the encrypted orthogonal carriers for safety reasons (to not be intercepted) and for spectrum economy based on an artificial intelligence (AI) entity could furthermore enhance the overall performance.
- On the other hand, radars incorporating the smart strategy of using AI techniques while having the capability of working on a vast spectrum and orthogonal carriers [18] could better contribute to seamless detection.
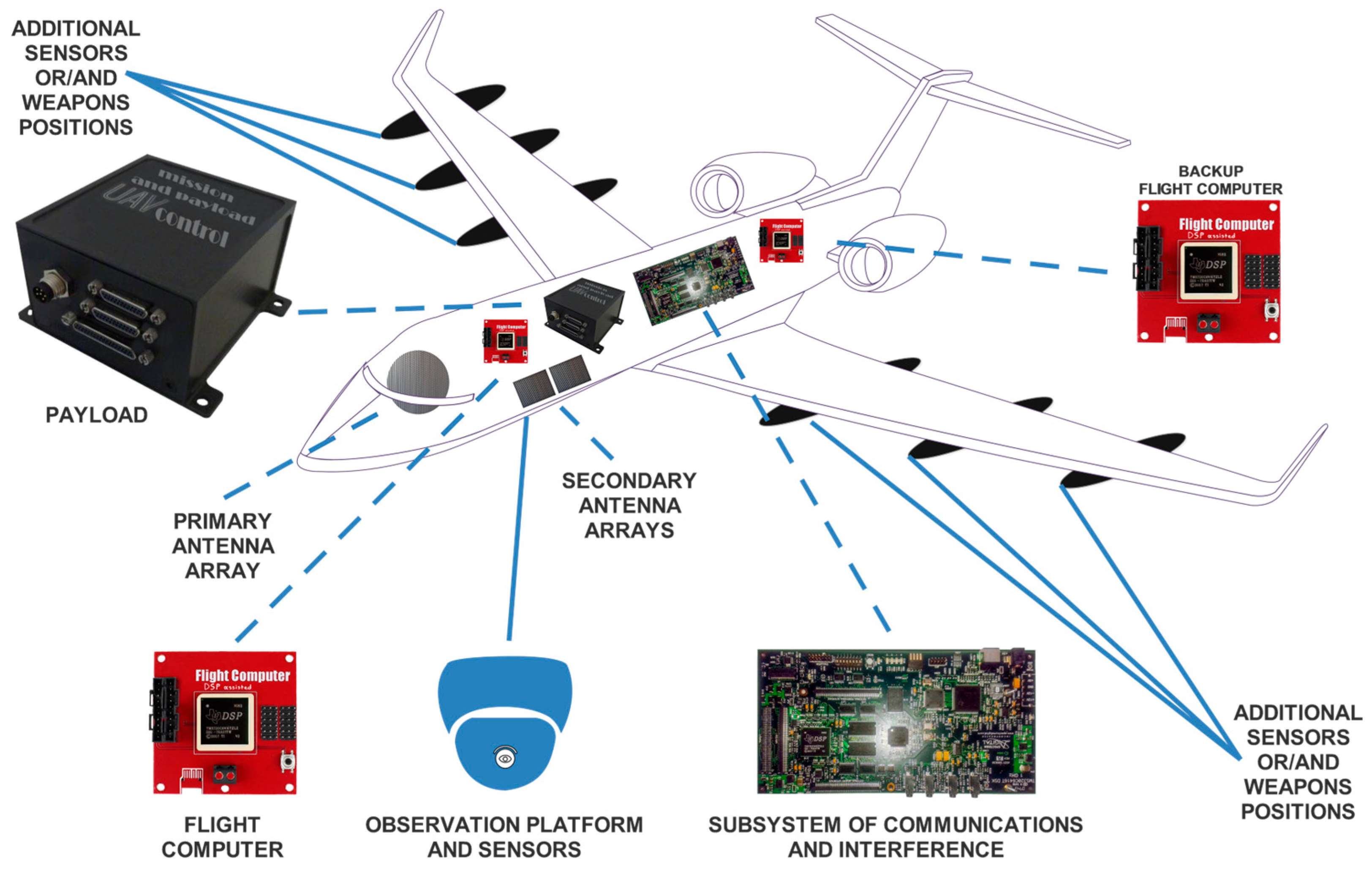
- The airframe of the UAV should consist of composite materials [20], thus being lightweight and contributing to low observability with a modular frame if possible and giving the capability of conducting various missions that require low or high overall load.
