Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks



Abstract
:1. Introduction
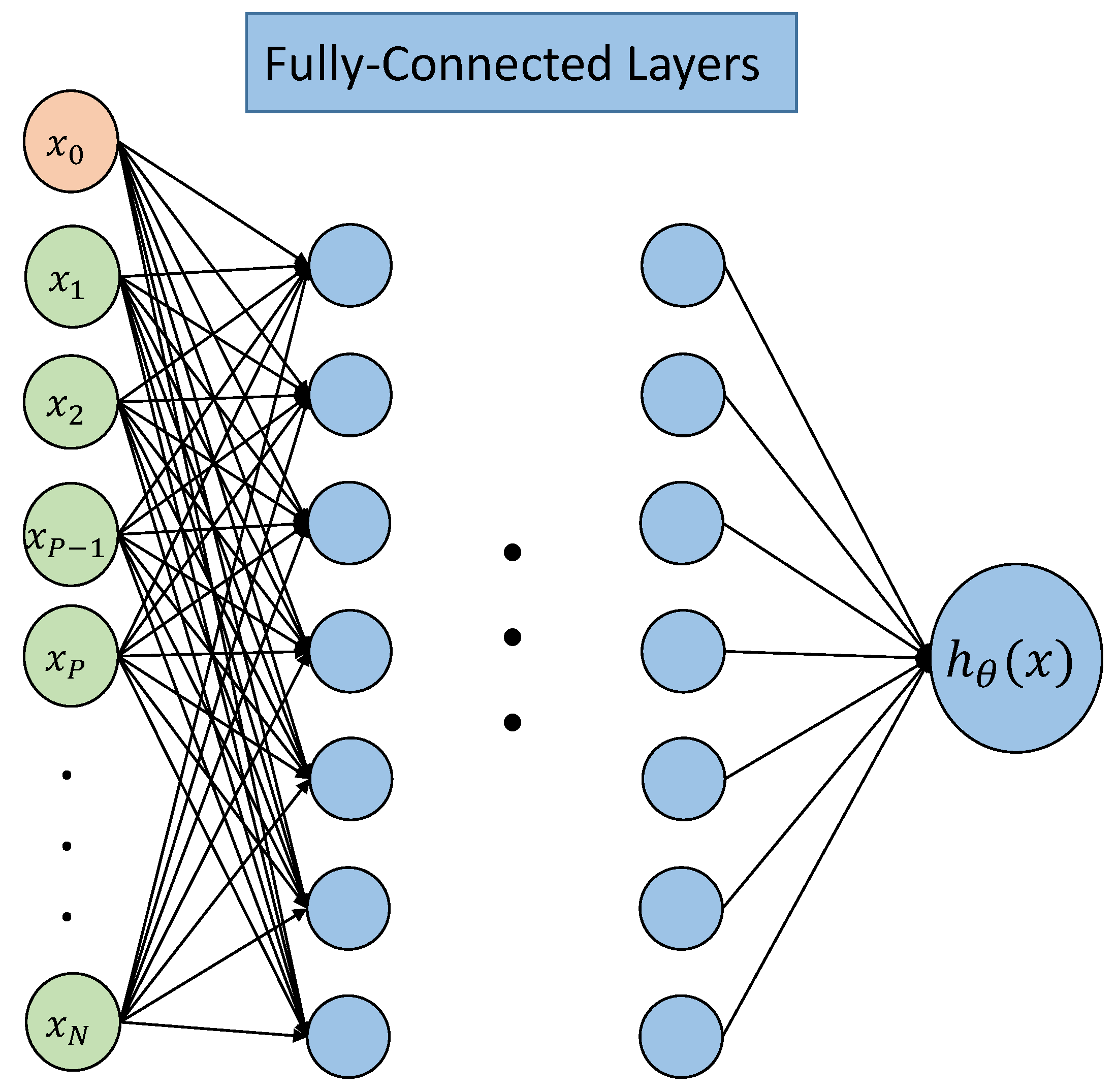
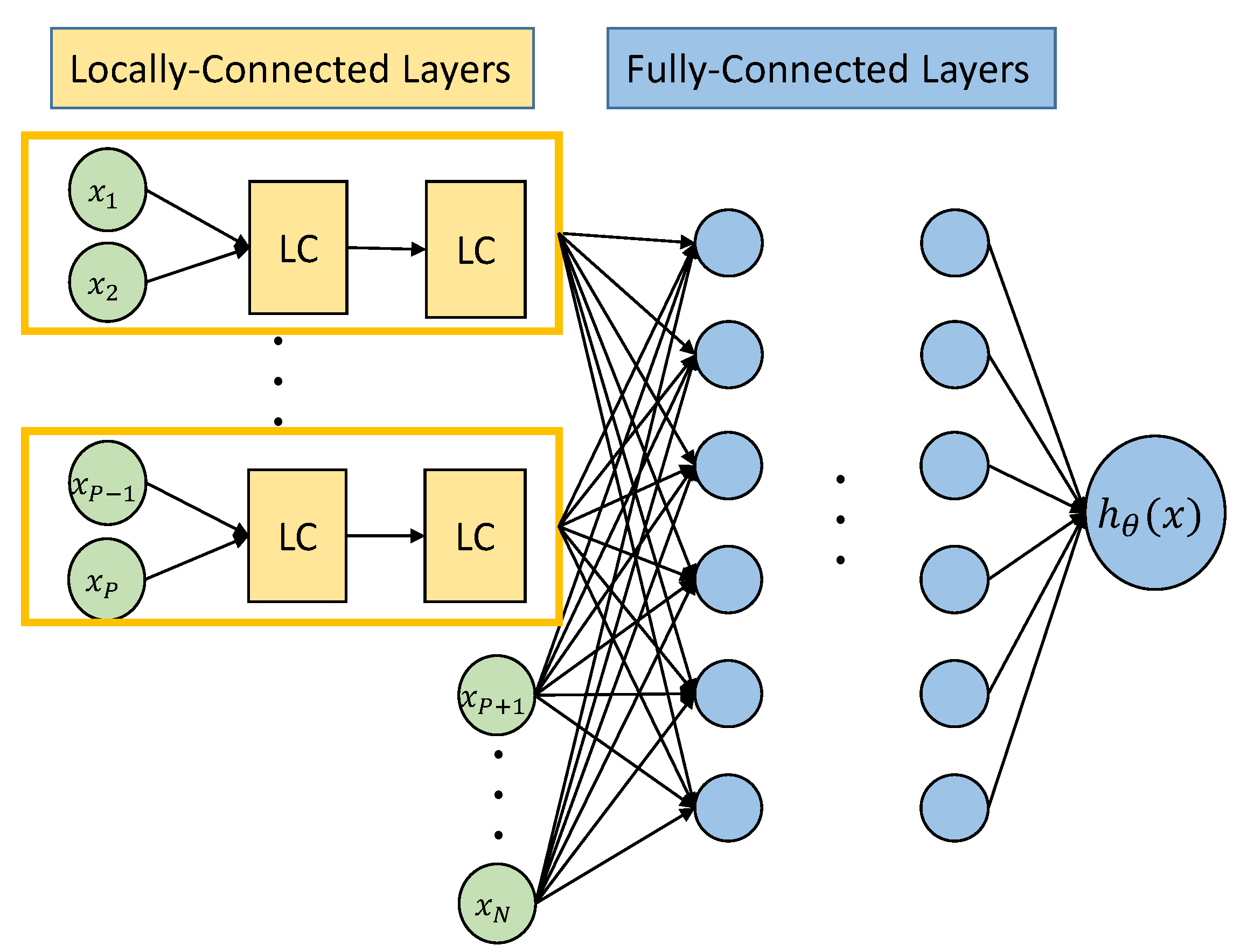
- We propose a new hybrid ANN model, and compare its performance with conventional fully-connected ANN in reconstructing EMF exposure. In order to make better use of key inputs of ANN, including distance to the source, direction of