A Vision-Based Approach for Sidewalk and Walkway Trip Hazards Assessment



Abstract
:1. Introduction
2. Literature Review
2.1. Pavement and Crack Analysis
2.2. Comparison of Available Depth Measurement Techniques and Devices
2.3. Current Calibration Techniques for Depth Cameras
2.4. Region Growing and Edge Detection
3. Materials and Methods
3.1. Error Elimination Algorithms
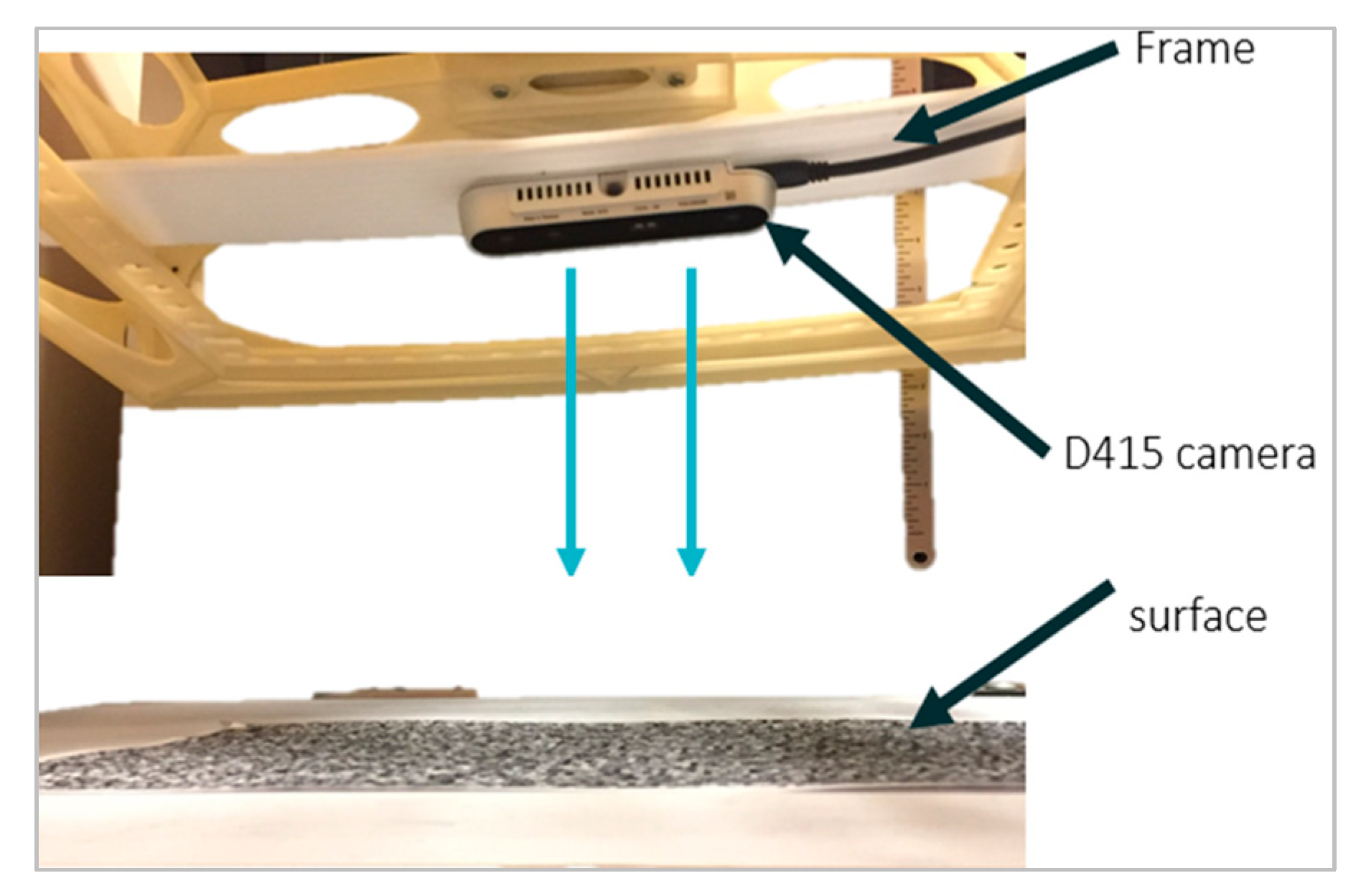
3.1.1. Data Collection
- Resolution: Three resolution options were tested for all trials at different heights. The resolutions were high (1280 × 640), medium (640 × 320), and low (424 × 240).
- Distance from the objects: The heights ranged from 130 to 290 mm. Each height at each resolution was recorded three times, and the mean value is used as a feature.
- Light: The data were collected in both indoor and outdoor environments with lights on/off and with sunlight and shade. The order that the data was captured for the light trials was alternated.
- Temperature: The temperature of the RealSense device gradually increases as the device is in use and tends to increase more when the laser projector is enabled. Generally, it takes about 10–15 minutes for the device to reach a steady-state temperature when the laser is not enabled. With the room temperature of 22 °C, the steady-state temperature is in the range of 38–42 °C. Two temperature tests were conducted on the device. In the first experiment, the device was continuously operating in room temperature until it reached a steady state. The device operating temperature and the distance measurements were performed continuously (about every 20 s) as it heated up. In the second experiment, the device was heated up to 60 °C and cooled down to 20 °C by using a heat gun and cooler. The data was also captured continuously every 20 s.