- The payload with its controller (which can be a DSP) includes all the needed sensors for every mission while sustaining a modular strategy. Some ordinary detectors are high-analysis cameras, thermal, pressure, and humidity sensors, etc. All the obtained information can lead to a fusion for better processing of the most meaningful data and transmitting them back to the base/remote station.
- The flight computer is the most crucial part of a UAV as with the help of its corresponding sensors such as GPS, gyros, accelerometers, etc. the system flies within the framework of approved instructions (originated by the base or a remote station). As this signal processing unit is vital, a similar one named “backup flight computer” can be implemented in a different part of the airframe for safety reasons. In this way, if the primary flight computer fails or is hit by an enemy unit, then the backup system will provide at least adequate instructions to the system for bringing it back to its base or making it a killer drone.
- The communications subsystem can include, except the antenna arrays, an advanced DSP platform that can sustain satcomm and microwave links. Implementing the OFDM technique could compensate for signal attenuations and complete loss of radio channels due to a noisy environment. For example, considering an OFDM telecommunication system utilizing more than 1024 subcarriers, it is clear that if some are lost even from intended interference, the remaining ones will still sustain high-quality communications for transmitting real-time high-analysis video. Furthermore, having more than one DSP with the appropriate antennas, intended interference could be produced in various frequency bands depending on the transmitting–receiving band limits. Nevertheless, these limits can be altered as these kinds of systems (DSP platforms) are modular with enhanced upconverters for offering seamless performance.
- Antenna arrays [21] can also follow a modular strategy for being changed if their technology is surpassed. Accordingly, secondary integrated antenna arrays can offer better performance and give the capability not only to act supplementarily but to instantly perform another task (e.g., transmitting electromagnetic interference—EMI) against enemy-targeted systems.
- Finally, there should always be provision for additional sensors or weapon slots. Moreover, these are accounted for in the payload summary. Specifically, new kinds of sensors could be mounted under the wings for specific missions with the required missiles or attack systems. Furthermore, relevant to weaponry, the system should have the capability of being updated wirelessly. Imagine having advanced DSPs inside the missiles’ electronic platforms that are updated shortly with the proper algorithm for raising the efficiency of the relevant weapon or sensor [22].
5. Comparative Study
6. Restrictions
- The OFDM system output spectrum is limited due to DAC restrictions that could exhibit output frequencies up to 96 KHz. This frequency range is low but the main idea was to exhibit the technique of easily implementing such a system in a well-known DSP.
- Concerning the goal of implementing these kinds of DSP platforms (e.g., TMS320C6416Τ) in a high-frequency system, it is possible on the condition of adding other components. For example, if there is a demand for the signal to reach nearly 900 MHz [32], then there is a necessity to add a new module on the DSK board that would be an additional DAC or even an field programmable gate array (FPGA) capable of producing higher output frequencies. It could output signals to a low intermediate frequency (IF) (e.g., 10–20 MHz) to produce a well-generated signal (minimal distortions) and then drive it to an ultra-high-frequency (UHF) front-end. The latter could be a mix of filters and local oscillators providing a final signal upconversion within the targeted frequency range [32]. Compatible technology applies to the receiver’s part for reverting the signal to its original frequency (ADC input in the receiver’s DSP system).
- Similar to the previous need for working in higher frequencies, and being aware of new emerging applications demanding even higher frequencies, a solution could be based on microwave design, e.g., modular tactics such as upconverting the signal beginning from the DSP generator to the frequency limit where distortion is minimal and then following this procedure until the generated frequency reaches the desired value.
