Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm

Abstract
:1. Introduction
2. Fault Diagnosis Algorithm
2.1. Independent Component Analysis
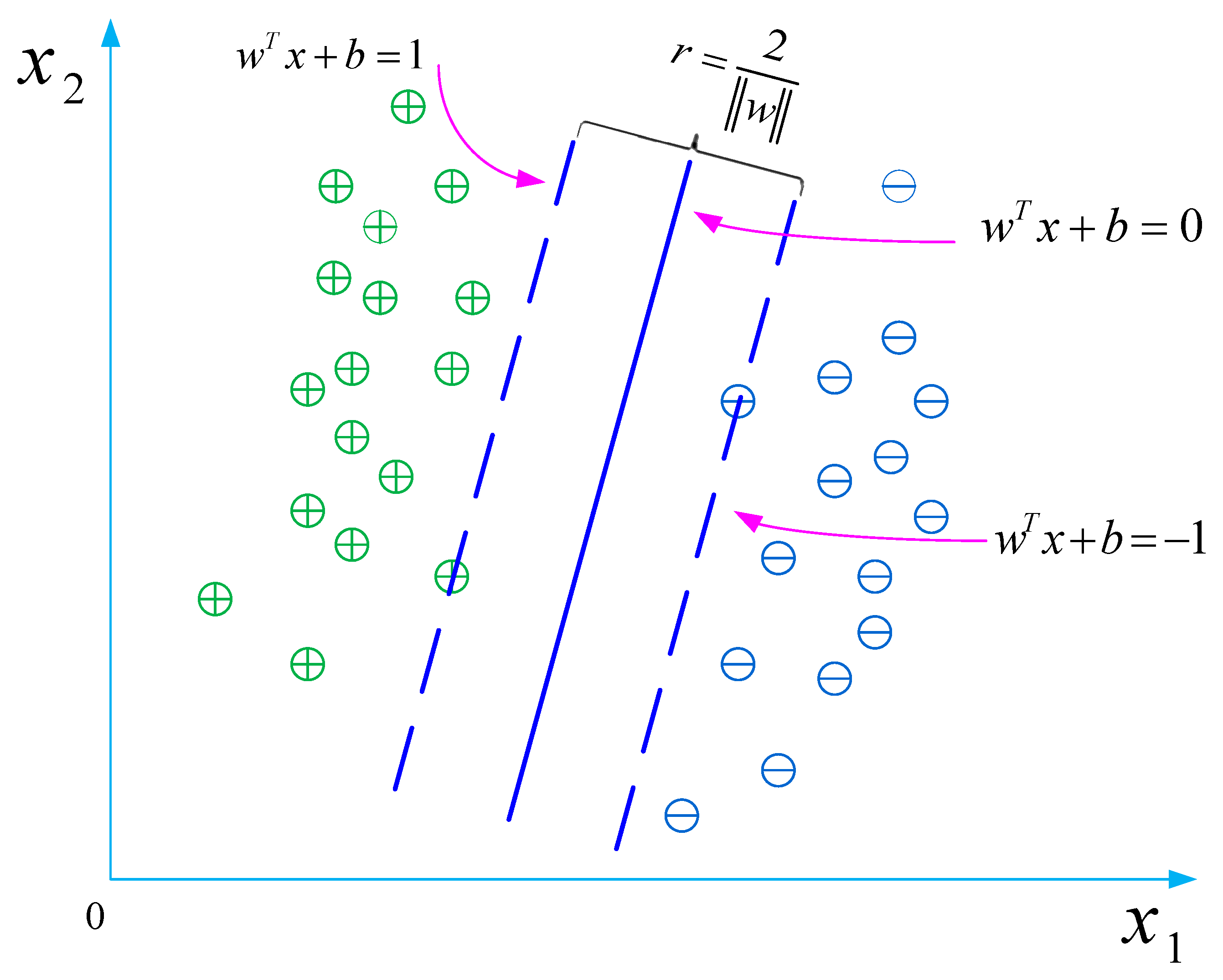
2.2. Support Vector Machines
3. Algorithm Simulation
3.1. Simulation of the Original Signal
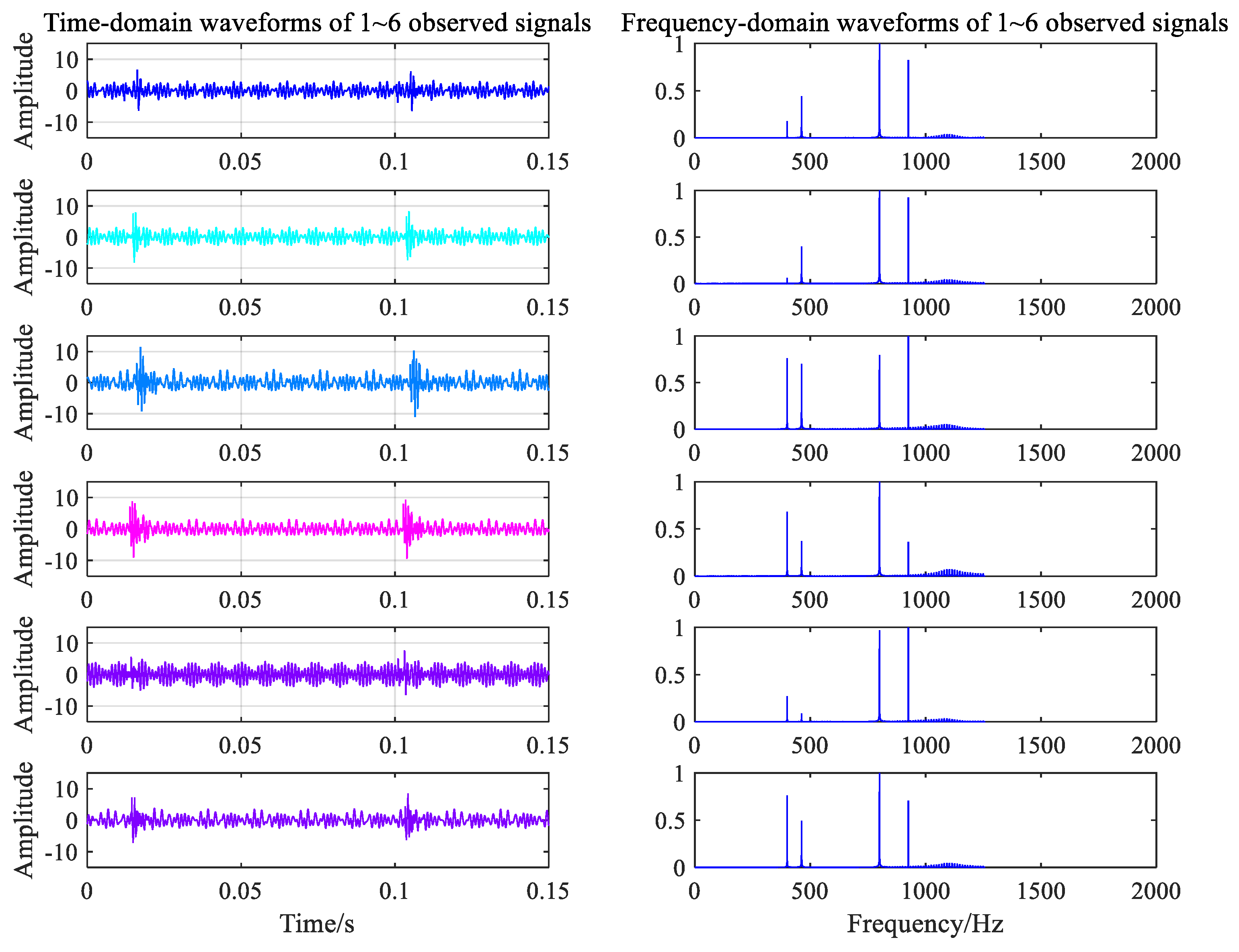
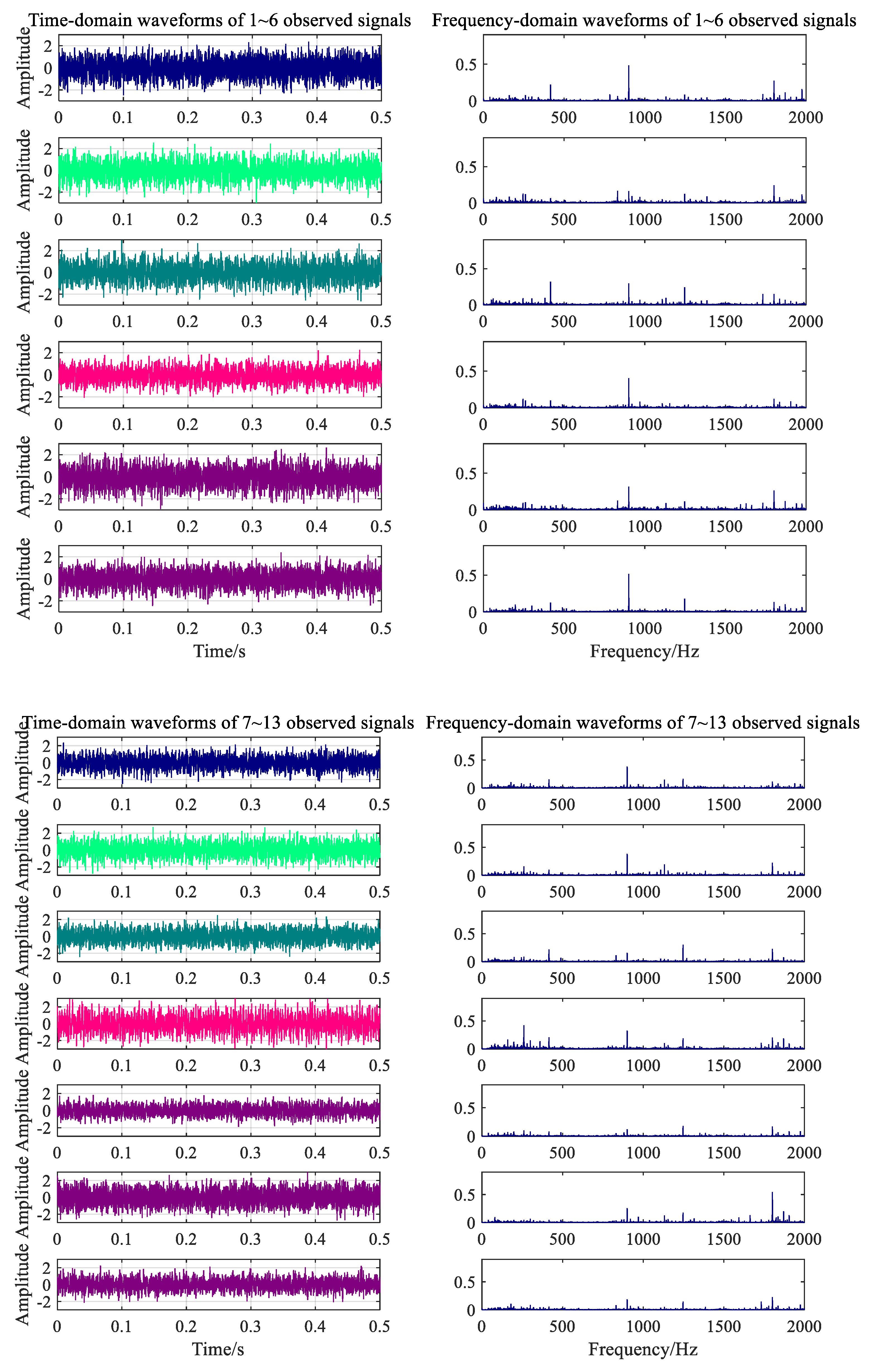
3.2. Simulation of Working Condition Signals
3.3. Feature Extraction
3.4. Fault Identification
4. Noise Diagnosis Experiment of Gearbox Failure
4.1. Construction of Test Platform
4.2. Noise Spectrum Analysis
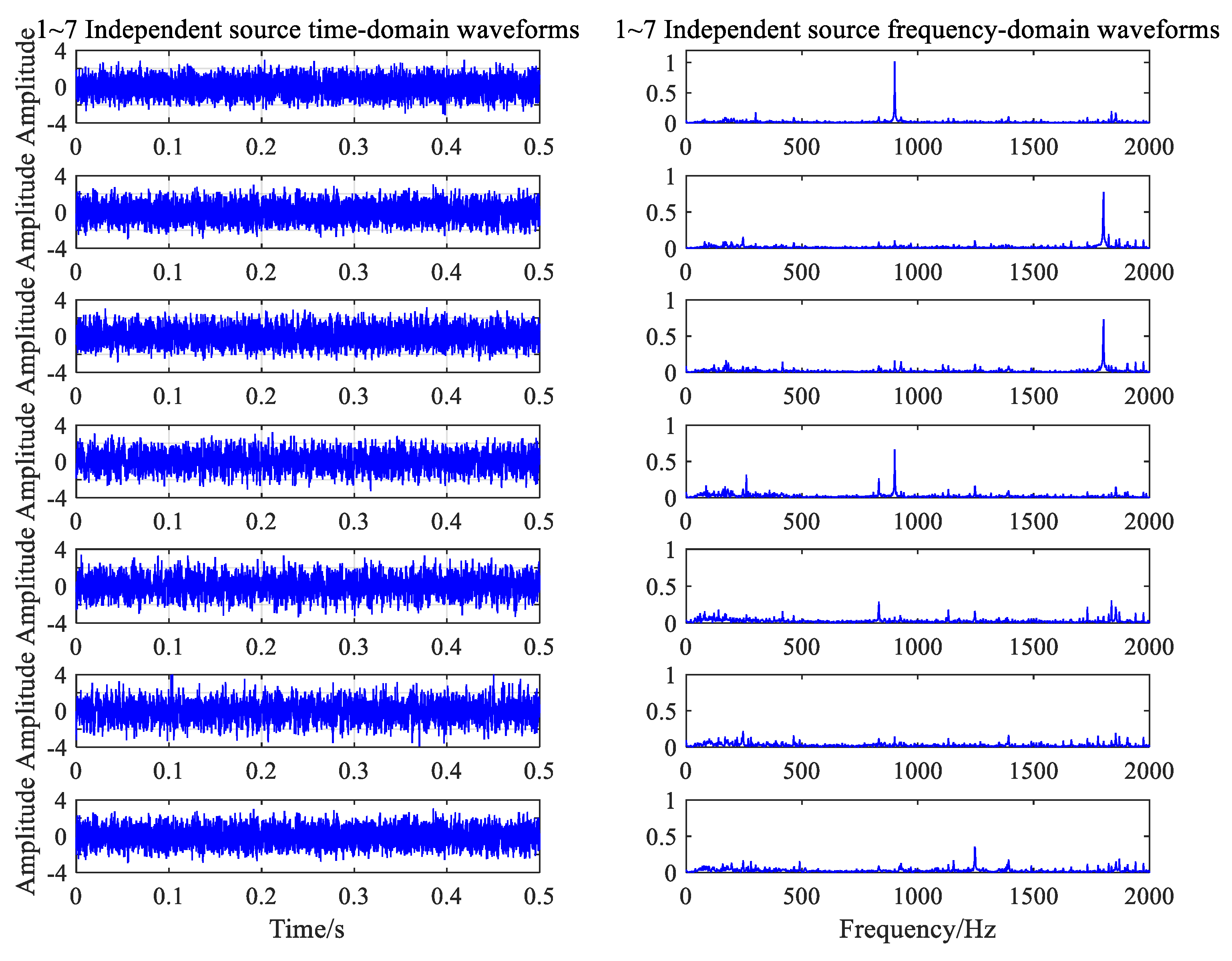
4.3. Independent Source Separation
4.4. Parameter Calculation of SVM
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ding, K.; Zhu, X.; Chen, Y. The vibration characteristics of typical gearbox faults and its diagnosis plan. J. Vib. Shock 2001, 20, 7–12. [Google Scholar]
- Barros, A.K.; Cichocki, A. Extraction of Specific Signals with Temporal Structure. Neural Comput. 2001, 13, 1995–2003. [Google Scholar] [CrossRef] [PubMed]
- Puntonet, C.G.; Lang, E.W. Blind source separation and independent component analysis. Neurocomputing 2006, 69, 1413. [Google Scholar] [CrossRef]
- Barros, A.K.; Carlos Príncipe, J.; Erdogmus, D. Independent Component Analysis and Blind Source Separation. Signal Process. 2007, 87, 1817–1818. [Google Scholar] [CrossRef]
- Žvokelj, M.; Zupan, S.; Prebil, I. EEMD-based multiscale ICA method for slewing bearing fault detection and diagnosis. J. Sound Vib. 2016, 370, 394–423. [Google Scholar] [CrossRef]
