Improving the Response of a Wheel Speed Sensor by Using a RLS Lattice Algorithm

Abstract
:1. Introduction
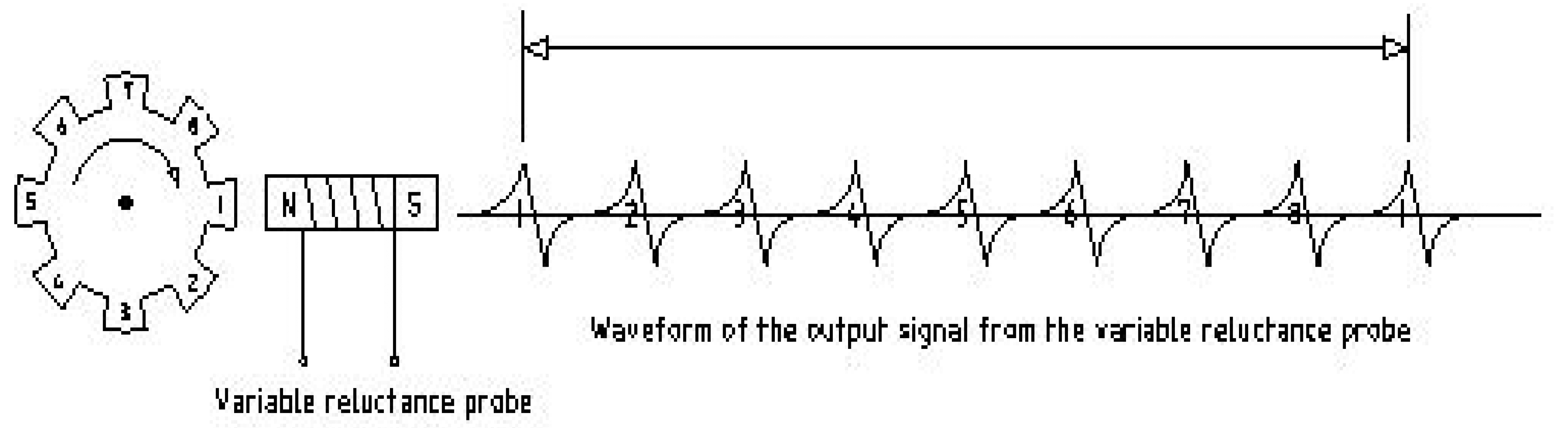
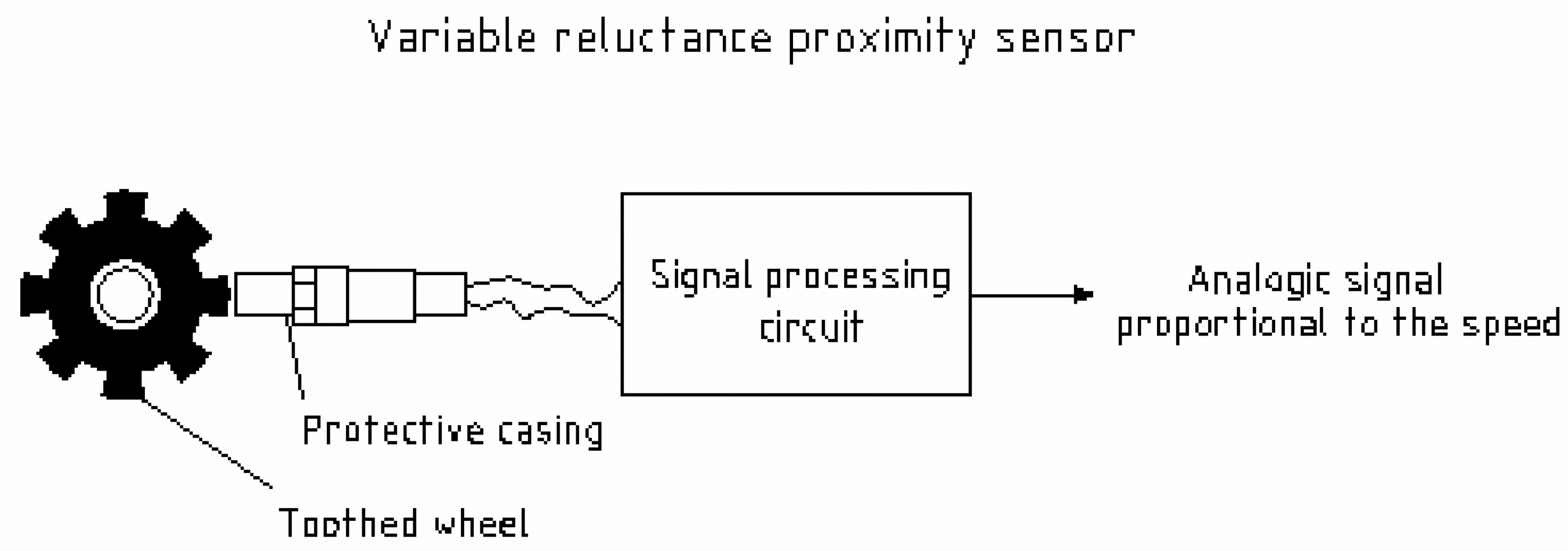
2. The wheel speed sensor
2.1. Principles
2.2. Considerations
3. The most important sources of disturbances and noise that corrupt the relevant signal coming from wheel speed sensors
- Vibrations of the framework,
- Vibrations of car sprung and unsprung masses,
- Vibrations of the chassis,
- Vibrations of both the front axle and the rear axle,
- Vibrations of the engine,
- Vibrations of the wheels,
- Vibrations of the tires,
- Vibrations caused by direct actions.
4. Considerations on adaptive filtering
4.1. Introduction
- Low computational burden,
- Good numerical behavior,
- Robustness,
- Ease of implementation,
- Satisfactory rate of convergence,
- Good round-off error rejection.
4.2. Summary of the RLS lattice algorithm (from Haykin [55] and Hernandez [24])
4.2.1. The RLS lattice algorithm using a priori estimation errors with error feedback
4.2.1.1. Initialization
4.2.1.2. Predictions
4.2.1.3. Filtering
5. Results of the experiment
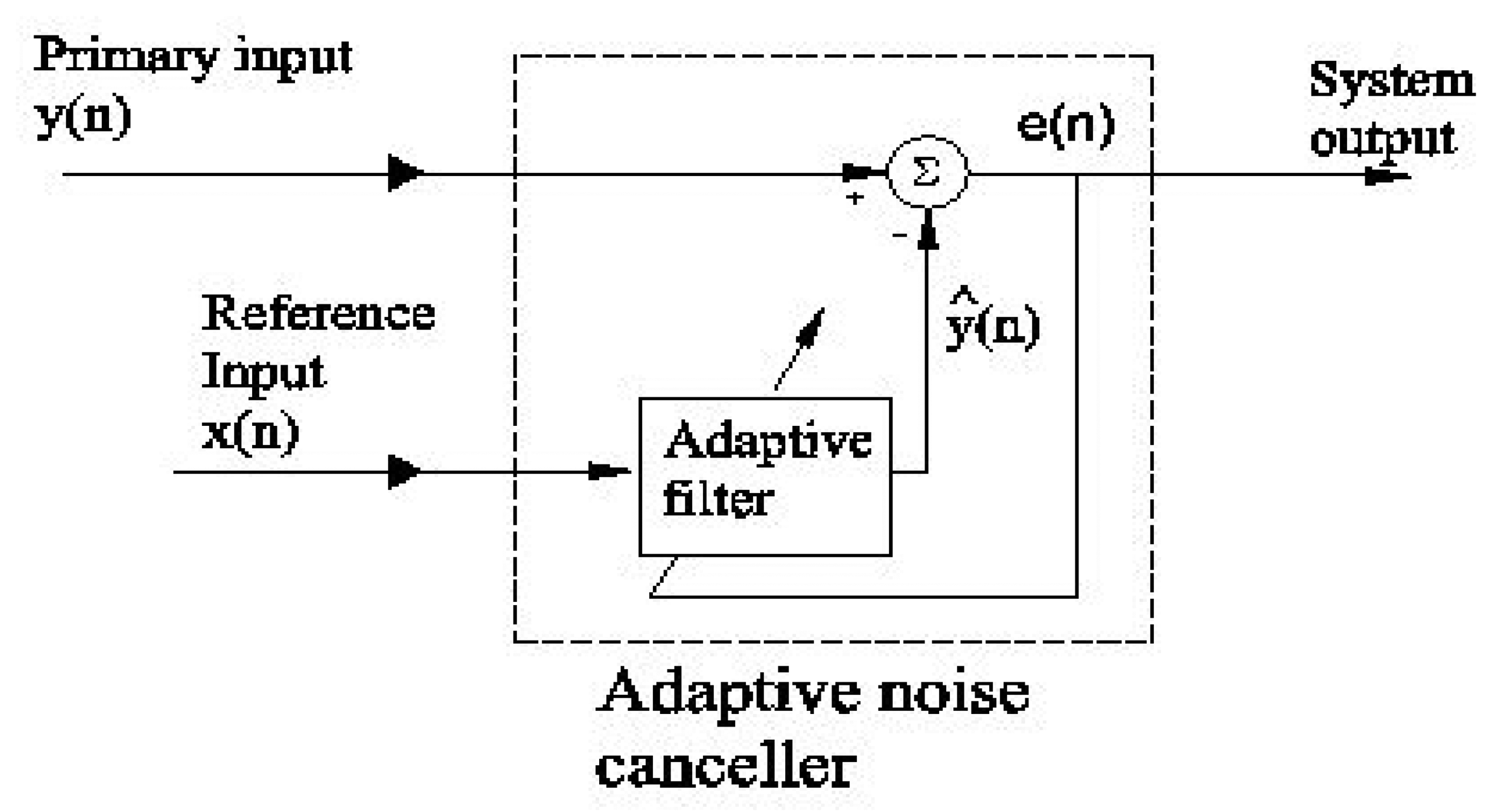
5.1. The adaptive noise canceling system
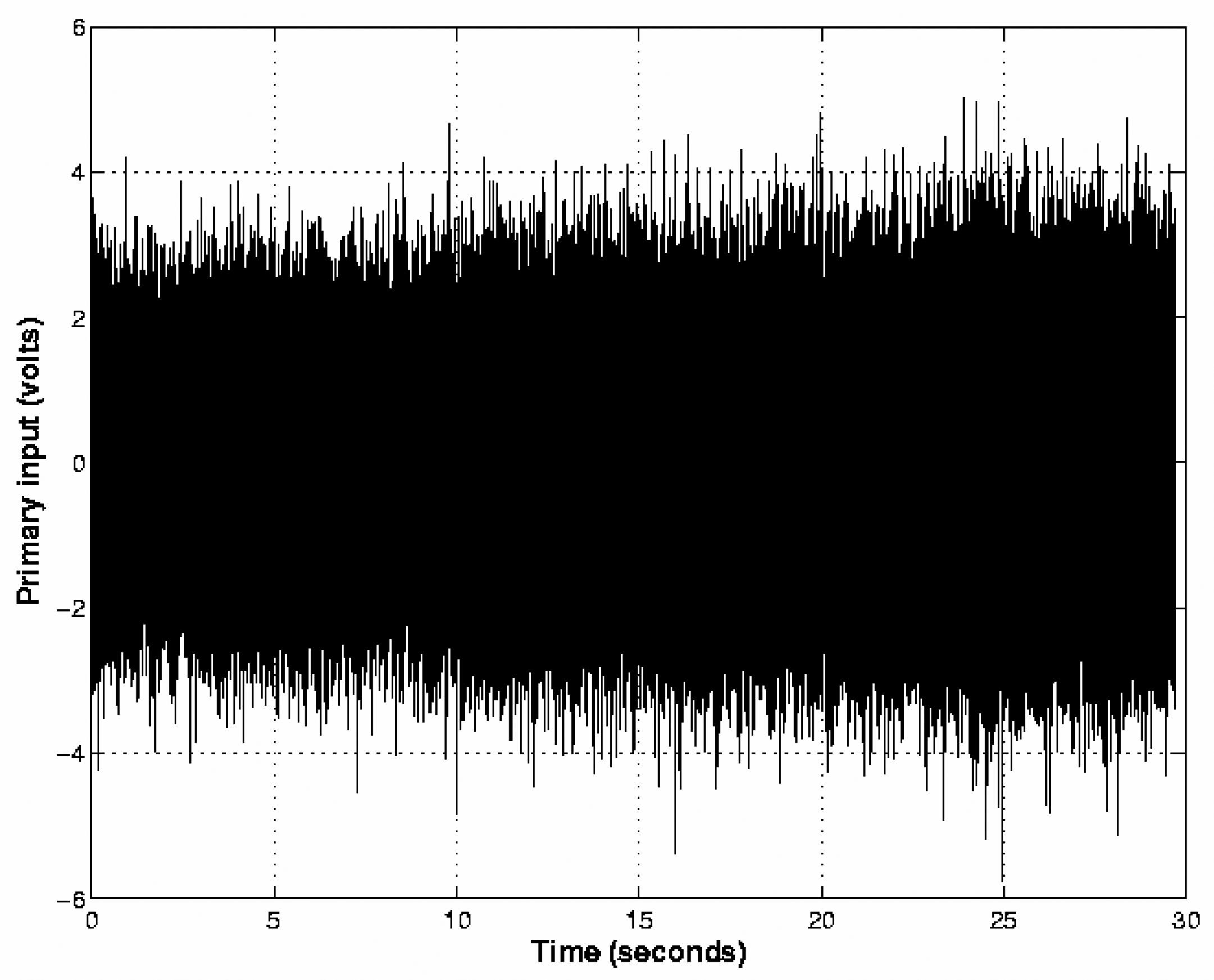
5.2. Comments on the system's inputs
5.3. Filtering
6. Conclusions
Acknowledgments
References
- Microelectromechanical systems advanced materials and fabrication materials; National Academy Press: Washington, D.C., 1997.
- Cooper, A. R.; Brignell, J. E. Electronic processing of transducer signals: Hall effect as an example. Sensors and Actuators A 1985, 7, 189–198. [Google Scholar]
- Ko, W. H.; Fung, C. D. VLSI and intelligent transducers. Sensors and Actuators A 1982, 2, 239–250. [Google Scholar]
