A Hybrid PSO–SVM Model Based on Safety Risk Prediction for the Design Process in Metro Station Construction


Abstract
:1. Introduction
2. Methodology
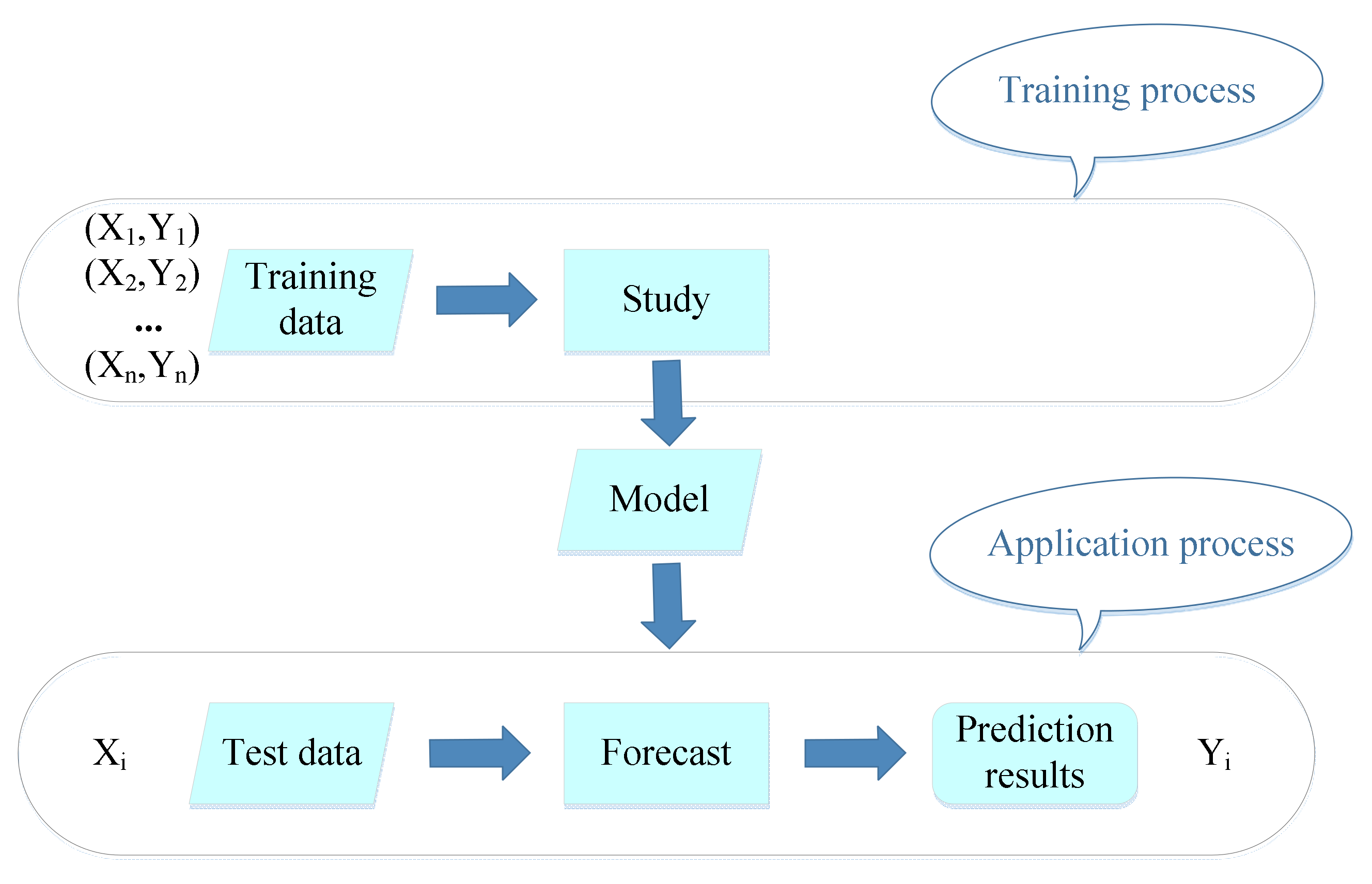
2.1. Support Vector Machine
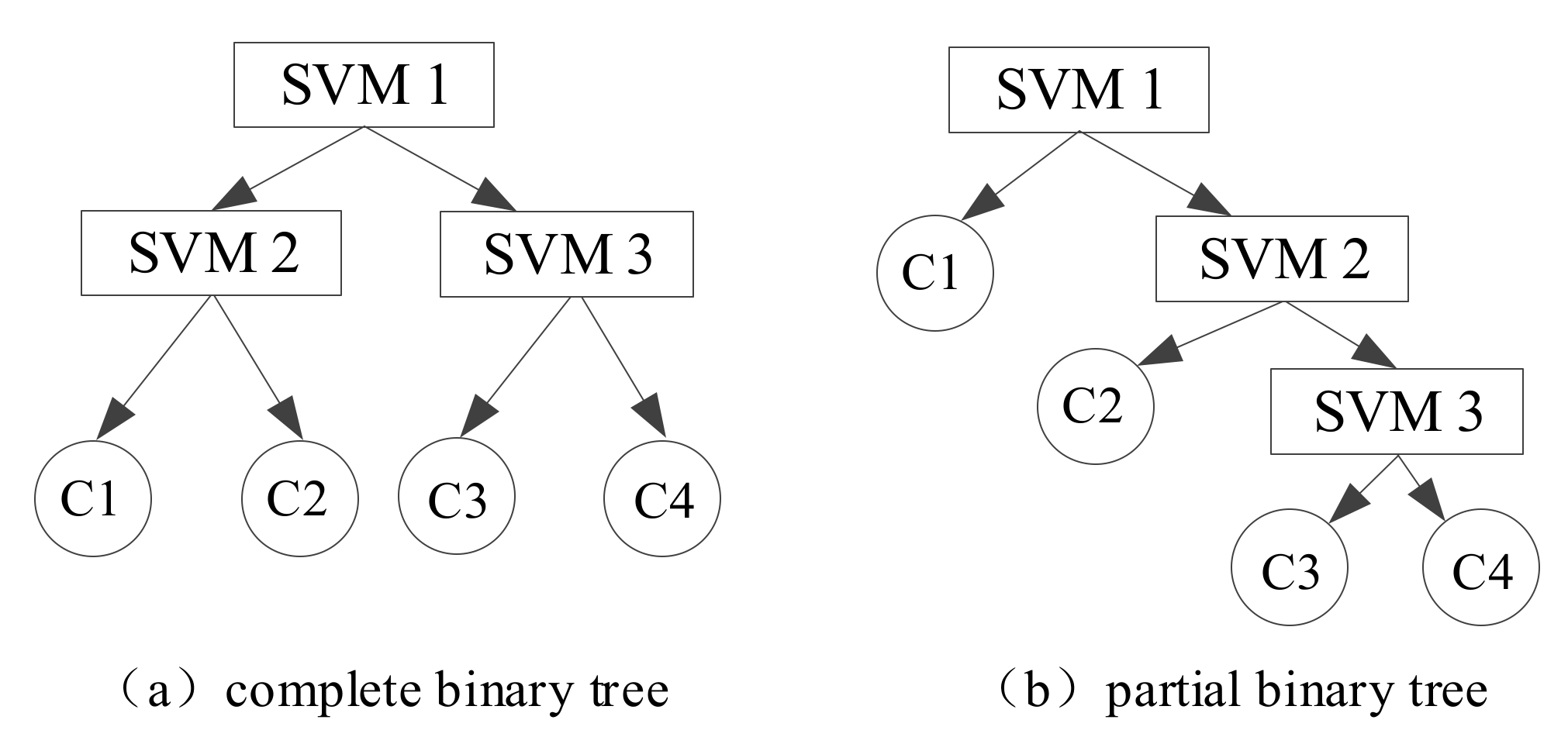
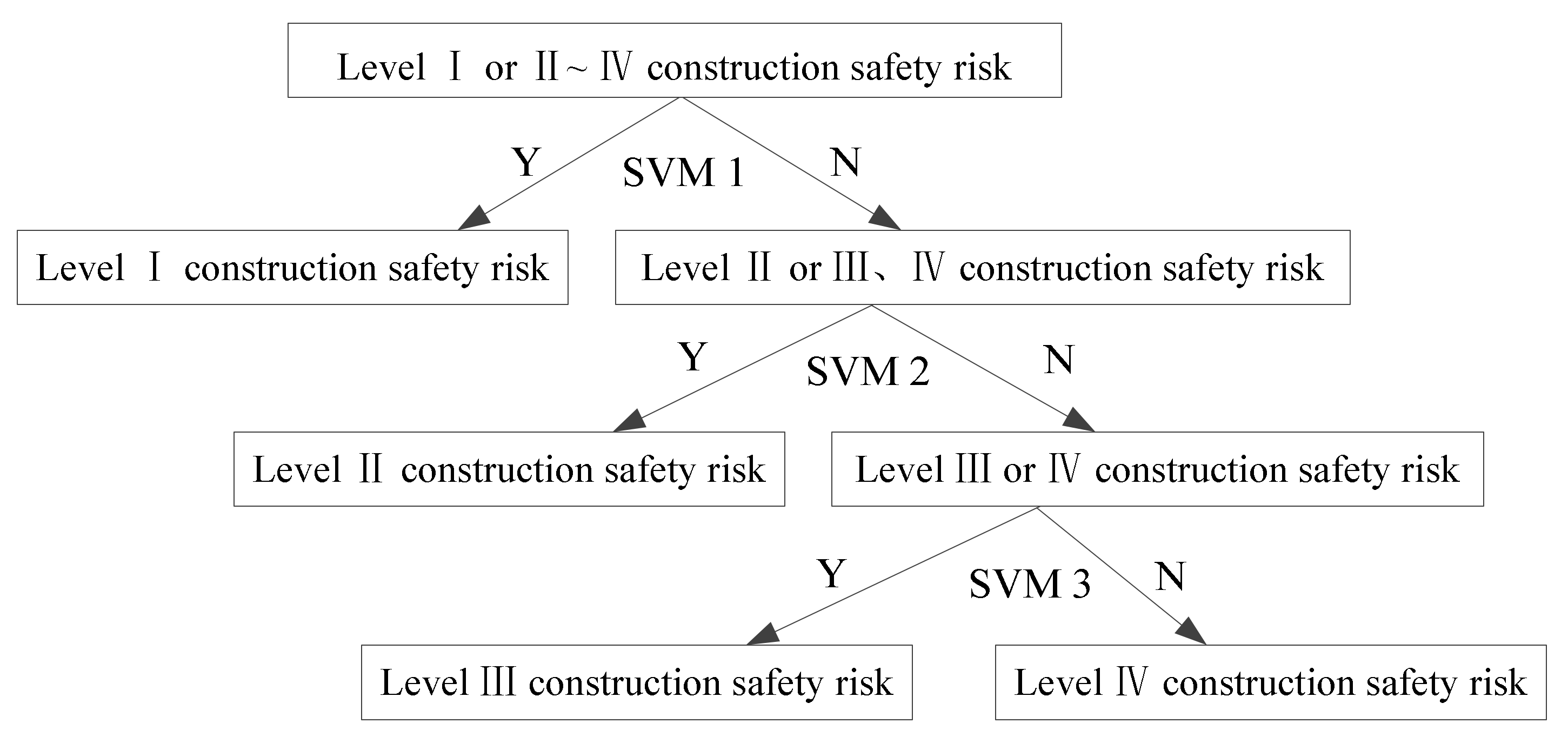
2.2. The Multi-Classification Support Vector Machine (SVM) Prediction Model Based on Binary Tree
2.3. Parameter Optimization of SVM Model Based on Particle Swarm Optimization (PSO)
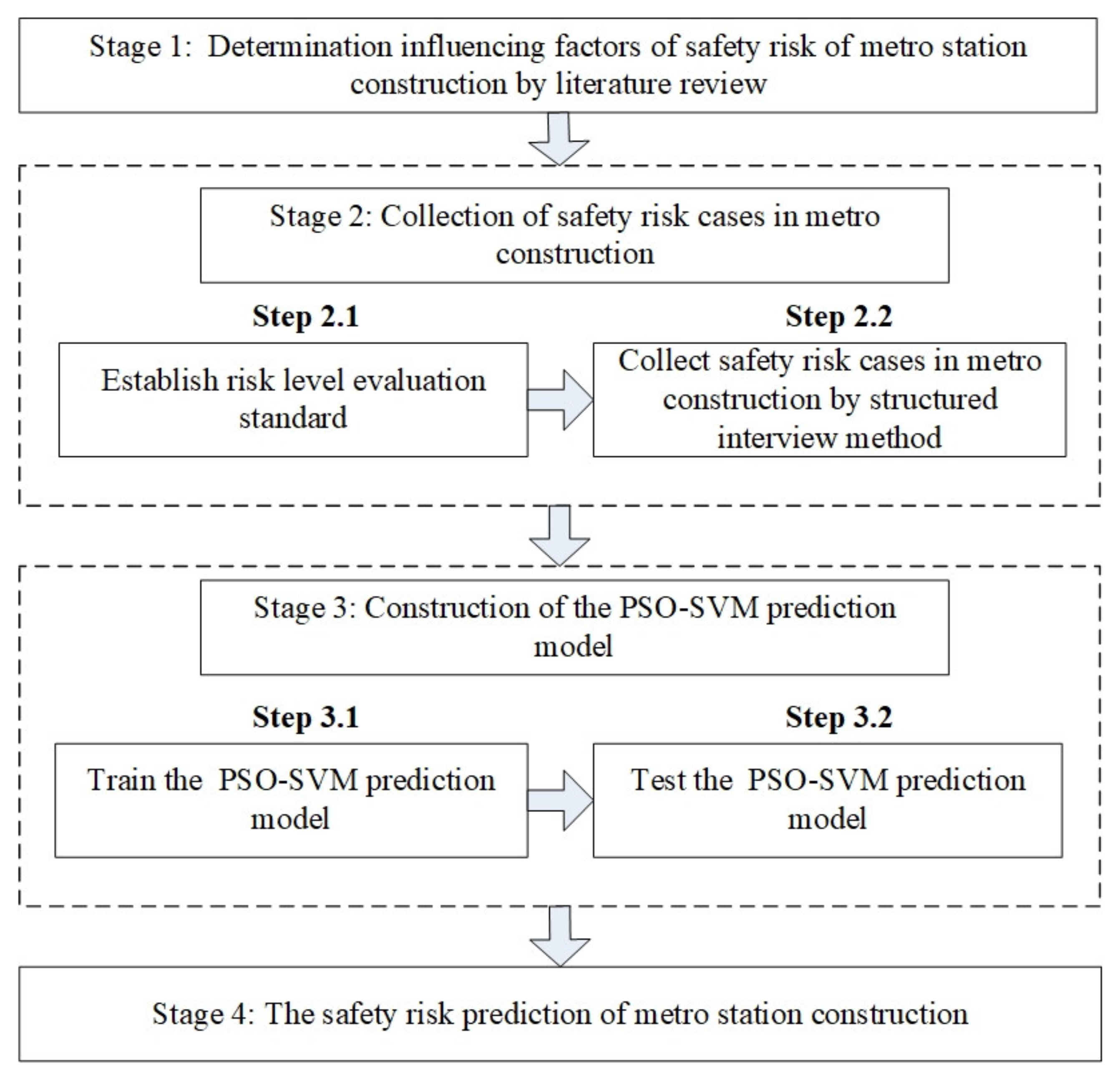
3. Framework for Safety Risk Prediction of Metro Station Construction
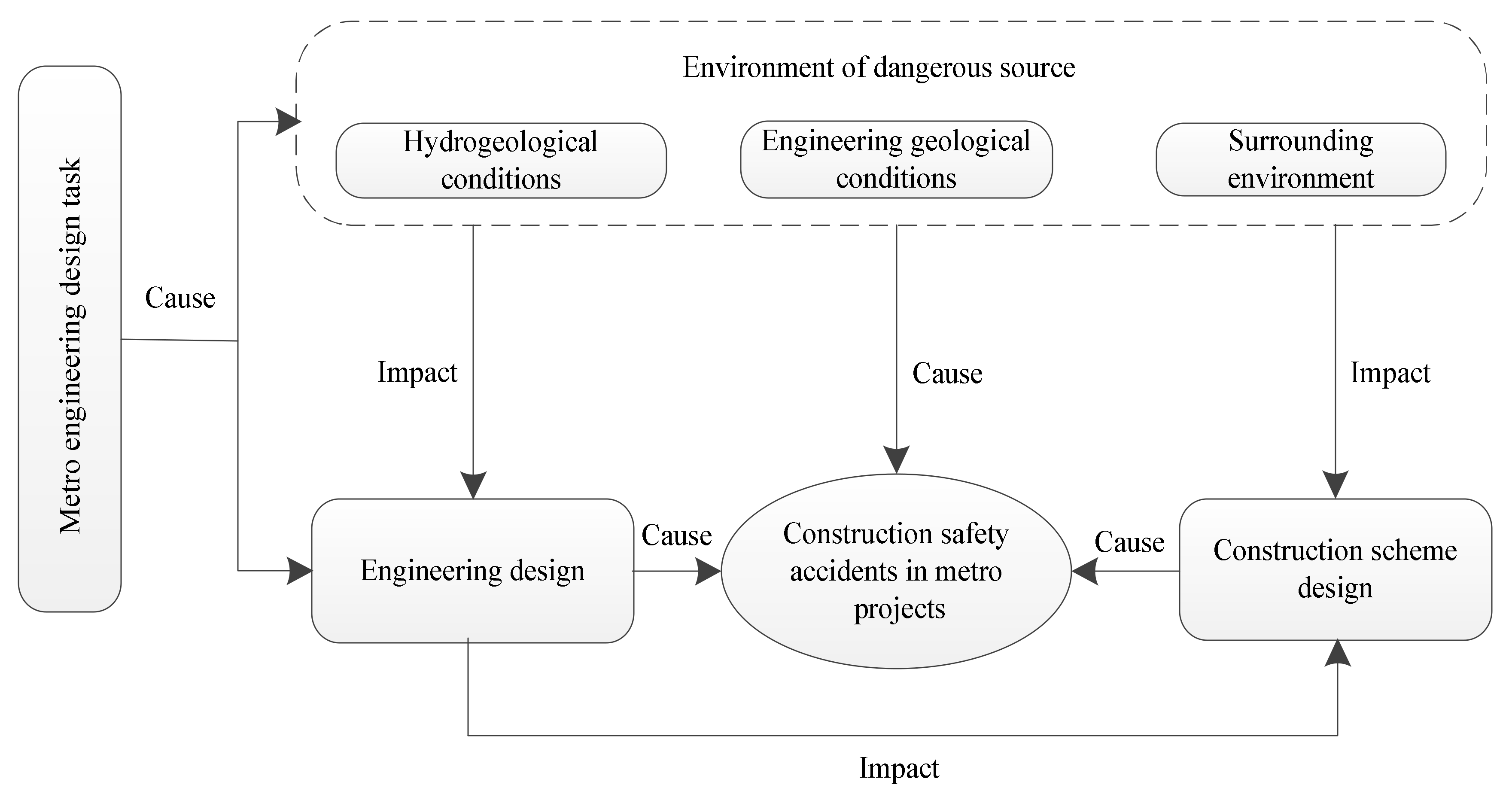
3.1. Stage 1: Identify the Influencing Factors of Safety Risk in Metro Construction
3.2. Stage 2: Collection of Safety Risk Cases in Metro Construction
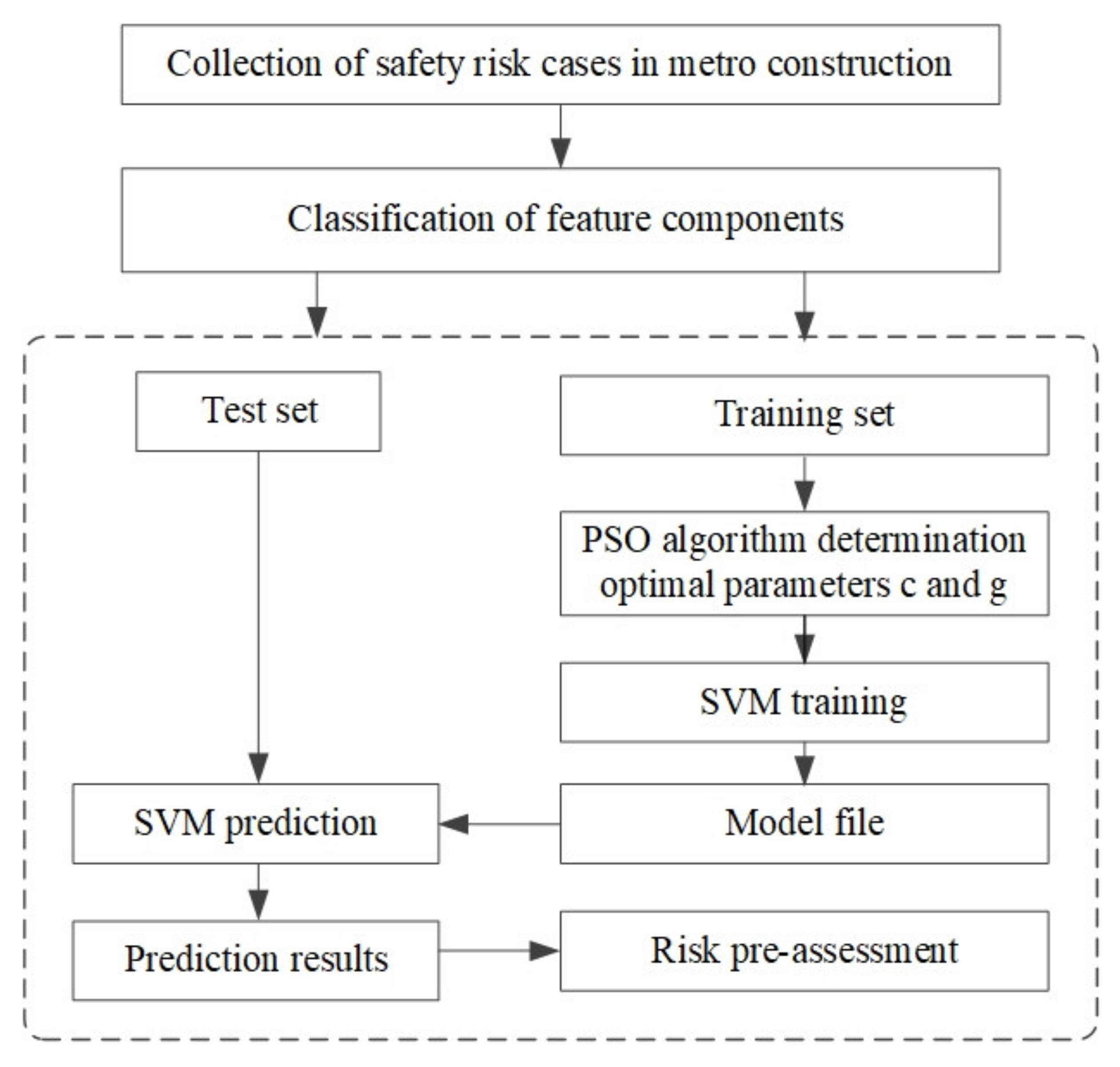
3.3. Stage 3: Construction of the PSO–SVM Prediction Model
3.4. Stage 4: The Safety Risk Prediction of Metro Station Construction
4. Case Study
4.1. Determination of Influencing Factors of Safety Risk in Metro Station Construction
4.2. Collection of Safety Risk Cases in Metro Construction
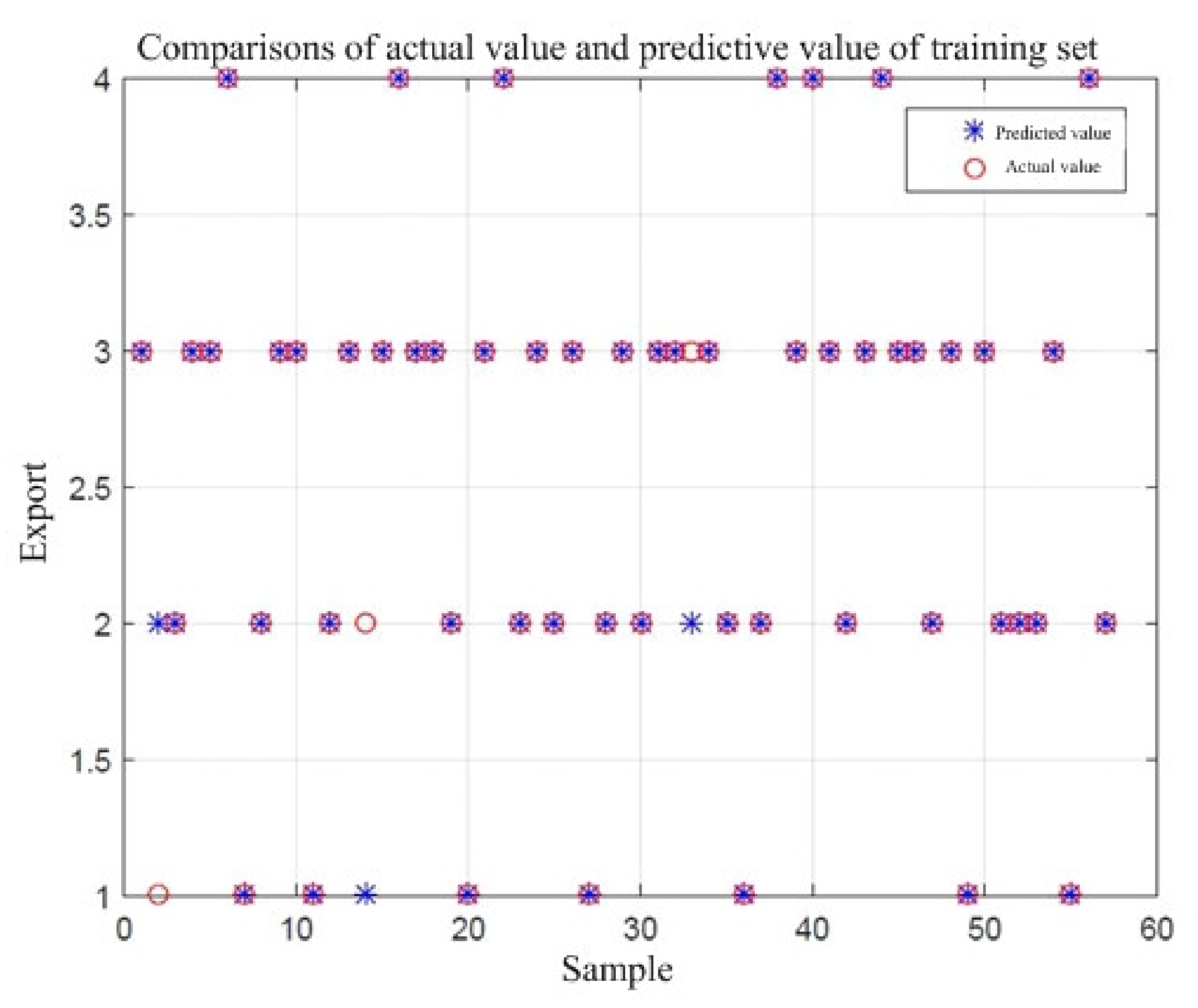
4.3. Construction of the PSO–SVM Model
4.4. Safety Risk Prediction of the Metro Station Construction
4.5. Results and Discussion
4.5.1. Single-Factor Dynamic Adjustment Analysis
4.5.2. Multi-Factor Dynamic Adjustment Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhong, M.; Zhang, X.; Liu, T.; Wei, X.; Fan, W. Safety evaluation of engineering and construction projects in China. J. Loss Prev. Process Ind. 2003, 16, 201–207. [Google Scholar] [CrossRef]
- China. Annual statistical and analysis report of urban rail transit 2018. Urban Rail Transit 2019, 4, 16–34. [Google Scholar]
- Qian, Q.; Lin, P. Safety risk management of underground engineering in china: Progress, challenges and strategies. J. Rock Mech. Geotech. Eng. 2016, 8, 423–442. [Google Scholar] [CrossRef] [Green Version]
- Li, H.R.; Li, Q.M.; Lu, Y. Statistical analysis on regularity of subway construction accidents from 2002 to 2016 in china. Urban Rapid Rail Transit 2017, 30, 12–19. [Google Scholar]
- Simon, H.A. The Sciences of the Artificial; MIT Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Cagan, J.; Kotovsky, K.; Simon, H.A. Scientific discovery and inventive engineering design: Cognitive and computational similarities. In Formal Engineering Design Synthesis; Cambridge University Press: Cambridge, MA, USA, 2001; pp. 442–465. [Google Scholar]
- Simon, H.A. The Sciences of the Artificial, 3rd ed.; The MIT Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Simon, H.A.; Kotovsky, K. Human acquisition of concepts for sequential patterns. Psychol. Rev. 1963, 70, 534–546. [Google Scholar] [CrossRef]
- March, S.T.; Smith, G.F. Design and natural science research on information technology. Decis. Support Syst. 1995, 15, 251–266. [Google Scholar] [CrossRef]
- Gambatese, J.A. Liability in designing for construction worker safety. J. Arch. Eng. 1998, 4, 107–112. [Google Scholar] [CrossRef]
- Manuele, F.A. Prevention through Design (PtD): History and Future. J. Saf. Res. 2008, 39, 127–130. [Google Scholar] [CrossRef]
- Xiahou, X.; Yue, Y.; Lu, Y.; Yuan, J.; Qiming, L. Design For Safety: A literature Review. J. Eng. Manag. 2016, 30, 7–12. [Google Scholar]
- Storey, N. Design for Safety; Springer: London, UK, 1999. [Google Scholar]
- Zemliak, A. Analog system design problem formulation on the basis of control theory. In Proceedings of the 8th IEEE International Conference on Electronics, Circuits and Systems, Malta, 2–5 September 2001. [Google Scholar]
- Mao, Y. Design for Construction Safety: A Literature Review. Criocm2009 Int. Symp. Adv. Constr. Manag. Real Estate 2009, 1–6, 1408–1415. [Google Scholar]
- Michael, T.; John, G. The Trajectories of Prevention through Design in Construction. J. Saf. Res. 2008, 39, 225–230. [Google Scholar]
