Analysis of Pedestrian Street-Crossing Decision-Making Based on Vehicle Deceleration-Safety Gap



Abstract
:1. Introduction
2. Materials and Method
2.1. Experimental Site
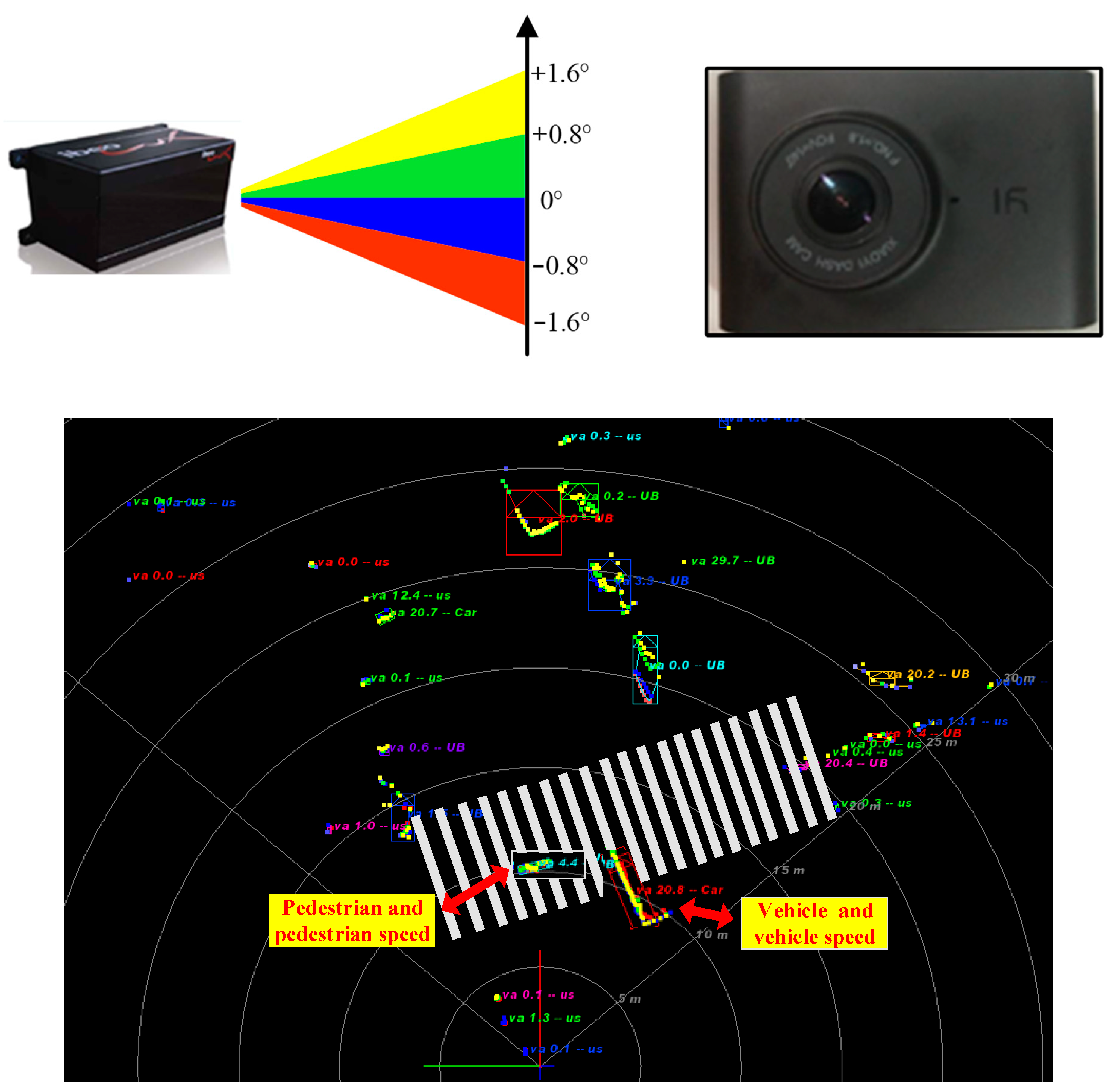
2.2. Apparatus
2.3. Data Collection
3. The Pedestrian Decision-Making Model
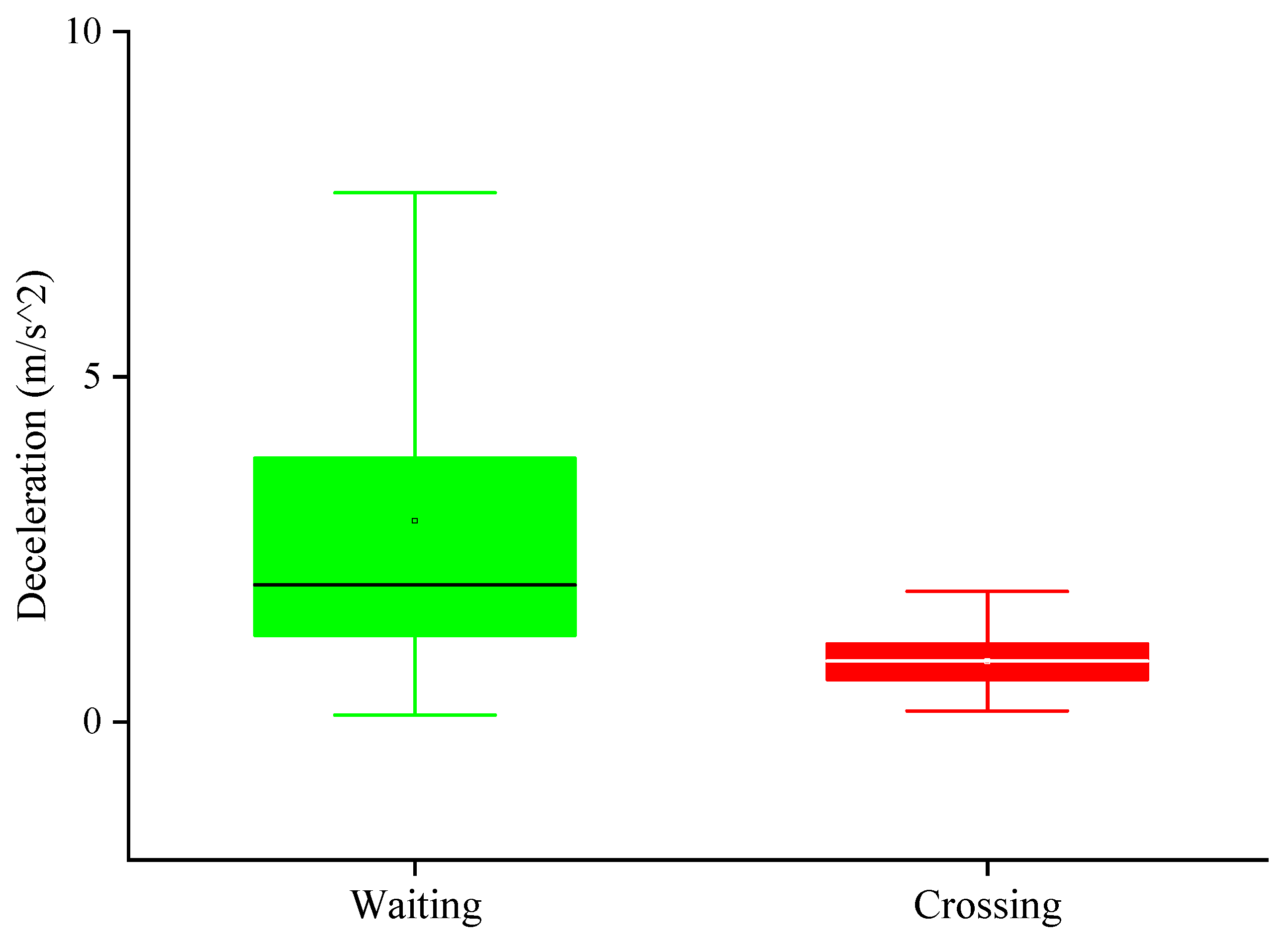
3.1. Analysis of Related Parameters in Crossing Decision
3.2. Vehicle Deceleration-Safety Gap Model (VD-SGM)
4. Threshold Determination
4.1. Signal Detection Theory (SDT)
4.2. Vehicle Deceleration Threshold Selection Based on SDT
- (1)
- According to the decision matrix in Table 1, record the state corresponding to each sample when the deceleration threshold takes different values. The status includes hit, false alarm, miss, and correct rejection. The threshold is selected to be calculated in steps of 0.01 s.