- Middelhoek, S.; Hoogerwerf, A. C. Smart sensors: When and where? Sensors and Actuators A 1985, 8, 39–48. [Google Scholar]
- Giachino, J. M. Smart sensors. Sensors and Actuators A 1986, 10, 239–248. [Google Scholar]
- Middelhoek, S.; French, P. J.; Huising, J. H.; Lian, W. J. Sensors with digital or frequency output. Sensors and Actuators A 1988, 15, 119–133. [Google Scholar]
- Holzlein, K.; Larik, J. Silicon magnetic field sensor with frequency output. Sensors and Actuators A 1991, 26, 349–355. [Google Scholar]
- Najafi, K. Smart sensors. Journal of Micromechanics and Microengineering 1991, 1, 86–102. [Google Scholar]
- Juds, S. M. Toward a definition of smart sensors. Sensors 1991, 2–3. [Google Scholar]
- Nihtianov, S.; Minkova, T. Magnetic-field-sensitive device with frequency output. Sensors and Actuators A 1992, 30, 101–104. [Google Scholar]
- Ramsden, E. Measuring magnetic fields with fluxgate sensors. Sensors 1994, 87–90. [Google Scholar]
- Hernandez, W. Fluxgate magnetometer for magnetic fields in the range 1-100uT. Electronics Letters 1995, 31, 2110–2111. [Google Scholar]
- Rodriguez, F.; Trujillo, H.; Hernandez, W. A simple bandgap-type magnetoamplifier. Sensors and Actuators A 1996, 55, 133–137. [Google Scholar]
- Hernandez, W. Magnetic-field sensor based on a relaxation oscillator. Sensors and Actuators A 1996, 55, 163–166. [Google Scholar]
- Jacobsen, E. Signal conditioning a pressure sensor with a Filed-Programmable Analog Array. Sensors 1997, 81–86. [Google Scholar]
- Frank, R. Understanding smart sensors, Second Edition ed; Artech House: Norwood, MA, 2000. [Google Scholar]
