Evaluating the Safety Risk of Rural Roadsides Using a Bayesian Network Method



Abstract
:1. Introduction
2. Literature Review
2.1. Identification of Safety Risk Factors
2.2. Evaluation Methods for Safety Risk
3. Methods
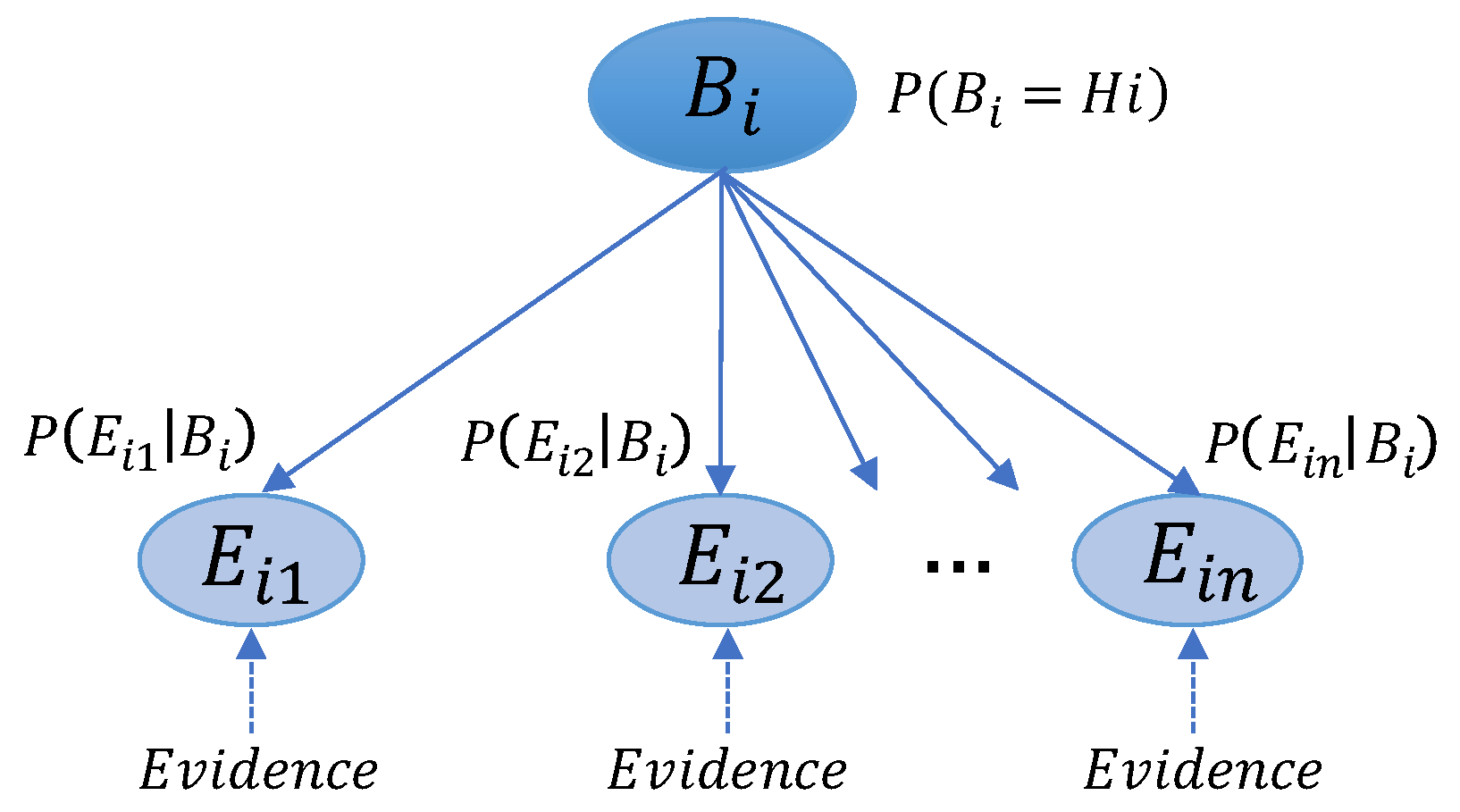
3.1. BN-Based Evaluation Method
3.2. Safety Risk Factors for Rural Roadsides