- (2)
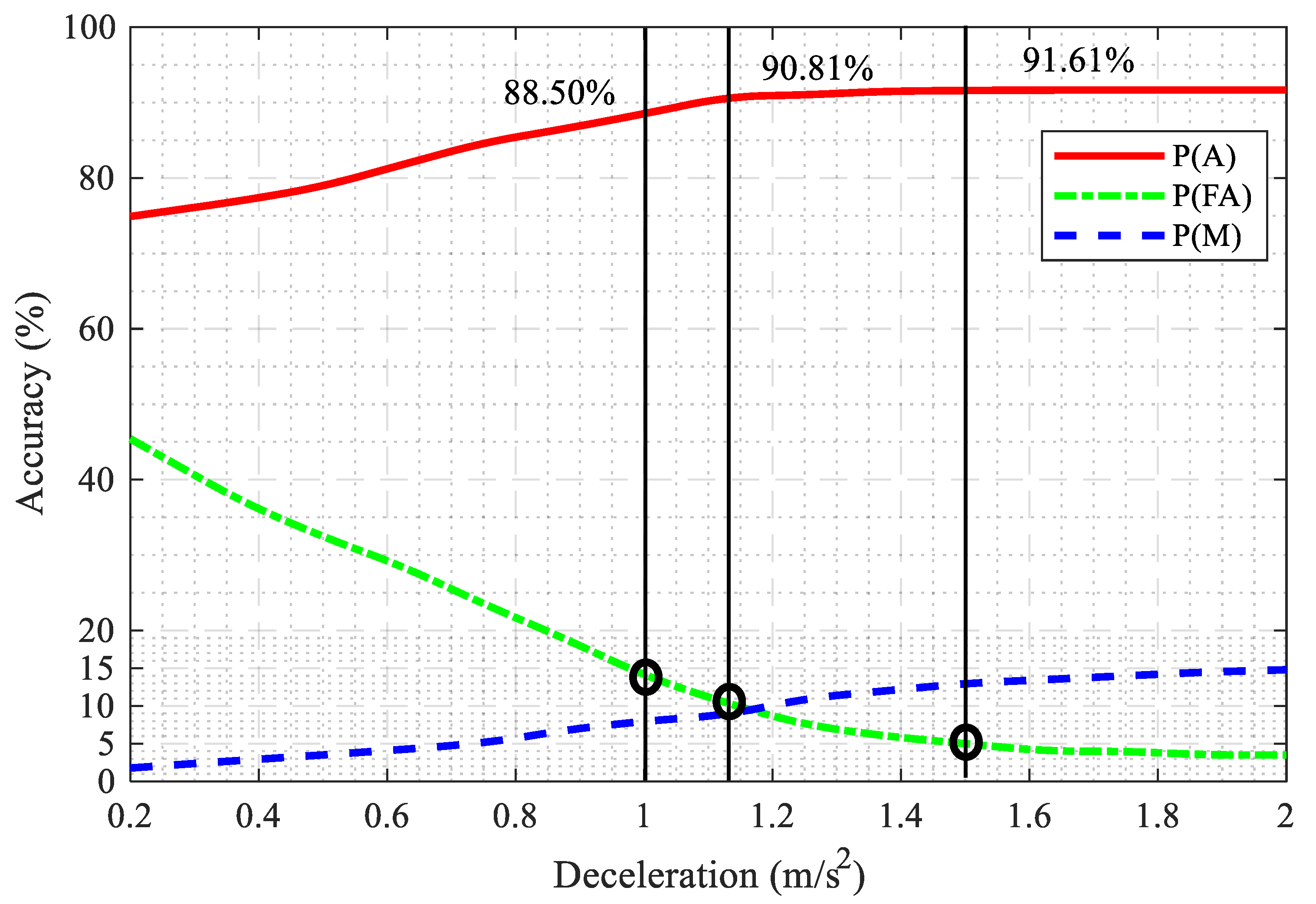
- Count the false alarm rate, miss rate, and accuracy of all 2480 samples at different thresholds and draw the corresponding curve, as shown in Figure 7.
- (3)
- Analyze the curve to determine the vehicle threshold of the model.