- Hernandez, W. Improving the response of an accelerometer by using optimal filtering. Sensors and Actuators A 2001, 88, 198–208. [Google Scholar]
- Hernandez, W. Improving the response of several accelerometers used in a car under performance tests by using Kalman filtering. Sensors 2001, 1, 38–52. [Google Scholar]
- Hernandez, W. Improving the response of a wheel speed sensor using an adaptive line enhancer. Measurement 2003, 33, 229–240. [Google Scholar]
- Hernandez, W. Improving the response of a wheel speed sensor by using frequency-domain adaptive filtering. IEEE Sensors Journal 2003, 3, 404–413. [Google Scholar]
- Mörbe, M.; Zwiener, G. Wheel-speed sensors. In Sensors for Automotive Technology; Marek, J., Trah, H. -P., Suzuki, Y., Yokomori, I., Eds.; WILEY-VCH Verlag GmbH & Co. KgaA: Weinheim, 2003; vol. 4, pp. 403–416. [Google Scholar]
- Hernandez, W. Improving the response of wheel speed sensors by using robust and optimal signal processing techniques. IEEE International Symposium on Industrial Electronics, ISIE2005, Dubrovnik, Croatia, June 20–23, 2005; pp. 1049–1053.
- Hernandez, W. Robust multivariable estimation of the relevant information coming from a wheel speed sensor and an accelerometer embedded in a car under performance tests. Sensors 2005, 5, 488–508. [Google Scholar]
- Hernandez, W. Improving the response of a rollover sensor placed in a car under performance tests by using a RLS lattice algorithm. Sensors 2005, 5, 613–632. [Google Scholar]
- Hernandez, W. Wheel speed sensors. In Encyclopedia of Sensor; Grimes, C. A., Dickey, E. C., Pishko, M. V., Eds.; American Scientific Publishers; in press.
- Gregory, B. A. Introduction to electrical instrumentation and measurement systems, Second Edition ed; The Macmillan Press Limited: England, 1981. [Google Scholar]