4. Case Study
4.1. Study Area
4.2. Roadside Safety Risk Evaluation
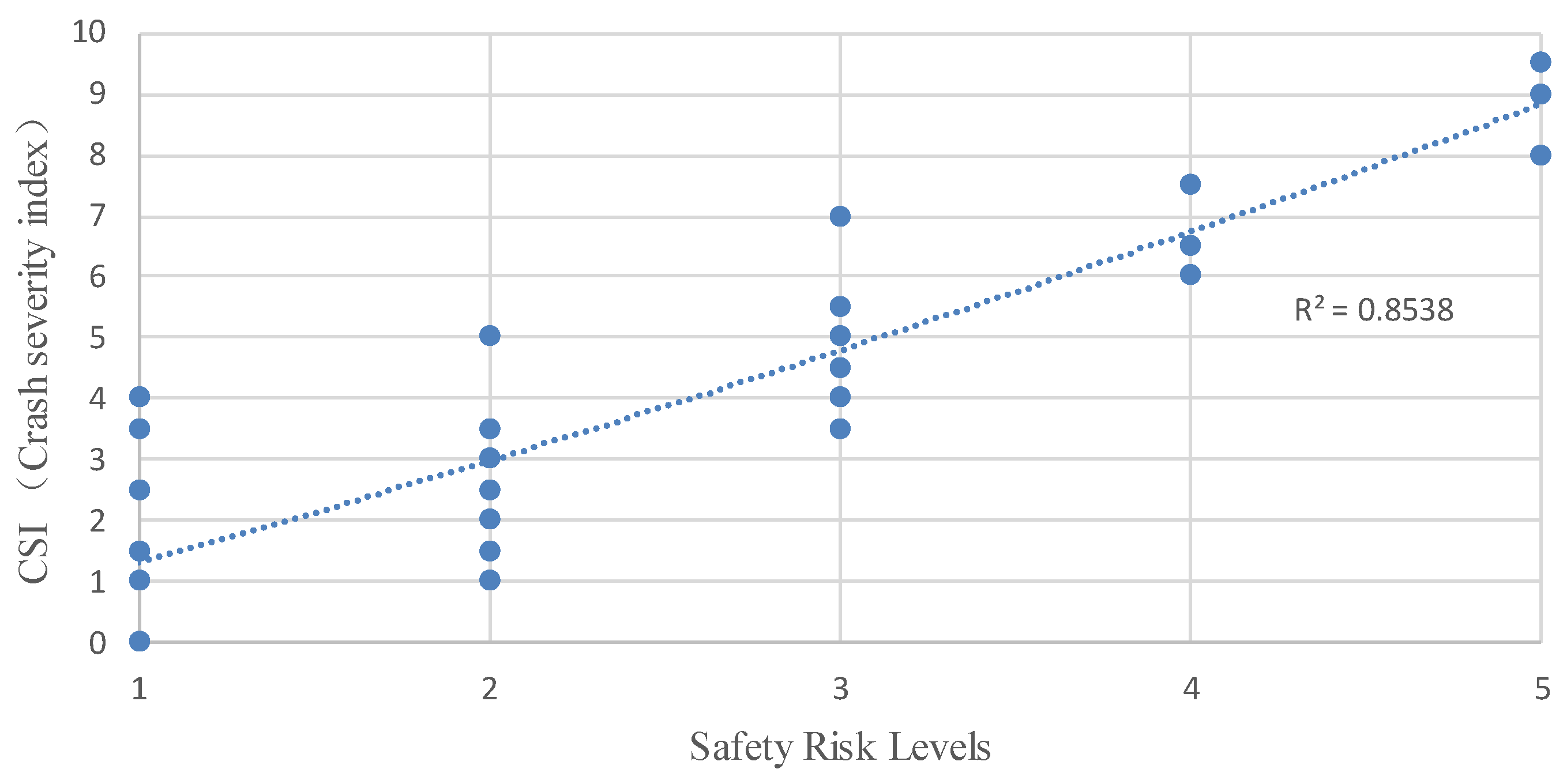
4.3. Effectiveness of Roadside Safety Risk Evaluation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Federal Highway Administration (FHWA). Roadway Departure Safety; Federal Highway Administration (FHWA): Washington, DC, USA, 2014.
