Energy-efficient Organization of Wireless Sensor Networks with Adaptive Forecasting


Abstract
:1. Introduction
2. Preliminaries
2.1 Multi-Sensor Model
2.2 Energy Model
3. Collaborative Sensing and Adaptive Estimation
3.1 Target Localization with Multi-sensor Fusion
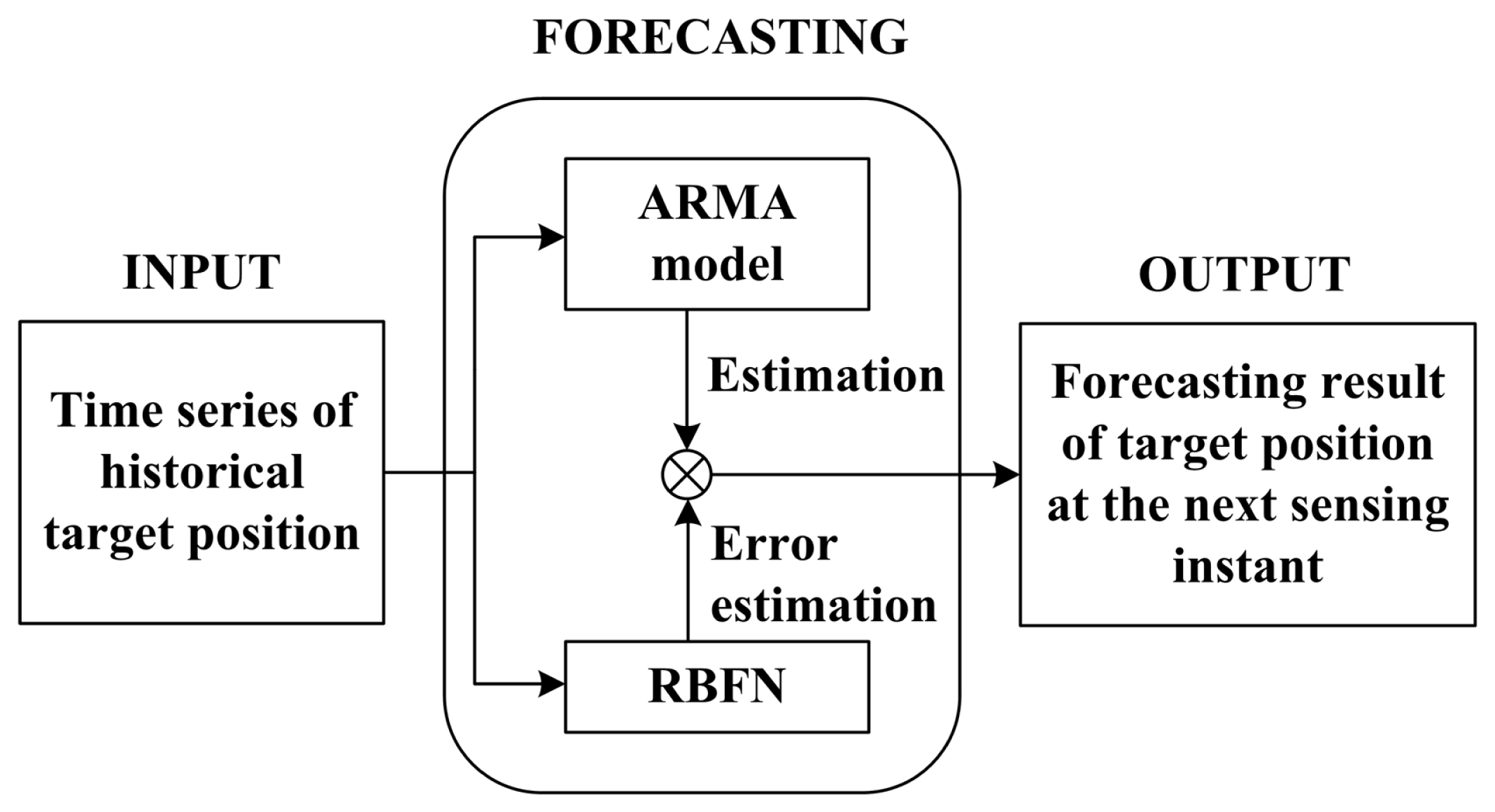
3.2 Adaptive Target Position Forecasting
4. Energy-Efficient Organization Method
4.1 Distributed Sensor Node Awakening
- 1)
- Sleep: It has the lowest power consumption as all the components are inactive. Only the timer-driven awakening is supported, that is, the processor component can be awakened by its own timer. The power consumption is defined as 5mW.