- Regarding various techniques involving either channel equalization or estimation, these will probably be implemented as soon as the system is ready based on the aforementioned techniques for wireless operation. Also, a new system version will be examined only with advanced turbo coding as the utilization of forward-error correction (FEC) exhibits adequate results by itself [11].
- The warfare scenario is purely qualitative as it simply introduces the potential applications of such an OFDM platform to modern tactics with the presentation of a potential UAV system working with the proposed technology.
- Potential add-ons of this work could be the implementation of such an OFDM platform to a more sophisticated system using AI [33] that could sustain centimeter or millimeter technologies working on a big-data basis.
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gaydecki, P. Algorithms, Applications and Systems for Digital Signal Processing. Available online: http://resource.npl.co.uk/docs/science_technology/scientific_computing/ssfm/documents/20051130_p_gaydeki.pdf (accessed on 29 February 2024).
- Chassaing, R. DSP Applications Using C and the TMS320C6x DSK; Wiley-Interscience: New York, NY, USA, 2008; ISBN 9780470303054. [Google Scholar]
- Chassaing, R.; Reay, D. Digital Signal Processing and Applications with the Tms320c6713 and Tms320c6416 Dsk; John Wiley & Sons: Hoboken, NJ, USA, 2008; ISBN 9786611317645. [Google Scholar]
- Stewart, R.W.; Hoffman, M.W. Digital Signal Processing an “A” to “Z”; BlueBox Multimedia, R.W. Stewart: Glasgow, UK, 1998. [Google Scholar]
- Spectrum Digital TMS320C6416T DSK Technical Reference. Available online: https://www.manualslib.com/manual/2981857/Spectrum-Digital-Tms320c6416t-Dsk.html (accessed on 29 February 2024).
- Texas Instruments TMS320C6414T, TMS320C6415T, TMS320C6416T Fixed-Point Digital Signal Processors, Datasheet, SPRS226M. 2003. Available online: https://www.ti.com/lit/gpn/tms320c6415t (accessed on 29 February 2024).
- TMS320C6416T. Available online: https://www.ti.com/product/TMS320C6416T (accessed on 29 February 2024).
- Texas Instruments C6000 Integration Workshop, Revision 3.1a. Available online: https://e2e.ti.com/cfs-file/__key/communityserver-discussions-components-files/791/iw6000_5F00_workshop.pdf (accessed on 29 February 2024).
- Boateng, K.; Badu, C. EE452 Senior Capstone Project: Integration of Matlab Tools for DSP Code Generation; Bradley University: Peoria, IL, USA, 2006. [Google Scholar]
- Liu, J.; Bergenudd, E.; Patmanathan, V.; Masson, R. OFDM Project Final Report 2E1367-Project Course in Signal Processing and Digital Communication; Technical Report; KTH: Stockholm, Sweden, 2005. [Google Scholar]
- Chronopoulos, S.K.; Christofilakis, V.; Tatsis, G.; Kostarakis, P. Performance of Turbo Coded OFDM under the Presence of Various Noise Types. Wirel. Pers. Commun. 2016, 87, 1319–1336. [Google Scholar] [CrossRef]
- Prot, S.; Palmkvist, K. TSTE91 System Design Communications System Simulation Using Simulink Part V OFDM by IFFT Modulation, Electronic Systems; Dept. EE, LiTH: Linkoping, Sweden, 2003. [Google Scholar]
- Mask Editor Overview-MATLAB & Simulink. Available online: https://www.mathworks.com/help/simulink/gui/mask-editor-overview.html (accessed on 21 March 2024).