- Lord, D.; Brewer, M.A.; Fitzpatrick, K.; Geedipally, S.R.; Peng, Y. Analysis of Roadway Departure Crashes on Two-Lane Rural Roads in Texas; Texas State Publications: Washington, DC, USA, 2011. [Google Scholar]
- Tang, T.P.; Xu, X.Q. Design Guideline for Safety Protection Engineering for Rural Roads in Nantong; Nantong Department of Transportation: Nantong, China, 2017.
- Zegeer, C.V.; Hummer, J.; Reinfurt, D.; Herf, L.; Hunter, W. Safety Effects of Cross-Section Design for Two-Lane Roads; Federal Highway Administration (FHWA): Washington, DC, USA, 1987.
- You, K.S.; Sun, L.; Gu, W.J. Quantitative assessment of roadside safety on mountain road. J. Transp. Eng. Inf. 2010, 8, 49–55. [Google Scholar]
- Loprencipe, G.; Moretti, L.; Gantisani, G.; Minati, P. Prioritization methodology for roadside and guardrail improvement: Quantitative calculation of safety level and optimization of resources allocation. J. Traffic Transp. Eng. (Engl. Ed.). 2018, 5, 348–360. [Google Scholar] [CrossRef]
- Li, Y.; Ma, R.G.; Wang, L.F. Roadside accident-hazard assessment and on-guard protection gradation. J. Saf. Environ. 2009, 9, 143–146. [Google Scholar]
- Pardillo-Mayora, J.M.; Dominguez-Lira, C.A.; Jurado-Pina, R. Empirical calibration of a roadside hazardousness index for Spanish two-lane rural roads. Accid. Anal. Prev. 2010, 42, 2018–2023. [Google Scholar] [CrossRef] [PubMed]
- Esawey, M.E.; Sayed, T. Evaluating safety risk of locating above ground utility structures in the highway right-of-way. Accid. Anal. Prev. 2012, 49, 419–428. [Google Scholar] [CrossRef]
- Park, J.; Abdel-Aty, M. Assessing the safety effects of multiple roadside treatments using parametric and nonparametric approaches. Accid. Anal. Prev. 2015, 83, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.Y.; Zhang, Y. Application of set pair analysis to the road-side risk rating evaluation of rural roads. China Saf. Sci. J. 2011, 21, 9–15. [Google Scholar]
- Fang, Y.; Guo, Z.Y.; Li, Z.Y. Assessment model of roadside environment objective safety on two-lane road. J. Tongji Univ. (Nat. Sci.) 2013, 41, 1025–1030. [Google Scholar]
- Ayati, E.; Pirayesh-Neghab, M.A.; Sadeghi, A.A.; Mohammadzadeh-Moghadam, A. Introducing roadside hazard severity indicator based on evidential reasoning approach. Saf. Sci. 2012, 50, 1618–1626. [Google Scholar] [CrossRef]
- Jalayer, M.; Zhou, H.G. Evaluating the safety risk of roadside features for rural two-lane roads using reliability analysis. Accid. Anal. Prev. 2016, 93, 101–112. [Google Scholar] [CrossRef]
- Stonex, K. Roadside Design for Safety; Proceedings of Highway Research Board: Washington, DC, USA, 1960. [Google Scholar]
- McLaughlin, S.B.; Hankey, J.M.; Klauer, S.K.; Dingus, T.A. Contributing Factors to Run-Off-Road Crashes and Near-Crashes; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2009.
- Fitzpatrick, C.D.; Harrington, C.P.; Knodler, M.A., Jr.; Romoser, M.R.E. The influence of clear zone size and roadside vegetation on driver behavior. J. Saf. Res. 2014, 49, 97–104. [Google Scholar] [CrossRef]
- Sperry, R.; Latterell, J.; McDonald, T. Best Practices for Low-Cost Safety Improvements on Iowa’s Local Roads; Iowa Department of Transportation: Ames, IA, USA, 2008.
