A Biomechanical Waist Comfort Model for Manual Material Lifting




Abstract
:1. Introduction
2. Materials and Methods
2.1. Waist Force Model
2.1.1. Selection of Waist Force Loading Point
2.1.2. The Relationship between F (Force of Erector Spinae) and G (Gravity of the Moving Object)
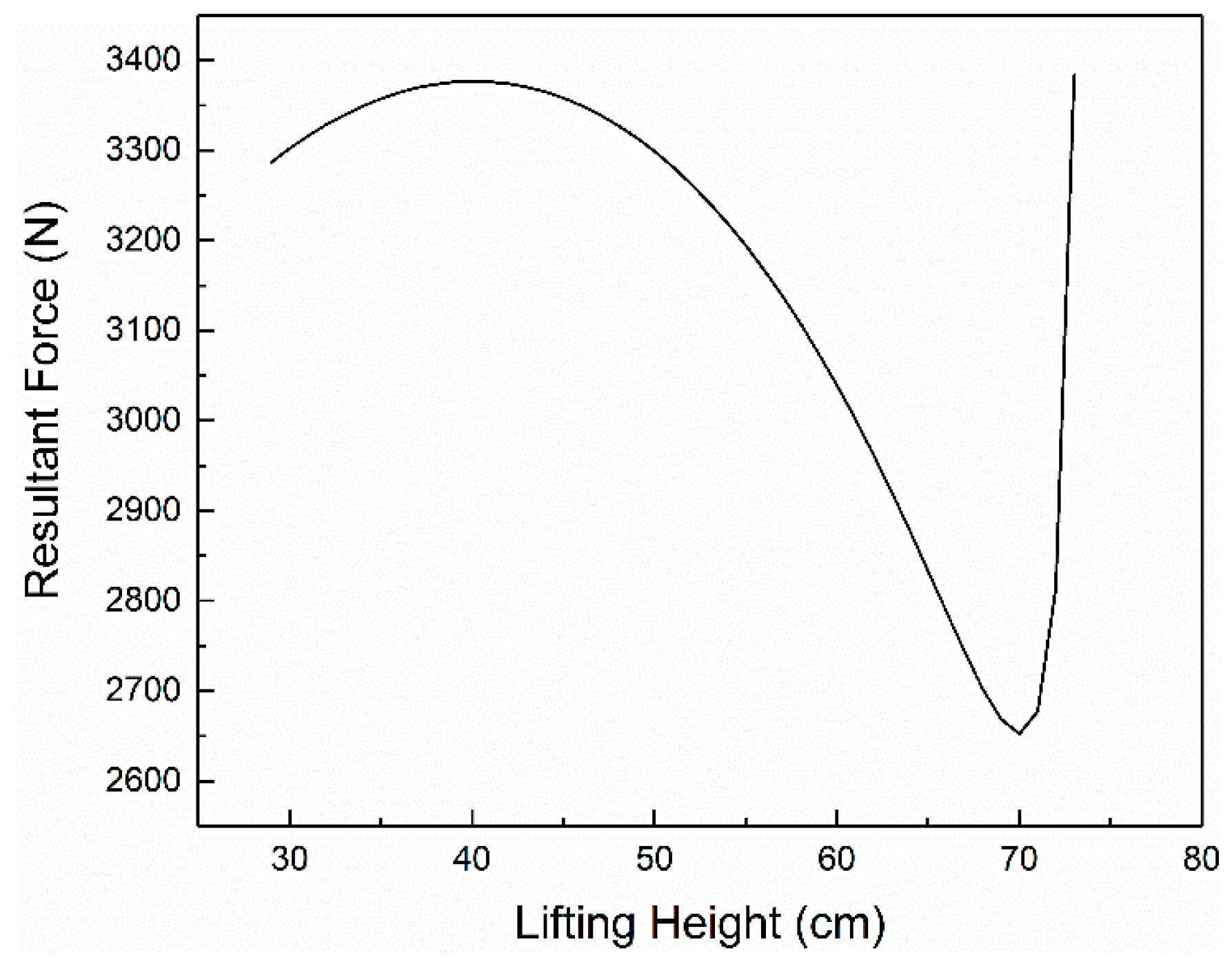
2.1.3. The Relationship between F (Force of Erector Spinae) and h (Height of the Moving Object)
2.1.4. Static Equilibrium Model of the Waist
2.1.5. Parameters Selection
Determine M and H
Determine the Constant a, b
Determine the Proportions j1, j2 and j3 on Body Weight
Determine the Proportionality Coefficient k1, k2, k3
Other Data
2.1.6. Analysis of Static Equilibrium
2.2. Waist Comfort Model
2.2.1. Build Comfort Model Based on the Recommended Weight Limit (RWL) and Lift Index (LI)
2.2.2. Recommended Weight Limit (RWL)
2.2.3. Lifting Index (LI)
2.3. Validation
2.3.1. Parameters Validation
2.3.2. Simulate Manual Lifting via Jack Software
2.3.3. Establish a Human Body Model
2.3.4. Lifting Simulation
3. Results
3.1. The Result of RWL
3.2. The Result of the Relationship Between Comfort Degree and RWL, and LI
3.3. The Result of Parameters Validation
3.4. The Results of Jack Software Simulation
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hartvigsen, J.; Hancock, M.J.; Kongsted, A. What low back pain is and why we need to pay attention. Lancet 2018, 391, 2356–2367. [Google Scholar] [CrossRef] [Green Version]
- Shraim, M.; Cifuentes, M.; Willetts, J.L.; Marucci-Wellman, H.R.; Pransky, G. Length of disability and medical costs in low back pain do state workers’ compensation policies make a difference? J. Occup. Environ. Med. 2015, 57, 1275–1283. [Google Scholar] [PubMed]
- Hoy, D.; March, L.; Brooks, P.; Blyth, F.; Woolf, A.; Bain, C.; Williams, G.; Smith, E.; Vos, T.; Barendregt, J.; et al. The global burden of low back pain: Estimates from the Global Burden of Disease 2010 study. Ann. Rheum. Dis. 2014, 73, 968–974. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, H.-K.; Zhang, Y. Estimation of lumbar spinal loading and trunk muscle forces during asymmetric lifting tasks: Application of whole-body musculoskeletal modelling in OpenSim. Ergonomics 2017, 60, 563–576. [Google Scholar] [CrossRef] [PubMed]
- Maher, C.; Underwood, M.; Buchbinder, R. Non-specific low back pain. Lancet 2017, 389, 736–747. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, S.K.; Byrne, R.M.; Zhou, Y.; Aiyangar, A.; Zhang, X. Lumbar Facet Joint Kinematics and Load Effects During Dynamic Lifting. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2017, 61, 976–980. [Google Scholar] [CrossRef]
