
A New Method for Evaluating Pelvic and Trunk Rotational Pitching Mechanics: From Qualitative to Quantitative Approaches


 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Procedures
2.3. Parameters
2.3.1. Parameters on the Timing of Events
2.3.2. Parameters of the Angle at the Time of Events
2.3.3. Parameters of Trunk–Pelvis Separation at the Time of Events
2.3.4. Parameters Associated with Special Time Events and Intervals
2.3.5. Parameters That Are Important during the Stride Phase
2.4. Statistical Analyses
3. Results
4. Discussion
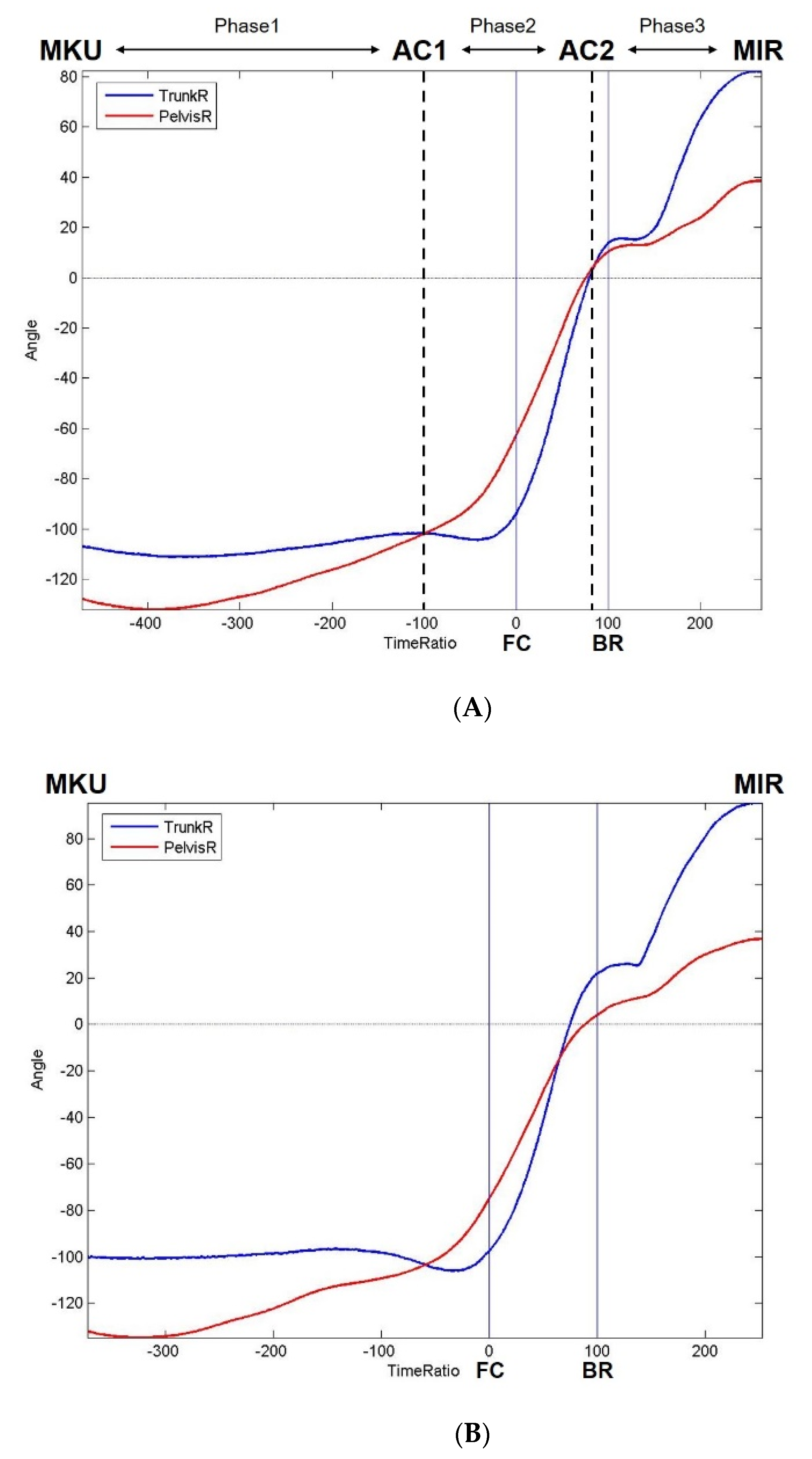
4.1. Three Novel Phases of Pelvic and Trunk Rotation during Pitching
4.1.1. Phase1
4.1.2. Phase2
4.1.3. Phase3
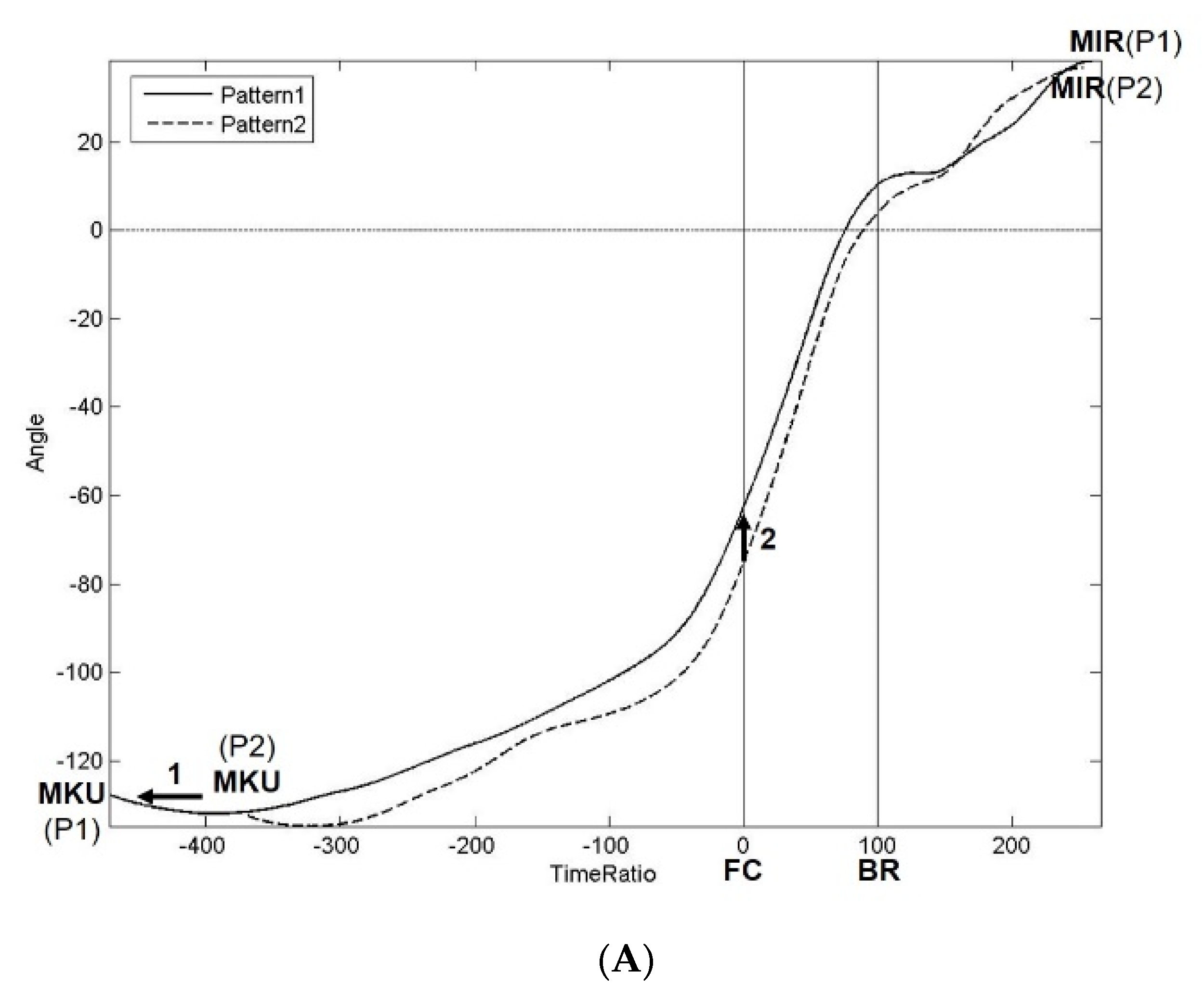
4.2. Characteristics of Pattern1 (Closed Hip-to-Shoulder Separation)
- (1)
- They rotate their trunks backwards following the pelvises in Phase1 (Figure 4B).
