An Acceleration Based Fusion of Multiple Spatiotemporal Networks for Gait Phase Detection


Abstract
:1. Introduction
2. Materials and Methods
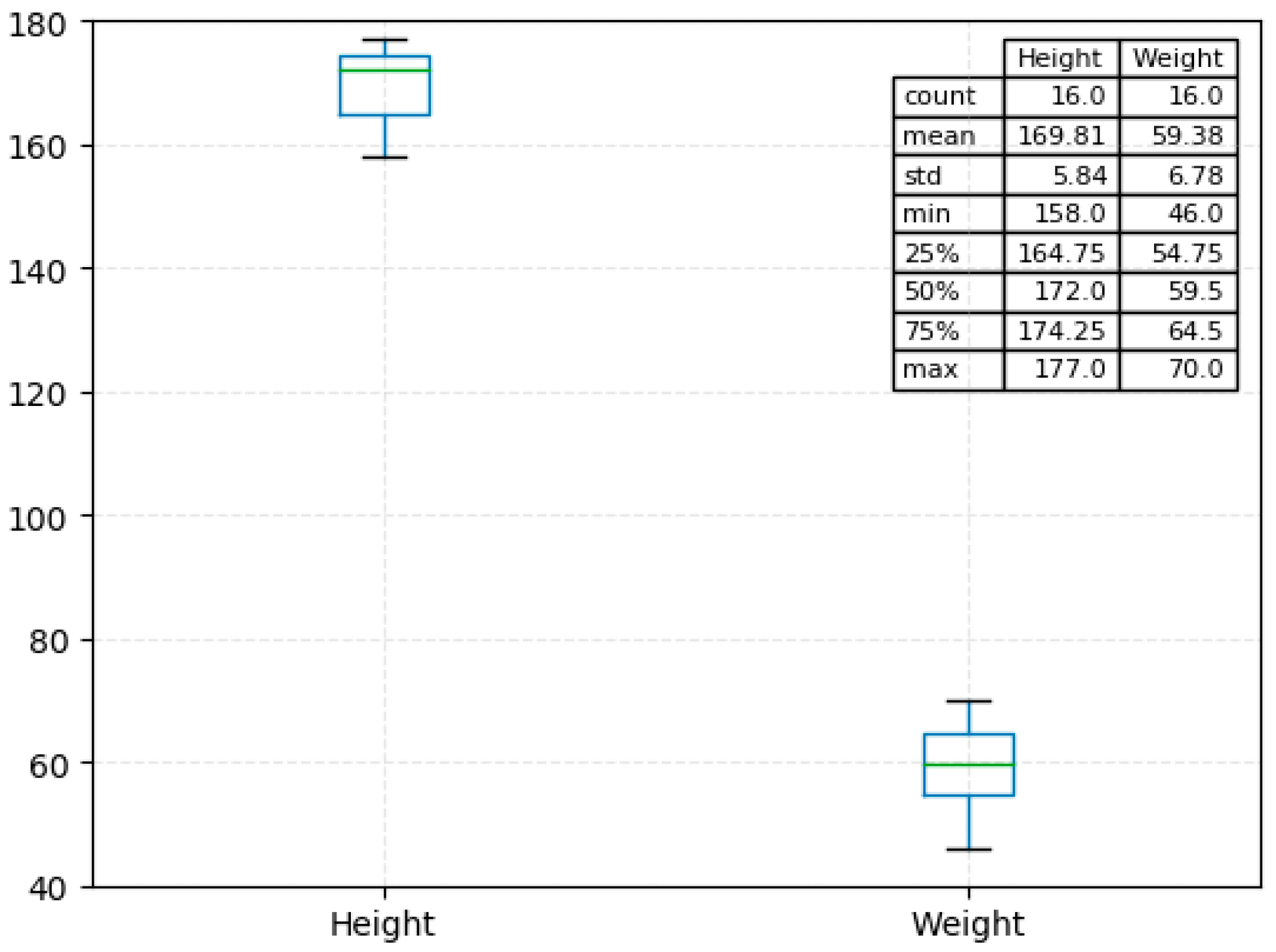
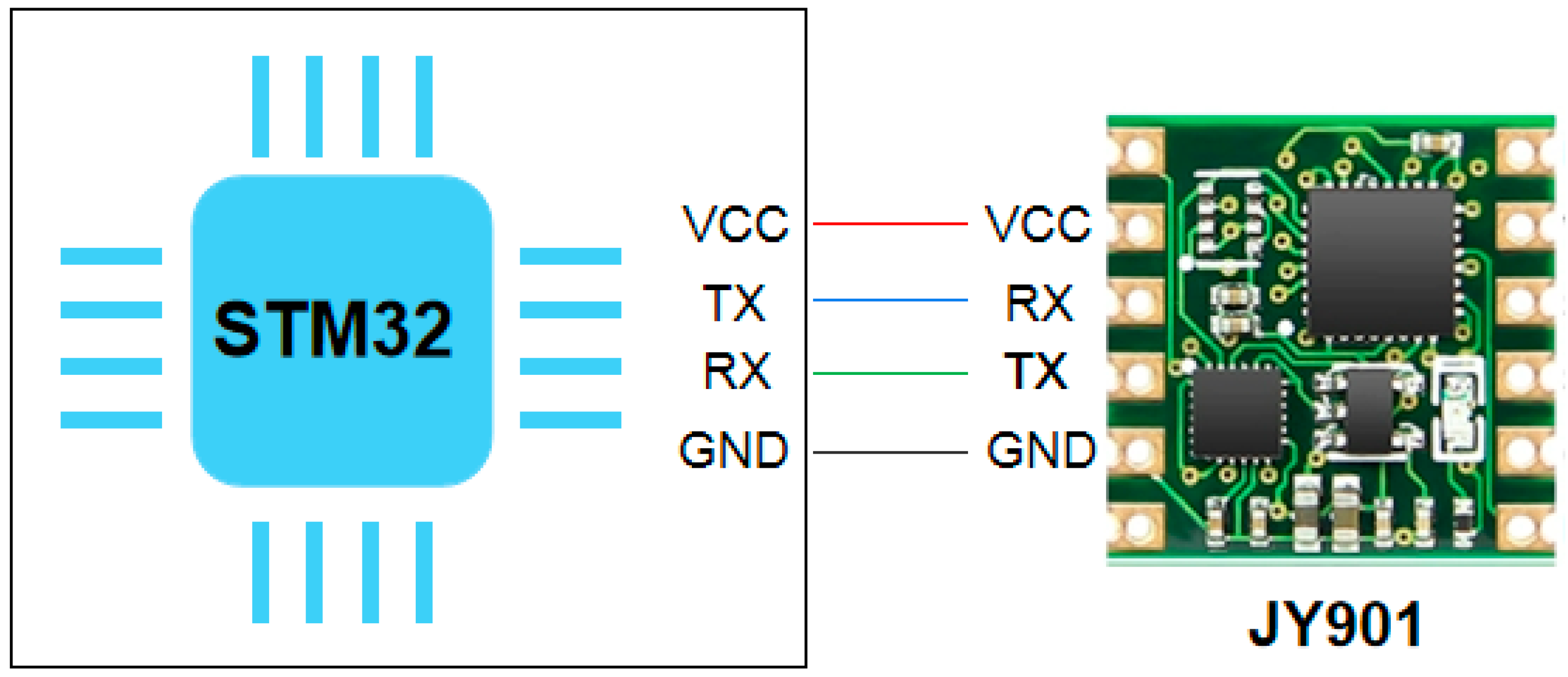
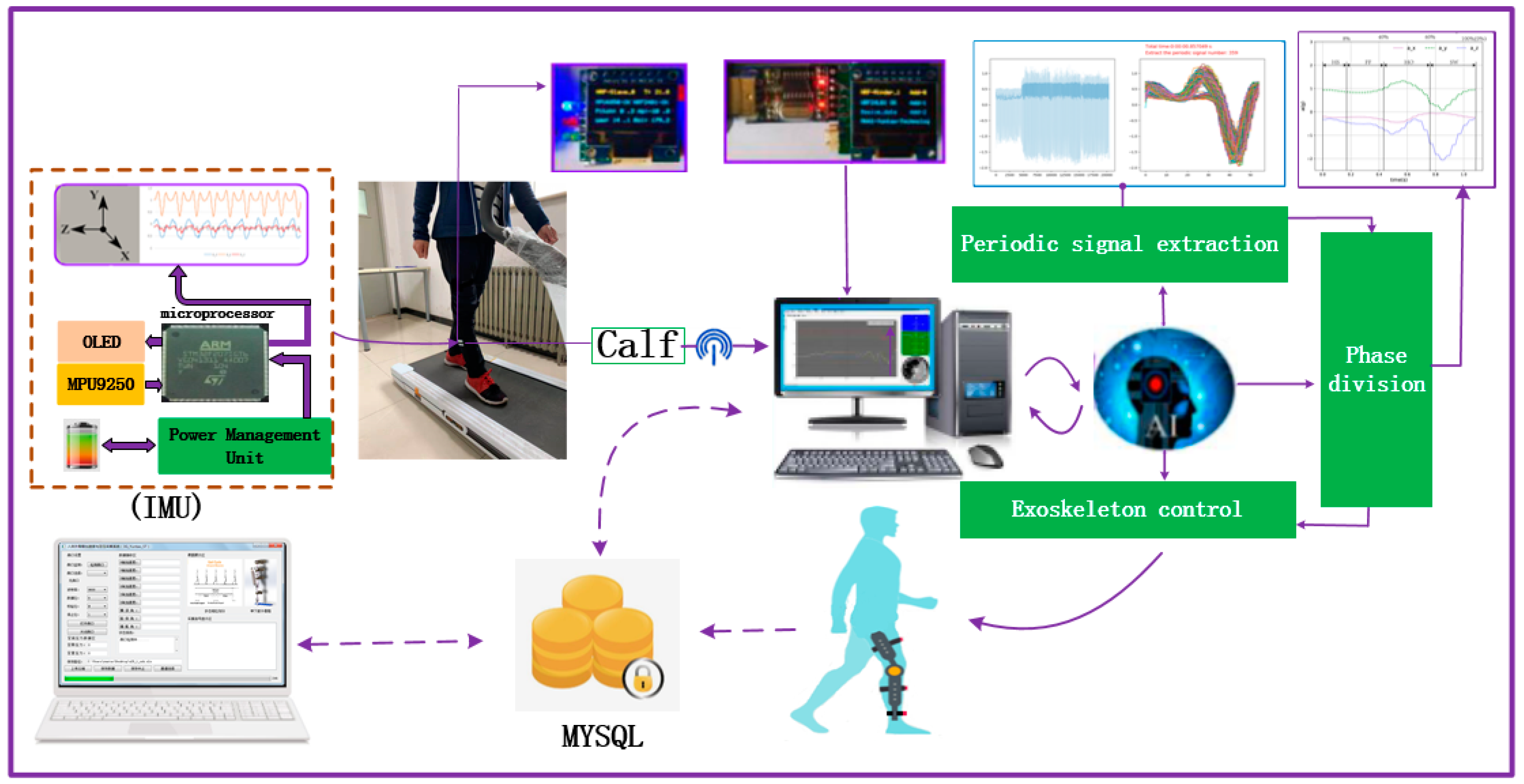
2.1. Data Collection
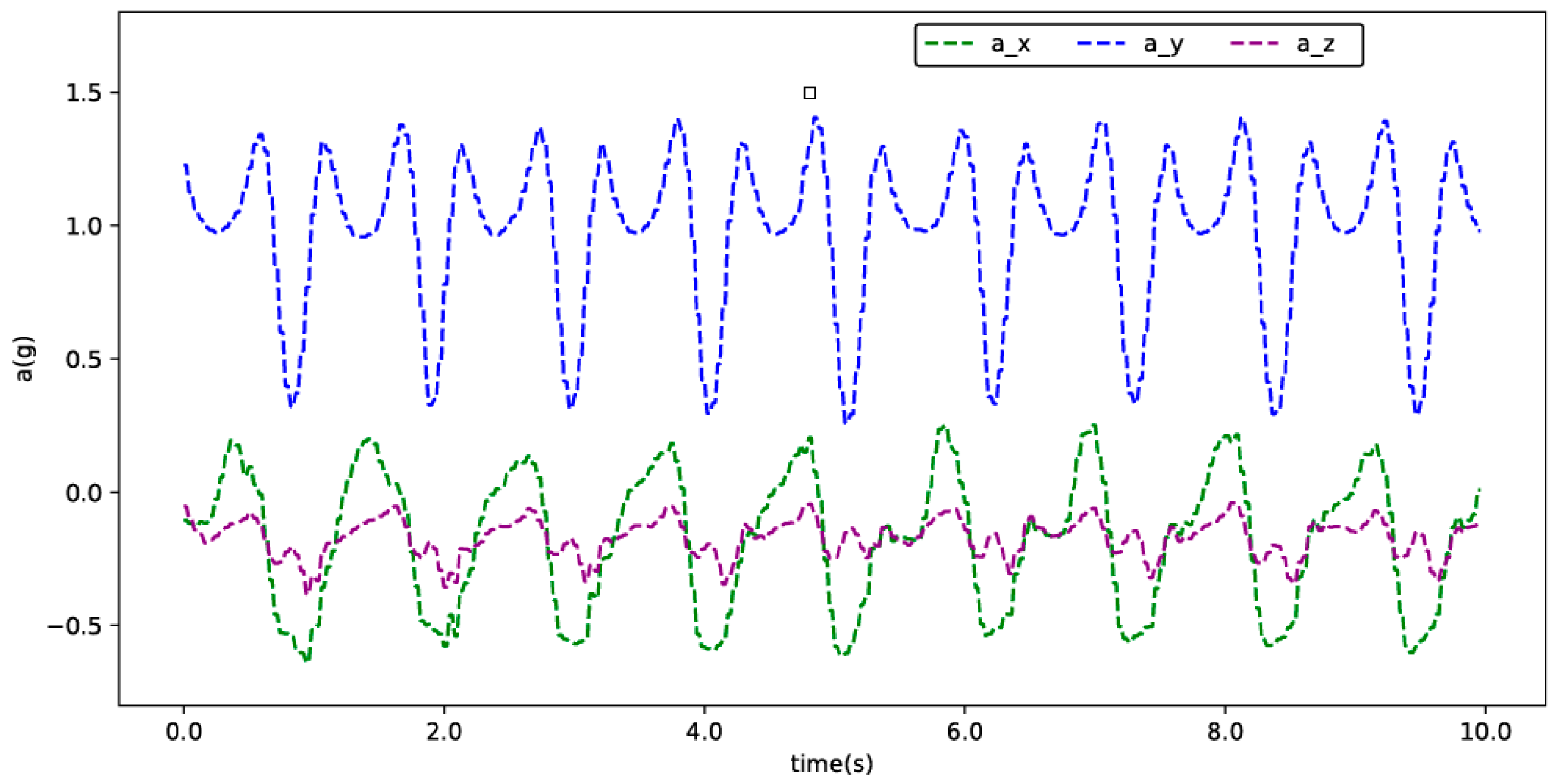
2.2. Data Preprocessing
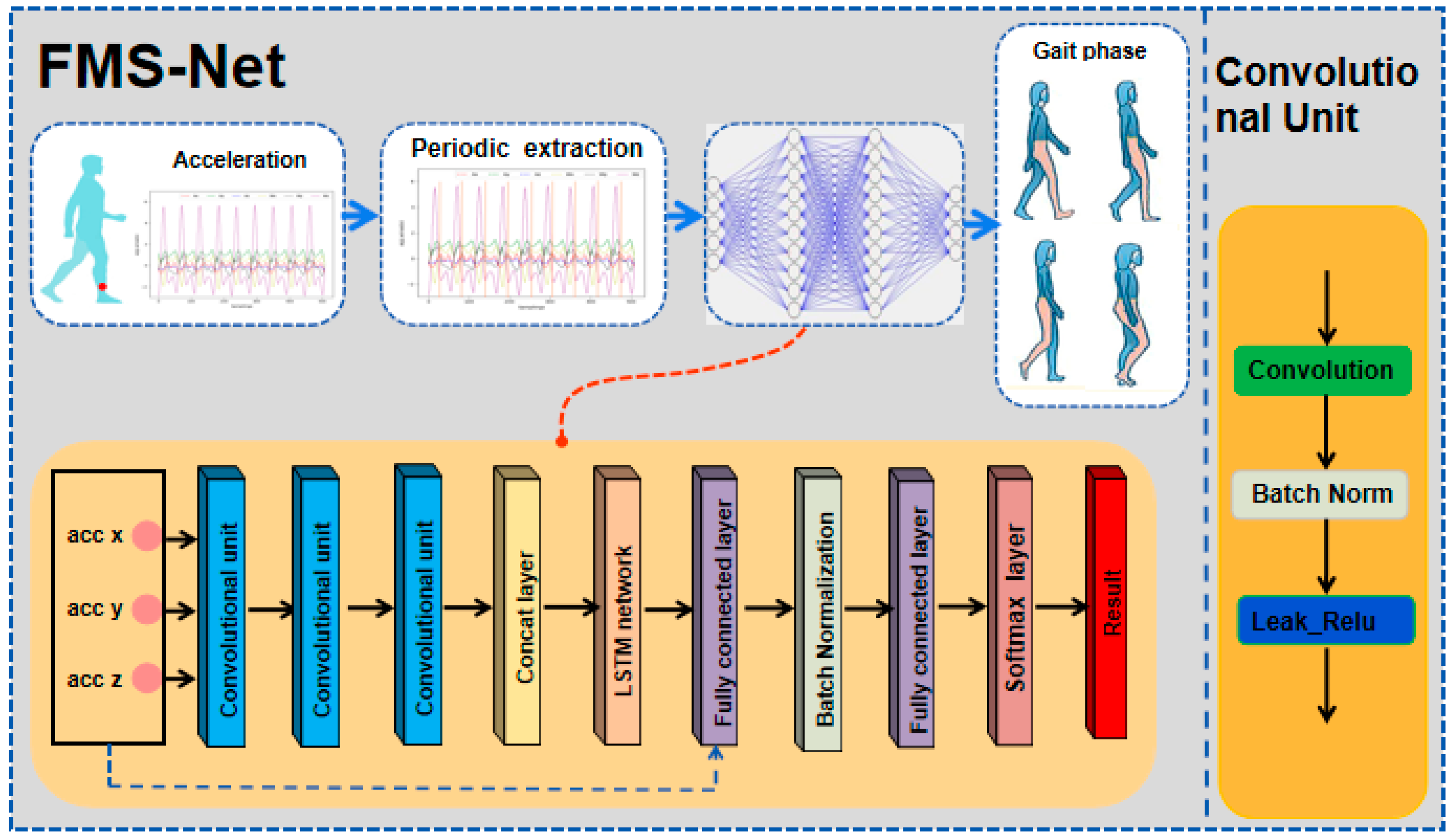
2.3. FMS-Net Neural Network
3. Results and Discussion
3.1. Evaluation Methods
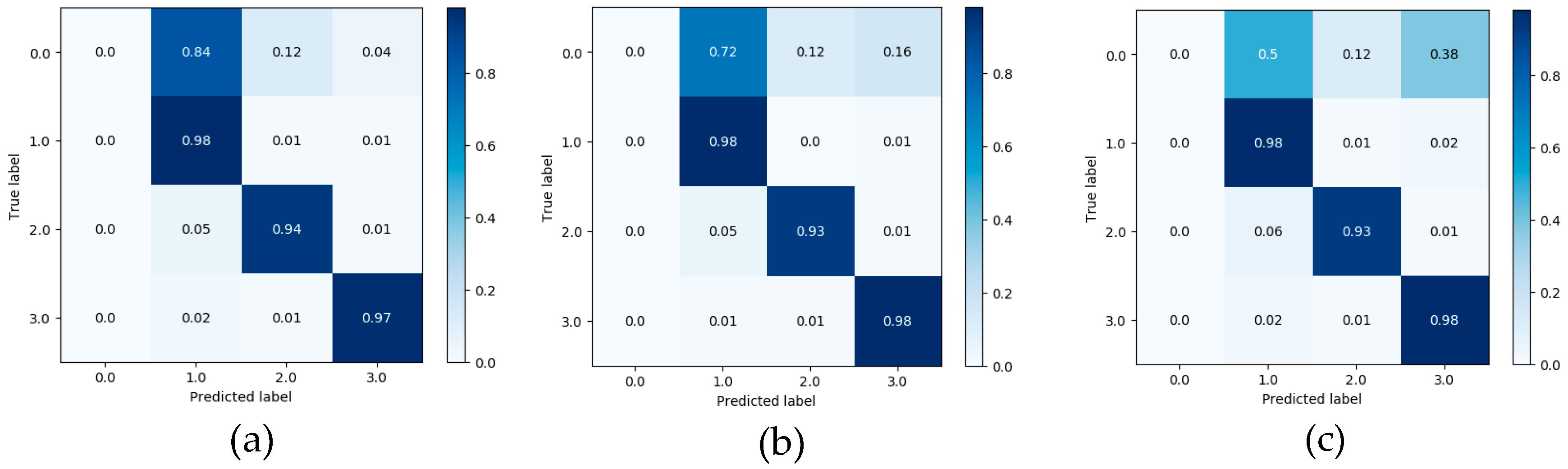
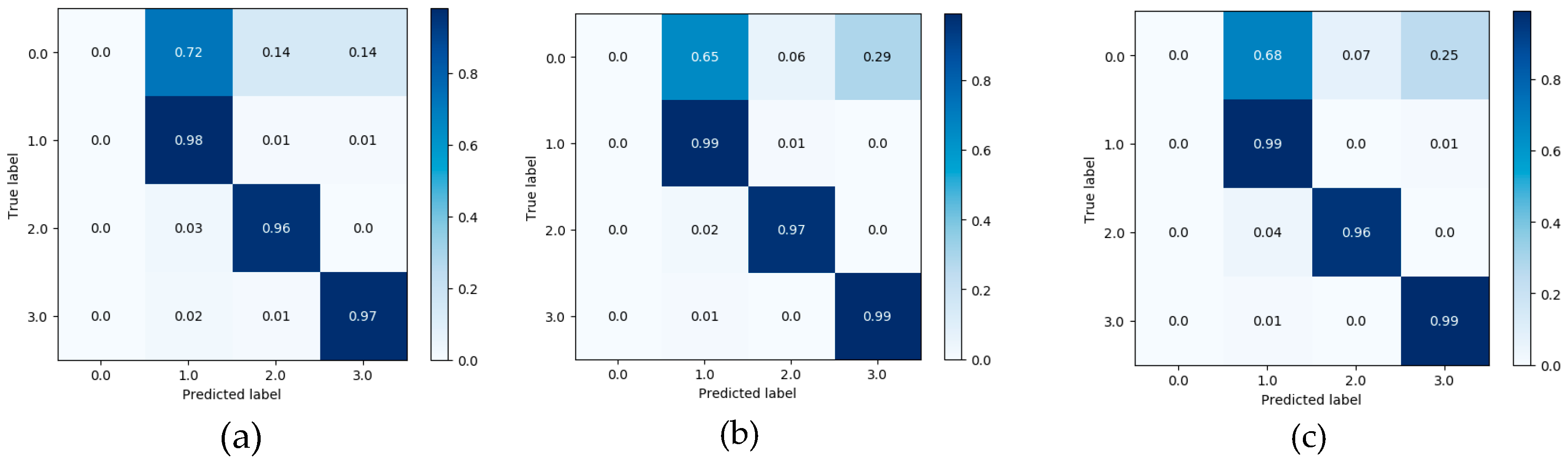
3.2. Results
3.3. Discussion
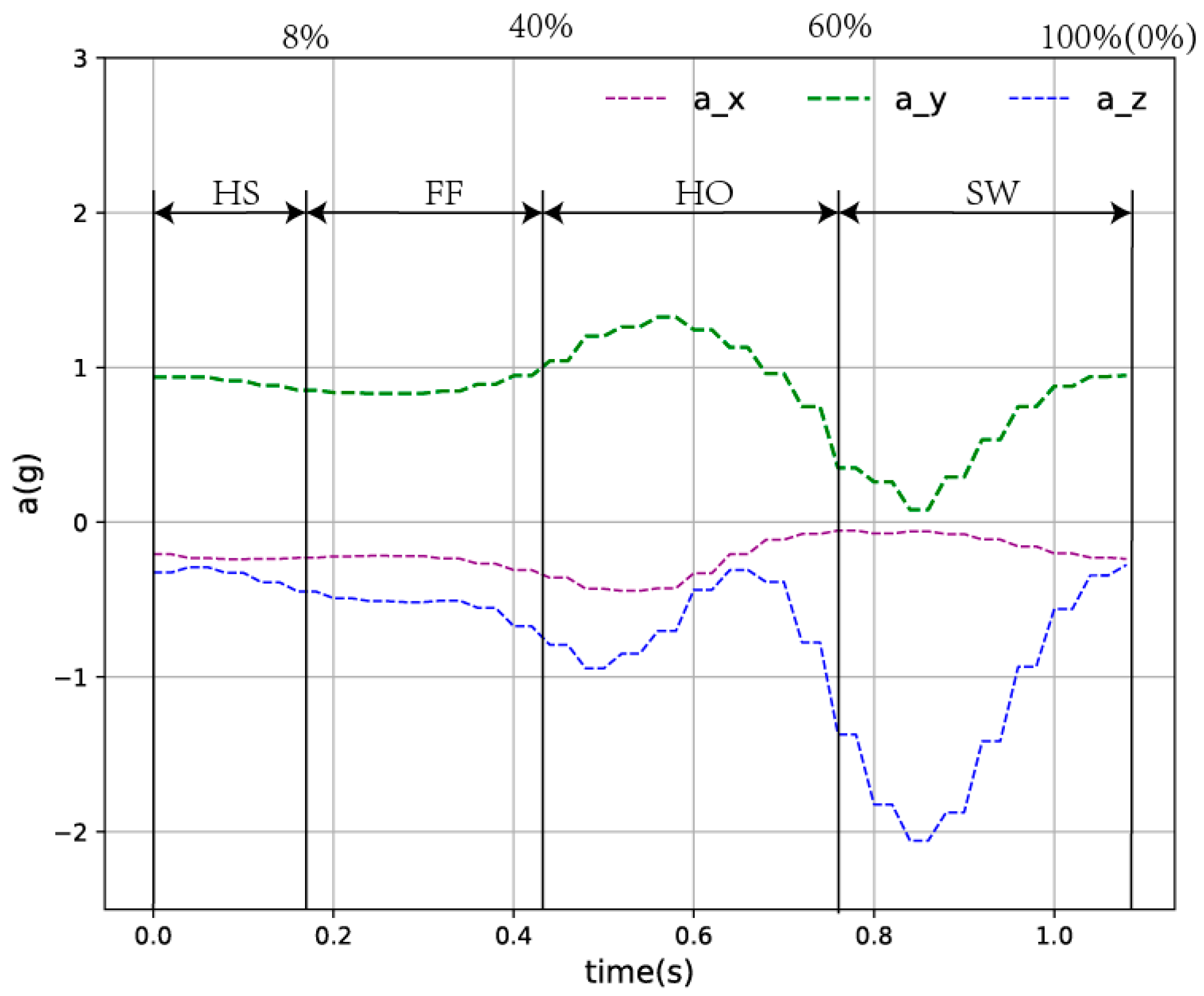
3.3.1. Acceleration System Analysis
3.3.2. Gait Phase Detection
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yan, L.; Zhen, T.; Kong, J.-L.; Wang, L.-M.; Zhou, X.-L. Walking gait phase detection based on acceleration signals using voting-weighted integrated neural network. Complex 2020, 2020, 4760297. [Google Scholar] [CrossRef]
- Rong, L.; Zhiguo, D.; Jianzhong, Z.; Ming, L. Identification of Individual Walking Patterns Using Gait Acceleration. In Proceedings of the 2007 1st International Conference on Bioinformatics and Biomedical Engineering, Wuhan, China, 6–8 July 2007; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2007; pp. 543–546. [Google Scholar]
- Buckley, C.; Micó-Amigo, M.E.; Dunne-Willows, M.; Godfrey, A.; Hickey, A.; Lord, S.; Rochester, L.; Del Din, S.; Moore, S.A. Gait asymmetry post-stroke: Determining valid and reliable methods using a single accelerometer located on the trunk. Sensors 2019, 20, 37. [Google Scholar] [CrossRef] [Green Version]