- Merryweather, A.S.; Loertscher, M.C.; Bloswick, D.S. A revised back compressive force estimation model for ergonomic evaluation of lifting tasks. Work 2009, 34, 263–272. [Google Scholar] [CrossRef]
- Watanabe, S.; Takahashi, T.; Takeba, J.; Miura, H. Factors associated with the prevalence of back pain and work absence in shipyard workers. BMC Musculoskelet. Disord. 2018, 19, 12. [Google Scholar] [CrossRef] [Green Version]
- Holtermann, A.; Clausen, T.; Aust, B.; Mortensen, O.; Andersen, L. Risk for low back pain from different frequencies, load mass and trunk postures of lifting and carrying among female healthcare workers. Int. Arch. Occup. Environ. Health 2013, 86, 463–470. [Google Scholar] [CrossRef]
- Rosales, I.; Gutiérrez, J.R.L.; Zamora, A.; Salazar, S.; Osorio-Cordero, A.; Aguilar, H.; Lozano, R. Comparison of Control Techniques in a Weight Lifting Exoskeleton. J. Bionic Eng. 2019, 16, 663–673. [Google Scholar] [CrossRef]
- Lamers, E.P.; Yang, A.J.; Zelik, K.E. Feasibility of a Biomechanically-Assistive Garment to Reduce Low Back Loading During Leaning and Lifting. IEEE Trans. Biomed. Eng. 2018, 65, 1674–1680. [Google Scholar] [CrossRef] [PubMed]
- Graham, R.B.; Agnew, M.J.; Stevenson, J.M. Effectiveness of an on-body lifting aid at reducing low back physical demands during an automotive assembly task: Assessment of EMG response and user accetability. Appl. Ergon. 2009, 40, 936–942. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- JR, P. Use of NIOSH equation inputs to calculate lumbosacral compression forces. Ergonomics 1997, 40, 691–707. [Google Scholar] [CrossRef]
- Antwi-Afari, M.F.; Li, H.; Edwards, D.J.; Pärn, E.A.; Owusu-Manu, D.G.; Seo, J.; Wong, A.Y. Identification of potential biomechanical risk factors for low back disorders during repetitive rebar lifting. Constr. Innov. 2018, 18, 206–226. [Google Scholar] [CrossRef]
- Rajaee, M.A.; Arjmand, N.; Shirazi-Adl, A.; Plamondon, A.; Schmidt, H. Comparative evaluation of six quantitative lifting tools to estimate spine loads during static activities. Appl. Ergon. 2015, 48, 22–32. [Google Scholar] [CrossRef] [PubMed]
- Morris, J.M.; Lucas, D.B.; Bresler, B. Role of the Trunk in Stability of the Spine. Journal of Bone and Joint Surgery. Am. Vol. 1961, 43, 327–351. [Google Scholar]
- Chaffin, D.B. A computerized biomechanical model-development of and use in studying gross body actions. J. Biomech. 1969, 2, 429–441. [Google Scholar] [CrossRef] [Green Version]
- Waters, T.R.; Putz-Anderson, V.; Garg, A.; Fine, L.J. Revised NIOSH equation for the design and evaluation of manual lifting tasks. Ergonomics 1993, 36, 749–776. [Google Scholar] [CrossRef]
