1. Introduction
In advanced industrial plants, primarily in galvanic plants, current sources providing fast and simple changes of the current direction and intensity are often necessary and what is more, with a desired shape in time [
1]. Due to developments in the fields of electronic and computer equipment, a great number of possibilities have opened for obtaining an optional shape of the voltage or the current, accompanied by the complete automation of the process and the introduction of the necessary feedbacks for the sake of eliminating system disturbances.
In this paper we describe the realization of such a system – a bipolar current source with the possibility to set time intervals and current intensities either in one or the other direction. The system is based on a Pentium IV computer as well as the software platform LabVIEW, with the hardware interface, the current regulator and the software applications being the result of our own development.
2. Hardware basis
For the sake of generating signals as well as monitoring the response of the galvanic system, a measurement and control system based of the Pentium IV PC has been developed. The hardware part, besides the computer, includes a commercial ADDA converter, the external interface for an analog signal processing and a powerful current source controlled by the voltage.
For ADDA conversion a commercially available Burr-Brown PCI-20428W converter has been used [
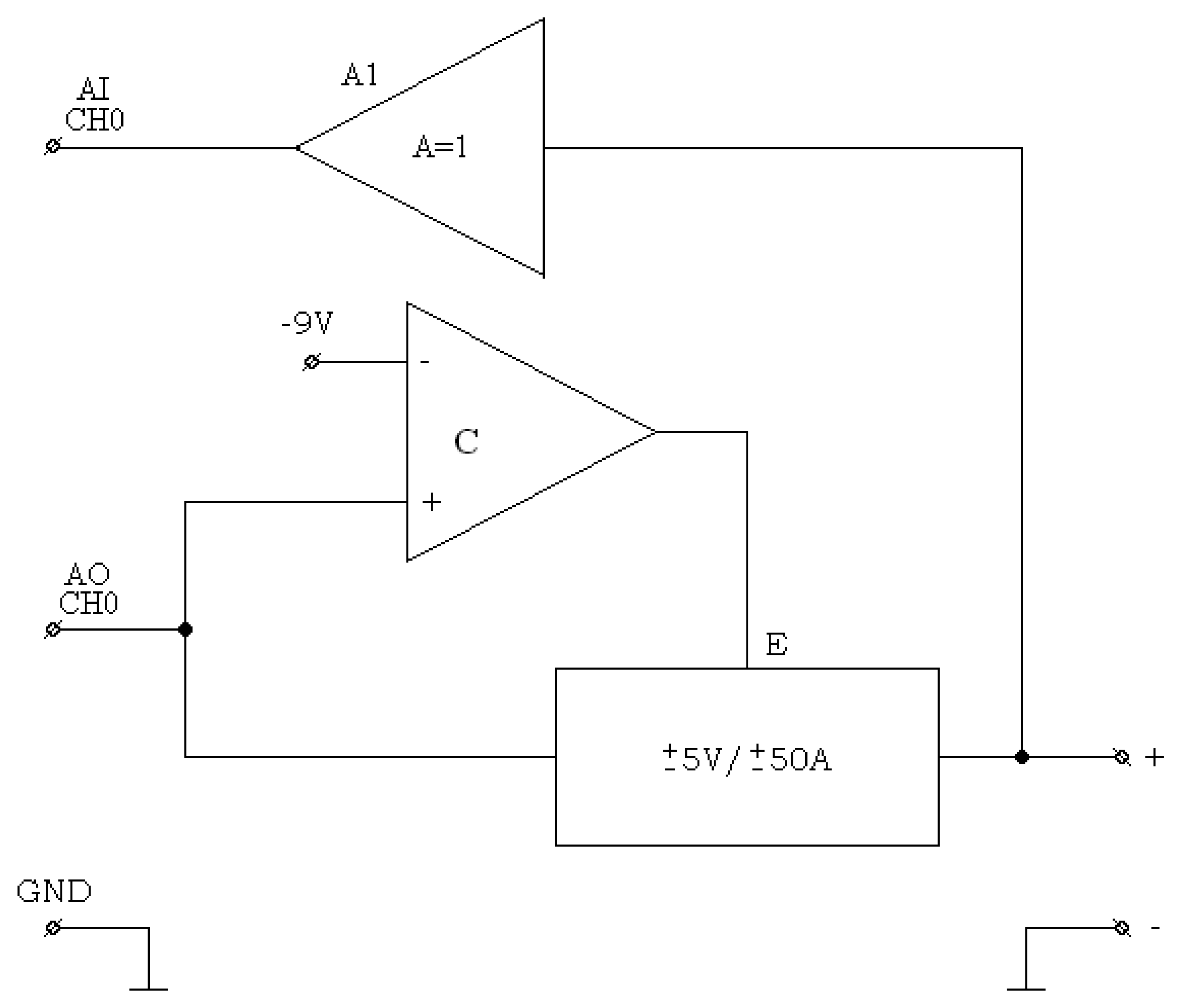
2]. It is a 16-channel AD converter with a 12-bit conversion, that is, the two-channel DA converter, also with a 12-bit conversion. Besides the above mentioned analog channels, the board also has the digital outputs and inputs, the generator of square signals and a 16-bit counter. The measurement and control interface provides the link between the computer and the process. It also performs the signal conditioning. Its block-scheme is given in
Figure 1.
The given shape of the controlling signal is being taken from the analog output – channel 0 (AO − CH0) to the comparator (C), which gives the enabling signal (E) to the outgoing block (± 5 V / ± 50 A) under the condition that the controlling voltage is within permitted limits, i.e. the system is initiated. In that way, the output is being blocked up to the end of the process of initiating the system, in order to avoid uncontrolled load current while switching on.