- Melissant, C.; Ypma, A.; Frietman, E.E.; Stam, C.J. A method for detection of Alzheimer’s disease using ICA-enhanced EEG measurements. Artif. Intell. Med. 2005, 33, 209–222. [Google Scholar] [CrossRef]
- Gohel, B.; Lee, P.; Kim, M.-Y.; Kim, K.; Jeong, Y. MEG Based Functional Connectivity: Application of ICA to Alleviate Signal Leakage. IRBM 2017, 38, 127–137. [Google Scholar] [CrossRef]
- Back, A.; Weigend, A.S. A First Application of Independent Component Analysis to Extracting Structure from Stock Returns. Int. J. Neural Syst. 1997, 8, 473–484. [Google Scholar] [CrossRef] [Green Version]
- Oja, E.; Kiviluoto, K.; Malaroiu, S. Independent component analysis for financial time series. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000. [Google Scholar]
- Stefatos, G.; Hamza, A.B. Dynamic independent component analysis approach for fault detection and diagnosis. Expert Syst. Appl. 2010, 37, 8606–8617. [Google Scholar] [CrossRef]
- Ajami, A.; Daneshvar, M. Data driven approach for fault detection and diagnosis of turbine in thermal power plant using Independent Component Analysis (ICA). Int. J. Electr. Power Energy Syst. 2012, 43, 728–735. [Google Scholar] [CrossRef]
- Badaoui, M.E.; Danière, J.; Guillet, F.; Servière, C. Separation of combustion noise and piston-slap in diesel engine—Part I: Separation of combustion noise and piston-slap in diesel engine by cyclic Wiener filtering. Mech. Syst. Signal Process. 