- Teixeira, E.R.; Okimoto, M.L.R.; Gontijo, L.A. Lifting index of the niosh lifting equation and low back pain. Rev. Produção Online 2011, 11, 735–756. [Google Scholar] [CrossRef] [Green Version]
- Garg, A. Revised NIOSH equation for manual lifting: A method for job evaluation(Short Survey). Aaohn J. 1995, 43, 211–216. [Google Scholar]
- Plamondon, A.; Lariviere, C.; Delisle, A.; Denis, D.; Gagnon, D. Relative importance of expertise, lifting height and weight lifted on posture and lumbar external loading during a transfer task in manual material handling. Ergonomics 2012, 55, 87–102. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.-W.; Shiekhzadeh, A.; Nordin, M. The effect of load weight vs. pace on muscle recruitment during lifting. Appl. Ergon. 2012, 43, 1044–1050. [Google Scholar] [CrossRef] [PubMed]
- Plamondon, A.; Larivie’re, C.; Denis, D.; Mecheri, H.; Nastasia, I. Difference between male and female workers lifting the same relative load when palletizing boxes. Appl. Ergon. 2017, 60, 93–102. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.-J.J.; Garg, A.; Chang, Y.-C.; Shih, Y.-C.; Yeh, W.-Y.; Lee, C.-L. The relationship between low back discomfort ratings and the NIOSH Lifting Index. Hum. Factors 1998, 40, 509–515. [Google Scholar] [CrossRef]
- Christian, M.; Nussbaum, M.A. Responsiveness of selected biomarkers of tissue damage to external load and frequency during repetitive lumbar flexion/extension. Int. J. Ind. Ergon. 2015, 48, 1–9. [Google Scholar] [CrossRef]
- Wu, S.-P. Maximum acceptable weights for asymmetric lifting of Chinese females. Appl. Ergon. 2003, 34, 215. [Google Scholar] [CrossRef]
- Gonçalves, M.; Barbosa, F.S.S. Analysis of strength and resistance parameters of the lumbar spinae erector muscles during isometric exercise at different effort levels. Rev. Bras. Med. Esporte 2005, 11, 109–114. [Google Scholar] [CrossRef]
- NK, M. Pedicular anatomy of the first sacral segment in transitional variations of the lumbo-sacral junction. Spine 2011, 36. [Google Scholar] [CrossRef]
- Arjmand, N.; Shirazi-Adl, A. Biomechanics of changes in lumbar posture in static lifting. Spine 2005, 30, 2637–2648. [Google Scholar] [CrossRef]
- Arjmand, N.; Shirazi-Adl, A.; Bazrgari, B. Wrapping of trunk thoracic extensor muscles influences muscle forces and spinal loads in lifting tasks. Clin. Biomech. 2006, 21, 668–675. [Google Scholar] [CrossRef]
- Luo, Z.; Yu, Y.; Ge, Y. Wearable Stoop-assist Device in Reducing Incidence of Low Back Pain. Chin. J. Med Instrum. 2013, 37, 264–268. (In chinese) [Google Scholar]