- Suraji, A.; Duff, A.R.; Peckitt Stephen, J. Development of Causal Model of Construction Accident Causation. J. Constr. Eng. Manag. 2001, 127, 337–344. [Google Scholar] [CrossRef]
- Haslam, R.A.; Hide, S.A.; Gibb, A.G.F.; Gyi, D.E.; Pavitt, T.; Atkinson, S.; Duff, A.R. Contributing factors in construction accidents. Appl. Erg. 2005, 36, 401–415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hollnagel, E. Risk+barriers=safety? Saf. Sci. 2008, 46, 221–229. [Google Scholar] [CrossRef]
- Yuan, J.; Li, X.; Xiahou, X.; Tymvios, N.; Zhou, Z.; Li, Q. Accident prevention through design (PtD): Integration of building information modeling and PtD knowledge base. Autom. Constr. 2019, 102, 86–104. [Google Scholar] [CrossRef]
- Aksorn, T.; Hadikusumo, B.H.W. Critical success factors influencing safety program performance in Thai construction projects. Saf. Sci. 2008, 46, 709–727. [Google Scholar] [CrossRef]
- Hansen, D.C. Measuring and Improving Designer Hazard Recognition Skill. Master’s Thesis, University of Colorado, Washington, DC, USA, 2011. [Google Scholar]
- Weinstein, M.; Gambatese, J.; Hecker, S. Can Design Improve Construction Safety?: Assessing the Impact of a Collaborative Safety-in-Design Process. J. Constr. Eng. Manag. 2005, 131, 1125–1134. [Google Scholar] [CrossRef] [Green Version]
- Michael, B. Linking construction fatalities to the design for construction safety concept. Saf. Sci. 2005, 43, 589–611. [Google Scholar]
- Katie, S.D.; Matthew, H. Prevention through design and construction safety management strategies for high performance sustainable building construction. Constr. Manag. Econ. 2012, 30, 165–177. [Google Scholar]
- Gambatese, J.; Hinze, J. Addressing construction worker safety in the design phase. Autom. Constr. 1999, 8, 643–649. [Google Scholar] [CrossRef]
- Gambatese, J.A.; Hinze, J.W.; Behm, M. Viability of Designing for Construction Worker Safety. J. Constr. Eng. Manag. 2005, 131, 1029–1036. [Google Scholar] [CrossRef] [Green Version]
- Matthew, R.H.; Daniel, H. Measuring and improving designer hazard recognition skill: Critical competency to enable prevention through design. Saf. Sci. 2016, 82. [Google Scholar]
- Toole, T.M. Increasing engineers’ role in construction safety: Opportunities and barriers. J. Prof. Issues Eng. Educ. Pr. 2005, 131, 199–207. [Google Scholar] [CrossRef]
- Gambatese, J.A.; Hinze, J.W.; Haas, C.T. Tool to design for construction worker safety. J. Arch. Eng. 1997, 3, 32–41. [Google Scholar] [CrossRef]
- Hadikusumo, B.H.W.; Rowlinson, S. Capturing safety knowledge using design-for-safety-process tool. J. Constr. Eng. Manag. 2004, 130. [Google Scholar] [CrossRef]
- Seo, J.W.; Choi, H.H. Risk-based safety impact assessment methodology for underground construction projects in korea. J. Constr. Eng. Manag. 2008, 134. [Google Scholar] [CrossRef]
- Hossai, M.A.; Abbott, E.L.S.; Chua, D.K.H.; Qui, N.T.; Goh, Y.M. Design-for-Safety knowledge library for BIM-integrated safety risk reviews. Autom. Constr. 2018, 94, 290–302. [Google Scholar] [CrossRef]
- Fang, Q.; Li, H.; Luo, X.C.; Ding, L.Y.; Luo, H.B.; Li, C.Q. Computer vision aided inspection on falling prevention measures for steeplejacks in an aerial environment. Autom. Constr. 2018, 93, 148–164. [Google Scholar] [CrossRef]
- Zhang, S.J.; Boukamp, F.; Teizer, J. Ontology-based semantic modeling of construction safety knowledge: Towards automated safety planning for job hazard analysis (JHA). Autom. Constr. 2015, 52, 29–41. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.J.; Teizer, J. Geotechnical and safety protective equipment planning using range point cloud data and rule checking in building information modeling. Autom. Constr. 2015, 49, 250–261. [Google Scholar] [CrossRef]
