
Improvements of Warning Signs for Black Ice Based on Driving Simulator Experiments



Abstract
:1. Introduction
1.1. Background
1.2. Objective
2. Literature Review
2.1. Impact of Warning Signs on Safety
2.2. Warning Signs and Visual Behavior
3. Materials and Methods
3.1. Apparatus
3.1.1. Eye Tracker
3.1.2. Driving Simulator
3.2. Experimental Stimulus
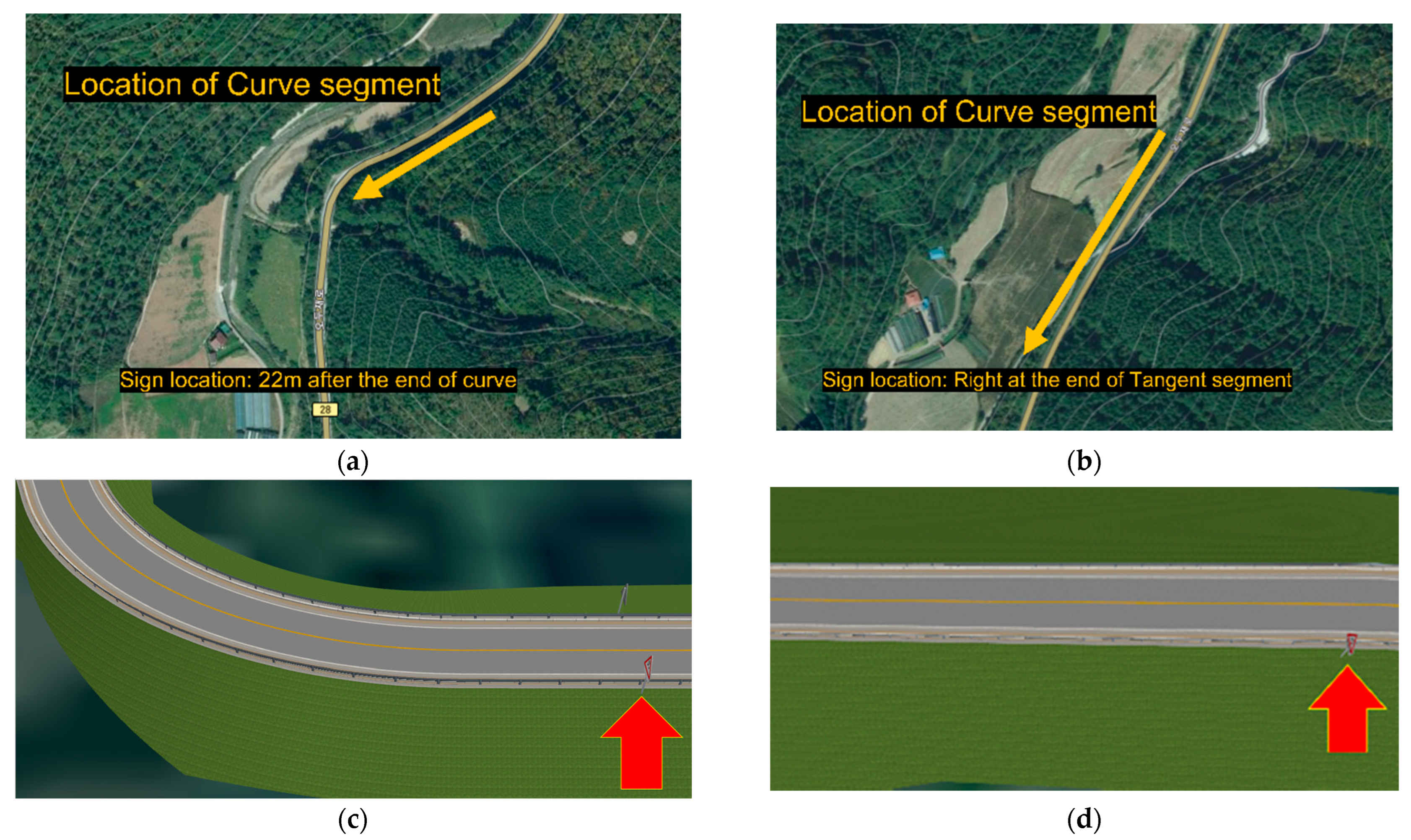
3.3. Scenarios
3.4. Procedure of the Experiments and Participants
3.5. Data Analysis Methodology