2005, 19, 1209–1217. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Dong, G.; Zhou, Y. Constrained independent component analysis and its application to machine fault diagnosis. Mech. Syst. Signal Process. 2011, 25, 2501–2512. [Google Scholar] [CrossRef]
- Sun, Z.; Shang, L. An improved constrained ICA with reference based unmixing matrix initialization. Neurocomputing 2010, 73, 1013–1017. [Google Scholar] [CrossRef]
- Feng, L.; Di, T.; Zhang, Y. HSIC-based kernel independent component analysis for fault monitoring. Chemom. Intell. Lab. Syst. 2018, 178, 47–55. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, C. Decentralized fault diagnosis using multiblock kernel independent component analysis. Chem. Eng. Res. Des. 2012, 90, 667–676. [Google Scholar] [CrossRef]
- Widodo, A.; Yang, B.; Han, T. Combination of independent component analysis and support vector machines for intelligent faults diagnosis of induction motors. Expert Syst. Appl. 2007, 32, 299–312. [Google Scholar] [CrossRef]
- Min, J.H.; Lee, Y. Bankruptcy prediction using support vector machine with optimal choice of kernel function parameters. Expert Syst. Appl. 2005, 28, 603–614. [Google Scholar] [CrossRef]
- Danenas, P.; Garsva, G. Selection of Support Vector Machines based classifiers for credit risk domain. Expert Syst. Appl. 2015, 42, 3194–3204. [Google Scholar] [CrossRef]
- Salvati, D.; Drioli, C.; Foresti, G.L. A weighted MVDR beamformer based on SVM learning for sound source localization. Pattern Recognit. Lett. 2016, 84, 15–21. [Google Scholar] [CrossRef]