- (2)
- They commence rotation of their pelvises (backwards and then forwards) earlier in Phase1 (Figure 4A).
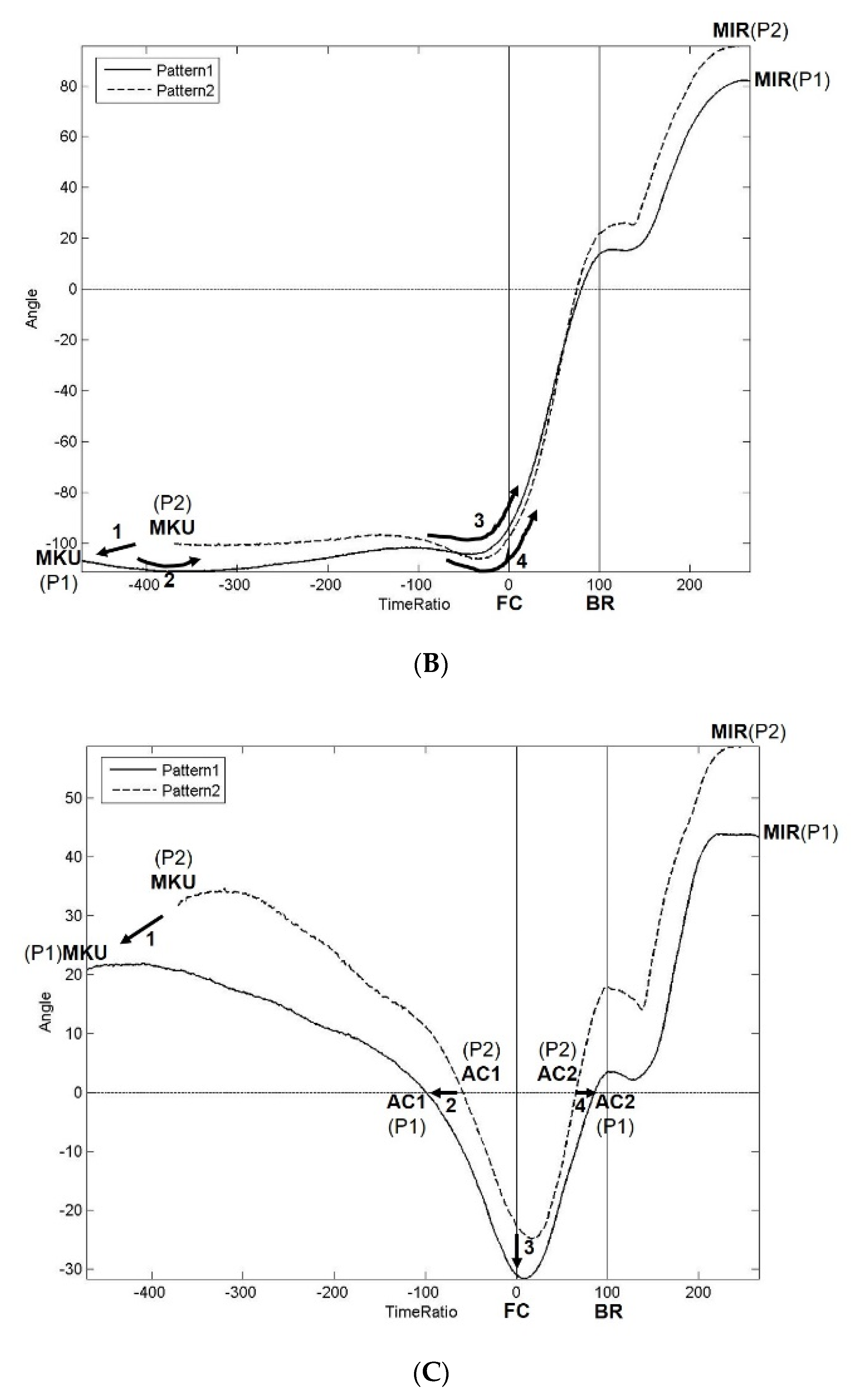
- (3)
- (4)
- They do not rotate their trunks backwards in Phase2 just before foot contact while pitchers in Pattern2 rotate their trunks backwards (Figure 4B).