3.5.1. Determination of Location at Which Driver Behavior Starts to Change
3.5.2. Correlation between Drivers’ Behavior Using Deceleration and Visual Data
4. Results
4.1. Determination of Location at Which Driver Behavior Started to Change
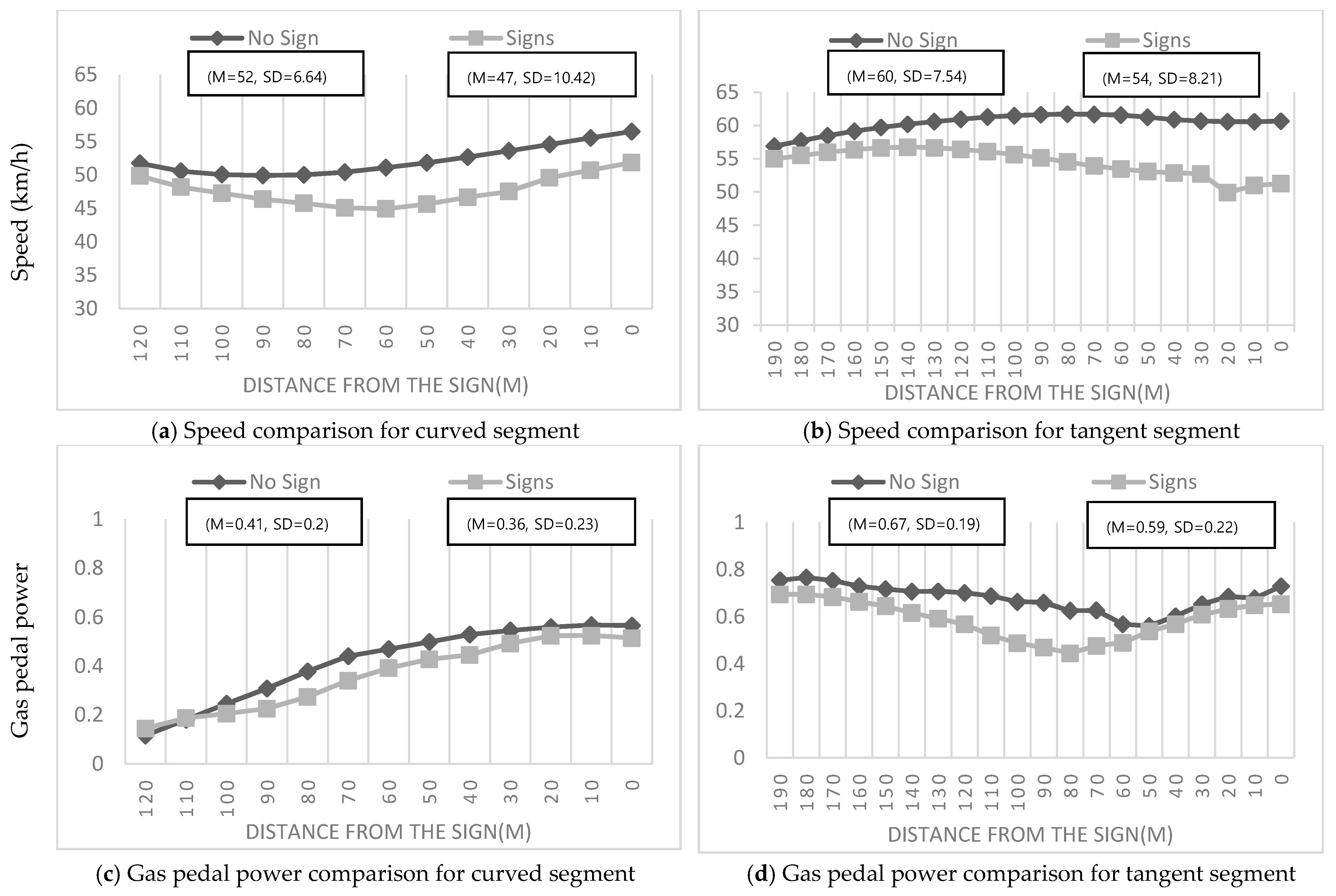
4.2. Driving Behavior: Speed Deceleration
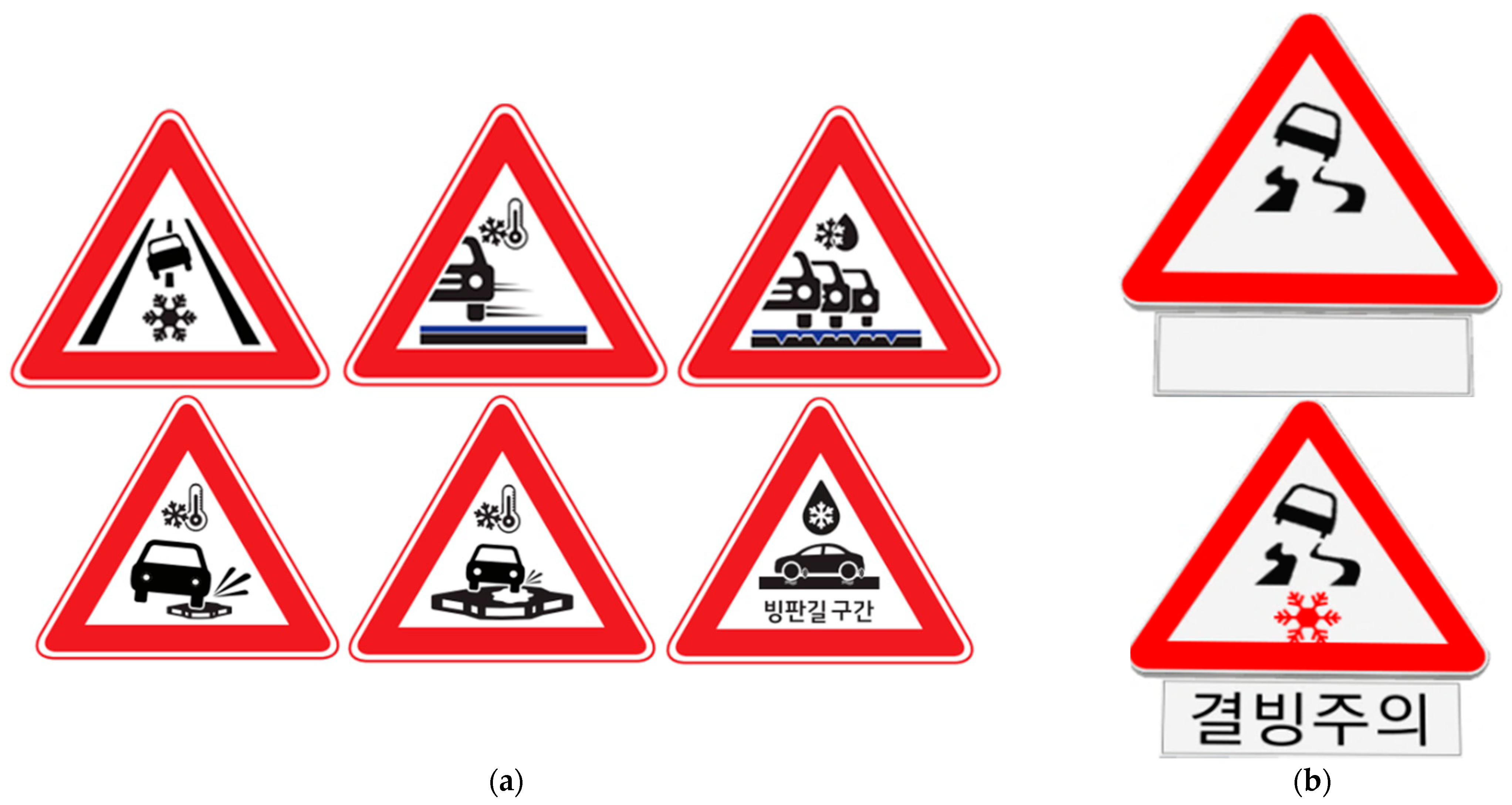
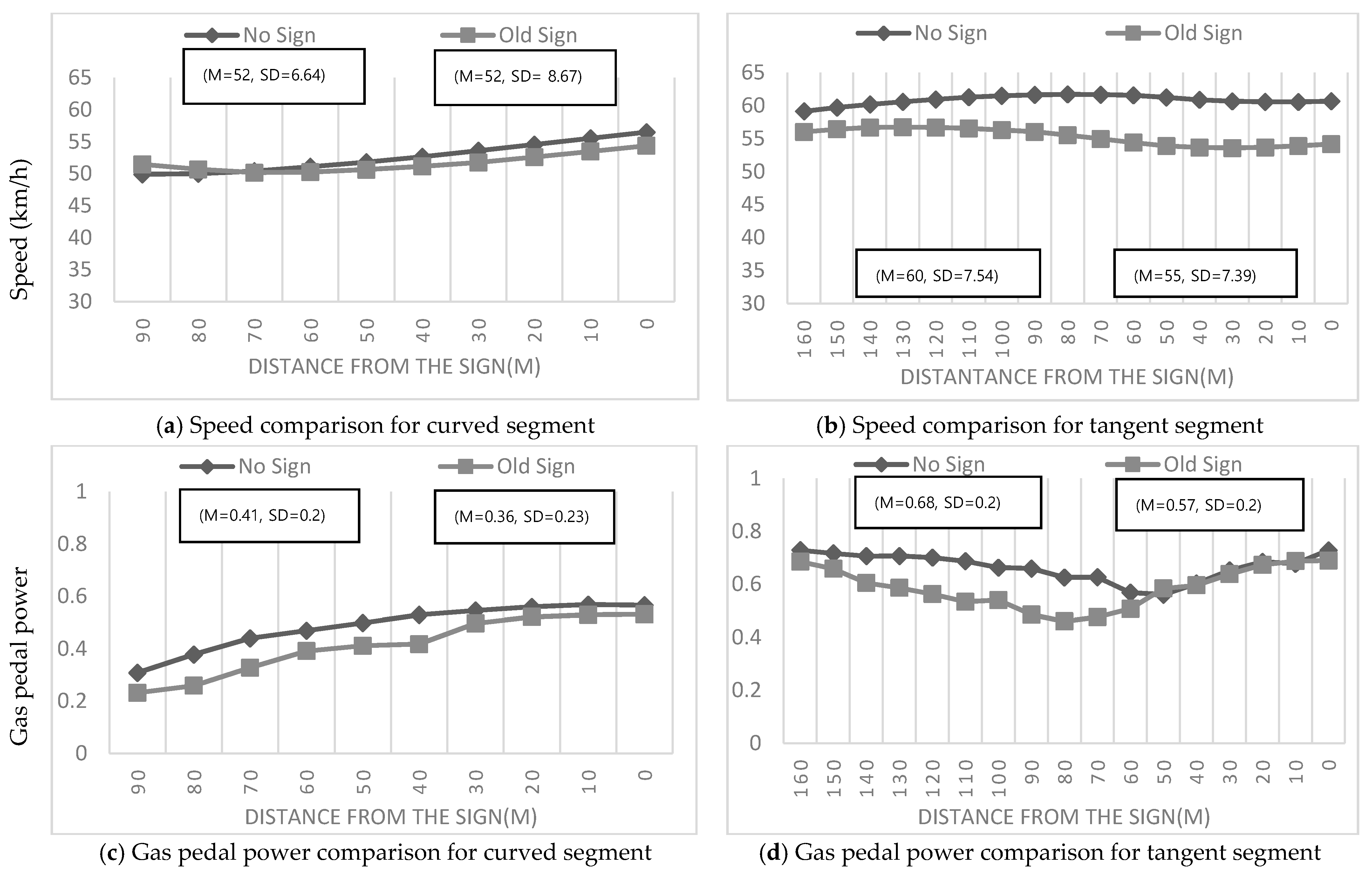
4.2.1. Conventional Static Warning Signs for Black Ice