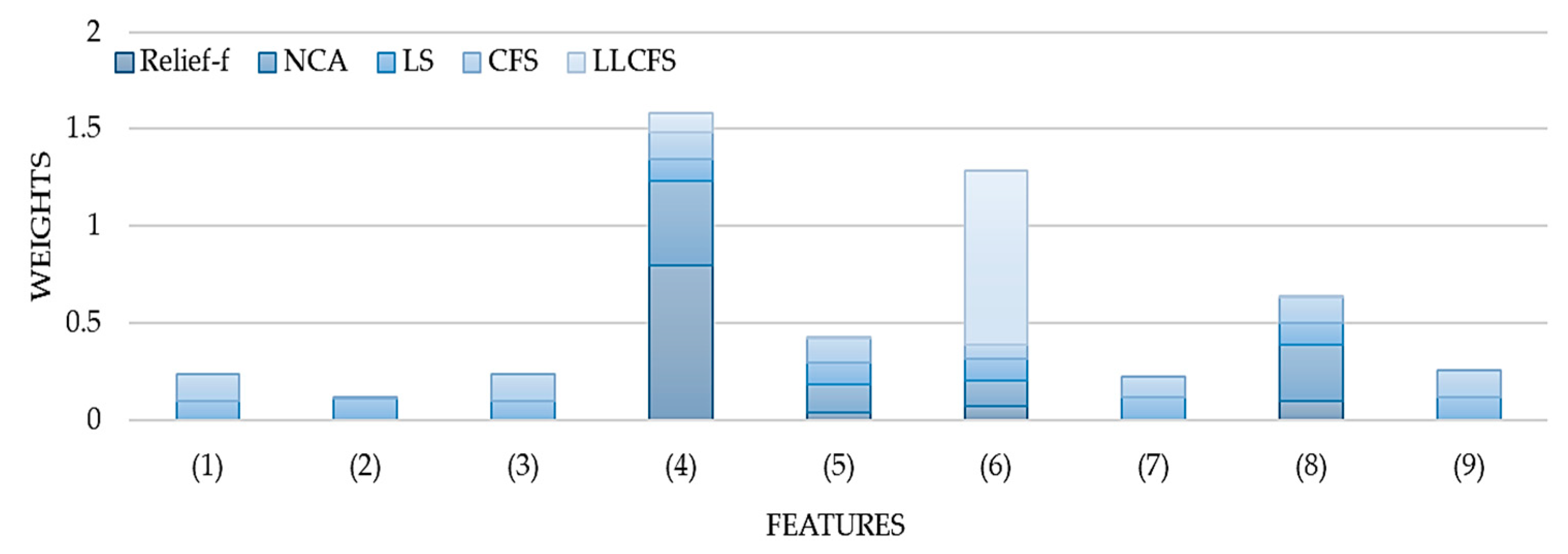
3.1.2. Proposed Error Prediction Models
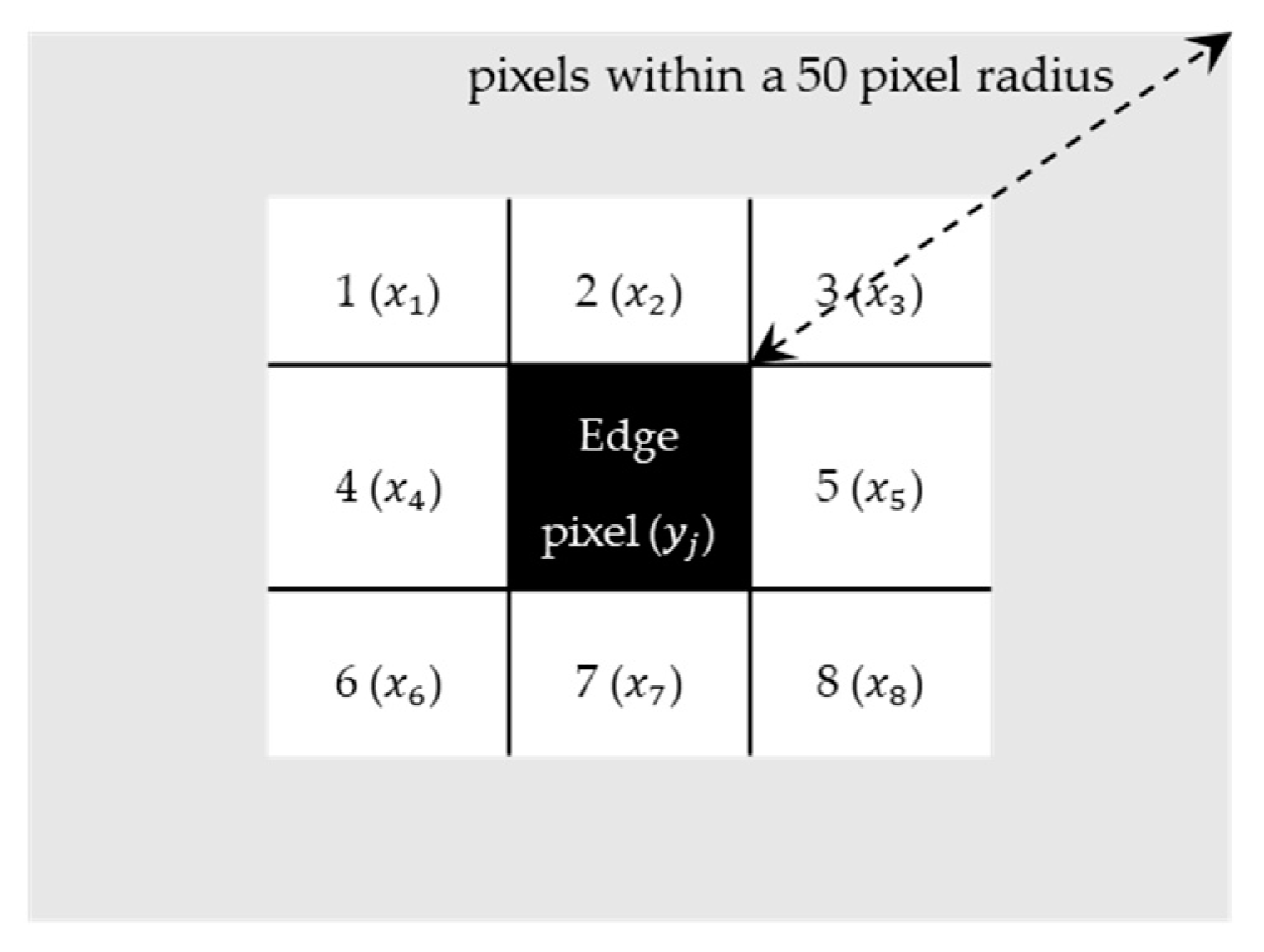
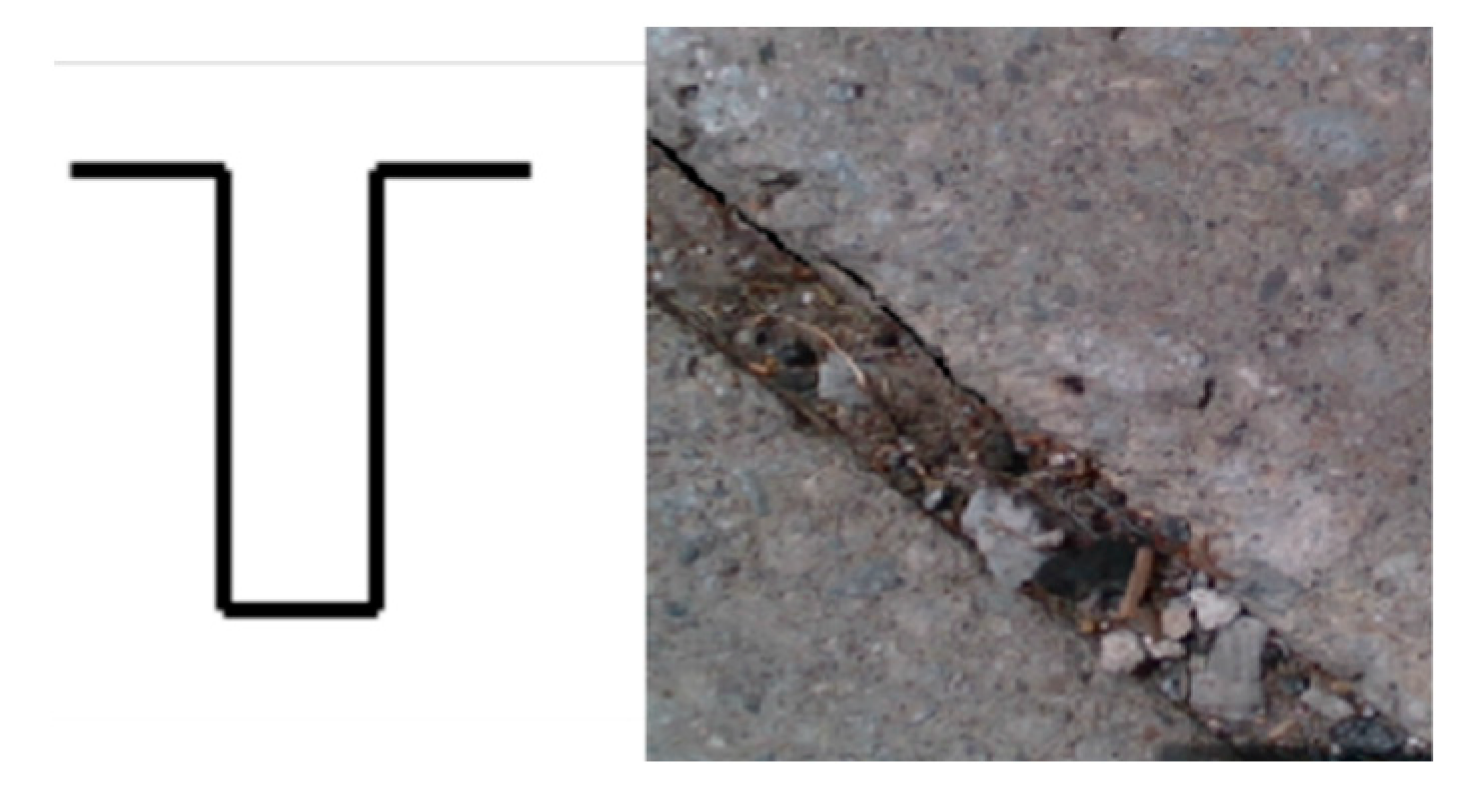
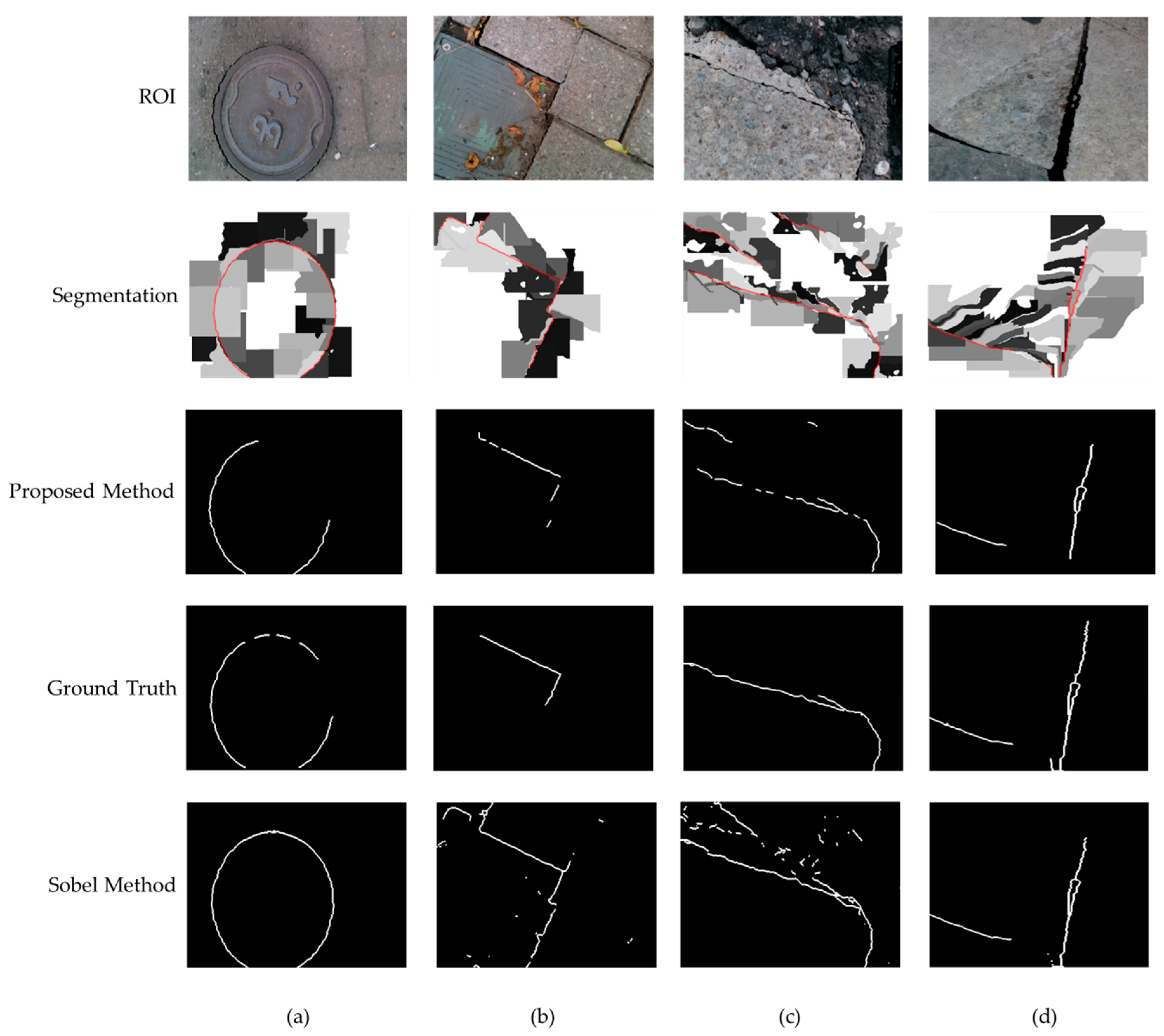
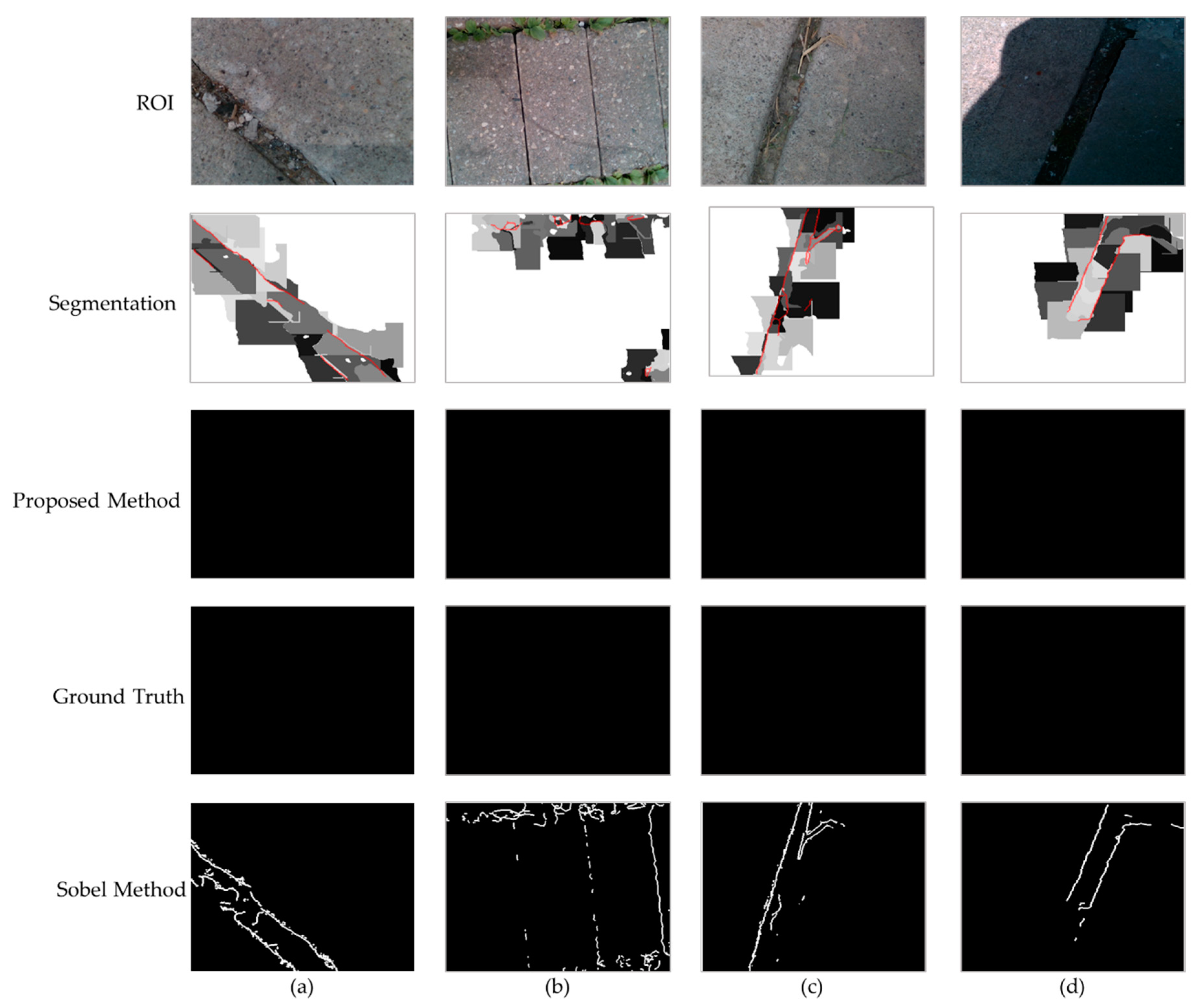
3.2. Crack Detection Algorithm
4. Results and Discussion
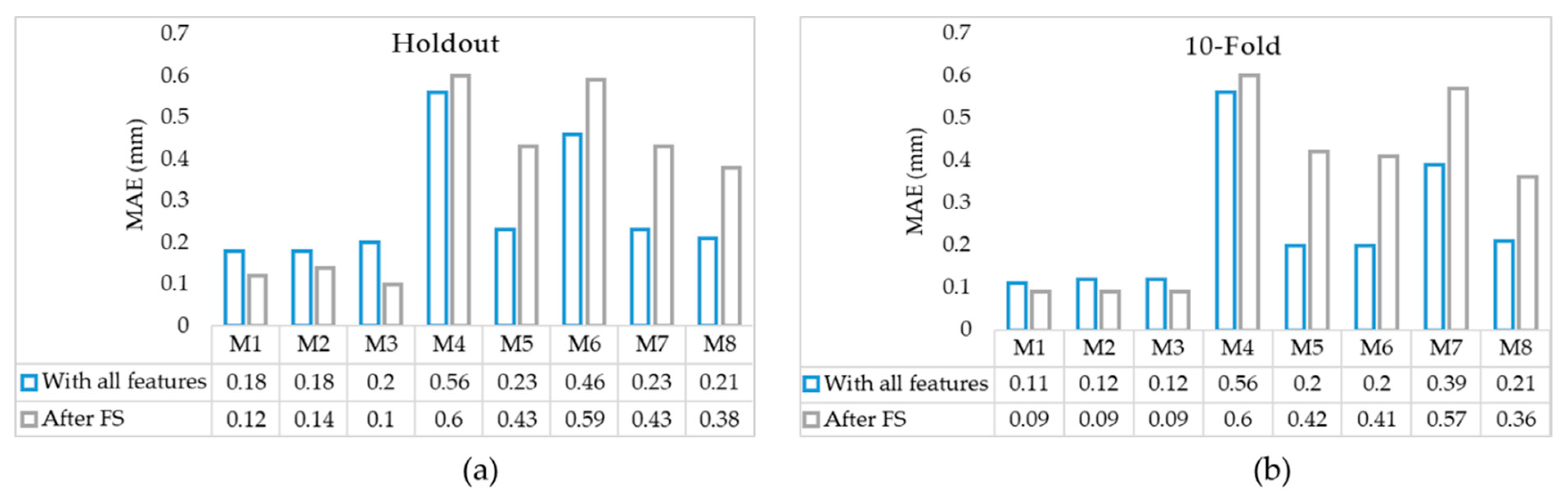
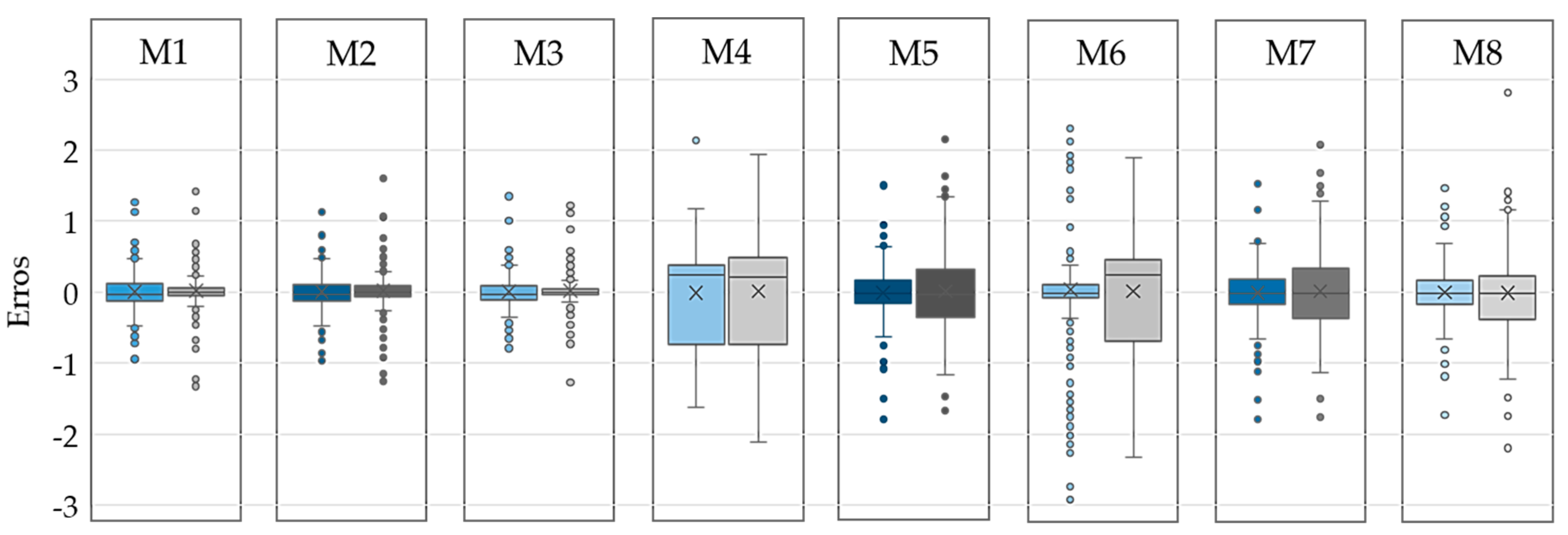
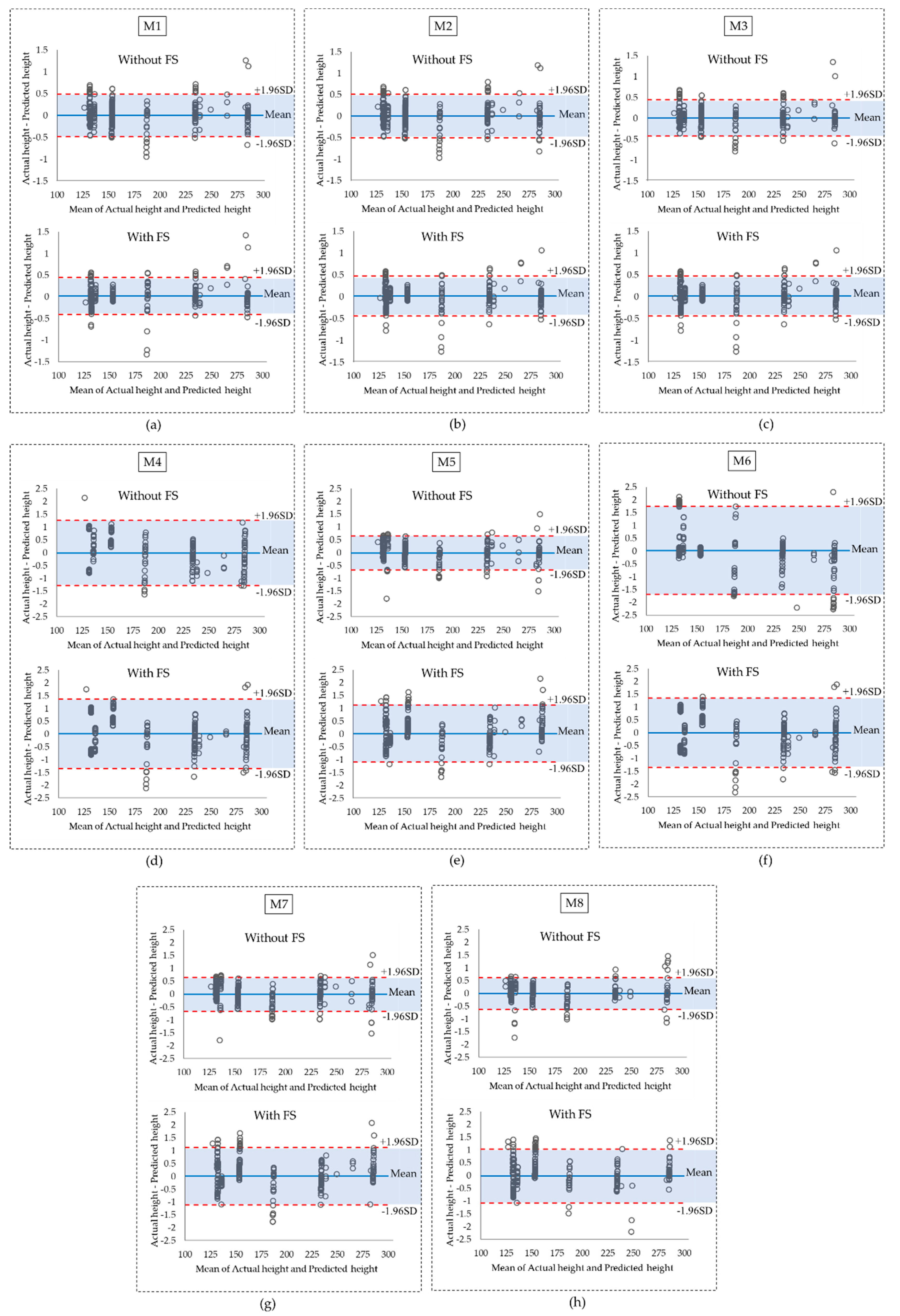
4.1. Error Prediction Results
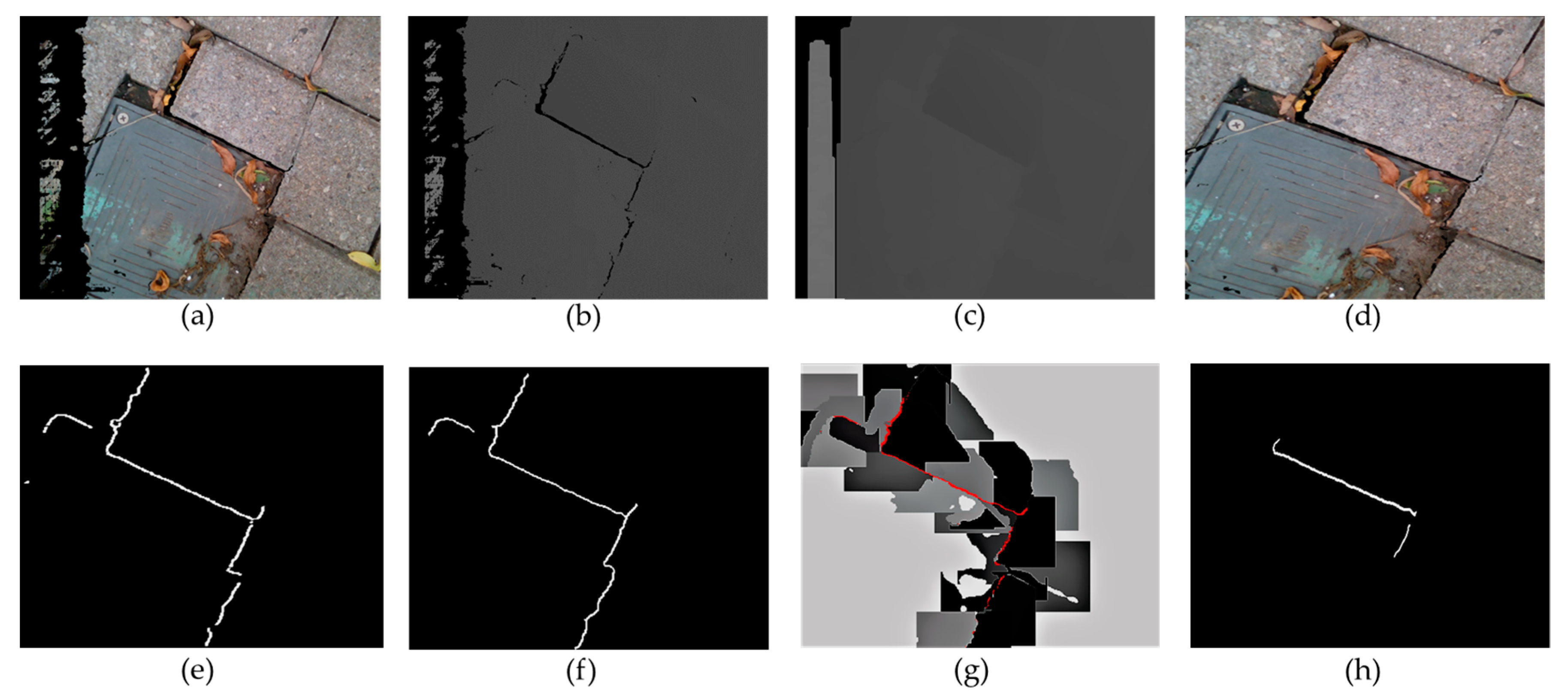
4.2. Visual Output of the Proposed Crack Detection Algorithm
Author Contributions
Funding
Conflicts of Interest
References
- Minimum Maintenance Standards. Minimum Maintenance Standards for Municipal Highways Policy; Minimum Maintenance Standards Municipal Act: Ontario, Canada, 2014. [Google Scholar]