- Lee, J.; Mannering, F.L. Impact of roadside features on the frequency and severity of run-off-roadway accidents: An empirical analysis? Accid. Anal. Prev. 2002, 34, 149–161. [Google Scholar] [CrossRef]
- Holdridge, J.M.; Shnakar, V.N.; Ulfarsson, G.F. The crash severity impacts of fixed roadside objects. J. Saf. Res. 2005, 36, 139–147. [Google Scholar] [CrossRef]
- Eustace, D.; Almuntairi, O.; Hovey, P.W.; Shoup, G. Using Decision Tree Modeling to Analyze Factors Contributing to Injury and Fatality of Run-Off-Road Crashes in Ohio; Proceedings of Transportation Research Board: Washington, DC, USA, 2014. [Google Scholar]
- Roque, C.; Moura, F.; Cardoso, J.L. Detecting unforgiving roadside contributors through the severity analysis of run-off-road crashes. Accid. Anal. Prev. 2015, 80, 262–273. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Subramanian, R. Factor Related to Fatal Single-Vehicle Run-Off-Road Crashes; National Highway Traffic Safety Administration (NHTSA): Washington, DC, USA, 2009.
- Roque, C.; Jalayer, M. Improving roadside design policies for safety enhancement using hazard-based duration modeling. Accid. Anal. Prev. 2018, 120, 165–173. [Google Scholar] [CrossRef] [PubMed]
- Williams, K.M.; Stover, V.G.; Dixon, K.K.; Demosthenes, P. Access Management Manual; Transportation Research Board of the National Academies: Washington, DC, USA, 2014. [Google Scholar]
- Levinson, H.S. Impacts of Access Management Techniques; Federal Highway Administration (FHWA): Washington, DC, USA, 1999.
- Mbakwe, A.C.; Saka, A.A.; Choi, K.; Lee, Y.J. Alternative method of highway traffic safety analysis for developing countries using delphi technique and Bayesian network. Accid. Anal. Prev. 2016, 93, 135–146. [Google Scholar] [CrossRef] [PubMed]
- Ona, J.D.; Lopez, G.; Mujalli, R.; Calvo, F.J. Analysis of traffic accidents on rural highways using Latent Class Clustering and Bayesian Networks. Accid. Anal. Prev. 2013, 51, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ona, J.D.; Mujalli, R.O.; Calvo, F.J. Analysis of traffic accident injury severity on Spanish rural highways using Bayesian networks. Accid. Anal. Prev. 2011, 43, 402–411. [Google Scholar] [CrossRef] [Green Version]
- Gregoriades, A.; Mouskos, K.C. Black spots identification through a Bayesian Networks quantification of accident risk index. Transp. Res. Part C Emerg. Technol. 2013, 28, 28–43. [Google Scholar] [CrossRef]
- Sun, J.; Sun, J. A dynamic Bayesian network model for real-time crash prediction using traffic speed conditions data. Transp. Res. Part C Emerg. Technol. 2015, 54, 176–186. [Google Scholar] [CrossRef]
- Chen, F.; Chen, S.; Ma, X. Analysis of hourly crash likelihood using unbalanced panel data mixed logit model and real-time driving environmental big data. J. Saf. Res. 2018, 65, 153–159. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Chen, S. Injury severities of truck drivers in single- and multi-vehicle accidents on rural highway. Accid. Anal. Prev. 2011, 43, 1677–1688. [Google Scholar] [CrossRef]