- Kalantarian, H.; Mortazavi, B.; Pourhomayoun, M.; Alshurafa, N.; Sarrafzadeh, M. Probabilistic Segmentation of Time-Series Audio Signals using Support Vector Machines. Microprocess. Microsyst. 2016, 46, 96–104. [Google Scholar] [CrossRef]
- Manjurul Islam, M.M.; Kim, J. Reliable multiple combined fault diagnosis of bearings using heterogeneous feature models and multiclass support vector Machines. Reliab. Eng. Syst. Saf. 2018. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Wang, X.; Liu, B.; Liang, X. Early fault diagnosis of rolling bearings based on hierarchical symbol dynamic entropy and binary tree support vector machine. J. Sound Vib. 2018, 428, 72–86. [Google Scholar] [CrossRef]
- Samanta, B. Gear fault detection using artificial neural networks and support vector machines with genetic algorithms. Mech. Syst. Signal Process. 2004, 18, 625–644. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Y.; Li, S.; Li, X.; Ma, L. Gear fault diagnosis based on support vector machine optimized by artificial bee colony algorithm. Mech. Mach. Theory 2015, 90, 219–229. [Google Scholar] [CrossRef]
- Saari, J.; Strömbergsson, D.; Lundberg, J.; Thomson, A. Detection and identification of windmill bearing faults using a one-class support vector machine (SVM). Measurement 2019. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, P.; Ni, T.; Cheng, P.; Lei, S. Wind Power Prediction Based on LS-SVM Model with Error Correction. Adv. Electr. Comput. Eng. 2017, 17, 3–8. [Google Scholar] [CrossRef]