- Beckwith, T. G.; Buck, N. L.; Marangoni, R. D. Mechanical measurements, Third Edition ed; Addison-Wesley: Massachusetts, 1981. [Google Scholar]
- Norton, H. N. Sensor and analyzer handbook; Prentice-Hall: Englewood Cliffs, New Jersey, 1982. [Google Scholar]
- Beckwith, T. G.; Marangoni, R. D.; Lienhard, V. J. H. Mechanical measurements, Fifth Edition ed; Addison-Wesley: New York, 1993. [Google Scholar]
- Carr, J. J. Sensors and circuits.; Prentice-Hall, Upper Saddle River: New Jersey, 1993. [Google Scholar]
- Carr, J. J. Elements of electronic instrumentation and measurements, Third Edition ed; Prentice-Hall, Upper Saddle River: New Jersey, 1995. [Google Scholar]
- Johnson, C. D. Process control instrumentation technology, Fifth Edition ed; Prentice-Hall, Upper Saddle River: New Jersey, 1997. [Google Scholar]
- Edgar, P. Sensors for measurement and control; Longman: London, 1998. [Google Scholar]
- Ribbens, W. B. Understanding automotive electronics, Fifth Edition ed; SAE International: Warrendale, PA, 1998. [Google Scholar]
- Webster, J. G. The measurement, instrumentation, and sensors handbook; CRC Press LLC: Boca Raton, Florida, 1999. [Google Scholar]
- Pallás-Areny, R.; Webster, J. G. Sensors and signal conditioning, Second Edition ed; John Wiley & Sons: New York, 2001. [Google Scholar]
- Sinclair, I. Sensors and transducers, Third Edition ed; Newnes, Butterworth-Heinemann: Linacre House, Jordan Hill, Oxford, 2001. [Google Scholar]
- Fleming, W. J. Overview of automotive sensors. IEEE Sensors Journal 2001, 1, 296–308. [Google Scholar]
- Wilson, J. S. Sensor technology handbook; Newnes, Elsevier Inc.: Linacre House, Jordan Hill, Oxford, UK, 2005. [Google Scholar]