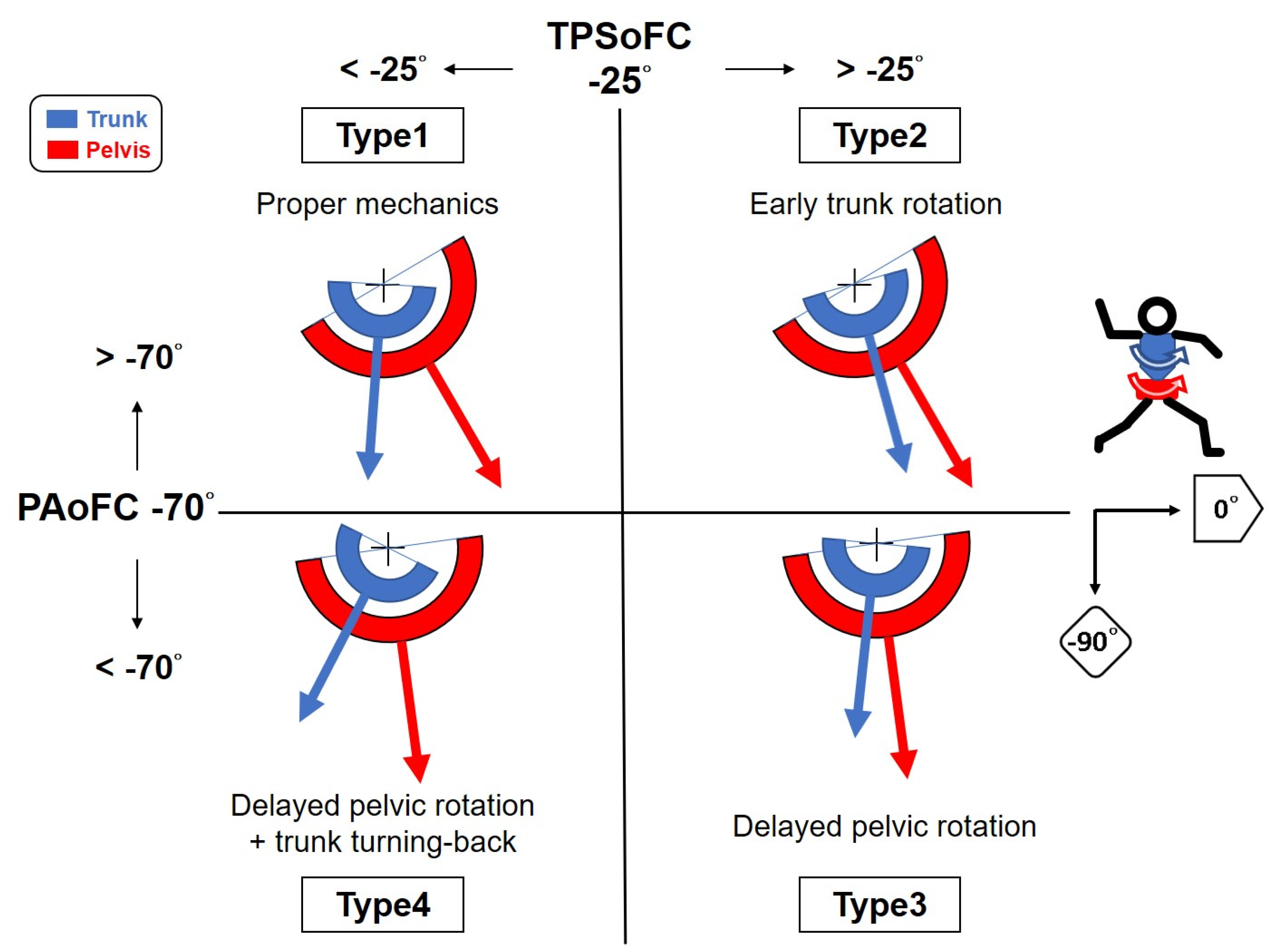
4.3. Evaluation of Pelvic and Trunk Rotational Mechanics Using “PAoFC” Accompanied by “TPSoFC”
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fleisig, G.; Chu, Y.; Weber, A.; Andrews, J. Variability in baseball pitching biomechanics among various levels of competition. Sports Biomech. 2009, 8, 10–21. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.T.; Su, F.C.; Nakamura, M.; Chao, E.Y.S. Complex chain of momentum transfer of body segments in the baseball pitching motion. J. Chin. Inst. Eng. 2003, 26, 861–868. [Google Scholar] [CrossRef]
- Whiteley, R. Baseball throwing mechanics as they relate to pathology and performance—A review. J. Sports Sci. Med. 2007, 6, 1–20. [Google Scholar] [PubMed]
- Seroyer, S.T.; Nho, S.J.; Bach, B.R.; Bush-Joseph, C.A.; Nicholson, G.P.; Romeo, A.A. The kinetic chain in overhand pitching: Its potential role for performance enhancement and injury prevention. Sports Health 2010, 2, 135–146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Davis, J.T.; Limpisvasti, O.; Fluhme, D.; Mohr, K.J.; Yocum, L.A.; Elattrache, N.S.; Jobe, F.W. The effect of pitching biomechanics on the upper extremity in youth and adolescent baseball pitchers. Am. J. Sports Med. 2009, 37, 1484–1491. [Google Scholar] [CrossRef]
- Escamilla, R.F.; Fleisig, G.S.; Groeschner, D.; Akizuki, K. Biomechanical Comparisons Among Fastball, Slider, Curveball, and Changeup Pitch Types and Between Balls and Strikes in Professional Baseball Pitchers. Am. J. Sports Med. 2017, 45, 3358–3367. [Google Scholar] [CrossRef]
- Guo, L.Y.; Lin, W.Y.; Tsai, Y.J.; Hou, Y.Y.; Chen, C.C.; Yang, C.H.; Huang, C.C.; Liu, Y.H. Different limb kinematic patterns during pitching movement between amateur and professional baseball players. J. Med. Biol. Eng. 2010, 30, 177–180. [Google Scholar]
- Lin, H.T.; Ko, H.T.; Lee, K.C.; Chen, Y.C.; Wang, D.C. The changes in shoulder rotation strength ratio for various shoulder positions and speeds in the scapular plane between baseball players and non-players. J. Phys. Ther. Sci. 2015, 27, 1559–1563. [Google Scholar] [CrossRef] [Green Version]
- Douoguih, W.A.; Dolce, D.L.; Lincoln, A.E. Early Cocking Phase Mechanics and Upper Extremity Surgery Risk in Starting Professional Baseball Pitchers. Orthop. J. Sports Med. 2015, 3. [Google Scholar] [CrossRef]