- International Code Council (ICC). Chapter 10 Means of Egress. In International Building Code; ICC: Falls Church, VA, USA, 2014. [Google Scholar]
- Fekr, A.R.; Evans, G.; Fernie, G. Walkway Safety Evaluation and Hazards Investigation for Trips and Stumbles Prevention. In Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018); Bagnara, S., Tartaglia, R., Albolino, S., Alexander, T., Fujita, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 807–815. [Google Scholar]
- Green, J. 89-Year-Old Wins $192K in Court after Tripping on Cracked Hamilton Sidewalk CBC News. 2015. Available online: https://www.cbc.ca/news/canada/hamilton/headlines/89-year-old-wins-192k-settlement-after-tripping-on-cracked-hamilton-sidewalk-1.3108350 (accessed on 11 November 2020).
- Ai, C.; James Tsai, Y. An Automated Sidewalk Assessment Method for the Americans with Disabilities Act Compliance Using 3-D Mobile LiDAR. Transp. Res. Rec. J. Transp. Res. Board 2016, 2542. [Google Scholar] [CrossRef]
- McMahon, S.; Sünderhauf, N.; Upcroft, B.; Milford, M. Multimodal Trip Hazard Affordance Detection on Construction Sites. IEEE Robot. Autom. Lett. 2017, 3, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Bitelli, G.; Simone, A.; Girardi, F.; Lantieri, C. Laser Scanning on Road Pavements: A New Approach for Characterizing Surface Texture. Sensors 2012, 12, 9110–9128. [Google Scholar] [CrossRef] [PubMed]
- Annovi, A.; Fechney, R.; Yenkanchi, S.; Lowe, D.; Shah, H.; Sivakumar, P.K.; Singh, I.P.; Galchinsky, M. High Speed Stereoscopic Pavement Surface Scanning System and Method. U.S. Patent 10190269B2, 29 January 2019. [Google Scholar]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Tanaka, N.; Uematsu, K. A