On channel AI0, the load's voltage is being brought in the AD/DA converter so that the system response can be monitored, that is the voltage on the load.
The second analog output of AD/DA converter can be used for superimposing of DC component with the given shape of the signal. Some other input channels can also be used for taking in the feedbacks as well as monitoring the system parameters (for instance, the temperature).
The assemblies of the current source governed by a voltage will be described in more details. For the controlling voltage within the range of ± 5 V, it provides the current within the range of ± 50 A at the output. The regulator is of a proportional kind with a filter for avoiding the self oscillation.
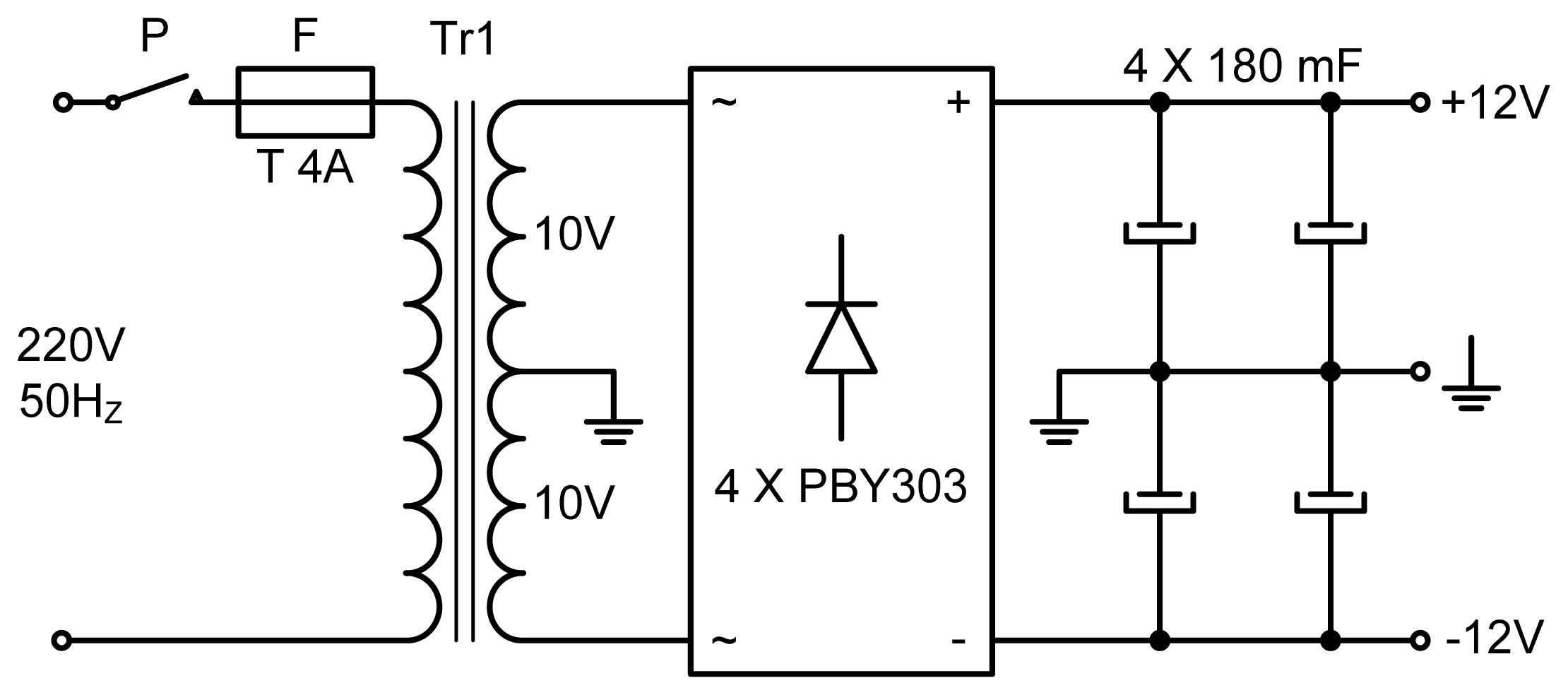
The scheme of the main supply of the system is shown in
Figure 2. In fact, it is the classical bipolar rectifier assembly which provides unstabilized voltage of ± 12 V with the current of up to 50 A. Sstabilization is not necessary as the rectifier supplies the current source [