- Glowacz, A. Recognition of acoustic signals of induction motor using FFT, SMOFS-10 and LSVM. Eksploat. I Niezawodn. Maint. Reliab. 2015, 17, 569–574. [Google Scholar] [CrossRef]
- Glowacz, A. Recognition of Acoustic Signals of Commutator Motors. Appl. Sci. 2018, 8, 2630. [Google Scholar] [CrossRef] [Green Version]
- He, G.; Ding, K.; Lin, H. Gearbox coupling modulation separation method based on match pursuit and correlation filtering. Mech. Syst. Signal Process. 2016, 66–67, 597–611. [Google Scholar] [CrossRef]
- Zhou, L. Machine Learning; Tsinghua University Press: Beijing, China, 2016. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signals | Expression |
|---|---|
| Normal | |
| Fault |
| Working Condition | NIC1 | NIC2 | NIC3 | FIC1 | FIC2 | FIC3 |
|---|---|---|---|---|---|---|
| Normal1 | 0.5464 | 0.8076 | −0.7904 | 0.1378 | −0.2303 | −0.4007 |
| Normal2 | 0.5008 | 0.5905 | −0.8645 | 0.3234 | −0.3088 | −0.2871 |
| Fault1 | 0.4303 | 0.3140 | −0.5269 | −0.5054 | 0.7256 | 0.2977 |
| Fault2 | 0.3467 | −0.3878 | −0.4345 | −0.5601 | −0.5010 | −0.4469 |
| Normal1 | Normal2 | Fault1 | Fault2 |
|---|---|---|---|
| NIC1 | NIC2 | NIC3 | NIC4 | NIC5 | NIC6 | NIC7 | |
|---|---|---|---|---|---|---|---|
| Normal1 | −0.4457 | 0.3786 | 0.3969 | 0.2652 | −0.0838 | 0.1085 | −0.1083 |
| Normal2 | 0.4512 | 0.3218 | −0.3612 | −0.2755 | −0.0655 | −0.0609 | −0.1400 |