- Aparicio, F.; Vera, C.; Díaz, V. Teoría de los vehículos automóviles; Sección de Publicaciones de la ETSII-UPM: Madrid, 1995. [Google Scholar]
- Doob, J. L. Stochastic processes; John Wiley & Sons: New York, 1953. [Google Scholar]
- Dynkin, E. B. Markov processes; Springer-Verlag: New York, 1965. [Google Scholar]
- Papoulis, A.; Pillai, S. U. Probability, random variables, and stochastic processes, Fourth Edition ed; McGraw-Hill: New York, 2001. [Google Scholar]
- Kalman, R. E. A new approach to linear filtering and prediction problems. Trans. ASME, J. Basic Eng. 1960, 82, 35–45. [Google Scholar]
- Kalman, R. E.; Bucy, R. S. New results in linear filtering and prediction theory. Trans. ASME, J. Basic Eng. 1961, 83, 95–107. [Google Scholar]
- Kalman, R. E. New Results in Wiener Filtering Theory. In Proc. Symp. Eng. Appl. Random Functions Theory and Probability; Bobdanoff, J. L., Kozin, F., Eds.; John Wiley & Sons: New York, 1963. [Google Scholar]
- Sorenson, H. W. Least-squares estimation: from Gauss to Kalman. IEEE Spectrum 1970, 7, 63–68. [Google Scholar]
- Kailath, T. A view of three decades of linear filtering theory. IEEE Transactions on Information Theory 1974, 20, 146–181. [Google Scholar]
- Anderson, B. D.; Moore, J. B. Optimal Filtering; Dover Publications: New York, 2005. [Google Scholar]
- Wiener, N. Extrapolation, Interpolation & Smoothing of Stationary Time Series; The M.I.T. Press: Cambridge, Massachusetts, 1949. [Google Scholar]
- Kolmogorov, A. N. Interpolation and Extrapolation. Bull. de l'académie des sciences de U.S.S.R. 1941, Ser. Math.. 5, 3–14. [Google Scholar]
- Goodwin, G. S.; Sin, K. S. Adaptive Filtering Prediction and Control; Prentice-Hall: Englewood Cliffs, New Jersey, 1984. [Google Scholar]