3]. The element values are given on the scheme.
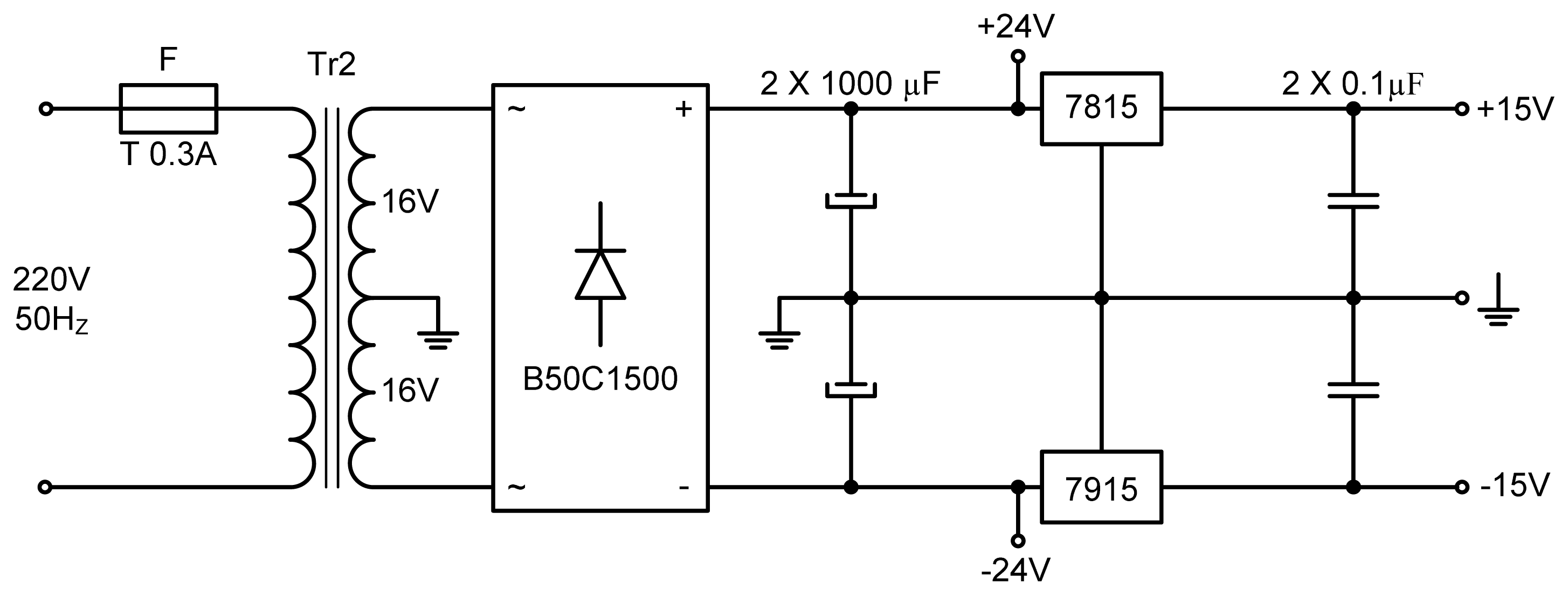
For the supply of the measurement and control electronics, a rectifier ± 24 V has been used with the stabilization of ± 15 V, whose scheme is given in
Figure 3, with all element values.
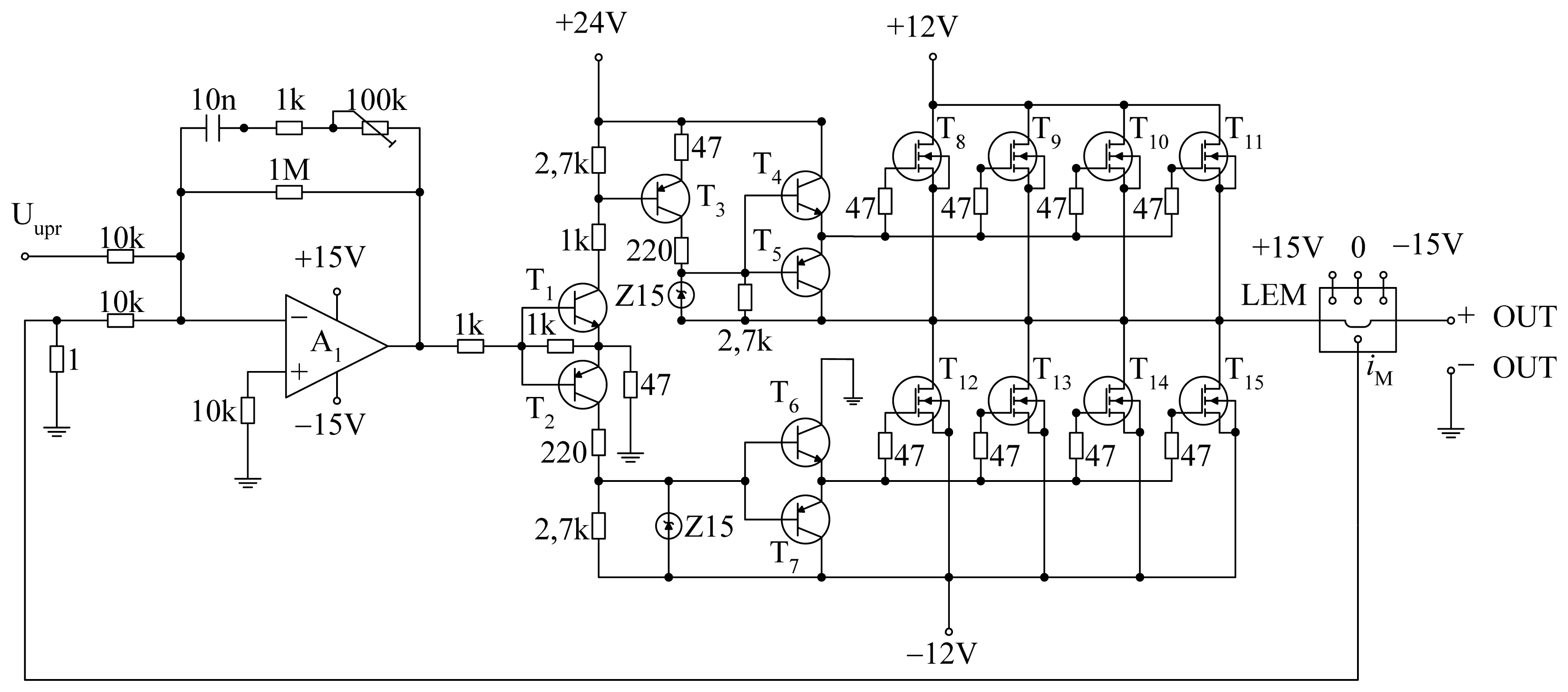
The scheme of the current regulator is given in
Figure 4. The error signal (the difference between the given and measured current) has been intensified by 100 times in a block containing the operational amplifier A1 (type 741) [
4]. The amplified signal, through the transistors T1 − T7 (BC547 NPN and BC 212 PNP), open one or another group of output MOSFET transistors (T8 − T11 or T12 − T15) providing in that way one or other direction of the output current, in accordance with the controlling voltage. The transistors type IRF1010 has been used, four in parallel operation, with the corresponding coolers and forced air cooling. For output current monitoring, a LEM ± 50 A module (CSNP661, Honeywell) has been used, and the values of all passive elements are given on the scheme itself.
3. Software