- Zhang, S.J.; Sulankivi, K.; Kiviniemi, M.; Romo, I.; Eastman, C.M.; Teizere, J. BIM-based fall hazard identification and prevention in construction safety planning. Saf. Sci. 2015, 72, 31–45. [Google Scholar] [CrossRef]
- Kim, K.; Cho, Y.; Zhang, S.J. Integrating work sequences and temporary structures into safety planning: Automated scaffolding-related safety hazard identification and prevention in BIM. Autom. Constr. 2016, 70, 128–142. [Google Scholar] [CrossRef]
- Kim, J.; Moon, I. Automatic verification of control logics in safety instrumented system design for chemical process industry. J. Loss Prev. Process Ind. 2009, 22, 975–980. [Google Scholar] [CrossRef]
- Yang, J.M.; Ko, B.S.; Park, C.; Yoo, B.; Shin, D.; Ko, J.W. Design and implementation of an integrated safety management system for compressed natural gas stations using ubiquitous sensor network. Korean J. Chem. Eng. 2014, 31, 393–401. [Google Scholar] [CrossRef]
- Hassnawi, L.A.; Ahmad, R.B.; Yahya, A.; Aljunid, S.A.; Ali, Z.G.; Ibraheem, Z.T. A New Design for a Motorway Surveillance System Using a Wireless Ad-Hoc Camera Network to Improve Safety. Arab. J. Sci. Eng. 2014, 39, 2783–2797. [Google Scholar] [CrossRef]
- Chang, K.C.; Wang, K.H. Design and Implementation of Traffic Safety Guardian System for Android based on OpenCV. In Proceedings of the 2012 International conference on connected vehicles and expo: ICCVE 2012, Beijing, China, 12–16 December 2012; pp. 288–289. [Google Scholar]
- Petrov, Z.; Zaykov, P.G.; Cardoso, J.P.; Coutinho, J.G.F. An aspect-oriented approach for designing safety-critical systems. In Proceedings of the 2013 IEEE Aerospace Conference. [v.1], Big Sky, MT, USA, 2–9 March 2013; pp. 1–10. [Google Scholar]
- Hegde, J.; Rokseth, B. Applications of machine learning methods for engineering risk assessment—A review. Saf. Sci. 2020, 122, 104492. [Google Scholar] [CrossRef]
- Yu, Q.Z.; Ding, L.Y.; Zhou, C.; Luo, H.B. Analysis of factors influencing safety management for metro construction in China. Accid. Anal. Prev. 2014, 68, 131–1338. [Google Scholar] [CrossRef]
- Zhang, C.P.; Li, L.M.; Zhang, D.L.; Zhang, S.L. Types and characteristics of safety accidents induced by metro construction. Inf. Manag. Innov. Manag. Ind. Eng. 2009 Int. Conf. 2009, 3, 185–188. [Google Scholar]
- Ghosh, S.; Jintanapakanont, J. Identifying and assessing the critical risk factors in an underground rail project in Thailand: A factor analysis approach. Int. J. Proj. Manag. 2004, 22, 633–643. [Google Scholar] [CrossRef]
- Wu, X.; Jiang, Z.; Zhang, L.; Skibniewski, M.J.; Zhong, J. Dynamic risk analysis for adjacent buildings in tunneling environments: A Bayesian network based approach. Stoch.Environ. Res. Risk Assess. 2015, 29, 1447–1461. [Google Scholar] [CrossRef]
- Li, M.; Yu, H.; Jin, H.; Liu, P. Methodologies of safety risk control for China’s metro construction based on BIM. Saf. Sci. 2018, 110, 418–426. [Google Scholar] [CrossRef]
- Zheng, X.; Ma, F.H. Materials, Metro Construction Safety Risk Assessment Based on the Fuzzy AHP and the Comprehensive Evaluation Method. Appl. Mech. Mater. 2014, 580–583, 1243–1248. [Google Scholar] [CrossRef]
- Guo, H.L.; Yu, Y.T.; Zhang, W.S.; Li, Y. BIM and safety rules based automated identification of unsafe design factors in construction. Procedia Eng. 2016, 164, 467–472. [Google Scholar]
- He, Y.; Li, H.; Wang, X. A Study on Risk Prediction Model of Coal Enterprise Safety Management—Based on RS-SVM. East China Econ. Manag. 2014, 28, 159–163. [Google Scholar]
- Chen, Z.; Zhao, F.; Zhou, J.; Huang, P.; Zhang, X. Fault Diagnosis of Loader Gearbox Based on an ICA and SVM Algorithm. Int. J.Environ. Res. Public 2019, 16, 4868. [Google Scholar] [CrossRef] [Green Version]