- Ma, X.; Chen, S.; Chen, F. Multivariate space-time modeling of crash frequencies by injury severity levels. Anal. Methods Accid. Res. 2017, 15, 29–40. [Google Scholar] [CrossRef]
- Wen, H.; Zhang, X.; Zeng, Q.; Lee, J.; Yuan, Q. Investigating spatial autocorrelation and spillover effects in freeway crash-frequency data. Int. J. Environ. Res. Public Health 2019, 16, 219. [Google Scholar] [CrossRef]
- Shi, L.; Huseynova, N.; Yang, B.; Li, C.; Gao, L. A cask evaluation model to assess safety in Chinese rural roads. Sustainability 2018, 10, 3864. [Google Scholar] [CrossRef]
- Fenton, N.; Neil, M.; Marsh, W.; Hearty, P.; Radliński, Ł. On the effectiveness of early life cycle defect prediction with Bayesian Nets. Empir. Softw. Eng. 2008, 13, 499–537. [Google Scholar] [CrossRef] [Green Version]
- Fenton, N.; Radliński, Ł.; Neil, M. Improved Bayesian Networks for software project risk assessment using dynamic discretization. Softw. Eng. Techniq. De. Qual. 2009, 227, 139–148. [Google Scholar]
- Dialsingh, I. Risk assessment and decision analysis with Bayesian networks. J. Appl. Stat. 2014, 41, 910. [Google Scholar] [CrossRef]
- Marquez, D.; Neil, M.; Fenton, N. Improved reliability modeling using Bayesian networks and dynamic discretization. Reliab. Eng. Syst. Saf. 2010, 95, 412–425. [Google Scholar] [CrossRef]
- Fenton, N.; Neil, M. Decision support software for probabilistic risk assessment using Bayesian Networks. IEEE Softw. 2014, 31, 21–26. [Google Scholar] [CrossRef]
- Ha, J.S.; Seong, P.H. A method for risk-informed safety significance categorization using the analytic hierarchy process and bayesian belief networks. Reliab. Eng. Syst. Saf. 2004, 83, 1–15. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Type | Methods | References |
|---|---|---|
| Multi-index comprehensive evaluation method | Roadside hazard rating (RHR) system | Zegeer et al. (1987) [4] |
| A roadside dangerous index | You et al. (2010) [5] | |
| Hazard index | Loprencipe et al. (2018) [6] | |
| Mathematical statistical analysis | Grey cluster model | Li, Ma and Wang (2009) [7] |
| Cluster analysis | Pardillo-Mayora et al. (2010) [8] | |
| Negative binomial regression | Esawey and Sayed (2012) [9] | |
| Cross-sectional method | Park and Abdel-Aty (2015) [10] | |
| Fuzzy synthetic method | A set pair analysis model | Wei and Zhang (2011) [11] |
| Fuzzy judgment | Fang et al. (2013) [12] | |
| Probability theory | Evidential reasoning method | Ayati et al. (2012) [13] |
| Reliability analysis | Jalayer and Zhou (2016) [14] |
| Degree of Safety Risk | ||
|---|---|---|
| Very significant | 0.8–1.0 (0.9) | 0.0–0.2 (0.1) |
| Significant | 0.6–0.8 (0.7) | 0.2–0.4 (0.3) |
| Potentially significant | 0.4–0.6 (0.5) | 0.4–0.6 (0.5) |
| Low significant | 0.2–0.4 (0.3) | 0.6–0.8 (0.7) |
| Very low significant | 0.0–0.2 (0.1) | 0.8–1.0 (0.9) |
| Band Values | Safety Risk Level |
|---|---|
| 1-level | |
| 2-level | |
| 3-level | |
| 4-level | |
| 5-level |
| SN | Main Factors | References |
|---|---|---|