- Erickson, B.J.; Sgori, T.; Chalmers, P.N.; Vignona, P.; Lesniak, M.; Bush-Joseph, C.A.; Verma, N.N.; Romeo, A.A. The Impact of Fatigue on Baseball Pitching Mechanics in Adolescent Male Pitchers. Arthroscopy 2016, 32, 762–771. [Google Scholar] [CrossRef]
- Riff, A.J.; Chalmers, P.N.; Sgroi, T.; Lesniak, M.; Sayegh, E.; Verma, N.N.; Cole, B.J.; Romeo, A.A. Epidemiologic Comparison of Pitching Mechanics, Pitch Type, and Pitch Counts Among Healthy Pitchers at Various Levels of Youth Competition. Arthroscopy 2016, 32, 1559–1568. [Google Scholar] [CrossRef] [PubMed]
- Sgroi, T.; Chalmers, P.N.; Riff, A.J.; Lesniak, M.; Sayegh, E.; Wimmer, M.A.; Verma, N.N.; Cole, B.J.; Romeo, A.A. Predictors of throwing velocity in youth and adolescent pitchers. J. Shoulder Elbow Surg. 2015, 24, 1339–1345. [Google Scholar] [CrossRef] [PubMed]
- Luera, M.J.; Dowling, B.; Magrini, M.A.; Muddle, T.W.D.; Colquhoun, R.J.; Jenkins, N.D.M. Role of Rotational Kinematics in Minimizing Elbow Varus Torques for Professional Versus High School Pitchers. Orthop. J. Sports Med. 2018, 6. [Google Scholar] [CrossRef] [PubMed]
- Dun, S.; Fleisig, G.S.; Loftice, J.; Kingsley, D.; Andrews, J.R. The relationship between age and baseball pitching kinematics in professional baseball pitchers. J. Biomech. 2007, 40, 265–270. [Google Scholar] [CrossRef]
- Oi, T.; Yoshiya, S.; Slowik, J.; Diffendaffer, A.; Takagi, Y.; Tanaka, H.; Nobuhara, K.; Fleisig, G.S. Biomechanical Differences Between Japanese and American Professional Baseball Pitchers. Orthop. J. Sports Med. 2019, 7. [Google Scholar] [CrossRef] [Green Version]
- Fleisig, G.S.; Diffendaffer, A.Z.; Ivey, B.; Aune, K.T.; Laughlin, T.; Fortenbaugh, D.; Bolt, B.; Lucas, W.; Moore, K.D.; Dugas, J.R. Changes in Youth Baseball Pitching Biomechanics: A 7-Year Longitudinal Study. Am. J. Sports Med. 2018, 46, 44–51. [Google Scholar] [CrossRef]
- Nissen, C.W.; Westwell, M.; Ounpuu, S.; Patel, M.; Tate, J.P.; Pierz, K.; Burns, J.P.; Bicos, J. Adolescent baseball pitching technique: A detailed three-dimensional biomechanical analysis. Med. Sci. Sports Exerc. 2007, 39, 1347–1357. [Google Scholar] [CrossRef]