- Fan, J.; Li, M.; Guo, F.; Yan, Z.; Zheng, X.; Zhang, Y.; Xu, Z.; Wu, F. Priorization of River Restoration by Coupling Soil and Water Assessment Tool (SWAT) and Support Vector Machine (SVM) Models in the Taizi River Basin, Northern China. Int. J.Environ. Res. Public Health 2018, 15, 2090. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Yin, K.; Cao, Y.; Ahmed, B. Application of time series analysis and PSO–SVM model in predicting the Bazimen landslide in the Three Gorges Reservoir, China. Eng. Geol. 2016, 204, 108–120. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.-q.; Zhang, H.-y. A hybrid PSO-SVM model based on clustering algorithm for short-term atmospheric pollutant concentration forecasting. Technol. Soc. Chang. 2019, 146, 41–54. [Google Scholar] [CrossRef]
- Goldkuhl, G. Design theories in information systems-a need for multi-grounding. J. Inf. Technol. Theory Appl. 2004, 6, 59–72. [Google Scholar]
- Hevner, A.R.; March, S.T.; Park, J.; Ram, S. Design Science in Information Systems Research. Mis Q. 2004, 28, 75–105. [Google Scholar] [CrossRef] [Green Version]
- Behm, M. Safe Design Suggestions for Vegetated Roofs. J. Constr. Eng. Manag. 2012, 138, 999–1003. [Google Scholar]
- Cristianini, N.; Taylo, J.S. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods; Cambridge University Press: Oxford, UK, 2000. [Google Scholar]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer-Verlag: New York, NY, USA, 1995. [Google Scholar]
- Vapnik, V.N. Statistical Learning Theory; Wiley-Interscience: New York, NY, USA, 1998. [Google Scholar]
- Wang, S.; Li, Z.; Wang, Y.; Zhang, Q. Machine Learning Methods to Predict Social Media Disaster Rumor Refuters. Int. J.Environ. Res. Public Health 2019, 16, 1452. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hwang, S.; Jeong, M.K.; Yum, B. Robust Relevance Vector Machine With Variational Inference for Improving Virtual Metrology Accuracy. Ieee Trans. Semicond. Manuf. 2014, 27, 83–94. [Google Scholar] [CrossRef]
- Bai, L.; Wang, J.; Ma, X.; Lu, H. Air Pollution Forecasts: An Overview. Int. J.Environ. Res. Public Health 2018, 15, 780. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Liu, Y.; Yu, Y.; Yan, W. A Prediction of Precipitation Data Based on Support Vector Machine and Particle Swarm Optimization (PSO-SVM) Algorithms. Algorithms 2017, 10, 57. [Google Scholar] [CrossRef]
- Kuhn, H.T. A in Proceedings of the 2nd Berkeley Symposium on Mathematical Statistics and Probability; University of California Press: Berkeley, CA, USA, 1950. [Google Scholar]
- Ballanti, L.; Blesius, L.; Hines, E.; Kruse, B. Tree Species Classification Using Hyperspectral Imagery: A Comparison of Two Classifiers. Remote Sens. 2016, 8, 445. [Google Scholar] [CrossRef] [Green Version]
- Cheong, S.; Oh, S.H.; Lee, S.Y. Supportvectormachineswith binary tree architecture formulti-class classification. Neural Inf. Process. Lett. Rev. 2004, 2, 47–51. [Google Scholar]
- Elbisy, M.S. Sea Wave Parameters Prediction by Support Vector Machine Using a Genetic Algorithm. J. Coast. Res. 2013, 31, 892–899. [Google Scholar] [CrossRef]
- Chen, J.-H.; Lin, J.-Z. Developing an SVM based risk hedging prediction model for construction material suppliers. Autom. Constr. 2010, 19, 702–708. [Google Scholar] [CrossRef]
- Zeng, D.; Wang, S.; Shen, Y.; Shi, C. A GA-based feature selection and parameter optimization for support tucker machine. Procedia Comput. Sci. 2017, 111, 17–23. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Zhang, Z.X.; Guo, H.Y. Research on Fault Diagnosis of Diesel Engine Based on PSO-SVM. In Proceedings of the 2014 International Conference on Industrial Engineering and Information Technology, Tianjin, China, 16–18 May 2014. [Google Scholar]
- Kennedy, J. Particle Swarm Optimization. In Encyclopedia of Machine Learning; Sammut, C., Webb, G.I., Eds.; Springer US: Boston, MA, USA, 2010; pp. 760–766. [Google Scholar]