| 1 | Horizontal curves radius | Liu and Subramanian (2009) [23], Mclaughlin et al. (2009) [16], Wei and Zhang (2011) [11], Lord et al. (2011) [2], Fang et al. (2013) [12], Eustace et al. (2014) [21], Roque et al. (2015) [22], Roque and Jalayer (2018) [24], Loprencipe et al. (2018) [6] |
| 2 | Longitudinal gradient | Liu and Subramanian (2009) [23], Li, Ma and Wang (2009) [7], Wei and Zhang (2011) [11], Fang et al. (2013) [12], Eustace et al. (2014) [21], Roque and Jalayer (2018) [24], Loprencipe et al. (2018) [6] |
| 3 | Side slope grade | Stonex (1960) [15], Zegeer et al. (1987) [4], Lee and Mannering (2002) [19], Mclaughlin et al. (2009) [16], Li, Ma and Wang (2009) [7], Pardillo-Mayora et al. (2010) [8], You et al. (2010) [5], Lord et al. (2011) [2], Roque et al. (2015) [22], Jalayer and Zhou (2016) [14] |
| 4 | Side slope height | |
| 5 | Distance between roadway edge and non-traversable obstacles | Zegeer et al. (1987) [4], Lee and Mannering (2002) [19], Sperry et al. (2008) [18], Li, Ma and Wang (2009) [7], Pardillo-Mayora et al. (2010) [8], You et al. (2010) [5], Wei and Zhang (2011) [11], Lord et al. (2011) [2], Esawey and Sayed (2012) [9], Fang et al. (2013) [12], Fitzpatrick et al. (2014) [17], Park and Abdel-Aty (2015) [10], Jalayer and Zhou (2016) [14], Roque and Jalayer (2018) [24] |
| 6 | Density of discrete non-traversable obstacles (e.g., trees, utility poles, buildings, etc.) | Stonex (1960) [15], Lee and Mannering (2002) [19], Holdridge et al. (2005) [20], Sperry et al. (2008) [18], Li, Ma and Wang (2009) [7], You et al. (2010) [5], Esawey and Sayed (2012) [9], Ayati et al. (2012) [13], Park and Abdel-Aty (2015) [10], Loprencipe et al. (2018) [6] |
| 7 | Density of continuous non-traversable obstacles (e.g., worn out roadside safety barriers, unprotected drainage channels, etc.) | Stonex (1960) [15], Holdridge et al. (2005) [20], Sperry et al. (2008) [18], Li, Ma and Wang (2009) [7], You et al. (2010) [5], Ayati et al. (2012) [13], Loprencipe et al. (2018) [6] |
| 8 | Bridge rails | Holdridge et al. (2005) [20] |
| 9 | Speed limit | Liu and Subramanian (2009) [23] |
| 10 | Lighting conditions | Liu and Subramanian (2009) [23] |
| 11 | Traffic volume | Lord et al. (2011) [2] |
| 12 | Sight distance | Wei and Zhang (2011) [11] |
| 13 | Lane width | Roque and Jalayer (2018) [24] |
| Factors | Expert Panel-1 | Expert Panel-2 | Expert Panel-3 | |||
|---|---|---|---|---|---|---|
| Criteria | Criteria | Criteria | ||||
(m) | <30 | 0.5 | <20 | 0.6 | <15 | 0.7 |
| [30,60] | 0.3 | [20,40) | 0.4 | [15,30) | 0.5 | |
| >60 | 0.1 | [40,60] | 0.2 | [30,45) | 0.3 | |
| - | - | >60 | 0.1 | [45,60] | 0.2 | |
| - | - | - | - | >60 | 0.1 | |
(%) | >3.0 | 0.5 | >4.0 | 0.6 | >3.0 | 0.5 |
| [1.0,3.0] | 0.35 | [2.0,4.0] | 0.45 | [2.0,3.0] | 0.4 | |
| <1.0 | 0.1 | [1.0,2.0) | 0.3 | [1.0,2.0) | 0.25 | |
| - | - | <1.0 | 0.15 | <1.0 | 0.1 | |
(m) | <1.0 | 0.5 | <0.5 | 0.6 | <0.5 | 0.6 |
| [1.0,1.5] | 0.3 | [0.5,1.0) | 0.4 | [0.5,1.0) | 0.45 | |
| >1.5 | 0.1 | [1.0,1.5] | 0.2 | [1.0,1.5) | 0.35 | |
| - | - | >1.5 | 0.1 | [1.5,2.0] | 0.25 | |
| - | - | - | - | >2.0 | 0.1 | |
| >1:1 | 0.5 | >1:1 | 0.6 | >1:1 | 0.5 | |