- Kageyama, M.; Sugiyama, T.; Kanehisa, H.; Maeda, A. Difference between adolescent and collegiate baseball pitchers in the kinematics and kinetics of the lower limbs and trunk during pitching motion. J. Sports Sci. Med. 2015, 14, 246–255. [Google Scholar]
- Chou, P.P.; Huang, Y.P.; Gu, Y.H.; Liu, C.; Chen, S.K.; Hsu, K.C.; Wang, R.T.; Huang, M.J.; Lin, H.T. Change in pitching biomechanics in the late-inning in Taiwanese high school baseball pitchers. J. Strength Cond. Res. 2015, 29, 1500–1508. [Google Scholar] [CrossRef]
- Chou, P.P.; Chou, Y.L.; Wang, Y.S.; Wang, R.T.; Lin, H.T. Effects of glenohumeral internal rotation deficit on baseball pitching among pitchers of different ages. J. Shoulder Elbow Surg. 2018, 27, 599–605. [Google Scholar] [CrossRef]
- Lin, H.T.; Lin, Y.C.; Chou, Y.L.; Wu, H.C.; Wang, R.T.; Chou, P.P. Effect of Glenohumeral Internal Rotation Deficit on Shoulder in Baseball Pitchers during Fastball Pitching. Int. J. Environ. Res. Public Health 2020, 17, 8211. [Google Scholar] [CrossRef] [PubMed]
- Calabrese, G.J. Pitching mechanics, revisited. Int. J. Sports Phys. Ther. 2013, 8, 652–660. [Google Scholar] [PubMed]
- Wight, J.; Richards, J.; Hall, S. Influence of pelvis rotation styles on baseball pitching mechanics. Sports Biomech. 2004, 3, 67–83. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Pattern1 | Pattern2 | p Value |
|---|---|---|---|
| Hip-to-shoulder separation | Closed | Open | -- |
| Participants | 18 | 12 | -- |
| Age (years) | 23 ± 2 | 24 ± 3 | 0.070 |
| Body height (cm) | 178 ± 4 | 182 ± 6 | 0.149 |
| Body mass (kg) | 81 ± 8 | 84 ± 5 | 0.271 |
| Abbreviation | Description |
|---|---|
| 1. Parameters of timing of events | |
| BRt-FCt (s) | Time interval between FC and BR |
| MKUr (%) | Time ratio of MKU |
| MERr (%) | Time ratio of MER |
| MIRr (%) | Time ratio of MIR |
| 2. Parameters of angle at time events | |
| TAoMKU (°) | Trunk angle at the moment of MKU |
| TAoFC (°) | Trunk angle at the moment of FC |
| TAoMER (°) | Trunk angle at the moment of MER |
| TAoBR (°) | Trunk angle at the moment of BR |
| TAoMIR (°) | Trunk angle at the moment of MIR |
| PAoMKU (°) | Pelvic angle at the moment of MKU |
| PAoFC (°) | Pelvic angle at the moment of FC |
| PAoMER (°) | Pelvic angle at the moment of MER |
| PAoBR (°) | Pelvic angle at the moment of BR |