- Liu, P.; Li, Q.; Bian, J.; Song, L.; Xiahou, X. Using Interpretative Structural Modeling to Identify Critical Success Factors for Safety Management in Subway Construction: A China Study. Int. J.Environ. Res. Public Health 2018, 15, 1359. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiahou, X.; Yuan, J.; Li, Q.; Skibniewski, M.J. Validating DFS concept in lifecycle subway projects in China based on incident case analysis and network analysis. J. Civ. Eng. Manag. 2018, 24, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Zhao, T.S.; Zhou, W.; Tang, J.J. Safety risk factors of metro tunnel construction in China: An integrated study with EFA and SEM. Saf. Sci. 2018, 105, 98–113. [Google Scholar] [CrossRef]
- Duan, S.X.; Sun, R. Study on the Influencing Factors of Urban Subway Engineering Construction Safety. Iop Conf. Ser. Mater. Sci. Eng. 2018, 371, 012061. [Google Scholar] [CrossRef]
- Wu, Y.Q.; Wang, K.; Zhang, L.-Z.; Peng, S.-H. Sand-layer collapse treatment: An engineering example from Qingdao Metro subway tunnel. J. Clean. Prod. 2018, 197, 19–24. [Google Scholar] [CrossRef]
- Ma, X.-F.; Feng, N.-N.; Wang, G.-B.; Fang, X. Study on Vibration Reduction Method for a Subway Station in Soft Ground. J. Shock Vib. 2017, 2017, 9. [Google Scholar] [CrossRef] [Green Version]
- Xiong, F.; Wu, J.; Xing, H. Effects of Pit Excavation on an Existing Subway Station and Preventive Measures. J. Perform. Constr. Facil. 2016, 30. [Google Scholar] [CrossRef]
- China. Guideline of Risk Management for Construction of Subway and Underground Works; China Architecture & Building Press: Beijing, China, 2007. [Google Scholar]
- Gu, S.-n.; Zhu, G.-q.; Zan, W.-x. Numerical Study on Transverse Temperature Distribution of Fire Zone in Metro Tunnel Fire. Procedia Eng. 2016, 135, 376–383. [Google Scholar] [CrossRef] [Green Version]
- Gambatese, J.A.; Behm, M.; Rajendran, S. Design’s role in construction accident causality and prevention: Perspectives from an expert panel. Saf. Sci. 2008, 46, 675–691. [Google Scholar] [CrossRef]
- China. Standard for Construction Safety Assessment of Metro Engineering; China Planning Press: Beijing, China, 2012. [Google Scholar]
- Ding, L.Y.; Yu, H.L.; Li, H.; Zhou, C.; Wu, X.G.; Yu, M.H. Safety risk identification system for metro construction on the basis of construction drawings. Autom. Constr. 2012, 27, 120–137. [Google Scholar] [CrossRef]
- Moon, H.; Dawood, N.; Kang, L. Development of workspace conflict visualization system using 4D object of work schedule. Adv. Eng. Inf. 2014, 28, 50–65. [Google Scholar] [CrossRef]
- Cong, C. Numerical analysis of influence of deep excavations on metro tunnel. In Proceedings of the 2016 International Conference on Civil, Transportation and Environment, Houston, TX, USA, 30–31 January 2016; Atlantis Press: Guangzhou, China, 2016. [Google Scholar]
- China. Code for Risk Management of Underground Works in Urban Rail Transit; Architecture & Building Press: Beijing, China, 2011. [Google Scholar]
- Huang, C.L.; Wang, C.J. A GA-based feature selection and parameters optimizationfor support vector machines. Expert Syst. Appl. 2006, 31, 231–240. [Google Scholar] [CrossRef]
- Mao, X. Research on the Collapse Risk Predication of Deep Excavation of Subway Station Based on SVM; Central South University: Changsha, China, 2013. [Google Scholar]
- García Nieto, P.J.; García-Gonzalo, E.; Sánchez Lasheras, F.; de Cos Juez, F.J. Hybrid PSO–SVM-based method for forecasting of the remaining useful life for aircraft engines and evaluation of its reliability. Reliab. Eng. Syst. Saf. 2015, 138, 219–231. [Google Scholar] [CrossRef]
- Zhou, Z.; Xiao, T.; Chen, X.; Wang, C. A carbon risk prediction model for Chinese heavy-polluting industrial enterprises based on support vector machine. Chaos Solitons Fractals 2016, 89, 304–315. [Google Scholar] [CrossRef]
- Li, R.; Shiliang, S.; Qifeng, N.; Hongping, Z.; Chuangqu, Z. Research on Pattern Recognition of Gas Explosion Disaster Risk in Coal Mines Based on PSO-SVM. China Saf. Sci. J. 2013, 23, 38–43. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country/Region | Code | Abbreviation |