The software platform was the packet LabVIEW (National Instruments) [
5,
6] which is considered the standard in the world of measurement technique and virtual instruments [
7]. For the connection with the AD/DA converter, that is, with the external world, the Master Link collection of drivers which is provided with the PCI – 2048 W converter has been used.
By the installation of these two packets, as well as AD/DA board, one can obtain a very powerful development system for measurement, control and signal processing (virtual instruments).
The graphical users' interface has two windows: Control panel – for the control and monitoring of the process (the application user uses this window) and the Application scheme – which shows the used virtual instruments, the connections between them, the course of the signal and the error detection.
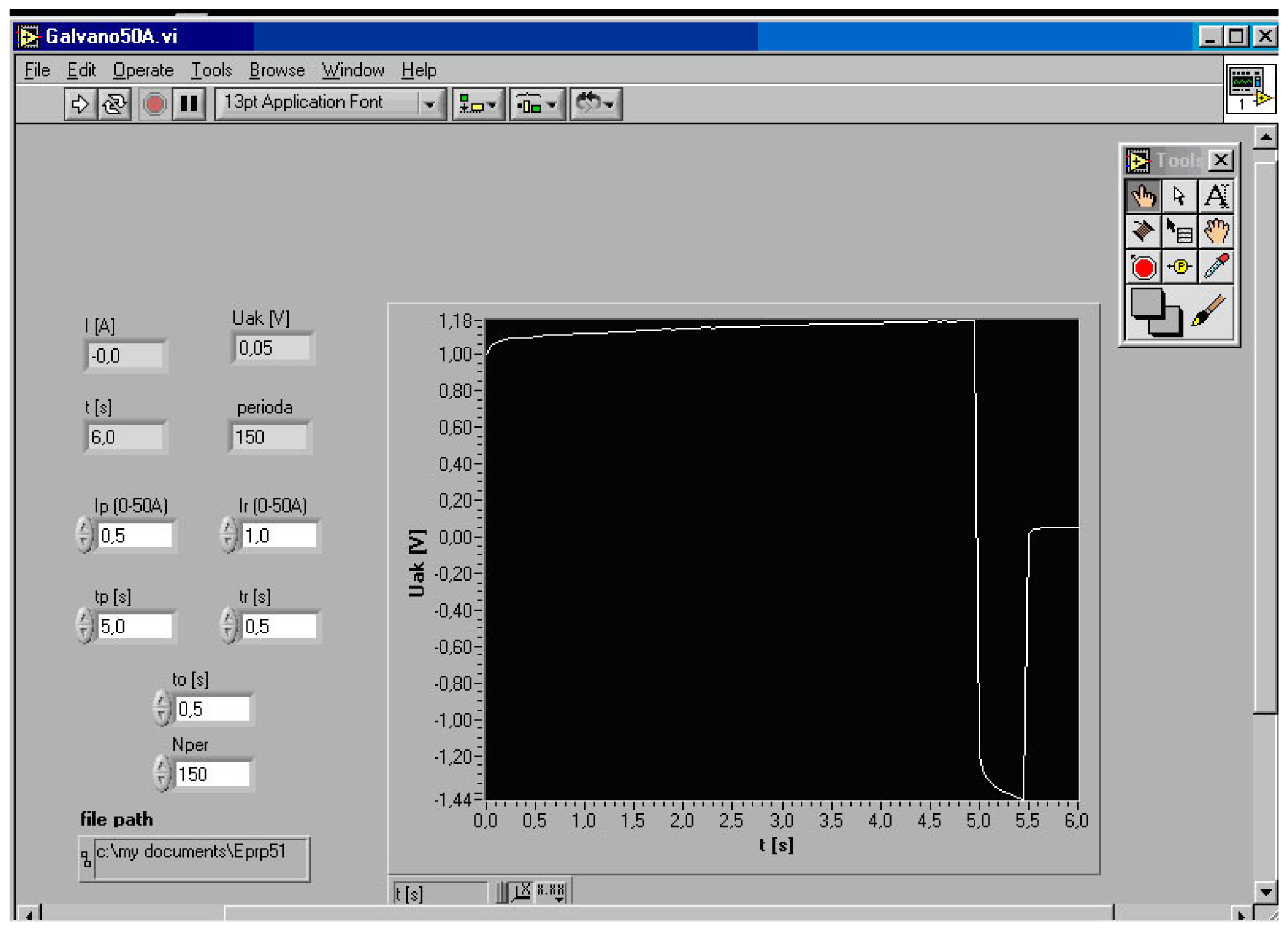
Figure 5 shows an example of the control panel for the case of a rectangular shape current in both directions with the possibility to adjust the time of duration of pulse (t
p), pause (t
0) and reversion (t
r), as well as the current intensity of the pulse (I