- Esquenazi, A.; Lee, S.; Packel, A.; Braitman, L. A Randomized comparative study of manually assisted versus robotic-assisted body weight supported treadmill training in persons with a traumatic brain injury. PmR 2012, 5, 280–290. [Google Scholar] [CrossRef]
- Fino, P.C.; Parrington, L.; Pitt, W.; Martini, D.N.; Chesnutt, J.C.; Chou, L.-S.; King, L.A. Detecting gait abnormalities after concussion or mild traumatic brain injury: A systematic review of single-task, dual-task, and complex gait. Gait Posture 2018, 62, 157–166. [Google Scholar] [CrossRef] [PubMed]
- Achanta, S.D.M.; Karthikeyan, T.; Vinothkanna, R. A novel hidden Markov model-based adaptive dynamic time warping (HMDTW) gait analysis for identifying physically challenged persons. Soft Comput. 2019, 23, 8359–8366. [Google Scholar] [CrossRef]
- Vu, H.; Gomez, F.; Cherelle, P.; Lefeber, D.; Nowe, A.; VanderBorght, B. ED-FNN: A new deep learning algorithm to detect percentage of the gait cycle for powered prostheses. Sensors 2018, 18, 2389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, R.; Sun, S.; Zhang, X.; Tang, Z.; Wang, W. A Low-Cost End-to-End sEMG-Based Gait Sub-Phase Recognition System. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 267–276. [Google Scholar] [CrossRef] [PubMed]
- Chattopadhyay, P.; Mukherjee, J.; Sural, S. Information fusion from multiple cameras for gait-based re-identification and recognition. Iet Image Process. 2015, 9, 969–976. [Google Scholar] [CrossRef]