|---|---|---|
| Mainland China | Standard for Construction Safety Assessment of Metro Engineering (GB50715-2011) | GB 50715 |
| Code for Risk Management of Underground Works in Urban Rail Transit (GB50652-2011) | GB 50652 | |
| Code for Construction Company Safety Management Criterion (GB50656-2011) | GB 50656 | |
| Standard for Construction Safety Inspection (JGJ59-2011) Administrative Regulations on Safety in Construction Project (Regulation No.393 of the State Council) | JGJ59 No.393 | |
| Hong Kong, China | Factories and Industrial Undertakings Ordinance (FIUO-Cap.59) | FIUO |
| Occupational Safety and Health Ordinance (OSHO-Cap.509) | OSHO | |
| Japan | Construction Occupational Health and Safety Management System (COHSMS) | COHSMS |
| Guidelines and COHSMS External System Evaluation | ||
| Singapore | The Factories (Building Operations and Work of Engineering Construction) Regulations | BOWES |
| Code of Practice for Safety Management System for Construction Worksites (Singapore standard CP79:1999) | CP79 |
| Dimensions | Factors | Descriptions | Sources |
|---|---|---|---|
| Dangerous source environment | C1 Distribution and water enrichment of aquifers | The uncertainty of aquifer distribution and water yield analysis brings hidden danger to the safe construction of a metro station. | GB 50652 GB 50715 [49,78,79] |
| C2 Poor geological distribution | During the metro construction, special soil and poor geological conditions may be encountered, which will have a great impact on the safety of construction. | GB 50652, GB 50715 [46,79] | |
| C3 Soft soil thickness | The soft soil thickness is the internal cause of deep foundation pit accidents, which will cause the large deformation and displacement of the deep foundation pit. | GB 50652 GB 50656 FIUO [78,80,81,82] | |
| Project design scheme | C4 Engineering design defects or errors | The quality of the designer determines the rationality of the design scheme and thus determines the size of the safety risk in the design results. | GB 50652 OSHO [83,84,85] |
| C5 Selection of construction method | Different station types have different construction methods. Improper selection of construction methods will cause construction safety risks. | GB 50652 GB 50715 CP79 [83,86,87,88] | |
| C6 Excavation depth of foundation pit | With the continuous increase of the excavation depth of the foundation pit, the environment, geology and hydrological conditions will become increasingly complicated. | GB 50652 GB 50715 OSHO [83,87] | |
| C7 Enclosure structure design | The design of the envelope structure is the temporary or permanent structure to resist the unfavorable external environment in the process developing underground space. | GB 50652 GB 50656 [83,89] | |
| C8 Support system design | The support system is the temporary structure which resists the internal or external deformation of the enclosure during the excavation of the foundation pit, which is one of the main causes of safety accidents. | GB 50652 JGJ59 [86,89,90] | |
| C9 Safety design handover | To allow the parties to learn the engineering design for the main idea, the design basis and the construction difficulties, the designer should submit the design documents. | GB 50652 GB 50656 [76,86,90] | |
| Construction scheme design | C10 Construction precipitation design | Groundwater is the most prominent influencing factor of engineering risk. Water-free operation of underground engineering is an important guarantee of construction safety. | JGJ59 No.393 Regulations GB50656 GB 50715 [83,86,90] |
| C11 Excavation scheme design | The construction safety risks caused by different excavation methods vary greatly. | GB 50656, GB 50715 COHSMS [83,86] | |