p) and reversion (I
r). On the figure the actual values of the current, voltage and time displays are shown and on the graphical display one can monitor the response (the voltage of load) in time. The measured data are being recorded in the form of a table in a file, whose name the user inputs in the determined field on the panel. It is possible to have either manual or automatic choice of the graphical display scale.
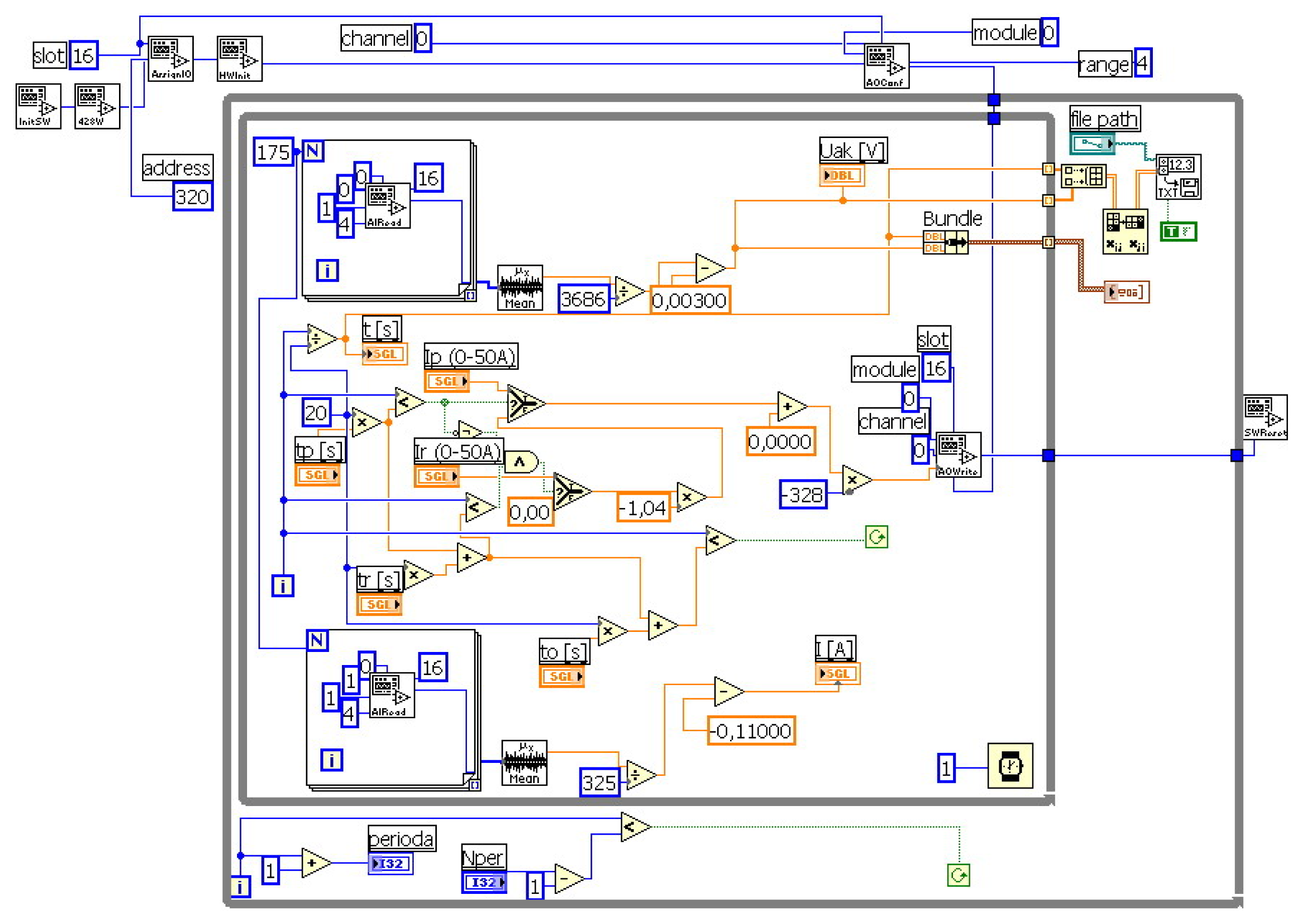
The pulse time, reversion and pause have been adjusted by the controls tp, tr and t0, respectively and the corresponding currents by the controls Ip and Ir. In the shown WHILE loop, the time has been monitored and it has generated the voltage at the output block AOWrite (channel AO0). It is a controlling voltage for the interface where the conversion of voltage into current is done. After the amplifying process is done, the current which has been set by the software, has been obtained on the output. The voltage measurement is done on the cannel AI0. After N sampled values in FOR loop there the averaging (Mean), displaying (Uak) and memorizing of the measured voltage have been performed. The graphical display of voltage in time is also given (Wave form).
The application overall diagram is shown in
Figure 6. Except the shown measuring and control loop, the following program blocks in the initialization section [
8,
9]:
InitSW - software initialization,
428W - the board initialization,
AssignIO - the Input/Output definition,
HWInit - hardware function preparing,
Slot - slot address defining,
Address - address within slots choice, AOConf - output channel configuration,
Channel - number of channels,
Module - module number and
Range - voltage range are used.
3. Conclusions
A prototype of the hardware and also the software of the described bipolar current source for the generation of rectangular, triangle and stepwise forms of the current in time has been developed. It has been constructed, calibrated and tested. The system has been tested with different types of loads with different shapes of output current in millisecond and second range. All the tests showed the remarkably good behavior of the system, that is, very good stability and correctness.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