- Ryu, J.-H.; Kim, D. Multiple gait phase recognition using boosted classifiers based on sEMG signal and classification matrix. In Proceedings of the Proceedings of the 8th International Conference on Security of Information and Networks, Xi’an, China, 10–25 October 2014; Association for Computing Machinery (ACM): New York, NY, USA, 2014; pp. 1–4. [Google Scholar]
- Ding, S.; Ouyang, X.; Li, Z.; Yang, H. Proportion-based fuzzy gait phase detection using the smart insole. Sens. Actuators Phys. 2018, 284, 96–102. [Google Scholar] [CrossRef]
- Bejarano, N.C.; Ambrosini, E.; Pedrocchi, A.; Ferrigno, G.; Monticone, M.; Ferrante, S. A novel adaptive, real-time algorithm to detect gait events from wearable sensors. Ieee Trans. Neural Syst. Rehabil. Eng. 2014, 23, 413–422. [Google Scholar] [CrossRef]
- Caldas, R.; Mundt, M.; Potthast, W.; Neto, F.B.L.; Markert, B.; Buarque, F. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait Posture 2017, 57, 204–210. [Google Scholar] [CrossRef] [PubMed]
- Zhen, T.; Yan, L.; Yuan, P. Walking gait phase detection based on acceleration signals using LSTM-DNN Algorithm. Algorithms 2019, 12, 253. [Google Scholar] [CrossRef] [Green Version]
- Manchola, M.D.S.S.; Bernal, M.J.P.P.; Munera, M.; Cifuentes, C.A. Gait phase detection for lower-limb exoskeletons using foot motion data from a single inertial measurement unit in hemiparetic individuals. Sensors 2019, 19, 2988. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gohar, I.; Riaz, Q.; Shahzad, M.; Hashmi, M.Z.U.H.; Tahir, H.; Haq, M.E.U. Person re-identification using deep modeling of temporally correlated inertial motion patterns. Sensors 2020, 20, 949. [Google Scholar] [CrossRef] [Green Version]