| PAoMIR (°) | Pelvic angle at the moment of MIR |
| 3. Parameters of trunk-pelvis separation (TPS) at time events | |
| TPSoMKU (°) | TPS at the moment of MKU |
| TPSoFC (°) | TPS at the moment of FC |
| TPSoMER (°) | TPS at the moment of MER |
| TPSoBR (°) | TPS at the moment of BR |
| TPSoMIR (°) | TPS at the moment of MIR |
| 4. Parameters associated with special time events & intervals | |
| AC1r (%) | Time ratio of AC1 |
| AC2r (%) | Time ratio of AC2 |
| AC2r-AC1r (%) | Time ratio interval between AC1 and AC2 |
| 5. Parameters those are important in stride phase | |
| StrideL/BH (%) | Percentage of stride length normalized with body height |
| MKH/BH (%) | Percentage of maximal knee height normalized with body height |
| SFCD (°) | Stride foot contact direction |
| Parameter | Pattern1 | Pattern2 | 95% CI | p Value |
|---|---|---|---|---|
| 1. Parameters of timing of events | ||||
| BRt-FCt (s) | 0.15 ± 0.03 | 0.17 ± 0.04 | −0.05~0.01 | 0.103 |
| MKUr (%) | −475 ± 80 | −387 ± 100 | −168~−8 | 0.032 * |
| MERr (%) | 81 ± 5 | 82 ± 4 | −5~4 | 0.717 |
| MIRr (%) | 273 ± 48 | 262 ± 37 | −31~53 | 0.589 |
| 2. Parameters of angle at time events | ||||
| TAoMKU (°) | −107 ± 8 | −99 ± 7 | −15~−0.3 | 0.043 * |
| TAoFC (°) | −93 ± 12 | −97 ± 8 | −6~14 | 0.404 |
| TAoMER (°) | 4 ± 7 | 11 ± 6 | −13~−1 | 0.019 * |
| TAoBR (°) | 15 ± 6 | 22 ± 3 | −12~−2 | 0.005 * |
| TAoMIR (°) | 82 ± 13 | 95 ± 15 | −25~−0.1 | 0.048 * |
| PAoMKU (°) | −128 ± 10 | −133 ± 14 | −6~16 | 0.331 |
| PAoFC (°) | −62 ± 6 | −74 ± 2 | 7~17 | <0.001 * |
| PAoMER (°) | 5 ± 7 | −3 ± 8 | 0.6~14 | 0.035 * |
| PAoBR (°) | 12 ± 7 | 4 ± 8 | 0.4~15 | 0.038 * |
| PAoMIR (°) | 38 ± 11 | 37 ± 12 | −9~12 | 0.813 |
| 3. Parameters of trunk−pelvis separation (TPS) at time events | ||||
| TPSoMKU (°) | 21 ± 9 | 34 ± 13 | −22~−3 | 0.011 * |
| TPSoFC (°) | −31 ± 8 | −24 ± 6 | −15~−0.5 | 0.037 * |
| TPSoMER (°) | −1 ± 7 | 14 ± 9 | −22~−8 | <0.001 * |
| TPSoBR (°) | 3 ± 6 | 18 ± 9 | −21~−9 | <0.001 * |
| TPSoMIR (°) | 44 ± 6 | 58 ± 21 | −25~−3 | 0.017 * |
| 4. Parameters associated with special time events & intervals | ||||
| AC1r (%) | −100 ± 29 | −62 ± 11 | −62~−14 | 0.004 * |
| AC2r (%) | 88 ± 16 | 65 ± 24 | 6~40 | 0.010 * |
| AC2r-AC1r (%) | 191 ± 27 | 127 ± 24 | 40~88 | <0.001 * |