- Chronopoulos, S.K.; Tatsis, G.; Raptis, V.; Kostarakis, P. Enhanced PAPR in OFDM without Deteriorating BER Performance. Int. J. Commun. Netw. Syst. Sci. 2011, 4, 164–169. [Google Scholar] [CrossRef]
- Chronopoulos, S.K.; Christofilakis, V.; Tatsis, G.; Kostarakis, P. Reducing Peak-to-Average Power Ratio of a Turbo Coded OFDM. Wirel. Eng. Technol. 2012, 3, 195–202. [Google Scholar] [CrossRef]
- Pasternak, G.; Zaczek-Peplinska, J.; Pasternak, K.; Jóźwiak, J.; Pasik, M.; Koda, E.; Vaverková, M.D. Surface Monitoring of an MSW Landfill Based on Linear and Angular Measurements, TLS, and LIDAR UAV. Sensors 2023, 23, 1847. [Google Scholar] [CrossRef] [PubMed]
- Qian, B.; Al Said, N.; Dong, B. New Technologies for UAV Navigation with Real-Time Pattern Recognition. Ain Shams Eng. J. 2023, 15, 102480. [Google Scholar] [CrossRef]
- Li, S.; Wang, F.; Zhang, Y.; Li, R.; Shi, S.; Li, Y. OFDM-MIMO Radar Assisted Dual-Function Radar Communication System Using Index Modulation. Digit. Signal Process. 2024, 145, 104302. [Google Scholar] [CrossRef]
- Pastor, E.; Lopez, J.; Royo, P. A Hardware/Software Architecture for UAV Payload and Mission Control. In Proceedings of the 2006 IEEE/AIAA 25TH Digital Avionics Systems Conference, Portland, OR, USA, 15–18 October 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar]
- Kurnyta, A.; Zielinski, W.; Reymer, P.; Dragan, K.; Dziendzikowski, M. Numerical and Experimental UAV Structure Investigation by Pre-Flight Load Test. Sensors 2020, 20, 3014. [Google Scholar] [CrossRef] [PubMed]
- Hehenberger, S.P.; Elmarissi, W.; Caizzone, S. Design and Installed Performance Analysis of a Miniaturized All-GNSS Bands Antenna Array for Robust Navigation on UAV Platforms. Sensors 2022, 22, 9645. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Huang, C.; Zhang, Z.; Wang, X.; Han, B.; Wei, Z.; Li, Y.; Wang, L.; Zhu, W. The Trajectory Generation of UCAV Evading Missiles Based on Neural Networks. J. Phys. Conf. Ser. 2020, 1486, 022025. [Google Scholar] [CrossRef]
- Mubarak, S.M. Implementation of COFDM Reed Solomon Using TMS320C6713. Al-Salam J. Eng. Sci. Technol. 2022, 1, 26–33. [Google Scholar] [CrossRef]
- Sattya Kiran, S.V.; Rao, S.P.V. Implementation of SISO-OFDM Transmission Using MATLAB on DSP Processor. Int. J. Sci. Eng. Technol. Res. 2016, 5, 676–682. [Google Scholar]
- Varsha, P.E.; Jagadeesh Chandra, A.P. Real Time Implementation of OFDM System on TMS320C6713. Int. J. Comput. Appl. (0975–8887). Available online: https://www.ijcaonline.org/proceedings/ncesco2015/number3/22309-5325/ (accessed on 21 March 2024).