- Lu, H.; Plataniotis, K.N.; Venetsanopoulos, A.N. Boosting discriminant learners for gait recognition using MPCA Features. Eurasip J. Image Video Process. 2009, 2009, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Lai, D.T.H.; Khandoker, A.; Begg, R.K.; Palaniswami, M. A hybrid Support Vector Machine and autoregressive model for detecting gait disorders in the elderly. In Proceedings of the 2007 International Joint Conference on Neural Networks, Orlando, FL, USA, 12–17 August 2007; pp. 321–326. [Google Scholar]
- Omid, D.; Mojtaba, T.; Raghvendar, C.V. IMU-based gait recognition using convolutional neural networks and multi-sensor fusion. Sensors 2017, 17, 2735–2744. [Google Scholar]
- Gao, C.; Gehlhar, R.; Ames, A.D.; Liu, S.-C.; Delbruck, T. Recurrent neural network control of a hybrid dynamic transfemoral prosthesis with EdgeDRNN Accelerator. arXiv 2020, arXiv:2002.03197. [Google Scholar]
- Khokhlova, M.; Migniot, C.; Morozov, A.; Sushkova, O.; Dipanda, A. Normal and pathological gait classification LSTM model. Artif. Intell. Med. 2019, 94, 54–66. [Google Scholar] [CrossRef]
- Castro, F.M.; Marin-Jimenez, M.J.; Guil, N.; De La Blanca, N.P.; Rojas, I.; Joya, G.; Catala, A. Automatic learning of gait signatures for people identification. In Proceedings of the International Work-Conference on Artificial and Natural Neural Networks, Cadiz, Spain, 14–16 June 2017; Volume 10306, pp. 257–270. [Google Scholar]
- Zheng, Y.-Y.; Kong, J.-L.; Jin, X.-B.; Wang, X.-Y.; Su, T.-L.; Wang, J.-L. Probability fusion decision framework of multiple deep neural networks for fine-grained visual classification. IEEE Access 2019, 7, 122740–122757. [Google Scholar] [CrossRef]