Crack Detection Method in Road Surface Images Using Morphology. In Proceedings of the MVA 1998, Chiba, Japan, 17–19 November 1998. [Google Scholar]
- Xu, B.; Huang, Y. Automated Surface Distress Measurement System. U.S. Patent 7697727B2, 13 April 2010. [Google Scholar]
- Zhang, D.; Li, Q.; Chen, Y.; Cao, M.; He, L.; Zhang, B. An efficient and reliable coarse-to-fine approach for asphalt pavement crack detection. Image Vis. Comput. 2017, 57, 130–146. [Google Scholar] [CrossRef]
- Oliveira, H.; Correia, P.L. Automatic Road Crack Detection and Characterization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 155–168. [Google Scholar] [CrossRef]
- Ferguson, R.A.; Pratt, D.N.; Turtle, P.R.; MacIntyre, I.B.; Moore, D.P.; Kearney, P.D.; Best, M.J.; Gardner, J.L.; Berman, M.; Buckley, M.J.; et al. Road Pavement Deterioration Inspection System. U.S. Patent 6615648B1, 9 September 2003. [Google Scholar]
- Jia, Y.; Tang, L.; Xu, B.; Zhang, S. Crack Detection in Concrete Parts Using Vibrothermography. J. Nondestruct. Eval. 2019, 38, 21. [Google Scholar] [CrossRef]
- Fujita, Y.; Hamamoto, Y. A robust automatic crack detection method from noisy concrete surfaces. Mach. Vis. Appl. 2011, 22, 245–254. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Hashimoto, S. Fast crack detection method for large-size concrete surface images using percolation-based image processing. Mach. Vis. Appl. 2010, 21, 797–809. [Google Scholar] [CrossRef]
- Efficient Pavement Crack Detection and Classification. SpringerLink. Available online: https://link.springer.com/article/10.1186/s13640-017-0187-0 (accessed on 24 June 2020).