- Wang, S.; Park, W.M.; Kim, Y.H.; Cha, T.; Wood, K.; Li, G. In vivo loads in the lumbar L3-4 disc during a weight lifting extension. Clin. Biomech. 2014, 29, 155–160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luger, T.; Mathiassen, S.E.; Bosch, T.; Hoozemans, M.; Douwes, M.; Veeger, D.; Looze, M.D. Influence of Posture Variation on Shoulder Muscle Activity, Heart Rate, and Perceived Exertion in a Repetitive Manual Task. IIse Trans. Occup. Ergon. Hum. Factors 2017, 5, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.-H.; Wu, S.-P.; Hsu, S.-H. The psychophysical lifting capacities of Chinese subjects. Ergonomics 1995, 38, 671–683. [Google Scholar] [CrossRef]
- Xiao, G.-B.; Liang, Y.-X. Psychophysical evaluation of NIOSH Lifting Equation in a Chinese young male population: A pilot study. Chin. J. Ind. Hyg. Occup. Dis. 2008, 26, 341–345. (In chinese) [Google Scholar]
- Zhang, Y.; Wu, X.; Gao, J.; Chen, J.; Xv, X. Simulation and Ergonomic Evaluation of Welders’ Standing Posture Using Jack Software. Int. J. Environ. Res. Public Health 2019, 16, 4354. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.L.; Wu, L.J.; Zheng, R.M.; Wang, J.S.; Ni, W.F. Finite element model testing on Coflex dynamic fixation for L4/5 and L5/S1 segment of lower lumbar. Yiyong Shengwu Lixue/J. Med. Biomech. 2013, 28, 477–483. [Google Scholar]
- Gellhorn, A.; Katz, J.; Suri, P. Osteoarthritis of the spine: The facet joints. Nat. Rev. Rheumatol. 2013, 9, 216–224. [Google Scholar] [CrossRef] [Green Version]
- Cutler, B.; Merritt, T.; Eger, T.; Godwin, A. Using Peak Vicon data to drive Classic JACK animation for the comparison of low back loads experienced during para-rowing. Int. J. Hum. Factors Model. Simul. 2015, 5, 99–112. [Google Scholar] [CrossRef]
- Dreischarf, M.; Shirazi-Adl, A.; Arjmand, N.; Rohlmann, A.; Schmidt, H. Estimation of loads on human lumbar spine: A review of in vivo and computational model studies. J. Biomech. 2016, 49, 833. [Google Scholar] [CrossRef]
- Mehrdad, R.; Shams-Hosseini, N.S.; Aghdaei, S.; Yousefian, M. Prevalence of Low Back Pain in Health Care Workers and Comparison with Other Occupational Categories in Iran: A Systematic Review. Iran. J. Med Sci. 2016, 41, 467–478. [Google Scholar]
- Elfeituri, F.E.; Taboun, S.M. An evaluation of the NIOSH Lifting Equation: A psychophysical and biomechanical investigation. Int. J. Occup. Saf. Ergon. 2002, 8, 243–258. [Google Scholar] [CrossRef] [PubMed]