| 5. Parameters those are important in stride phase | ||||
| StrideL/BH (%) | 69 ± 4 | 70 ± 3 | −4~3 | 0.651 |
| MKH/BH (%) | 65 ± 5 | 67 ± 6 | −7~3 | 0.438 |
| SFCD (°) | −7 ± 7 | −10 ± 10 | −5~11 | 0.407 |
| 6. Resultant parameter | ||||
| Ball Speed (km/h) | 125 ± 6 | 119 ± 8 | 4~9 | <0.001 * |
| Parameter | Correlation Coefficient * | Cut-Off Value from ROC | Cohen’s d |
|---|---|---|---|
| PAoFC (°) | 0.613 | −69.95 | 2.68 |
| BRt-FCt (s) | −0.527 | 0.19 | −0.57 |
| MKUr (%) | −0.454 | −401.69 | −0.97 |
| TPSoFC (°) | −0.335 | −24.92 | −0.99 |
| The New Method | p Value | ||||||
|---|---|---|---|---|---|---|---|
| Type1 | Type2 | Type3 | Type4 | ||||
| Ball speed (km/hr) | 126.1 a ±5.3 | 120.2 b ±9.4 | 120.8 b ±5.6 | 120.5 b ±8.9 | <0.001 * | ||
| Expert’s decision | Pattern1 | 58.9% (53/90) | 10% (9/90) | 12.2% (11/90) | 18.9% (17/90) | -- | |
| Pattern2 | 8.3% (5/60) | 23.3% (14/60) | 31.7% (19/60) | 36.7% (22/60) | -- | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Y.-C.; Chou, P.P.-H.; Lin, H.-T.; Shih, C.-L.; Lu, C.-C.; Su, F.-C. A New Method for Evaluating Pelvic and Trunk Rotational Pitching Mechanics: From Qualitative to Quantitative Approaches. Int. J. Environ. Res. Public Health 2021, 18, 905. https://doi.org/10.3390/ijerph18030905
Lin Y-C, Chou PP-H, Lin H-T, Shih C-L, Lu C-C, Su F-C. A New Method for Evaluating Pelvic and Trunk Rotational Pitching Mechanics: From Qualitative to Quantitative Approaches. International Journal of Environmental Research and Public Health. 2021; 18(3):905. https://doi.org/10.3390/ijerph18030905
Chicago/Turabian StyleLin, Yu-Chuan, Paul Pei-Hsi Chou, Hwai-Ting Lin, Chia-Lung Shih, Cheng-Chang Lu, and Fong-Chin Su. 2021. "A New Method for Evaluating Pelvic and Trunk Rotational Pitching Mechanics: From Qualitative to Quantitative Approaches" International Journal of Environmental Research and Public Health 18, no. 3: 905. https://doi.org/10.3390/ijerph18030905
APA StyleLin, Y. -C., Chou, P. P. -H., Lin, H. -T., Shih, C. -L., Lu, C. -C., & Su, F. -C. (2021). A New Method for Evaluating Pelvic and Trunk Rotational Pitching Mechanics: From Qualitative to Quantitative Approaches. International Journal of Environmental Research and Public Health, 18(3), 905. https://doi.org/10.3390/ijerph18030905