- Qu, Z.; Ju, F.-R.; Guo, Y.; Bai, L.; Chen, K. Concrete surface crack detection with the improved pre-extraction and the second percolation processing methods. PLoS ONE 2018, 13, e0201109. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Yang, F.; Zhang, Y.D.; Zhu, Y.J. Road crack detection using deep convolutional neural network. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3708–3712. [Google Scholar]
- Bertuletti, S.; Cereatti, A.; Comotti, D.; Caldara, M.; Della Croce, U. Static and Dynamic Accuracy of an Innovative Miniaturized Wearable Platform for Short Range Distance Measurements for Human Movement Applications. Sensors 2017, 17, 1492. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Glenn, N.F.; Streutker, D.J.; Chadwick, G.D.; Thackray, G.D.; Dorsch, S.J. Analysis of LiDAR-derived topographic information for characterizing and differentiating landslide morphology and activity. Geomorphology 2006, 73, 131–148. [Google Scholar] [CrossRef]
- Lohani, B. Airborne Altimetric LiDAR: Principle, Data Collection, Processing and Applications; Mohan, K., Ed.; ISRO Tutor- Sensors and Data Processing, CRSE-ITT: Bombay, India, 2007; p. 32. [Google Scholar]
- Light Detection and Ranging (LiDAR). Presented at Portland State University. Available online: http://web.pdx.edu/~jduh/courses/geog493f12/Week04.pdf (accessed on 13 November 2020).
- Gavilán, M.; Balcones, D.; Marcos, O.; Llorca, D.F.; Sotelo, M.A.; Parra, I.; Ocaña, M.; Aliseda, P.; Yarza, P.; Amírola, A. Adaptive road crack detection system by pavement classification. Sensors 2011, 11, 9628–9657. [Google Scholar] [CrossRef]
- Li, X.-Q.; Wang, Z.; Fu, L.-H. A Laser-Based Measuring System for Online Quality Control of Car Engine Block. Sensors 2016, 16, 1877. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laser Triangulation Sensors M.T.I Instruments. Available online: https://www.mtiinstruments.com/technology-principles/laser-triangulation-sensors/ (accessed on 13 November 2020).
- Alhwarin, F.; Ferrein, A.; Scholl, I. IR Stereo Kinect: Improving Depth Images by Combining Structured Light with IR Stereo. In Proceedings of the PRICAI 2014: Trends in Artificial Intelligence; Pham, D.-N., Park, S.-B., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 409–421. [Google Scholar]
- Banks, M.S.; Read, J.C.A.; Allison, R.S.; Watt, S.J. Stereoscopy and the Human Visual System. SMPTE Motion Imaging J. 2012, 121, 24–43. [Google Scholar] [CrossRef]
- Giancola, S.; Valenti, M.; Sala, R. A Survey on 3D Cameras: Metrological Comparison of Time-of-Flight, Structured-Light and Active Stereoscopy Technologies; SpringerBriefs in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-91760-3. [Google Scholar]
- Choosing an Intel® RealSenseTM Depth Camera. 2018. Available online: https://www.intelrealsense.com/compare/ (accessed on 13 November 2020).
- Webster, J. Structured Light Techniques and Applications; Wiley Encyclopedia of Electrical and Electronics Engineering, John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Vit, A.; Shani, G. Comparing RGB-D Sensors for Close Range Outdoor Agricultural Phenotyping. Sensors 2018, 18, 4413. [Google Scholar] [CrossRef] [Green Version]
- Carfagni, M.; Furferi, R.; Governi, L.; Santarelli, C.; Servi, M.; Uccheddu, F.; Volpe, Y. Metrological and Critical Characterization of the Intel D415 Stereo Depth Camera. Sensors 2019, 19, 489. [Google Scholar] [CrossRef] [Green Version]
- Intel® RealSenseTM Depth Camera D415. Available online: https://store.intelrealsense.com/buy-intel-realsense-depth-camera-d415.html (accessed on 13 November 2020).
- Intel RealSense D400 Series Calibration Tools-User Guide; Intel RealSense. 2019. Available online: https://dev.intelrealsense.com/docs/intel-realsensetm-d400-series-calibration-tools-user-guide (accessed on 13 November 2020).
- Grunnet-Jepsen, A.; Sweetser, J.N.; Woodfill, J. Best-Known-Methods for Tuning Intel® RealSenseTM D400 Depth Cameras for Best Performance; Intel Corporation: Satan Clara, CA, USA, 2018; p. 10. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Fuersattel, P.; Plank, C.; Maier, A.; Riess, C. Accurate laser scanner to camera calibration with application to range sensor evaluation. IPSJ Trans. Comput. Vis. Appl. 2017, 9. [Google Scholar] [CrossRef] [Green Version]
- Cabrera, E.V.; Ortiz, L.E.; da Silva, B.M.F.; Clua, E.W.G.; Gonçalves, L.M.G. A versatile method for depth data error estimation in RGB-D sensors. Sensors 2018, 18, 3122. [Google Scholar] [CrossRef] [Green Version]
- Chen, G.; Cui, G.; Jin, Z.; Wu, F.; Chen, X. Accurate Intrinsic and Extrinsic Calibration of RGB-D Cameras with GP-Based Depth Correction. IEEE Sens. J. 2019, 19, 2685–2694. [Google Scholar] [CrossRef]
- Yamazoe, H.; Habe, H.; Mitsugami, I.; Yagi, Y. Depth error correction for projector-camera based consumer depth cameras. Comput. Vis. Media 2018, 4, 103–111. [Google Scholar] [CrossRef] [Green Version]
- Adams, R.; Bischof, L. Seeded region growing. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 641–647. [Google Scholar] [CrossRef] [Green Version]
- Isa, N.A.M. Automated Edge Detection Technique for Pap Smear Images Using Moving K-Means Clustering and Modified Seed Based Region Growing Algorithm. Int. J. Comput. Internet Manag. 2005, 13, 45–59. [Google Scholar]
- Fan, J.; Yau, D.K.Y.; Elmagarmid, A.K.; Aref, W.G. Automatic image segmentation by integrating color-edge extraction and seeded region growing. IEEE Trans. Image Process. 2001, 10, 1454–1466. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Yang, J. Color image segmentation by edge linking and region grouping. J. Shanghai Jiaotong Univ. (Sci.) 2011, 16, 412–419. [Google Scholar] [CrossRef]
- Pavlidis, T.; Liow, Y.-T. Integrating region growing and edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 225–233. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, L.; Huang, Q.; Li, X. A Novel Segmentation Approach Combining Region- and Edge-Based Information for Ultrasound Images. BioMed Res. Int. 2017, 2017, 9157341. [Google Scholar] [CrossRef]
- Chen, H.; Ding, H.; He, X.; Zhuang, H. Color image segmentation based on seeded region growing with Canny edge detection. In Proceedings of the 2014 12th International Conference on Signal Processing (ICSP), Hangzhou, China, 19–23 October 2014; pp. 683–686. [Google Scholar]