- Bai, Y.-T.; Jin, X.-B.; Wang, X.-Y.; Xu, J.-P.; Wang, X.-K. Dynamic correlation analysis method of air pollutants in Spatio-Temporal analysis. Int. J. Environ. Res. Public Health 2020, 17, 360. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.B.; Yang, N.X.; Wang, X.Y.; Bai, Y.T.; Su, T.L.; Kong, J.L. Deep hybrid model based on emd with classification by frequency characteristics for long-term air quality prediction. Mathematics 2020, 8, 214. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.B.; Yu, X.H.; Wang, X.Y.; Bai, Y.T.; Su, T.L.; Kong, J.L. Deep learning predictor for sustainable precision agriculture based on internet of things system. Sustainability 2020, 12, 1433. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.-Y.; Kong, J.-L.; Jin, X.-B.; Wang, X.-Y.; Zuo, M.; Su, T.-L. CropDeep: The crop vision dataset for deep-learning-based classification and detection in precision agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.-T.; Wang, X.-Y.; Jin, X.; Zhao, Z.; Zhang, B.-H. A neuron-based kalman filter with nonlinear autoregressive model. Sensors 2020, 20, 299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait partitioning methods: A systematic review. Sensors 2016, 16, 66. [Google Scholar] [CrossRef] [Green Version]
- Rosati, S.; Agostini, V.; Knaflitz, M.; Balestra, G. Muscle activation patterns during gait: A hierarchical clustering analysis. Biomed. Signal Process. Control. 2017, 31, 463–469. [Google Scholar] [CrossRef] [Green Version]