- Lu, M.-L.; Waters, T.; Werren, D.; Piacitelli, L. Human posture simulation to assess cumulative spinal load due to manual lifting. Part II: Accuracy and precision. Theor. Issues Ergon. Sci. 2011, 12, 189–203. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Somatic Segment Name | Centroid Measurement Starting Point | Centroid Position (Unit: mm) | Centroid Relative Position (unit: %) | Relative Mass (unit: %) |
|---|---|---|---|---|
| Neck | vertex | 117.8 | 46.9 | 8.62 |
| Upper trunk | Cervical vertebra | 115.6 | 53.6 | 16.82 |
| Lower trunk | Lower thoracic point | 177.8 | 40.3 | 27.23 |
| Thigh | Tibial point | 254.5 | 45.3 | 14.19 |
| A lower leg | Medial malleolus point | 224.1 | 39.3 | 3.67 |
| Upper arm | Bony point | 163.3 | 47.8 | 2.43 |
| Forearm | Point of the styloid process of the bone | 136.6 | 42.4 | 1.25 |
| Hand | Fingertip of middle finger | 114.2 | 36.6 | 0.64 |
| Foot | Plantar | 38.2 | 48.6 | 1.48 |
| Whole | Top | 734.2 | 43.8 | - |
| Working Hours | ||||||
|---|---|---|---|---|---|---|
| Frequency F | ≤1 h | ≤2 h | ≤8 h | |||
| (Times/Points) | V < 75 cm | V ≥ 75 cm | V < 75 cm | V ≥ 75 cm | V < 75 cm | V ≥ 75 cm |
| 0.2 | 1.00 | 1.00 | 0.95 | 0.95 | 0.85 | 0.85 |
| 0.5 | 0.97 | 0.97 | 0.92 | 0.92 | 0.81 | 0.81 |
| 1 | 0.94 | 0.94 | 0.88 | 0.88 | 0.75 | 0.75 |
| 2 | 0.91 | 0.91 | 0.84 | 0.84 | 0.66 | 0.66 |
| 3 | 0.88 | 0.88 | 0.79 | 0.79 | 0.55 | 0.55 |
| 4 | 0.84 | 0.84 | 0.72 | 0.72 | 0.45 | 0.45 |
| Center of Gravity away from Ground Height (cm) | Mass of Objects(kg) | L4-L5 Force(N) |
|---|---|---|
| 35 | 14.97 | 3143 |
| 38 | 15.27 | 3120 |
| 41 | 15.61 | 3148 |
| 44 | 15.99 | 3179 |
| 47 | 16.43 | 3213 |
| 50 | 16.94 | 3218 |
| 53 | 17.56 | 3226 |
| 56 | 18.34 | 3235 |
| 59 | 19.37 | 3247 |
| 62 | 20.86 | 3268 |
| 65 | 23.26 | 3308 |
| 68 | 27.92 | 3388 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Ke, J.; Wu, X.; Luo, X. A Biomechanical Waist Comfort Model for Manual Material Lifting. Int. J. Environ. Res. Public Health 2020, 17, 5948. https://doi.org/10.3390/ijerph17165948
Zhang Y, Ke J, Wu X, Luo X. A Biomechanical Waist Comfort Model for Manual Material Lifting. International Journal of Environmental Research and Public Health. 2020; 17(16):5948. https://doi.org/10.3390/ijerph17165948
Chicago/Turabian StyleZhang, Yongbao, Jinjing Ke, Xiang Wu, and Xiaowei Luo. 2020. "A Biomechanical Waist Comfort Model for Manual Material Lifting" International Journal of Environmental Research and Public Health 17, no. 16: 5948. https://doi.org/10.3390/ijerph17165948
APA StyleZhang, Y., Ke, J., Wu, X., & Luo, X. (2020). A Biomechanical Waist Comfort Model for Manual Material Lifting. International Journal of Environmental Research and Public Health, 17(16), 5948. https://doi.org/10.3390/ijerph17165948