5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- General Administration of State Security Supervision and Administration and Ministry of Transport. Road Traffic Safety Development Report; Traffic Management Research Institute of the Ministry of Public Security: Wuxi, Jiangsu, China, 2017. [Google Scholar]
- TRB. Highway Capacity Manual 2010; Transportation Research Board of the National Academies: Washington, WA, USA, 2010. [Google Scholar]
- Garber, N.J.; Hoel, L.A. Review of Traffic and Highway Engineering; West Publishing Company: Eagan, MN, USA, 1988. [Google Scholar]
- Lobjois, R.; Cavallo, V. Age-related differences in street-crossing decisions: The effects of vehicle speed and time constraints on gap selection in an estimation task. Accid. Anal. Prev. 2007, 39, 934–943. [Google Scholar] [CrossRef] [PubMed]
- Lobjois, R.; Benguigui, N.; Cavallo, V. The effects of age and traffic density on street-crossing behavior. Accid. Anal. Prev. 2013, 53, 166–175. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chu, X.; Baltes, M.R. Pedestrian Mid-Block Crossing Difficulty; National Center for Transit Research (NCTR): Tampa, FL, USA, 2001. [Google Scholar]
- Lu, S.; Fang, S. The analysis method of the average critical gap of pedestrian crossing the motor vehicle flow. Traffic Saf. 2008, 1, 145–148. [Google Scholar]
- Sun, Z.Y.; Rong, J.; He, M.; Su, Y.Q. A model of pedestrian gap acceptance in crosswalks at signalized intersections. J. Highw. Transp. Res. Dev. 2004, 21, 102–104. [Google Scholar]
- Xiang, H.; Zhang, Q. Risk analysis model for pedestrian crossing without signal control. China Saf. Sci. J. 2016, 26, 126–130. [Google Scholar]
- Bai, Y.; He, X.; Long, L.; Yang, X. Study on Pedestrian Red Light Crossing Violation Behaviors: Observation at Four-Phase Signalized Intersections in Shanghai, China. Transp. Res. Board Meet. 2013, 13, 3465. [Google Scholar]
- Iryo-Asano, M.; Alhajyaseen, W. Modeling pedestrian crossing speed profiles considering speed change behavior for the safety assessment of signalized intersections. Accid. Anal. Prev. 2017, 108, 332–342. [Google Scholar] [CrossRef]
- Sun, R.; Zhuang, X.; Wu, C.; Zhao, G.; Zhang, K. The estimation of vehicle speed and stopping distance by pedestrians crossing streets in a naturalistic traffic environment. Transp. Res. Part F Traffic Psychol. Behav. 2015, 30, 97–106. [Google Scholar] [CrossRef]
- Zhuang, X.; Wu, C.; Ma, S. Cross or wait? Pedestrian decision making during clearance phase at signalized intersections. Accid. Anal. Prev. 2018, 111, 115–124. [Google Scholar] [CrossRef]
- Alver, Y.; Onelcin, P. Gap acceptance of pedestrians at overpass locations. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 436–443. [Google Scholar] [CrossRef]
- Adepu, R.; Ashritha, K.; Kumar, M. Development of Model for Pedestrian Gap Based on Land Use Pattern at Midblock Location and Estimation of Delay at Intersections. J. Inst. Eng. (India) Ser. A 2018, 99, 413–422. [Google Scholar] [CrossRef]
- Zhao, J.; Malenje, J.O.; Tang, Y.; Han, Y. Gap acceptance probability model for pedestrians at unsignalized mid-block crosswalks based on logistic regression. Accid. Anal. Prev. 2019, 129, 76–83. [Google Scholar] [CrossRef] [PubMed]
- Zhu, F. A Model of Pedestrian Gap Selecting in Crosswalks at Unsignalized Intersections. Traffic Inf. Saf. 2011, 2, 36–43. [Google Scholar]
- Risto, M.; Emmenegger, C.; Vinkhuyzen, E.; Cefkin, M.; Hollan, J. Human-Vehicle Interfaces: The Power of Vehicle Movement Gestures in Human Road User Coordination. In Proceedings of the Ninth International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Manchester Village, VT, USA, 26–29 June 2017; pp. 186–196. [Google Scholar]
- Petzoldt, T.; Schleinitz, K.; Banse, R. Potential safety effects of a frontal brake light for motor vehicles. IET Intell. Transp. Syst. 2018, 12, 449–453. [Google Scholar] [CrossRef]
- Zimmermann, R.; Wettach, R. First Step into Visceral Interaction with Autonomous Vehicles. In Proceedings of the 9th International Conference on Theory and Practice of Electronic Governance; Association for Computing Machinery (ACM): New York, NY, USA, 2017; pp. 58–64. [Google Scholar]