- Mummolo, C.; Mangialardi, L.; Kim, J.H. Quantifying dynamic characteristics of human walking for comprehensive gait cycle. J. Biomech. Eng. 2013, 135, 091006. [Google Scholar] [CrossRef]
- Su, X.; Tong, H.; Ji, P. Activity recognition with smartphone sensors. Tsinghua Sci. Technol. 2014, 19, 235–249. [Google Scholar] [CrossRef]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Valdés, D.S.; Alvarez-Alvarez, A.; Trivino, G. Walking pattern classification using a granular linguistic analysis. Appl. Soft Comput. 2015, 33, 100–113. [Google Scholar] [CrossRef]
- Bartlett, J.; Kram, R. Changing the demand on specific muscle groups affects the walk-run transition speed. J. Exp. Boil. 2008, 211, 1281–1288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kowalski, E.; Catelli, D.S.; Lamontagne, M. Side does not matter in healthy young and older individuals—Examining the importance of how we match limbs during gait studies. Gait Posture 2019, 67, 133–136. [Google Scholar] [CrossRef] [PubMed]
- Lau, H.-Y.; Tong, K.Y.; Zhu, H. Support vector machine for classification of walking conditions of persons after stroke with dropped foot. Hum. Mov. Sci. 2009, 28, 504–514. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Deng, Y.; Meltzner, G. Pace independent mobile gait biometrics. In Proceedings of the 2015 IEEE 7th International Conference on Biometrics Theory, Applications and Systems (BTAS), Arlington, VA, USA, 8–11 September 2015; pp. 1–8. [Google Scholar]
- Zhong, Y.; Deng, Y. Sensor orientation invariant mobile gait biometrics. In Proceedings of the IEEE International Joint Conference on Biometrics, Clearwater, FL, USA, 29 September–2 October 2014; pp. 1–8. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CNN | FC_Layer | |||||