- 2)
- Idle: Only the processor component is active in this mode. All the other components is controlled by the operation system. The power consumption is defined as 25 mW.
- 3)
- Sense: The processor and sensor components are active. In this mode, sensor nodes can acquire the target observations. The power consumption is defined as 40 mW.
- 4)
- Rx: The processor is working and the reception portion of RF circuits is turned on. Sensor nodes can receive request or data. The power consumption is defined as 45 mW.
- 5)
- Rx & tx: The processor is active while both the reception and transmission portions of RF circuits are turned on. Sensor nodes can receive and transmit information. The power consumption is defined as (45+ Ptx) mW, where Ptx is the power consumption of transmission portion according to Section II.
4.2 Dynamic Routing with Ant Colony Optimization
- 1)
- The index of sensor nodes with observations is denoted by {1,2, ⋯,na};
- 2)
- 3)
- A optimal path {λ(1),λ(2),⋯,λ(na)} should be found, where λ(i) ∈ {1,2,⋯,na}. At the beginning, sensor node λ(1) transmits observations to sensor node λ(2). Sensor node λ,(na) can localize the target by data fusion. If i ≠ j, then λ(i) ≠ λ(j). The minimization objective function is:
5. Experimental Results
5.1 Experimentation Platform
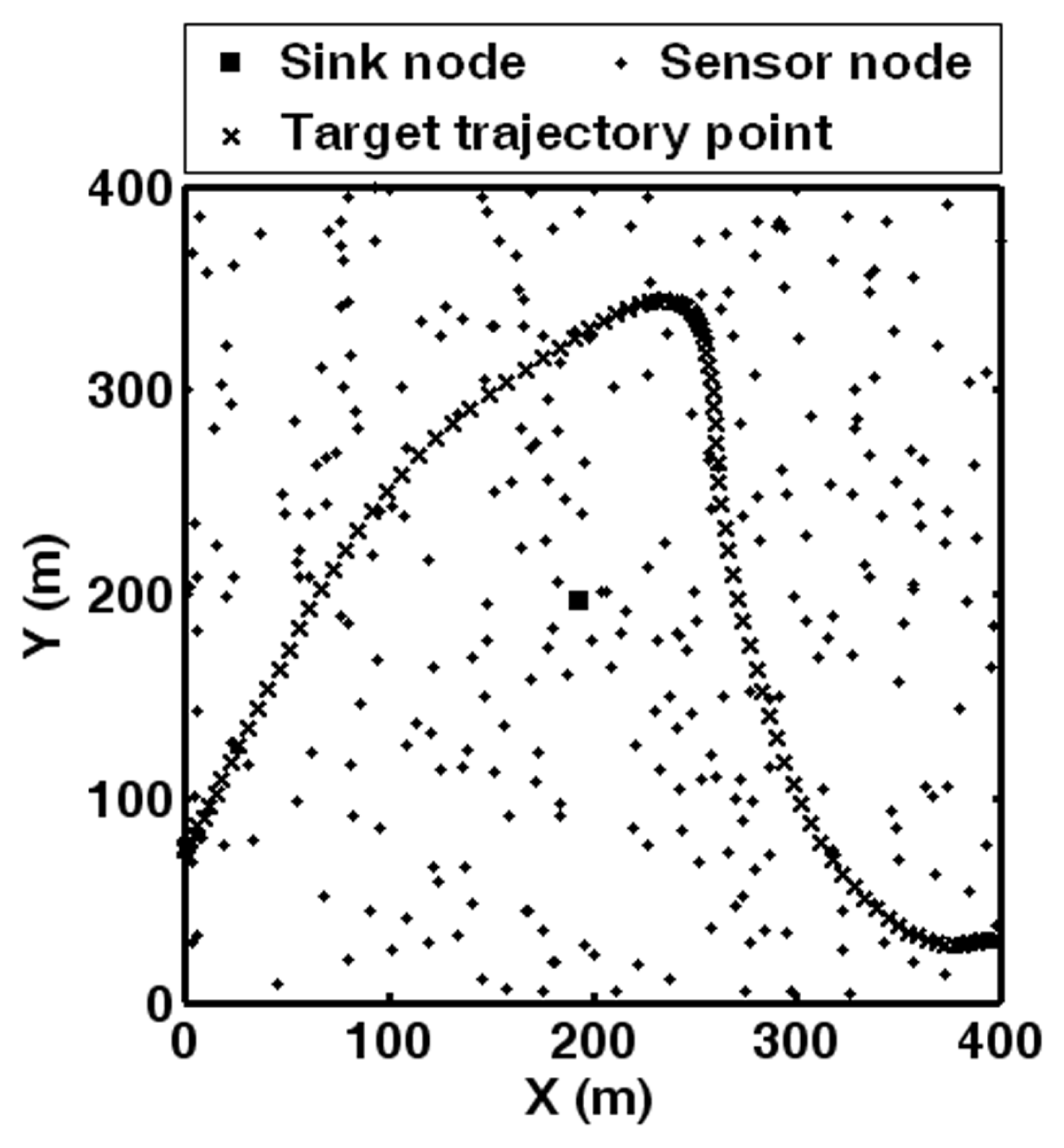
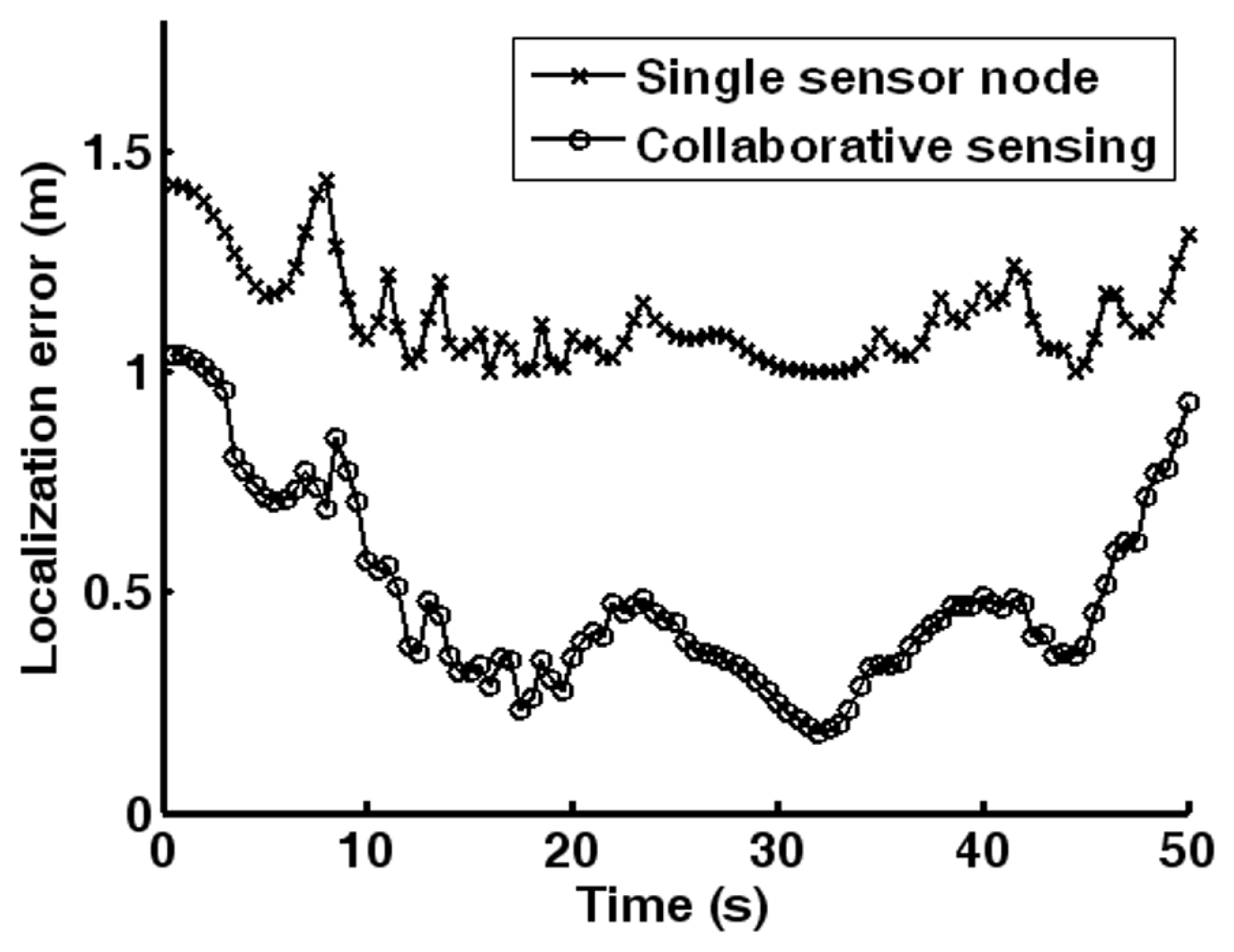
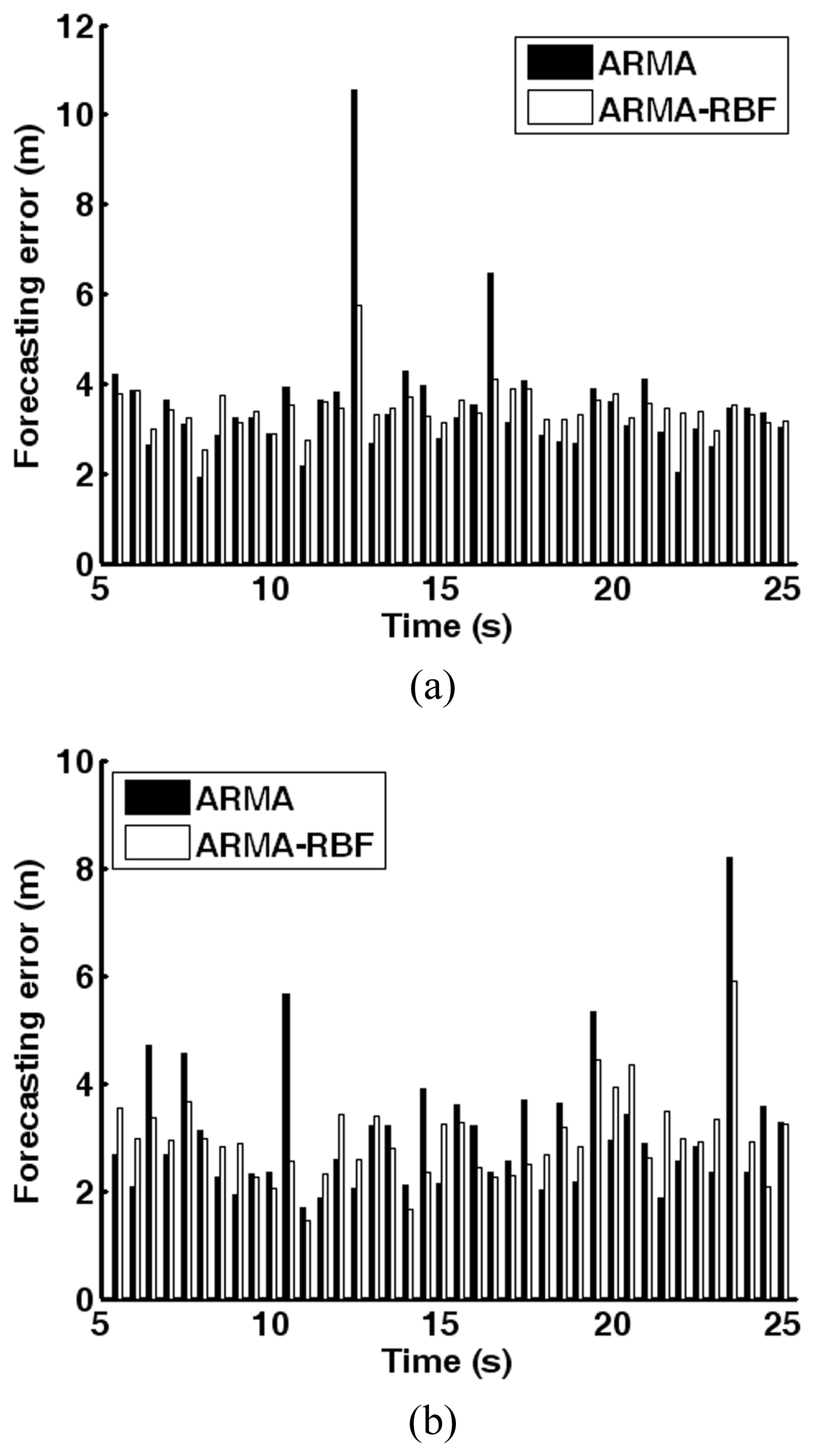
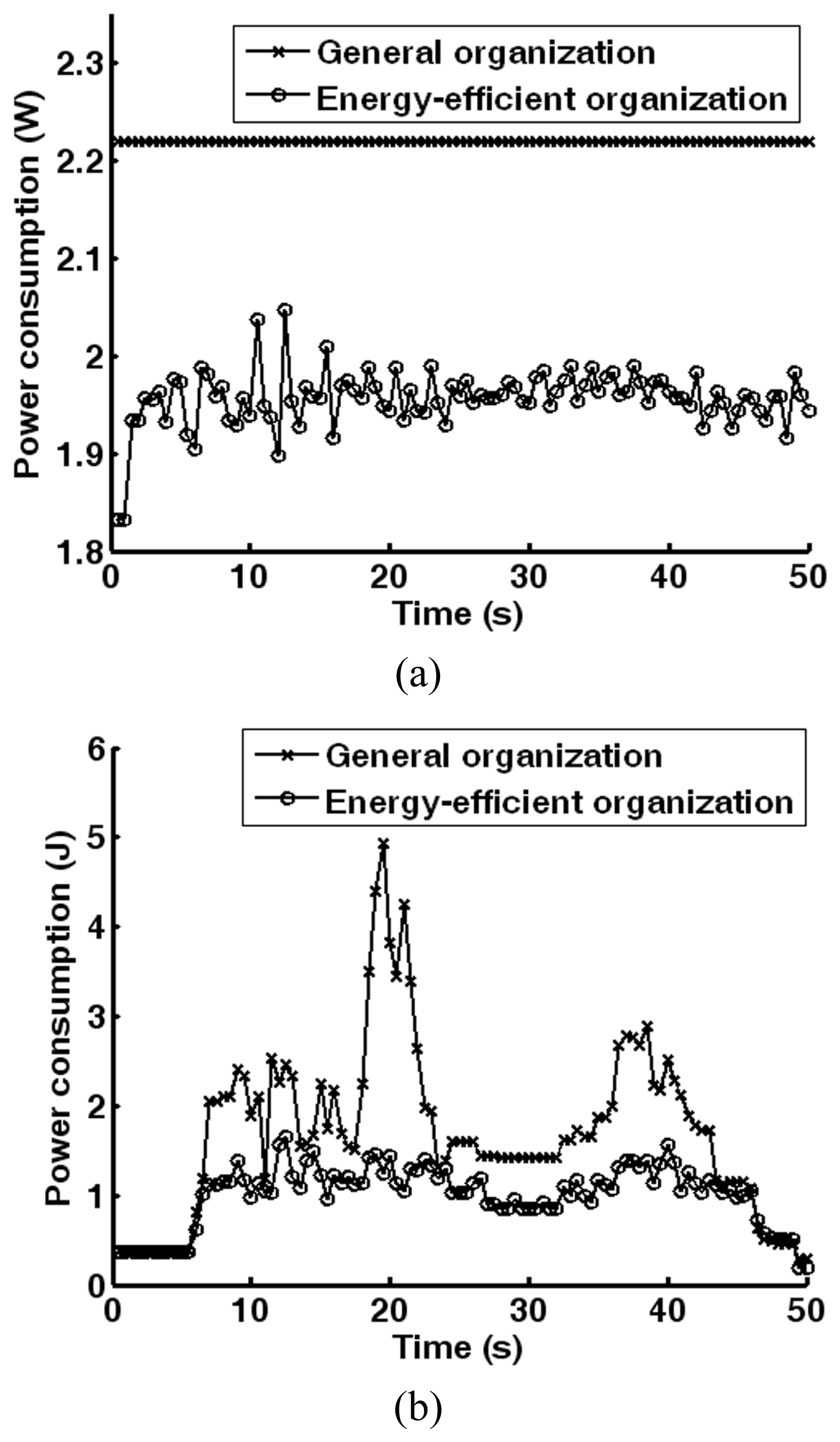
5.2 Target Tracking Experiments
6. Conclusions
Acknowledgments
References and Notes
- Sinha, A. Dynamic power management in wireless sensor networks. IEEE Design and Test of Computers 2001, 18, 62–74. [Google Scholar]