| C12 Monitoring and measuring scheme | Monitoring and measurement are performed to observe and analyze the change of rock and soil characters, the deformation of the supporting structure and the surrounding environment in excavation and underground construction. | GB 50656, GB 50715 BOWES [86,89,90] |
| Probability Class | Loss Level | |||||
|---|---|---|---|---|---|---|
| Disastrous (A) | Very Serious (B) | Serious (C) | Considerable (D) | Ignorable (E) | ||
| >0.1 | Frequent | I | I | I | II | III |
| 0.01–0.1 | Possible | I | I | II | III | III |
| 0.001–0.01 | Unmeant | I | II | III | III | IV |
| 0.0001–0.001 | Infrequent | II | III | III | IV | IV |
| <0.0001 | Impossible | III | III | IV | IV | IV |
| Measurement Score | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Soft soil thickness | 5 m | 4 m 5 m | 3 m 4 m | 2 m 3 m | 2 m |
| Measurement Score | Monitoring and Measuring Design Scheme |
|---|---|
| 1 | No monitoring and measurement design or serious non-compliance |
| 2 | Inconformity |
| 3 | Basically consistent |
| 4 | More consistent |
| 5 | Fully consistent |
| Risk Category | Risk Level | |||
|---|---|---|---|---|
| I | II | III | IV | |
| Instability and failure of foundation pit | 10 | 21 | 29 | 8 |
| Sample | Influence Factor | Risk Level | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | C9 | C10 | C11 | C12 | ||
| 1 | 4 | 3 | 5 | 3 | 4 | 4 | 5 | 3 | 3 | 4 | 4 | 4 | III |
| 2 | 2 | 1 | 2 | 2 | 4 | 1 | 3 | 3 | 2 | 3 | 3 | 3 | II |
| 3 | 5 | 4 | 4 | 4 | 5 | 4 | 5 | 5 | 4 | 5 | 5 | 5 | IV |
| 4 | 4 | 3 | 3 | 3 | 4 | 4 | 5 | 3 | 3 | 4 | 4 | 5 | III |
| 5 | 3 | 3 | 1 | 4 | 4 | 2 | 4 | 3 | 3 | 3 | 4 | 2 | II |
| 6 | 1 | 1 | 2 | 4 | 4 | 2 | 3 | 4 | 2 | 2 | 3 | 3 | I |
| 7 | 3 | 1 | 3 | 3 | 4 | 2 | 3 | 3 | 4 | 2 | 5 | 2 | II |
| 8 | 4 | 3 | 5 | 4 | 5 | 4 | 4 | 4 | 4 | 4 | 5 | 4 | III |
| 9 | 2 | 2 | 2 | 4 | 4 | 1 | 4 | 2 | 2 | 1 | 4 | 2 | I |
| 10 | 2 | 1 | 1 | 4 | 3 | 2 | 3 | 3 | 4 | 2 | 5 | 3 | II |
| 11 | 4 | 2 | 4 | 4 | 5 | 3 | 4 | 4 | 4 | 4 | 5 | 4 | III |
| 12 | 4 | 5 | 5 | 4 | 5 | 4 | 5 | 5 | 4 | 5 | 5 | 4 | IV |
| 13 | 4 | 1 | 1 | 2 | 3 | 3 | 3 | 4 | 2 | 1 | 3 | 3 | II |
| 14 | 4 | 3 | 4 | 3 | 4 | 5 | 4 | 3 | 4 | 4 | 5 | 5 | III |
| 15 | 3 | 4 | 4 | 4 | 5 | 2 | 3 | 4 | 3 | 3 | 5 | 3 | III |
| 16 | 3 | 1 | 1 | 2 | 3 | 1 | 2 | 3 | 3 | 1 | 3 | 1 | I |
| 17 | 2 | 2 | 1 | 4 | 4 | 2 | 3 | 5 | 3 | 3 | 4 | 3 | II |
| 18 | 2 | 1 | 2 | 3 | 4 | 2 | 3 | 2 | 3 | 2 | 3 | 3 | II |
| 19 | 1 | 2 | 1 | 3 | 3 | 2 | 3 | 3 | 1 | 2 | 3 | 1 | I |
| 20 | 2 | 3 | 2 | 4 | 3 | 1 | 4 | 4 | 3 | 2 | 3 | 4 | III |
| 21 | 1 | 1 | 2 | 4 | 3 | 1 | 3 | 3 | 2 | 2 | 3 | 2 | I |
| 22 | 3 | 2 | 3 | 3 | 3 | 1 | 4 | 4 | 3 | 2 | 3 | 4 | II |
| 23 | 5 | 4 | 4 | 5 | 5 | 3 | 5 | 4 | 5 | 4 | 5 | 5 | IV |
| 24 | 3 | 3 | 4 | 5 | 5 | 3 | 4 | 3 | 4 | 5 | 5 | 4 | III |
| 25 | 2 | 2 | 1 | 3 | 4 | 2 | 4 | 4 | 3 | 3 | 4 | 3 | II |
| 26 | 2 | 1 | 1 | 4 | 4 | 3 | 4 | 3 | 3 | 3 | 4 | 3 | II |
| 27 | 2 | 4 | 3 | 4 | 5 | 4 | 5 | 5 | 4 | 4 | 5 | 5 | III |
| 28 | 3 | 4 | 4 | 4 | 5 | 4 | 3 | 4 | 5 | 3 | 4 | 5 | III |
| 29 | 3 | 1 | 2 | 3 | 3 | 1 | 4 | 4 | 3 | 2 | 5 | 4 | II |
| 30 | 3 | 4 | 3 | 5 | 5 | 3 | 3 | 4 | 3 | 4 | 5 | 4 | III |
| 31 | 2 | 1 | 2 | 2 | 4 | 1 | 3 | 4 | 3 | 2 | 3 | 3 | I |
| 32 | 3 | 1 | 3 | 3 | 3 | 1 | 4 | 4 | 4 | 1 | 3 | 4 | II |
| 33 | 5 | 5 | 5 | 4 | 5 | 4 | 5 | 5 | 4 | 5 | 5 | 4 | IV |
| 34 | 2 | 3 | 5 | 5 | 5 | 2 | 4 | 3 | 5 | 5 | 4 | 4 | III |
| 35 | 5 | 3 | 5 | 5 | 4 | 2 | 5 | 4 | 5 | 4 | 4 | 5 | III |
| 36 | 3 | 3 | 4 | 5 | 4 | 2 | 4 | 4 | 4 | 4 | 5 | 4 | III |
| 37 | 3 | 3 | 1 | 4 | 4 | 2 | 4 | 3 | 3 | 3 | 4 | 2 | II |
| 38 | 2 | 3 | 5 | 4 | 5 | 3 | 4 | 4 | 5 | 5 | 4 | 4 | III |
| 39 | 4 | 4 | 4 | 4 | 5 | 4 | 5 | 5 | 4 | 5 | 5 | 5 | IV |
| 40 | 2 | 2 | 1 | 3 | 4 | 2 | 4 | 4 | 3 | 3 | 4 | 3 | II |
| 41 | 3 | 3 | 4 | 4 | 4 | 2 | 5 | 4 | 4 | 3 | 5 | 5 | III |
| 42 | 2 | 2 | 1 | 4 | 4 | 3 | 4 | 3 | 3 | 2 | 4 | 2 | II |
| 43 | 2 | 3 | 5 | 4 | 5 | 3 | 5 | 3 | 5 | 5 | 4 | 4 | III |
| 44 | 2 | 1 | 2 | 4 | 4 | 1 | 3 | 4 | 2 | 2 | 3 | 2 | I |