- Yi-Wei, Y.; Wang, J.-H. Image segmentation based on region growing and edge detection. In Proceedings of the IEEE SMC’99 Conference Proceedings. 1999 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.99CH37028), Tokyo, Japan, 12–15 October 1999; Volume 6, pp. 798–803. [Google Scholar]
- Al-Hujazi, E.; Sood, A. Range image segmentation combining edge-detection and region-growing techniques with applications sto robot bin-picking using vacuum gripper. IEEE Trans. Syst. Man Cybern. 1990, 20, 1313–1325. [Google Scholar] [CrossRef]
- Schulz, E.; Speekenbrink, M.; Krause, A. A tutorial on Gaussian Process Regression: Modelling, Exploring, and Exploiting Functions. J. Math. Psychol. 2018, 85, 1–16. [Google Scholar] [CrossRef]
- Zhang, N.; Xiong, J.; Zhong, J.; Leatham, K. Gaussian Process Regression Method for Classification for High-Dimensional Data with Limited Samples. In Proceedings of the 2018 Eighth International Conference on Information Science and Technology (ICIST), Cordoba, Spain, 30 June–6 July 2018; pp. 358–363. [Google Scholar]
- Idé, T.; Kato, S. Travel-Time Prediction using Gaussian Process Regression: A Trajectory-Based Approach. In Proceedings of the 2009 SIAM International Conference on Data Mining; Society for Industrial and Applied Mathematics, Sparks, NV, USA, 30 April–2 May 2009; pp. 1185–1196. [Google Scholar]
- Wang, J.M.; Fleet, D.J.; Hertzmann, A. Gaussian Process Dynamical Models for Human Motion. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 283–298. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MacKay, D.J. Bayesian interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Begg, R.; Best, R.; Dell’Oro, L.; Taylor, S. Minimum foot clearance during walking: Strategies for the minimisation of trip-related falls. Gait Posture 2007, 25, 191–198. [Google Scholar] [CrossRef] [PubMed]
- Boodlal, L. Accessible Sidewalks and Street Crossings: An Informational Guide; No. FHWA-SA-03-019; Federal Highway Administration: Washington, DC, USA, 2004. [Google Scholar]
- Roffo, G. Feature Selection Library (MATLAB Toolbox). MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/56937-feature-selection-library (accessed on 13 November 2020).
- Soliman, O.S.; Rassem, A. Correlation Based Feature Selection Using Quantum Bio Inspired Estimation of Distribution Algorithm. In Multi-disciplinary Trends in Artificial Intelligence; Sombattheera, C., Loi, N.K., Wankar, R., Quan, T., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7694, pp. 318–329. ISBN 978-3-642-35454-0. [Google Scholar]
- Wu, M.; Schölkopf, B. A Local Learning Approach for Clustering. In Advances in Neural Information Processing Systems 19; Schölkopf, B., Platt, J.C., Hoffman, T., Eds.; MIT Press: Cambridge, MA, USA, 2007; pp. 1529–1536. [Google Scholar]
- Zeng, H.; Cheung, Y. Feature Selection for Local Learning Based Clustering. In Proceedings of the Advances in Knowledge Discovery and Data Mining; Theeramunkong, T., Kijsirikul, B., Cercone, N., Ho, T.-B., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 414–425. [Google Scholar]
- He, X.; Cai, D.; Niyogi, P. Laplacian Score for Feature Selection. In Advances in Neural Information Processing Systems 18; Weiss, Y., Schölkopf, B., Platt, J.C., Eds.; MIT Press: Cambridge, MA, USA, 2006; pp. 507–514. [Google Scholar]
- Yang, W.; Wang, K.; Zuo, W. Neighborhood Component Feature Selection for High-Dimensional Data. JCP 2012, 7, 161–168. [Google Scholar] [CrossRef]
- Robnik-Sikonja, M.; Kononenko, I. An adaptation of Relief for Attribute Estimation in Regression. In Proceedings of the Machine Learning: Proceedings of the Fourteenth International Conference (ICML’97); Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1997; Volume 5, pp. 296–304. [Google Scholar]
- Winter, D.A. Foot trajectory in human gait: A precise and multifactorial motor control task. Phys. Ther. 1992, 72, 45–53. [Google Scholar] [CrossRef] [PubMed]
- Chiba, H.; Ebihara, S.; Tomita, N.; Sasaki, H.; Butler, J.P. Differential gait kinematics between fallers and non-fallers in community-dwelling elderly people. Geriatr. Gerontol. Int. 2005, 5, 127–134. [Google Scholar] [CrossRef]
- Schulz, B.W.; Lloyd, J.D.; Lee, W.E. The Effects of Everyday Concurrent Tasks on Overground Minimum Toe Clearance and Gait Parameters. Gait Posture 2010, 32, 18–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Kernel/Specifier | MAE (mm) | |
|---|---|---|---|
| Holdout | 10-Fold | ||
| Gaussian Process (M1) | Rational Quadratic | 0.18 | 0.11 |
| Gaussian Process (M2) | Squared Exponential | 0.18 | 0.12 |
| Gaussian Process (M3) | 5/2 Matern | 0.20 | 0.12 |
| Linear (M4) | Simple | 0.56 | 0.56 |
| Linear (M5) | with Interactions | 0.23 | 0.20 |
| Linear (M6) | Robust | 0.46 | 0.20 |
| Linear (M7) | Stepwise | 0.23 | 0.39 |
| Quadratic (M8) | NA | 0.21 | 0.21 |
| Method | MAE (mm) | |||||
|---|---|---|---|---|---|---|
| 9 Features | 4 Features | 1 Feature | ||||
| Holdout | 10-fold | Holdout | 10-fold | Holdout | 10-fold | |
| Linear (M5) | 0.56 | 0.56 | 0.60 | 0.60 | 0.63 | 0.62 |
| Quadratic (M9) | 0.21 | 0.21 | 0.38 | 0.36 | 0.61 | 0.60 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cohen, R.; Fernie, G.; Roshan Fekr, A. A Vision-Based Approach for Sidewalk and Walkway Trip Hazards Assessment. Int. J. Environ. Res. Public Health 2020, 17, 8438. https://doi.org/10.3390/ijerph17228438
Cohen R, Fernie G, Roshan Fekr A. A Vision-Based Approach for Sidewalk and Walkway Trip Hazards Assessment. International Journal of Environmental Research and Public Health. 2020; 17(22):8438. https://doi.org/10.3390/ijerph17228438
Chicago/Turabian StyleCohen, Rachel, Geoff Fernie, and Atena Roshan Fekr. 2020. "A Vision-Based Approach for Sidewalk and Walkway Trip Hazards Assessment" International Journal of Environmental Research and Public Health 17, no. 22: 8438. https://doi.org/10.3390/ijerph17228438
APA StyleCohen, R., Fernie, G., & Roshan Fekr, A. (2020). A Vision-Based Approach for Sidewalk and Walkway Trip Hazards Assessment. International Journal of Environmental Research and Public Health, 17(22), 8438. https://doi.org/10.3390/ijerph17228438