- Duh, F.B.; Lin, C.T. Tracking a maneuvering target using neural fuzzy network. IEEE Transactions on System, Man, and Cybernetics 2004, 34, 16–33. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J. An improved particle filter for target tracking in sensor system. Sensors 2007, 7, 144–156. [Google Scholar]
- Oshman, Y.; Davidson, P. Optimization of observer trajectories for bearings-only target localization. IEEE Transactions on Aerospace and Electronic Systems 1999, 35, 892–902. [Google Scholar]
- Zhang, H. Optimal and self-tuning State estimation for singular stochastic systems: a polynomial equation approach. IEEE Transactions on Circuits and Systems 2004, 51, 327–333. [Google Scholar]
- Lee, M.J.; Choi, Y.K. An adaptive neurocontroller using RBFN for robot manipulators. IEEE Transactions on Industrial Electronics 2004, 51, 711–717. [Google Scholar]
- Zecchin, A.C. Parametric study for an ant algorithm applied to water distribution system optimization. IEEE Transactions on Evolutionary Computation 2005, 9, 175–191. [Google Scholar]
- Wang, X.; Wang, S. Collaborative signal processing for target tracking in distributed wireless sensor networks. Journal of Parallel and Distributed Computing 2007, 67, 501–515. [Google Scholar]
- Wang, X.; Ma, J.; Wang, S.; Bi, D. Prediction-based dynamic energy management in wireless sensor networks. Sensors 2007, 7, 251–266. [Google Scholar]
- Biscainho, L.W.P. AR model estimation from quantized signals. IEEE Signal Processing Letters 2004, 11, 183–185. [Google Scholar]
- Haykin, S. Neural Networks: a Comprehensive Foundation; Prentice Hall: NJ, USA, 1999. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy consumption (J) | General organization | Energy-efficient organization |
|---|---|---|
| Operation | 111.5 | 97.8 |
| Transmission | 84.7 | 50.2 |
© 2008 by MDPI (http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Wang, X.; Wang, S.; Ma, J.-J.; Bi, D.-W. Energy-efficient Organization of Wireless Sensor Networks with Adaptive Forecasting. Sensors 2008, 8, 2604-2616. https://doi.org/10.3390/s8042604
Wang X, Wang S, Ma J-J, Bi D-W. Energy-efficient Organization of Wireless Sensor Networks with Adaptive Forecasting. Sensors. 2008; 8(4):2604-2616. https://doi.org/10.3390/s8042604
Chicago/Turabian StyleWang, Xue, Sheng Wang, Jun-Jie Ma, and Dao-Wei Bi. 2008. "Energy-efficient Organization of Wireless Sensor Networks with Adaptive Forecasting" Sensors 8, no. 4: 2604-2616. https://doi.org/10.3390/s8042604
APA StyleWang, X., Wang, S., Ma, J. -J., & Bi, D. -W. (2008). Energy-efficient Organization of Wireless Sensor Networks with Adaptive Forecasting. Sensors, 8(4), 2604-2616. https://doi.org/10.3390/s8042604