| 45 | 3 | 2 | 2 | 4 | 3 | 1 | 4 | 4 | 3 | 2 | 3 | 4 | II |
| 46 | 4 | 5 | 5 | 4 | 5 | 4 | 5 | 5 | 5 | 5 | 4 | 4 | IV |
| 47 | 2 | 1 | 2 | 4 | 4 | 1 | 3 | 4 | 2 | 2 | 4 | 2 | I |
| 48 | 4 | 5 | 5 | 4 | 5 | 4 | 5 | 5 | 4 | 5 | 5 | 5 | IV |
| 49 | 3 | 1 | 1 | 4 | 4 | 2 | 3 | 4 | 2 | 1 | 4 | 3 | II |
| 50 | 1 | 1 | 2 | 3 | 3 | 1 | 5 | 4 | 3 | 2 | 3 | 2 | II |
| 51 | 3 | 3 | 4 | 3 | 4 | 4 | 5 | 3 | 4 | 4 | 5 | 5 | III |
| 52 | 2 | 2 | 3 | 3 | 4 | 2 | 4 | 3 | 3 | 2 | 4 | 3 | I |
| 53 | 4 | 1 | 1 | 3 | 3 | 1 | 3 | 4 | 4 | 2 | 3 | 3 | II |
| 54 | 4 | 3 | 4 | 3 | 4 | 4 | 5 | 3 | 3 | 4 | 4 | 5 | III |
| 55 | 5 | 2 | 5 | 5 | 4 | 4 | 5 | 5 | 5 | 4 | 4 | 5 | III |
| 56 | 4 | 4 | 4 | 4 | 5 | 4 | 5 | 5 | 5 | 5 | 5 | 5 | IV |
| 57 | 3 | 3 | 4 | 5 | 5 | 3 | 4 | 3 | 4 | 5 | 5 | 4 | III |
| 58 | 1 | 2 | 2 | 4 | 3 | 1 | 4 | 4 | 3 | 2 | 3 | 4 | II |
| 59 | 3 | 3 | 4 | 4 | 4 | 2 | 3 | 4 | 4 | 3 | 4 | 4 | III |
| 60 | 4 | 3 | 4 | 3 | 5 | 3 | 4 | 3 | 3 | 5 | 4 | 4 | III |
| 61 | 4 | 4 | 3 | 3 | 4 | 3 | 5 | 3 | 3 | 5 | 4 | 5 | III |
| 62 | 2 | 1 | 2 | 3 | 3 | 1 | 2 | 4 | 2 | 3 | 3 | 3 | I |
| 63 | 2 | 3 | 1 | 4 | 4 | 2 | 4 | 3 | 3 | 3 | 4 | 2 | III |
| 64 | 3 | 3 | 3 | 5 | 5 | 2 | 3 | 5 | 3 | 4 | 5 | 4 | III |
| 65 | 2 | 2 | 2 | 3 | 3 | 1 | 4 | 4 | 3 | 2 | 3 | 3 | II |
| 66 | 2 | 3 | 5 | 5 | 5 | 3 | 4 | 3 | 5 | 5 | 4 | 4 | III |
| 67 | 5 | 4 | 5 | 4 | 5 | 4 | 5 | 5 | 5 | 5 | 4 | 4 | IV |
| 68 | 4 | 3 | 4 | 5 | 4 | 3 | 4 | 4 | 5 | 4 | 5 | 5 | III |
| Factor | C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | C9 | C10 | C11 | C12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Quantitative results | 3 | 2 | 4 | 4 | 4 | 1 | 3 | 4 | 4 | 2 | 4 | 3 |
| Random Number (RN) | RN 1 | RN 2 | RN 3 | RN 4 | RN 5 | RN 6 | RN 7 | RN 8 | RN 9 | RN 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Training sets | 92.98% | 89.47% | 94.74% | 85.97% | 89.47% | 91.22% | 94.74% | 91.22% | 89.47% | 94.74% |
| Test sets | 81.82% | 90.91% | 71.73% | 90.91% | 100.00% | 81.82% | 90.91% | 71.73% | 81.82% | 90.91% |
| Risk level | II | II | II | II | II | II | II | III | II | II |
| Influence Factor | Quantitative Result Adjustment | The Risk Level of Foundation Pit Instability and Failure |
|---|---|---|
| C2 | 3 (+1) | II |
| 4 (+2) | III | |
| C6 | 2 (+1) | II |
| 3 (+2) | II | |
| C10 | 3 (+1) | III |
| Influence Factor | Quantitative Result Adjustment | Foundation Pit Instability and Failure Risk Level |
|---|---|---|
| C2 + C6 | C2 (+1) = 3 + C6 (+1) = 2 | II |
| C2 (+2) = 4 + C6 (+1) = 3 | III | |
| C2 + C10 | C2 (+1) = 3 + C10 (+1) = 3 | III |
| C2 (+2) = 4 + C10 (+2) = 4 | III | |
| C6 + C10 | C6 (+1) = 2 + C10 (+1) = 3 | III |
| C6 (+2) = 3 + C10 (+2) = 4 | III |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Xie, M.; Bian, J.; Li, H.; Song, L. A Hybrid PSO–SVM Model Based on Safety Risk Prediction for the Design Process in Metro Station Construction. Int. J. Environ. Res. Public Health 2020, 17, 1714. https://doi.org/10.3390/ijerph17051714
Liu P, Xie M, Bian J, Li H, Song L. A Hybrid PSO–SVM Model Based on Safety Risk Prediction for the Design Process in Metro Station Construction. International Journal of Environmental Research and Public Health. 2020; 17(5):1714. https://doi.org/10.3390/ijerph17051714
Chicago/Turabian StyleLiu, Ping, Mengchu Xie, Jing Bian, Huishan Li, and Liangliang Song. 2020. "A Hybrid PSO–SVM Model Based on Safety Risk Prediction for the Design Process in Metro Station Construction" International Journal of Environmental Research and Public Health 17, no. 5: 1714. https://doi.org/10.3390/ijerph17051714
APA StyleLiu, P., Xie, M., Bian, J., Li, H., & Song, L. (2020). A Hybrid PSO–SVM Model Based on Safety Risk Prediction for the Design Process in Metro Station Construction. International Journal of Environmental Research and Public Health, 17(5), 1714. https://doi.org/10.3390/ijerph17051714