the transmitting antennas, blockage in the surrounding environment, time variation and background noise, we propose a hybrid ANN. The idea is to process information from one BSA locally, then concentrate the data from different BSA together.
- We propose a new reconstruction method based on the one-time drive testing with the help of sensor networks. We compare its performance against the reconstruction method based on sensor networks only. The new reconstruction method has the advantage of achieving good predictions with lower cost.
2. System Model
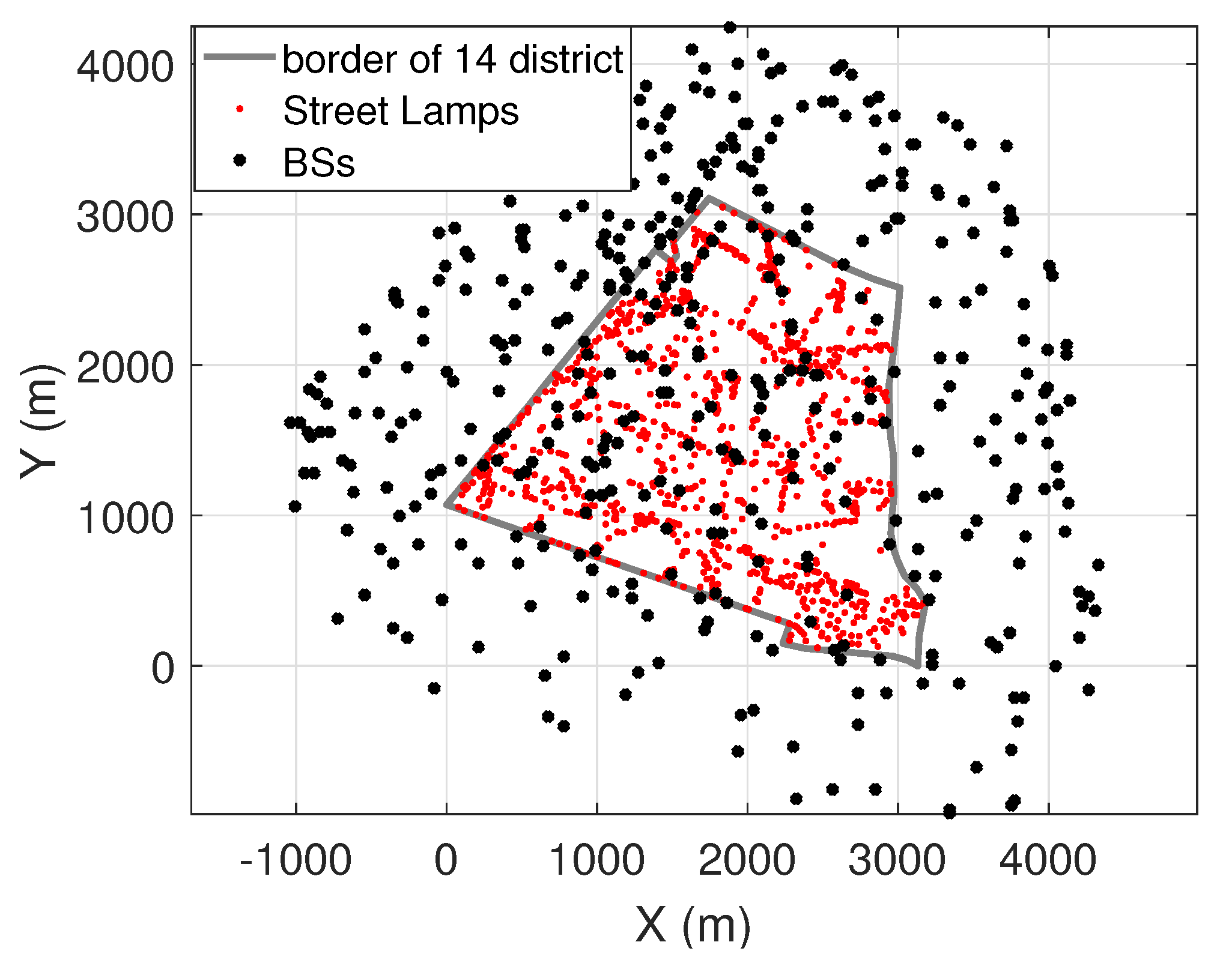
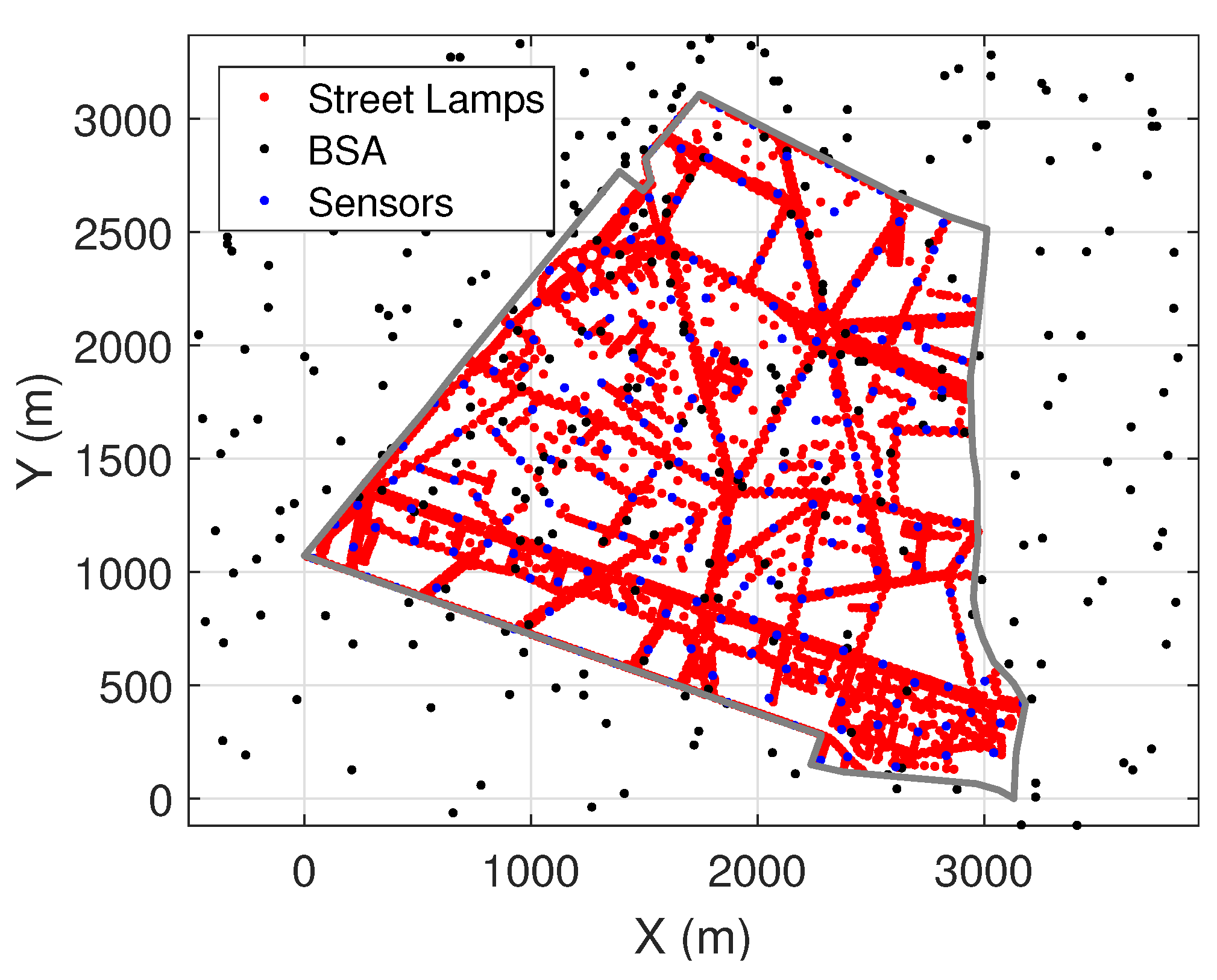
2.1. Exposure Reference Map Construction and Setting
- -
- the direction of each antenna is uniformly distributed;
- -
- the transmit power for each BSA is equal.