| [1:4,1:1] | 0.35 | [1:2,1:1] | 0.45 | [1:3,1:1] | 0.4 | |
| <1:4 | 0.15 | [1:4,1:2) | 0.2 | [1:4,1:3) | 0.25 | |
| - | - | <1:4 | 0.1 | <1:4 | 0.1 | |
(m) | >1.5 | 0.4 | >2.0 | 0.5 | >3.0 | 0.6 |
| [0.5,1.5] | 0.25 | [1.0,2.0] | 0.4 | [2.0,3.0] | 0.5 | |
| <0.50 | 0.15 | [0.5,1.0) | 0.2 | [1.0,2.0) | 0.35 | |
| - | - | <0.50 | 0.1 | <1.0 | 0.2 | |
(point/km) | >20 | 0.6 | >20 | 0.5 | >25 | 0.6 |
| [10,20] | 0.45 | [10,20] | 0.4 | [10,25] | 0.45 | |
| <10 | 0.2 | [5,10) | 0.2 | [5,15) | 0.25 | |
| - | - | <5 | 0.1 | <5 | 0.15 | |
(obstacle/km) | >30 | 0.4 | >40 | 0.5 | >30 | 0.5 |
| [10,30] | 0.2 | [20,40] | 0.3 | (20,30] | 0.35 | |
| <10 | 0.1 | <20 | 0.2 | [10,20] | 0.2 | |
| - | - | - | - | <10 | 0.1 | |
(km/km) | >0.2 | 0.4 | >0.3 | 0.45 | >0.3 | 0.4 |
| [0.1,0.2] | 0.25 | [0.1,0.3] | 0.3 | (0.2,0.3] | 0.35 | |
| <0.1 | 0.1 | <0.1 | 0.15 | [0.1,0.2] | 0.2 | |
| - | - | - | - | <0.1 | 0.1 | |
| Expert Panel | Conditional Probability Falling in | Conditional Probability Falling in |
|---|---|---|
| Expert panel-1 | ||
| Expert panel-2 | ||
| Expert panel-3 | ||
| Category (Coefficient) | Frequency | Percentage | |
|---|---|---|---|
| Crash severity | Fatal (2.0) | 12 | 6.0% |
| Injury (1.5) | 76 | 38.2% | |
| Property Damage Only (PDO) (1.0) | 111 | 55.8% | |
| No Crash (NC) (0) | 0 | 0.0% | |
| Total | 199 | 100% | |
| Crash frequency (number of ROR crashes per segment) | 0 | 8 | 8.1% |
| 1 | 22 | 22.2% | |
| 2 | 35 | 35.4% | |
| 3 | 25 | 25.2% | |
| ≥4 | 9 | 9.1% | |
| Total | 99 | 100% | |
| CSI Corresponding to Levels in an Experiment Group | CSI Corresponding to Levels in a Control Group | |||||||
|---|---|---|---|---|---|---|---|---|
| Levels | Mean | SD | Min. | Max. | Mean | SD | Min. | Max. |
| 1 | 1.32 | 0.841 | 0.0 | 4.0 | 1.72 | 1.087 | 0.0 | 5.5 |
| 2 | 2.95 | 0.772 | 1.0 | 5.0 | 2.82 | 1.965 | 0.0 | 9.0 |
| 3 | 4.90 | 1.020 | 3.5 | 7.0 | 5.10 | 1.758 | 3.0 | 8.0 |
| 4 | 6.69 | 0.496 | 6.0 | 7.5 | 5.31 | 2.076 | 1.0 | 7.5 |
| 5 | 8.83 | 0.624 | 8.0 | 9.5 | 6.33 | 2.461 | 3.5 | 9.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, T.; Zhu, S.; Guo, Y.; Zhou, X.; Cao, Y. Evaluating the Safety Risk of Rural Roadsides Using a Bayesian Network Method. Int. J. Environ. Res. Public Health 2019, 16, 1166. https://doi.org/10.3390/ijerph16071166
Tang T, Zhu S, Guo Y, Zhou X, Cao Y. Evaluating the Safety Risk of Rural Roadsides Using a Bayesian Network Method. International Journal of Environmental Research and Public Health. 2019; 16(7):1166. https://doi.org/10.3390/ijerph16071166
Chicago/Turabian StyleTang, Tianpei, Senlai Zhu, Yuntao Guo, Xizhao Zhou, and Yang Cao. 2019. "Evaluating the Safety Risk of Rural Roadsides Using a Bayesian Network Method" International Journal of Environmental Research and Public Health 16, no. 7: 1166. https://doi.org/10.3390/ijerph16071166
APA StyleTang, T., Zhu, S., Guo, Y., Zhou, X., & Cao, Y. (2019). Evaluating the Safety Risk of Rural Roadsides Using a Bayesian Network Method. International Journal of Environmental Research and Public Health, 16(7), 1166. https://doi.org/10.3390/ijerph16071166