|---|---|---|---|---|---|---|
| Kernel_Size | Activation | Filters | Stride | Feature_Map | Num_Units | Activation |
| 4 × 4 | relu | 20 | 1 | 2 × 2 × 20 | 160 | leaky_relu |
| 1 × 1 | relu | 5 | 1 | 1 × 1 × 5 | 60 | leaky_relu |
| 1 × 1 | relu | 1 | 1 | 1 × 1 × 1 | 4 | leaky_relu |
| Model | Speed | 0.78 m/s | 1.0 m/s | 1.25 m/s | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Phase | HS | FF | HO | SW | HS | FF | HO | SW | HS | FF | HO | SW | |
| LSTM | Precision (%) | 0 | 89.0 | 94.6 | 98.3 | 0 | 90.5 | 95.6 | 97.8 | 0 | 91.8 | 95.2 | 96.4 |
| Recall (%) | 0 | 97.9 | 93.9 | 97.2 | 0 | 98.5 | 93.4 | 97.8 | 0 | 97.6 | 92.9 | 98.0 | |
| F1 (%) | 0 | 93.3 | 94.3 | 97.8 | 0 | 94.3 | 94.5 | 97.8 | 0 | 94.6 | 94.0 | 97.2 | |
| LSTM+CNN | Precision (%) | 0 | 91.3 | 93.8 | 98.5 | 0 | 92.8 | 97.6 | 97.9 | 0 | 91.9 | 97.2 | 98.1 |
| Recall (%) | 0 | 98.2 | 96.3 | 97.4 | 0 | 99.0 | 97.3 | 98.9 | 0 | 99.2 | 95.7 | 98.7 | |
| F1(%) | 0 | 94.6 | 95.1 | 98.0 | 0 | 95.8 | 97.4 | 98.4 | 0 | 95.4 | 96.4 | 98.4 | |
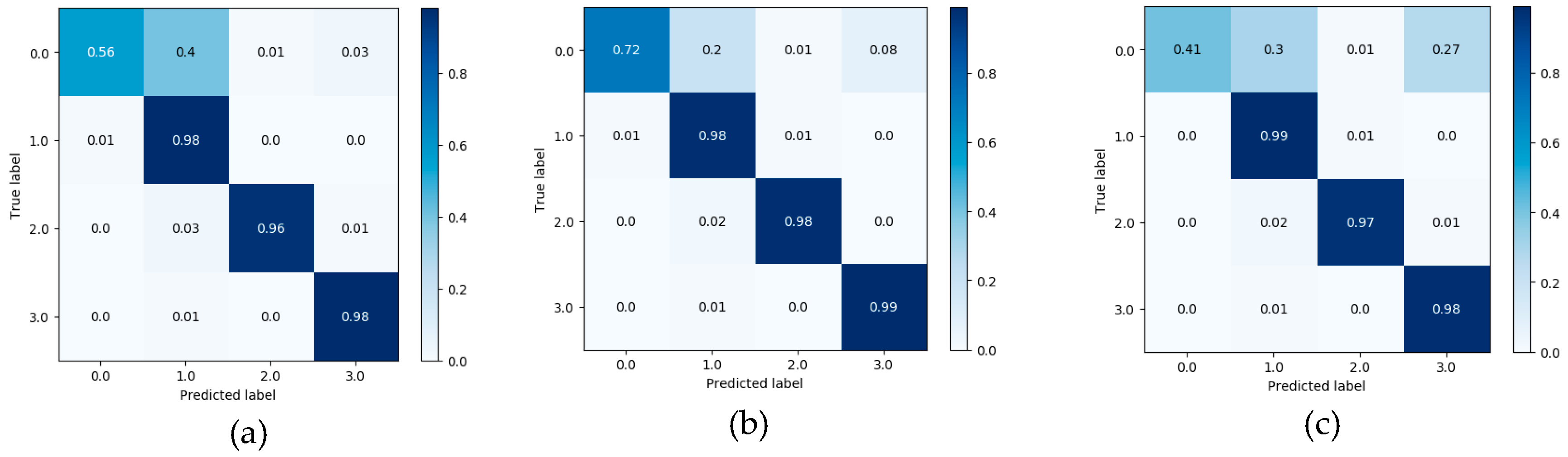
| Precision (%) | 73.8 | 94.5 | 98.2 | 99.2 | 82.3 | 96.8 | 98.5 | 99.1 | 82.9 | 95.6 | 97.4 | 97.8 | |
| FMS-Net | Recall (%) | 56.0 | 98.3 | 97.0 | 98.4 | 71.6 | 98.4 | 97.9 | 98.9 | 41.0 | 98.5 | 97.4 | 98.3 |
| F1 (%) | 63.7 | 96.4 | 97.6 | 98.8 | 76.6 | 97.6 | 98.2 | 99.0 | 54.9 | 97.1 | 97.4 | 98.1 | |
| Pace | Training Function | Classification Rate | ||
|---|---|---|---|---|
| Accuracy (%) | Macro-F1 (%) | Macro-AUC | ||