- Fukuda, R.M.; Abrão, T. OFDM System Implementation in DSP Platform TMS320C6678. J. Comput. Commun. 2016, 4, 26–36. [Google Scholar] [CrossRef]
- Sudheesh, P.G.; Manda, C.; Muthuchidambaranathan, P. On Frequency Domain Channel Estimation Using WARP v3 Hardware Platform. In Proceedings of the 2017 11th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 5–6 January 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Luo, C.; Ma, B.; Chen, F.; Guan, Q.; Yu, H.; Ji, F. Multicore-Processor Based Software-Defined Communication/Network Platform for Underwater Internet of Things. Sensors 2019, 19, 5168. [Google Scholar] [CrossRef]
- Vucha, M.; Sara Varghese, L. Design Space Exploration of DSP Techniques for Hardware Software Co-Design: An OFDM Transmitter Case Study. Int. J. Comput. Appl. 2015, 116, 29–33. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Z.; Su, Y. Design of a General Hardware in the Loop Underwater Communication Emulation System. IEEE Access 2021, 9, 37685–37696. [Google Scholar] [CrossRef]
- Chen, P.; Rong, Y.; Nordholm, S.; He, Z. An Underwater Acoustic OFDM System Based on NI CompactDAQ and LabVIEW. IEEE Syst. J. 2019, 13, 3858–3868. [Google Scholar] [CrossRef]
- Langwieser, R.; Lasser, G.; Angerer, C.; Rupp, M.; Scholtz, A. A Modular UHF Reader Frontend for a Flexible RFID Testbed. In Proceedings of the Second International EURASIP Workshop on RFID Technology, Budapest, Hungary, 7–8 July 2008; p. 12. [Google Scholar]
- Asif, H.M.; Affan, A.; Tarhuni, N.; Raahemifar, K. Deep Learning-Based next-Generation Waveform for Multiuser VLC Systems. Sensors 2022, 22, 2771. [Google Scholar] [CrossRef] [PubMed]
- Vachtsevanos, G.; Georgoulas, G.; Nikolakopoulos, G. Fault Diagnosis, Failure Prognosis and Fault Tolerant Control of Aerospace/Unmanned Aerial Systems. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 366–371. [Google Scholar]
- Cuc, A.-M.; Morgoș, F.L.; Grava, A.-M.; Grava, C. Iterative Equalization and Decoding over an Additive White Gaussian Noise Channel with ISI Using Low-Density Parity-Check Codes. Appl. Sci. 2023, 13, 12294. [Google Scholar] [CrossRef]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Experimental Setup | Real-Time Frequency Meas. | Real-Time Time-Domain Meas. | ZP and CP Meas. | System Delay Meas. or Other Delays | GUI | Highlights/ Warfare Scenario |
|---|---|---|---|---|---|---|---|
| [23] | Loaded code in TMS320C6713 | No (simulated) | No | No | No | No | RS coding in TMS320C6713 /No warfare |
| [24] | Loaded code in TMS320C6713 | No (simulated) | No | No | No | No | Verifying SISO-OFDM code in DSP /No warfare |
| [25] | ANSI C code generation intended for TMS320C6713 | No (simulated) | No (simulated) | No | No | No | Easy OFDM design /No warfare |
| [26] | Implemented code in TMS320C6678 | No | No | No | No | No | Recovered image after fading channel emulation /No warfare |
| [27] | Implemented code in WARP test-bed | Yes | No | No | No | No | Wireless pilots using two dual band antennas /No warfare |
| [28] | Implemented code in a multicore board | No | Yes | No | No | No | Reconfigurable platform for underwater IoT /No warfare |
| [29] | Implemented code in TMS320C6713 and Xilinx FPGA-Virtex5 | No | No | No | Yes | No | Estimating computation times /No warfare |
| [30] | Utilization of acquisition card | Yes (emulated) | Yes (emulated) | No | No | Yes | Designing hardware in the loop underwater comm. emulation /No warfare |
| [31] | Implemented code in TMS320C6713 | Yes (not extsv) | Yes (not extsv) | No | Yes | Yes | Underwater acoustic implementation /No warfare |
| This work | Implemented code in TMS320C6416Τ | Yes (extsv) | Yes (extsv) | Yes (extsv) | Yes | Yes | OFDM scenarios and measurements /Warfare |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chronopoulos, S.K. Flexible and Reconfigurable OFDM Implementation in DSP Platform for Various Purposes and Applications. Sensors 2024, 24, 2732. https://doi.org/10.3390/s24092732
Chronopoulos SK. Flexible and Reconfigurable OFDM Implementation in DSP Platform for Various Purposes and Applications. Sensors. 2024; 24(9):2732. https://doi.org/10.3390/s24092732
Chicago/Turabian StyleChronopoulos, Spyridon K. 2024. "Flexible and Reconfigurable OFDM Implementation in DSP Platform for Various Purposes and Applications" Sensors 24, no. 9: 2732. https://doi.org/10.3390/s24092732
APA StyleChronopoulos, S. K. (2024). Flexible and Reconfigurable OFDM Implementation in DSP Platform for Various Purposes and Applications. Sensors, 24(9), 2732. https://doi.org/10.3390/s24092732