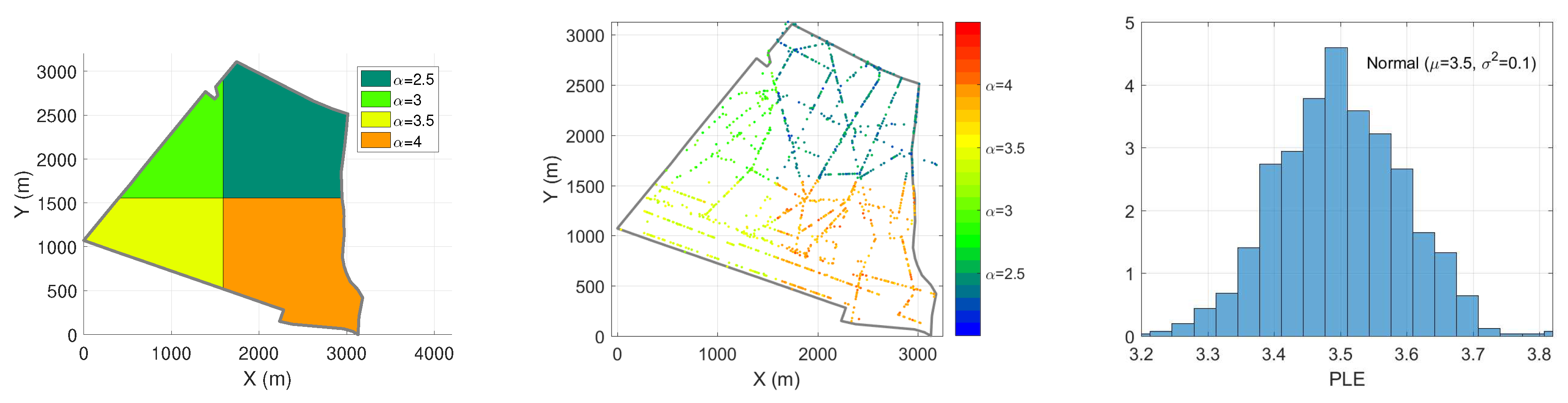
2.2. Parametric Exposure Reference Map
Stochastic Block-Based Path Loss Model
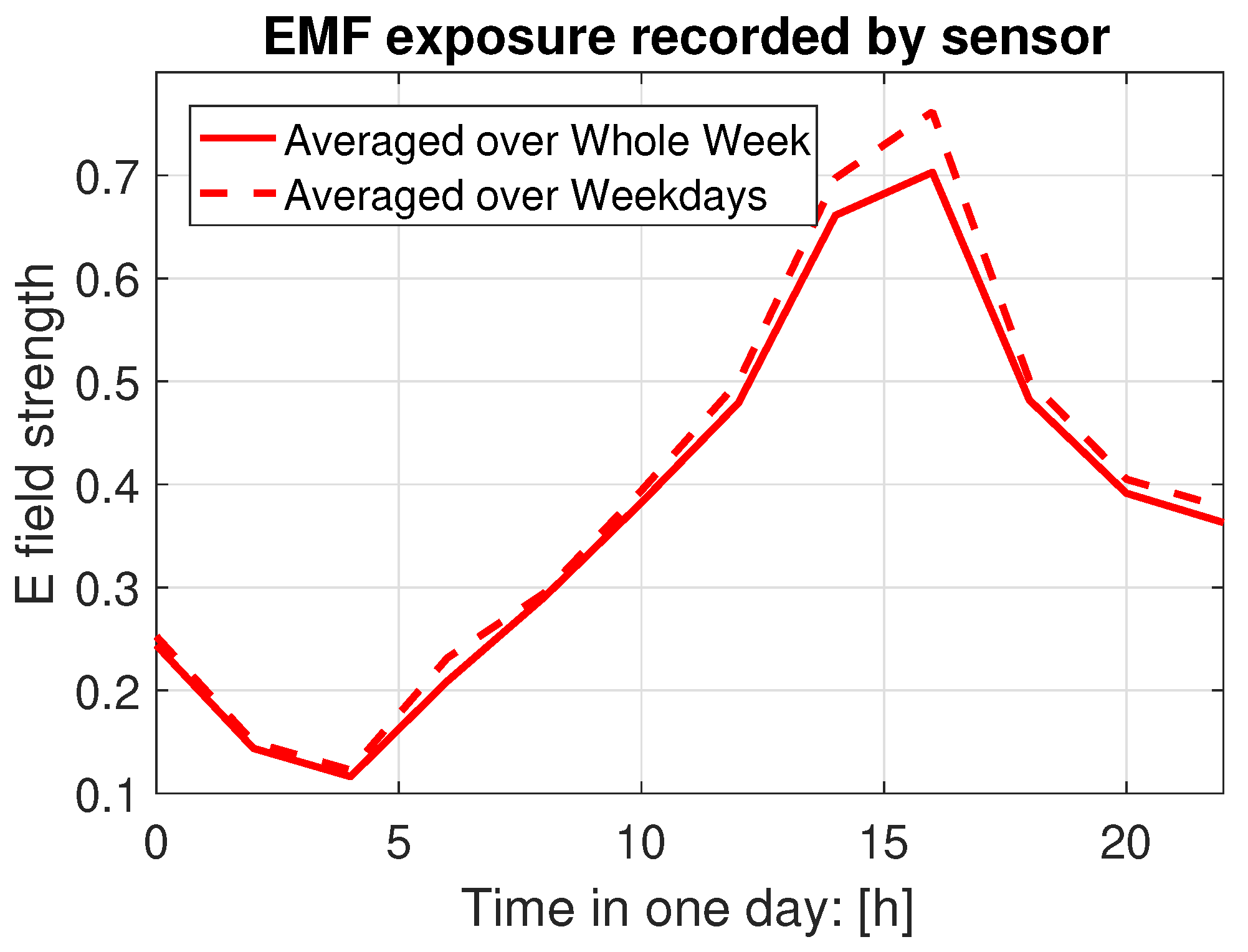
2.3. Time Variation
2.4. Adding Noise to Exposure
3. Regression Neural Network Set Up
Tuning Hyper-Parameters
4. New Hybrid-Connected Neural Networks
5. Reconstruction Methods
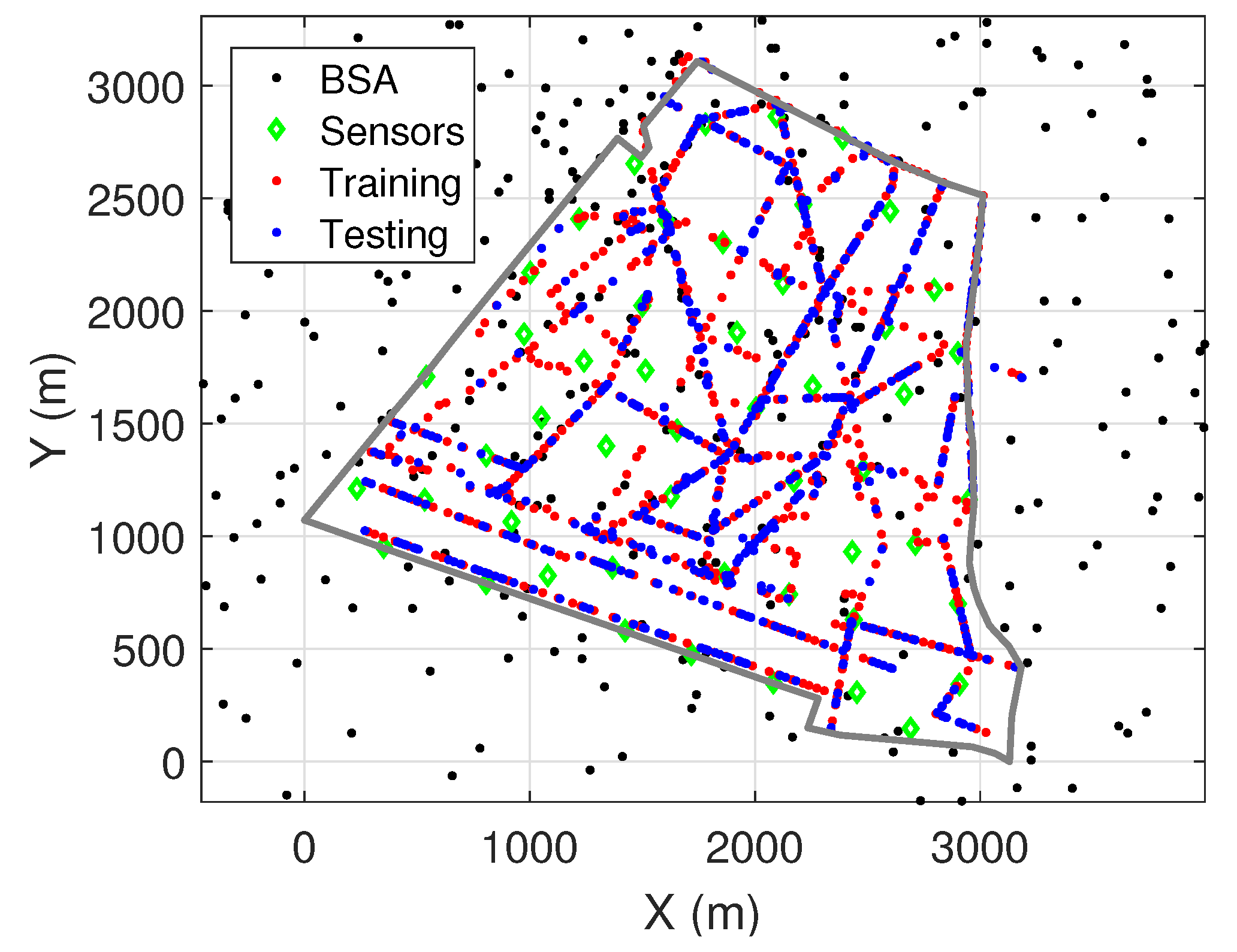
5.1. Case 1: Through Sensor Networks
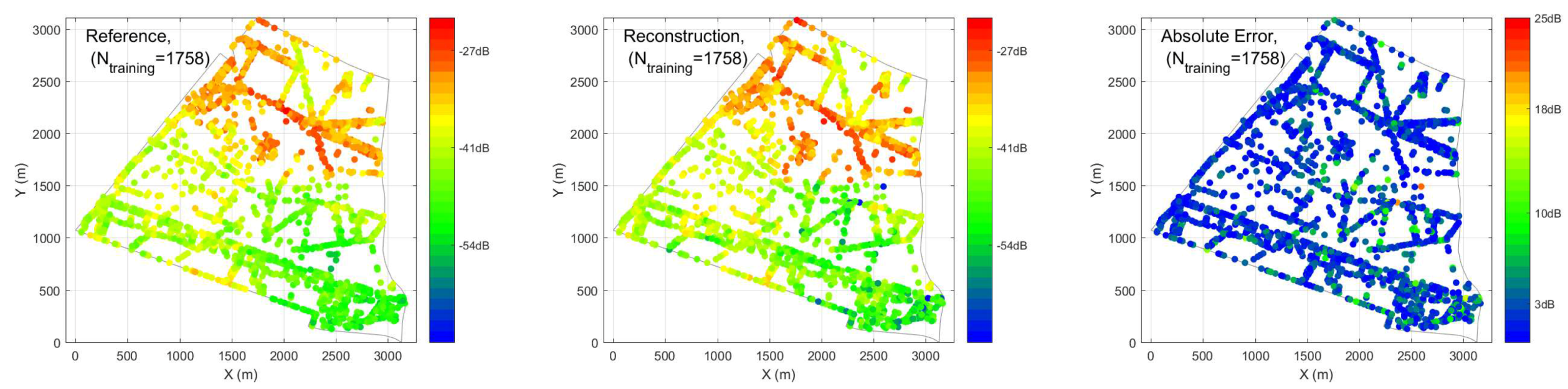
5.2. Case 2: Through Combined Drive Testing and Sensor Networks
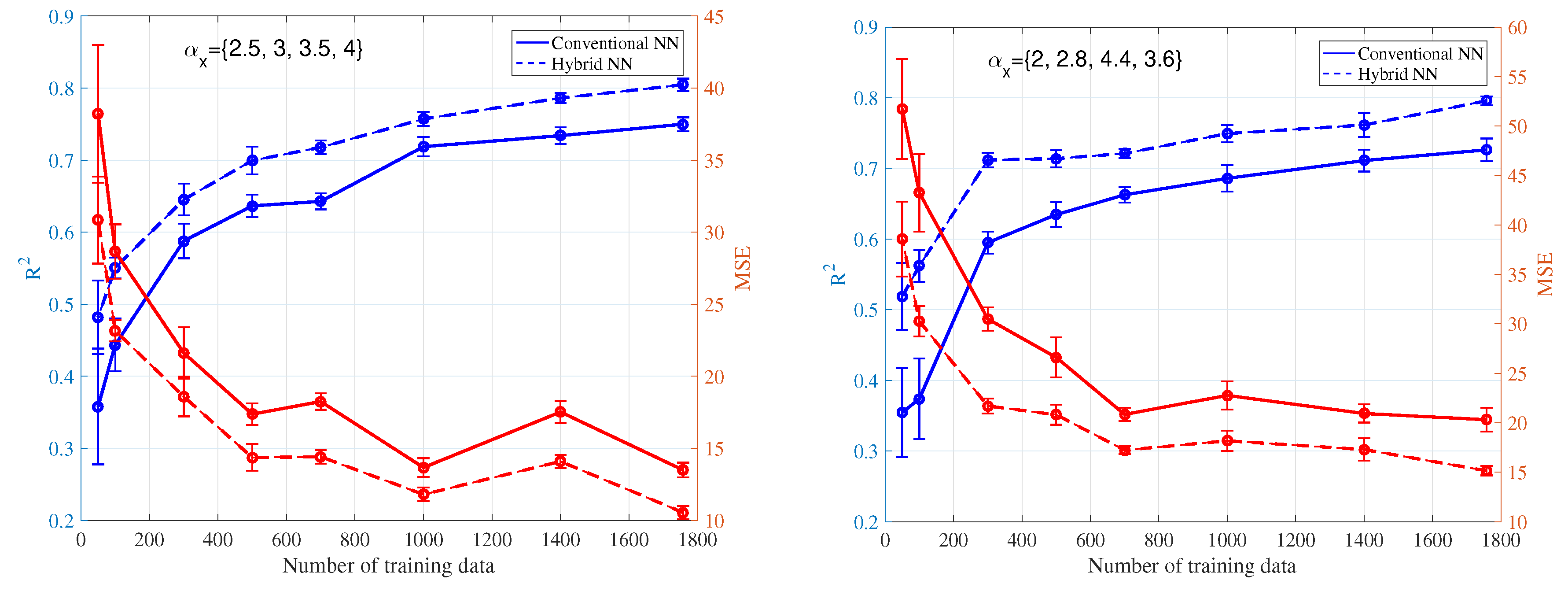
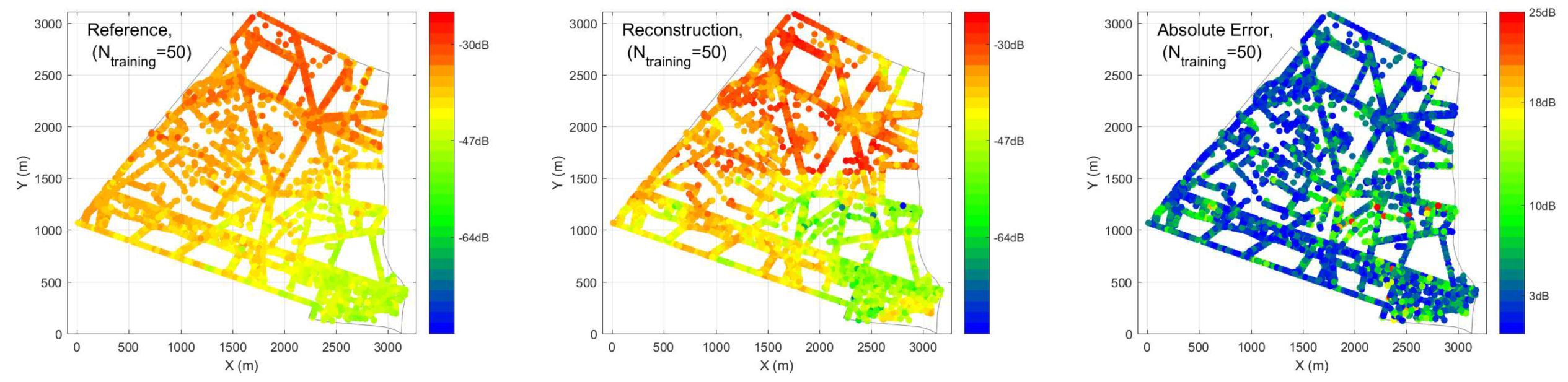
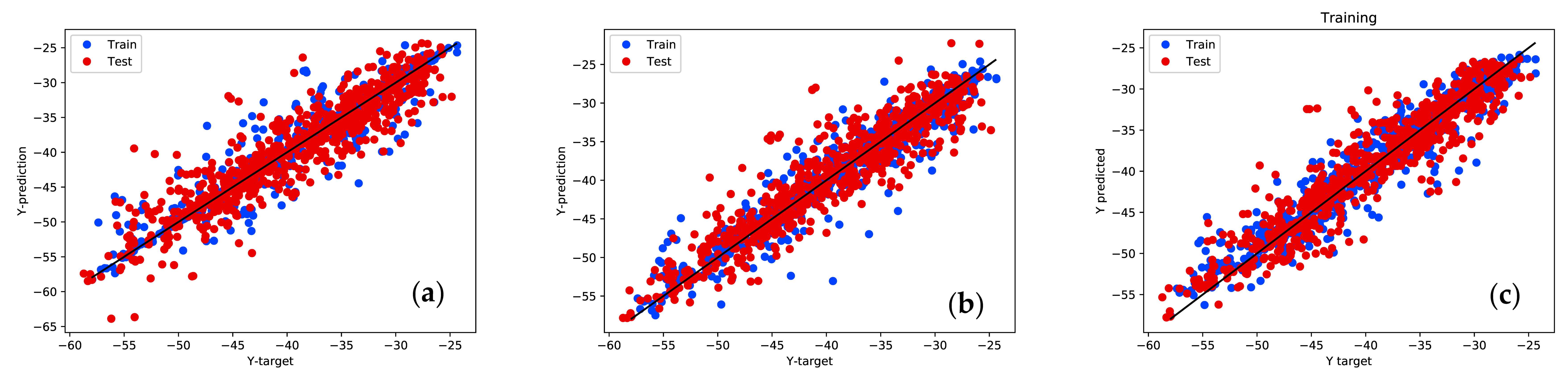
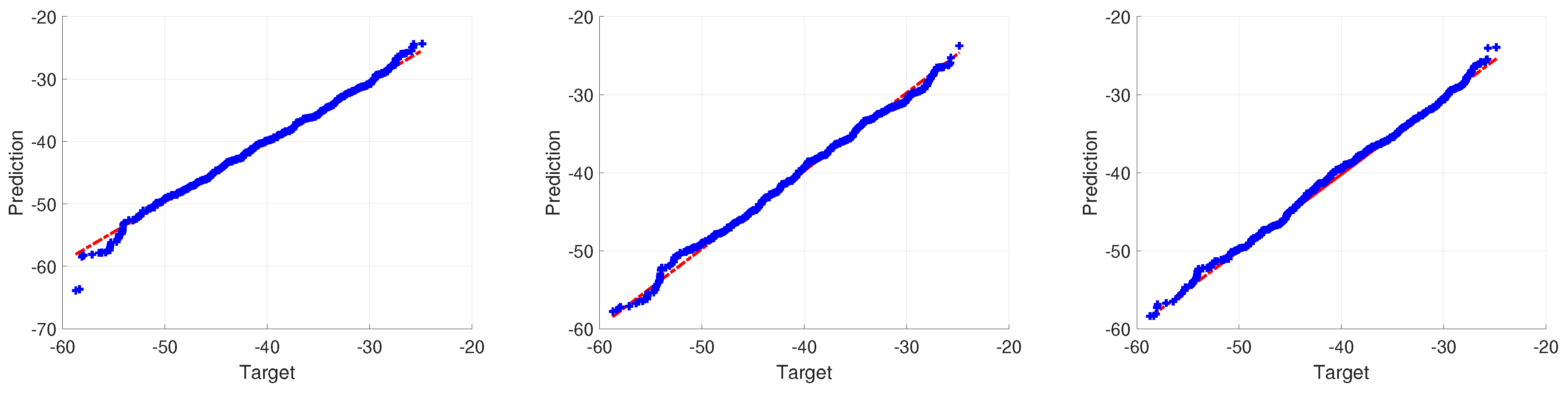
6. Results
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AI | Artificial Intelligence |