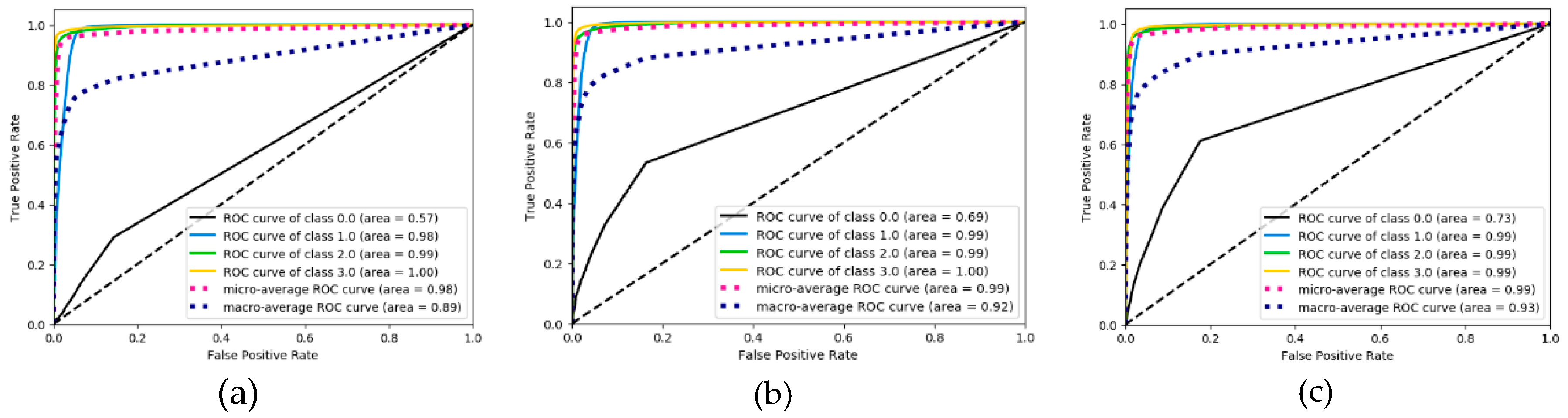
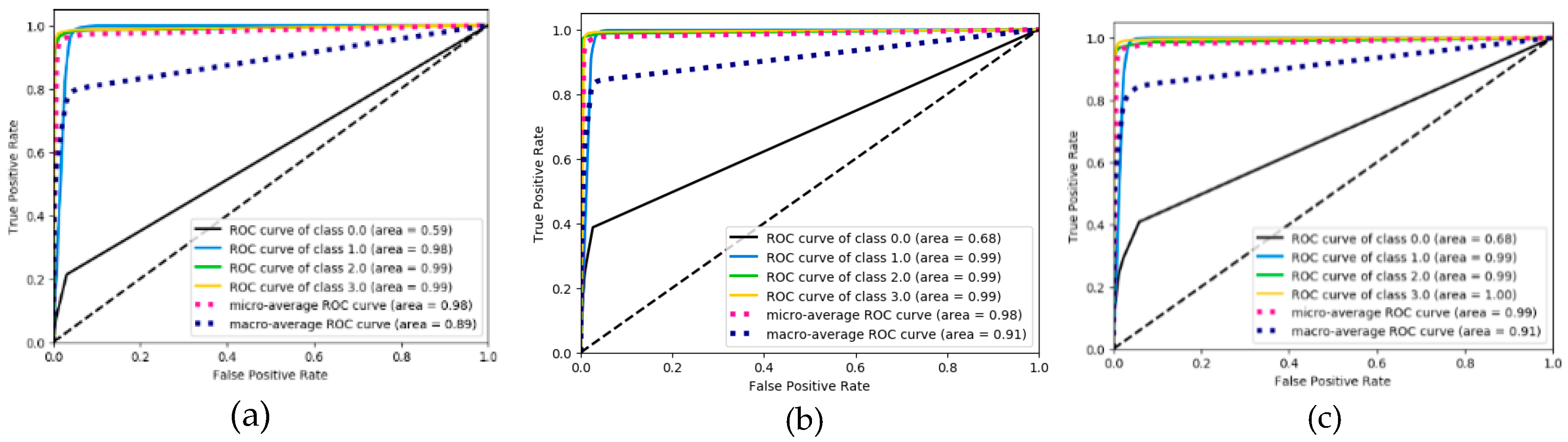
| 0.78 m/s | LSTM | 94.2 | 71.3 | 0.89 |
| LSTM+CNN | 95.1 | 71.9 | 0.89 | |
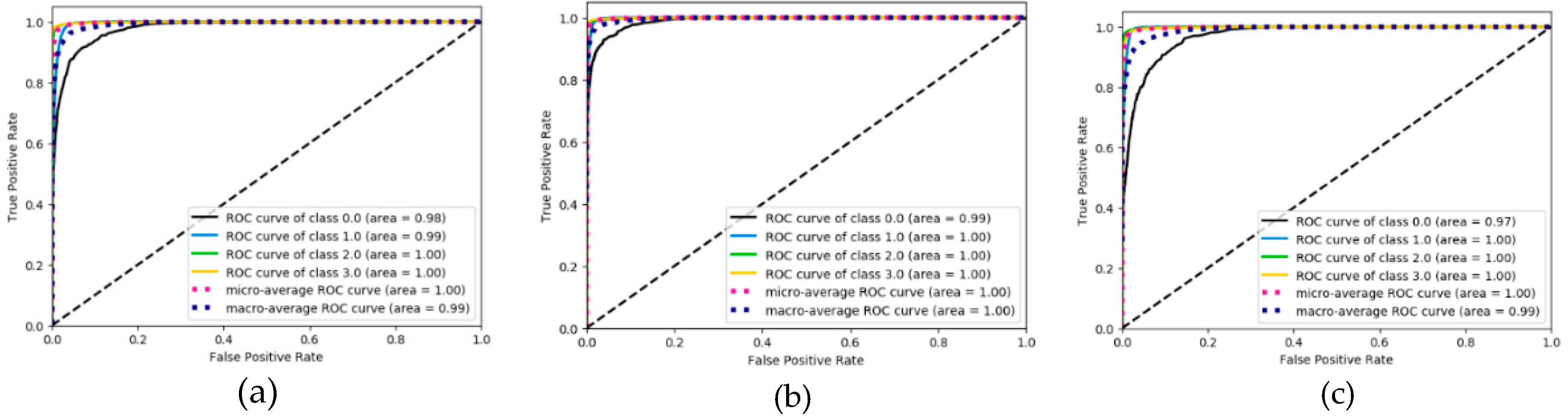
| FMS-Net | 96.7 | 88.9 | 0.99 | |
| NO-skip | 96.5 | 88.0 | 0.99 | |
| 1.0 m/s | LSTM | 94.7 | 71.6 | 0.92 |
| LSTM+CNN | 96.0 | 72.9 | 0.91 | |
| FMS-Net | 97.8 | 92.8 | 1.0 | |
| NO-skip | 97.2 | 91.7 | 0.99 | |
| 1.25 m/s | LSTM | 94.4 | 71.4 | 0.93 |
| LSTM+CNN | 95.7 | 72.5 | 0.91 | |
| FMS-Net | 96.8 | 86.9 | 0.99 | |
| NO-skip | 96.6 | 85.9 | 0.99 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhen, T.; Yan, L.; Kong, J.-l. An Acceleration Based Fusion of Multiple Spatiotemporal Networks for Gait Phase Detection. Int. J. Environ. Res. Public Health 2020, 17, 5633. https://doi.org/10.3390/ijerph17165633
Zhen T, Yan L, Kong J-l. An Acceleration Based Fusion of Multiple Spatiotemporal Networks for Gait Phase Detection. International Journal of Environmental Research and Public Health. 2020; 17(16):5633. https://doi.org/10.3390/ijerph17165633
Chicago/Turabian StyleZhen, Tao, Lei Yan, and Jian-lei Kong. 2020. "An Acceleration Based Fusion of Multiple Spatiotemporal Networks for Gait Phase Detection" International Journal of Environmental Research and Public Health 17, no. 16: 5633. https://doi.org/10.3390/ijerph17165633
APA StyleZhen, T., Yan, L., & Kong, J. -l. (2020). An Acceleration Based Fusion of Multiple Spatiotemporal Networks for Gait Phase Detection. International Journal of Environmental Research and Public Health, 17(16), 5633. https://doi.org/10.3390/ijerph17165633