| Fault1 | 0.4594 | 0.2638 | 0.2603 | −0.2019 | 0.0870 | 0.0615 | −0.0734 |
| Fault2 | −0.3279 | −0.3823 | −0.2488 | −0.2905 | −0.0593 | 0.0569 | −0.0725 |
| FIC1 | FIC2 | FIC3 | FIC4 | FIC5 | FIC6 | FIC7 | |
|---|---|---|---|---|---|---|---|
| Normal1 | 0.3504 | −0.441 | 0.1837 | 0.0978 | −0.2111 | −0.1088 | −0.0693 |
| Normal2 | 0.3603 | 0.2635 | −0.1372 | −0.1918 | 0.3860 | 0.0649 | −0.0848 |
| Fault1 | 0.3942 | 0.3173 | −0.1187 | 0.1528 | 0.2563 | 0.0946 | −0.0937 |
| Fault2 | −0.3380 | −0.4281 | 0.1407 | 0.1862 | −0.3218 | 0.1344 | 0.1187 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Zhao, F.; Zhou, J.; Huang, P.; Zhang, X. Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm. Int. J. Environ. Res. Public Health 2019, 16, 4868. https://doi.org/10.3390/ijerph16234868
Chen Z, Zhao F, Zhou J, Huang P, Zhang X. Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm. International Journal of Environmental Research and Public Health. 2019; 16(23):4868. https://doi.org/10.3390/ijerph16234868
Chicago/Turabian StyleChen, Zhongxin, Feng Zhao, Jun Zhou, Panling Huang, and Xutao Zhang. 2019. "Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm" International Journal of Environmental Research and Public Health 16, no. 23: 4868. https://doi.org/10.3390/ijerph16234868
APA StyleChen, Z., Zhao, F., Zhou, J., Huang, P., & Zhang, X. (2019). Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm. International Journal of Environmental Research and Public Health, 16(23), 4868. https://doi.org/10.3390/ijerph16234868