- Widrow, B.; Stearns, S. D. Adaptive Signal Processing; Prentice-Hall: Englewood Cliffs, New Jersey, 1985. [Google Scholar]
- Solo, V.; Kong, X. Adaptive Signal Processing Algorithms; Prentice-Hall: Englewood Cliffs, New Jersey, 1995. [Google Scholar]
- Haykin, S. Adaptive Filter Theory, Fourth Edition ed; Prentice-Hall, Upper Saddle River: New Jersey, 2002. [Google Scholar]
- Manolakis, D. G.; Ingle, V. K.; Kogon, S. M. Statistical and adaptive signal processing; Artech House: Norwood, MA, 2005. [Google Scholar]
- Pan, C. T.; Plemmons, R. J. Least-squares modifications with inverse factorizations: Parallel implications. Journal of Computational and Applied Mathematics 1989, 27, 109–127. [Google Scholar]
- Alexander, S. T. A method for recursive least-squares filtering based upon an inverse QR decomposition. IEEE Transactions on Signal Processing 1993, 41, 20–30. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
© 2006 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Hernandez, W. Improving the Response of a Wheel Speed Sensor by Using a RLS Lattice Algorithm. Sensors 2006, 6, 64-79. https://doi.org/10.3390/s6020064
Hernandez W. Improving the Response of a Wheel Speed Sensor by Using a RLS Lattice Algorithm. Sensors. 2006; 6(2):64-79. https://doi.org/10.3390/s6020064
Chicago/Turabian StyleHernandez, Wilmar. 2006. "Improving the Response of a Wheel Speed Sensor by Using a RLS Lattice Algorithm" Sensors 6, no. 2: 64-79. https://doi.org/10.3390/s6020064
APA StyleHernandez, W. (2006). Improving the Response of a Wheel Speed Sensor by Using a RLS Lattice Algorithm. Sensors, 6(2), 64-79. https://doi.org/10.3390/s6020064