| ANN | Artificial Neural Network |
| AWGN | Added White Gaussian Noise |
| BSA | Base Station Antennas |
| EEM | EMF Exposure Map |
| EMF | Electromagnetic Field |
| ERM | Exposure Reference Map |
| FC | Fully-Connected |
| LC | Locally-Connected |
| LoS | Line-of-Sight |
| MSE | Mean Square Errors |
| NLoS | Non Line-of-Sight |
| PL | Path Loss |
| PLE | Path Loss Exponent |
| Q-Q Plot | Quantile-to-Quantile Plot |
| reLU | Refined Linear Unit |
| RF | Radiofrequency |
| RSS | Residual Sum of Squares |
| STD | Standard Deviation |
References
- Electromagetic Fields Report. Available online: https://ec.europa.eu/commfrontoffice/publicopinion/archives/ebs/ebs_347_en.pdf (accessed on 25 April 2020).
- Wiart, J. Radio-Frequency Human Exposure Assessment: From Deterministic to Stochastic Methods; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Etude de l’exposition du Public aux Ondes Radioélectriques. Available online: https://www.anfr.fr/fileadmin/mediatheque/documents/expace/20180919-Analyse-mesures-2017.pdf (accessed on 25 April 2020).
- Gajšek, P.; Ravazzani, P.; Wiart, J.; Grellier, J.; Samaras, T.; Thuróczy, G. Electromagnetic field exposure assessment in Europe radiofrequency fields (10 MHz–6 GHz). J. Expo. Sci. Environ. Epidemiol. 2015, 25, 37–44. [Google Scholar]
- Tesanovic, M.; Conil, E.; De Domenico, A.; Aguero, R.; Freudenstein, F.; Correia, L.M.; Bories, S.; Martens, L.; Wiedemann, P.M.; Wiart, J. The LEXNET project: Wireless networks and EMF: Paving the way for low-EMF networks of the future. IEEE Veh. Technol. Mag. 2014, 9, 20–28. [Google Scholar]
- Diez, L.; Agüero, R.; Muñoz, L. Electromagnetic Field Assessment as a Smart City Service: The Smartsantander Use-Case. Sensors 2017, 17, 1250. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Philippe, P.; Pascal, T.; Yannick, P.; Lamine, O. Observatoire des Ondes, une Réponse au Débat Sociétal EMF Observatory, an Answer to the Societal Debate. JS URSI France. 2020. Available online: https://ursifr-2020.sciencesconf.org/305807/document (accessed on 25 April 2020).
- Observatoire des Ondes. Available online: https://observatoiredesondes.fr/ (accessed on 25 April 2020).