- Olszewski, P.; Dąbkowski, P.; Szagała, P.; Czajewski, W.; Buttler, I. Surrogate safety indicator for unsignalised pedestrian crossings. Transp. Res. Part F Traffic Psychol. Behav. 2020, 70, 25–36. [Google Scholar] [CrossRef]
- Rudin, C. Stop explaining black box machine learning models for high stakes decisions and use interpretable models instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar] [CrossRef] [Green Version]
- Pawar, D.S.; Patil, G.R. Pedestrian temporal and spatial gap acceptance at mid-block street crossing in developing world. J. Saf. Res. 2015, 52, 39–46. [Google Scholar] [CrossRef]
- Wan, B.; Rouphail, N.M. Using Arena for Simulation of Pedestrian Crossing in Roundabout Areas. Transp. Res. Rec. J. Transp. Res. Board 2004, 1878, 58–65. [Google Scholar] [CrossRef]
- Hughes, R. The flow of large crowds of pedestrians. Math. Comput. Simul. 2000, 53, 367–370. [Google Scholar] [CrossRef]
- Lam, W.H.K.; Cheung, C.-Y. Pedestrian Speed/Flow Relationships for Walking Facilities in Hong Kong. J. Transp. Eng. 2000, 126, 343–349. [Google Scholar] [CrossRef]
- Fugger, T.F.; Randles, B.C., Jr.; Stein, A.C.; Whiting, W.C.; Gallagher, B. Analysis of pedestrian gait and perception-reaction at signal-controlled crosswalk intersections. Transp. Res. Rec. 2000, 1705, 20–25. [Google Scholar] [CrossRef]
- Lees, M.N.; Lee, J.D. The influence of distraction and driving context on driver response to imperfect collision warning systems. Ergonomics 2007, 50, 1264–1286. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Li, H. Signal Detection and Estimation; Tsinghua University Press: Beijing, China, 2010. [Google Scholar]
- Phan, M.T.; Fremont, V.; Thouvenin, I.; Sallak, M.; Cherfaoui, V.; Tien, P.M. Estimation of driver awareness of pedestrian based on Hidden Markov Model. IEEE Intell. Veh. Symp. (IV) 2015, 970–975. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous Vehicles That Interact With Pedestrians: A Survey of Theory and Practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Sun, Q.; Guo, Y.; Fu, R.; Yuan, W. Improving the User Acceptability of Advanced Driver Assistance Systems Based on Different Driving Styles: A Case Study of Lane Change Warning Systems. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4196–4208. [Google Scholar] [CrossRef]
- Vinayaraj, V.S.; Chaudhari, A.; Arkatkar, S.; Joshi, G.J.; Parida, M. Comparative Study of Pedestrian Critical Gap Estimation Methods at Unsignalized Midblock Crosswalks. In Transportation Research; Springer: Singapore, 2019; pp. 151–167. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Crossing | Waiting | |
|---|---|---|
| crossing | Hit f1, | Miss f2, |
| waiting | False alarm f3, | Correct rejection f4, |
| Threshold /(m/s2) | False Alarm Rate (%) | Miss Rate (%) | Accuracy Rate (%) |
|---|---|---|---|
| 1.50 | 5 | 13.00 | 91.61 |
| 1.12 | 10 | 8.83 | 90.81 |
| 1.00 | 15 | 8.17 | 88.50 |
| PA (%) | P(M) (%) | P(FA) (%) | |
|---|---|---|---|
| ST1 | 90.81 | 8.83 | 10.00 |
| Raff model | 85.68 | 13.41 | 15.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Guo, Y.; Chen, Y.; Sun, Q.; Wang, C. Analysis of Pedestrian Street-Crossing Decision-Making Based on Vehicle Deceleration-Safety Gap. Int. J. Environ. Res. Public Health 2020, 17, 9247. https://doi.org/10.3390/ijerph17249247
Zhang H, Guo Y, Chen Y, Sun Q, Wang C. Analysis of Pedestrian Street-Crossing Decision-Making Based on Vehicle Deceleration-Safety Gap. International Journal of Environmental Research and Public Health. 2020; 17(24):9247. https://doi.org/10.3390/ijerph17249247
Chicago/Turabian StyleZhang, Hongjia, Yingshi Guo, Yunxing Chen, Qinyu Sun, and Chang Wang. 2020. "Analysis of Pedestrian Street-Crossing Decision-Making Based on Vehicle Deceleration-Safety Gap" International Journal of Environmental Research and Public Health 17, no. 24: 9247. https://doi.org/10.3390/ijerph17249247
APA StyleZhang, H., Guo, Y., Chen, Y., Sun, Q., & Wang, C. (2020). Analysis of Pedestrian Street-Crossing Decision-Making Based on Vehicle Deceleration-Safety Gap. International Journal of Environmental Research and Public Health, 17(24), 9247. https://doi.org/10.3390/ijerph17249247