- Huang, Y.; Wiart, J. Simplified assessment method for population RF exposure induced by a 4G network. IEEE J. Electromagn. Microwaves Med. Biol. 2017, 34–40. [Google Scholar] [CrossRef]
- Joshi, P.; Colombi, D.; Thors, B.; Larsson, L.E.; Törnevik, C. Output power levels of 4G user equipment and implications on realistic RF EMF exposure assessments. IEEE Access 2017, 5, 4545–4550. [Google Scholar] [CrossRef]
- Aerts, S.; Deschrijver, D.; Verloock, L.; Dhaene, T.; Martens, L.; Joseph, W. Assessment of outdoor radiofrequency electromagnetic field exposure through hotspot localization using kriging-based sequential sampling. Environ. Res. 2013, 126, 184–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lemaire, T.; Wiart, J.; De Doncker, P. Variographic Analysis of Public Exposure to Electromagnetic Radiation Due to Cellular base Stations. Bioelectromagnetics 2016, 37, 557–562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prachi, K.N.; Matta, G. Artificial neural network applications in air quality monitoring and management. Int. J. Environ. Rehabil. Conserv. 2011, 2, 30–64. [Google Scholar]
- Singh, K.P.; Basant, A.; Malik, A.; Jain, G. Artificial neural network modeling of the river water quality—A case study. Ecol. Model. 2009, 220, 888–895. [Google Scholar] [CrossRef]
- Rozenblit, O.; Haddad, Y.; Mirsky, Y.; Azoulay, R. Machine learning methods for SIR prediction in cellular networks. Phys. Commun. 2018, 31, 239–253. [Google Scholar] [CrossRef]
- Zappone, A.; Di Renzo, M.; Debbah, M.; Lam, T.T.; Qian, X. Model-aided wireless artificial intelligence: Embedding expert knowledge in deep neural networks for wireless system optimization. IEEE Veh. Technol. Mag. 2019, 14, 60–69. [Google Scholar] [CrossRef]
- Ostlin, E.; Zepernick, H.-J.; Suzuki, H. Macrocell path-loss prediction using artificial neural networks. IEEE Trans. Veh. Technol. 2010, 59, 2735–2747. [Google Scholar] [CrossRef] [Green Version]
- Popoola, S.I.; Adetiba, E.; Atayero, A.a.; Faruk, N.; Calafate, C.T. Optimal model for path loss predictions using feed-forward neural networks. Cogent Eng. 2018, 5, 1444345. [Google Scholar] [CrossRef]
- Mom, J.M.; Mgbe, C.O.; Igwue, G.A. Application of artificial neural network for path loss prediction in urban macrocellular environment. Am. J. Eng. Res. 2014, 3, 270–275. [Google Scholar]
- Aerts, S.; Huang, Y.; Martens, L.; Joseph, W.; Wiart, J. Use of artificial intelligence to model exposure to radiofrequency electromagnetic fields based on sensor network measurements. In Proceedings of the 4th Workshop on Uncertainty Modeling for Engineering Applications (UMEMA 2018), Split, Croatia, 10–11 December 2018. [Google Scholar]
- ANFR-Cartoradio. Available online: https://www.cartoradio.fr (accessed on 25 April 2020).
- Friis, H.T. A note on a simple transmission formula. Proc. IRE IEEE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Erceg, V.; Greenstein, L.J.; Tjandra, S.Y.; Parkoff, S.R.; Gupta, A.; Kulic, B.; Julius, A. A and Bianchi, Renee, An empirically based path loss model for wireless channels in suburban environments. IEEE J. Sel. Areas Commun. 1999, 17, 1205–1211. [Google Scholar] [CrossRef] [Green Version]
- Fu, B.; Bernáth, G.; Steichen, B.; Weber, S. Wireless background noise in the Wi-Fi spectrum. In Proceedings of the IEEE 4th International Conference on Wireless Communications, Networking and Mobile Computing, Dalian, China, 12–17 October 2008; pp. 1–7. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: Berlin, Germany, 2013. [Google Scholar]
- Bengio, Y. Practical Recommendations for Gradient-Based Training of Deep Architectures. Neural Networks: Tricks of the Trade; Springer: Berlin, Germany, 2012; pp. 437–478. [Google Scholar]
- Bazrafkan, S.; Javidnia, H.; Lemley, J.; Corcoran, P. Semi-Parallel Deep Neural Network (SPDNN) Hybrid Architecture, First Application on Depth from Monocular Camera. J. Electron. Imaging 2018. [Google Scholar] [CrossRef]
- CARRI Systems. Available online: https://www.carri.com (accessed on 25 April 2020).
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the 13th International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, 13–15 May 2010; pp. 249–256. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total number of sensors in case 1 | 3516 |
| Number of sensors selected in case 2 | 50 |
| Additive Noise level | SNR = 15dB |
| PLE in Block-based PL Model | and |
| in normal distribution | |
| , and in case 2 | 469, 201 and 670 |
| Hyper-Parameters | Conv.-Case 1 | Hybrid-Case 1 | Conv.-Case 2 | Hybrid-Case 2 |
|---|---|---|---|---|
| Pre-processing | Standardization | |||
| Num. of hidden layers | 4 | 2(LC), 1(FC) | 4 | 2(LC), 3(FC) |
| Num. of neurons | 50 | 20(LC), 30(FC) | 50 | 10(LC), 40(FC) |
| Learning rate | ||||
| Batch size | 10 | |||
| Patience in early stopping | 30 | |||
| Scenarios | Num. of Para. | MSE (±STD) | R (±STD) |
|---|---|---|---|
| Conventional ANN without considering sensors | 8851 | 11.2 (±0.91) | 0.81 (±0.02) |
| Conventional ANN considering sensors | 8951 | 9.2 (±0.73) | 0.85 (±0.01) |
| Hybrid ANN with considering sensors | 5431 | 7.9 (±1.06) | 0.87 (±0.02) |
| Conventional ANN without considering sensors with noise | 8851 | 16.3(±0.85) | 0.72 (±0.01) |
| Conventional ANN considering sensors with noise | 8951 | 14.6 (±0.76) | 0.75 (±0.01) |
| Hybrid ANN without considering sensors with noise | 5431 | 12.8 (±0.96) | 0.78 (±0.02) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Wiart, J. Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks. Int. J. Environ. Res. Public Health 2020, 17, 3052. https://doi.org/10.3390/ijerph17093052
Wang S, Wiart J. Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks. International Journal of Environmental Research and Public Health. 2020; 17(9):3052. https://doi.org/10.3390/ijerph17093052
Chicago/Turabian StyleWang, Shanshan, and Joe Wiart. 2020. "Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks" International Journal of Environmental Research and Public Health 17, no. 9: 3052. https://doi.org/10.3390/ijerph17093052
APA StyleWang, S., & Wiart, J. (2020). Sensor-Aided EMF Exposure Assessments in an Urban Environment Using Artificial Neural Networks. International Journal of Environmental Research and Public Health, 17(9), 3052. https://doi.org/10.3390/ijerph17093052