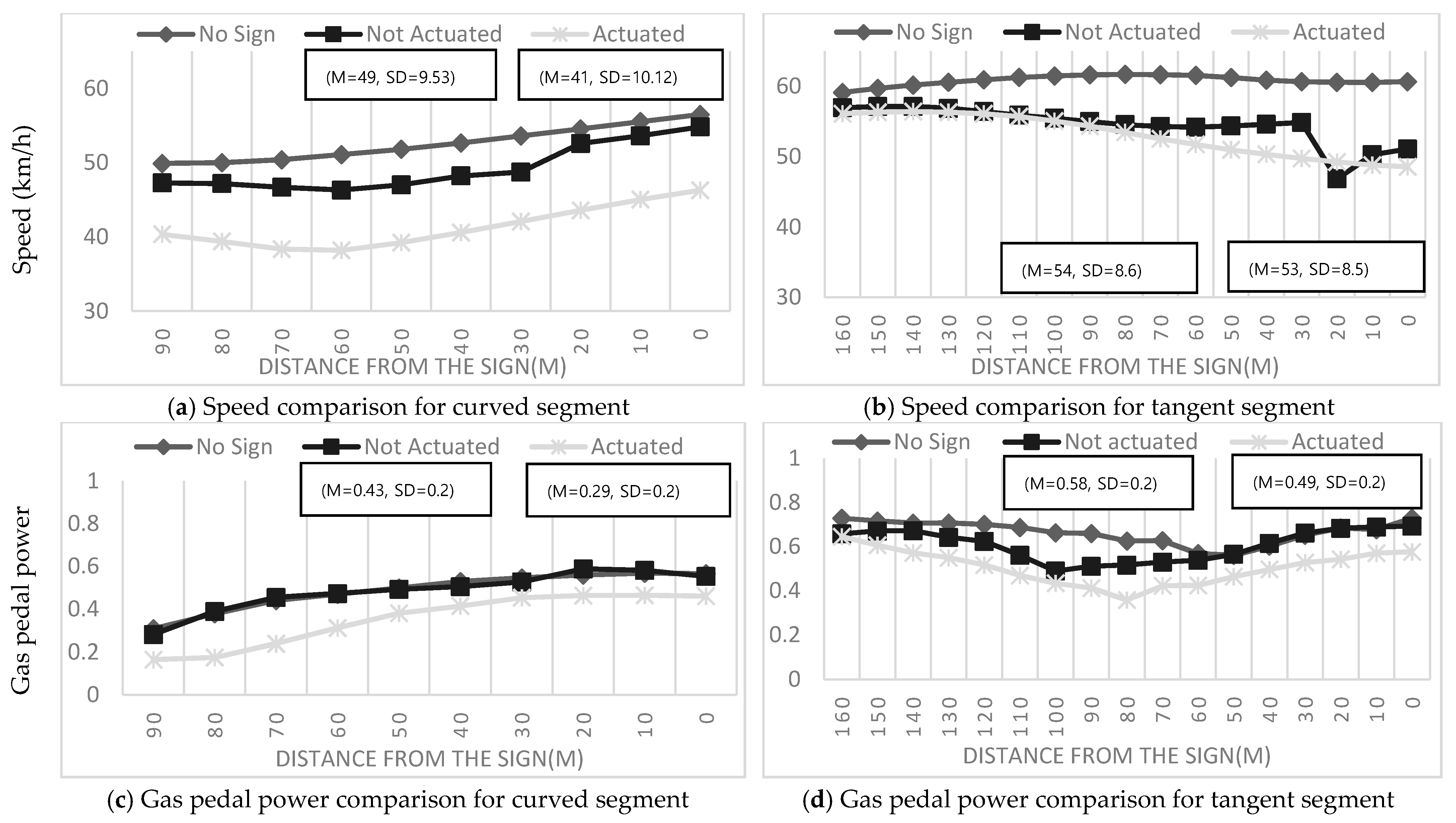
4.2.2. New Warning Signs Actuated by Weather Conditions
4.3. Visual Behavior: Total Fixation Visit and Average Fixation Duration
4.4. Correlations between Variables
- Conventional static warning signs for black ice
- 2.
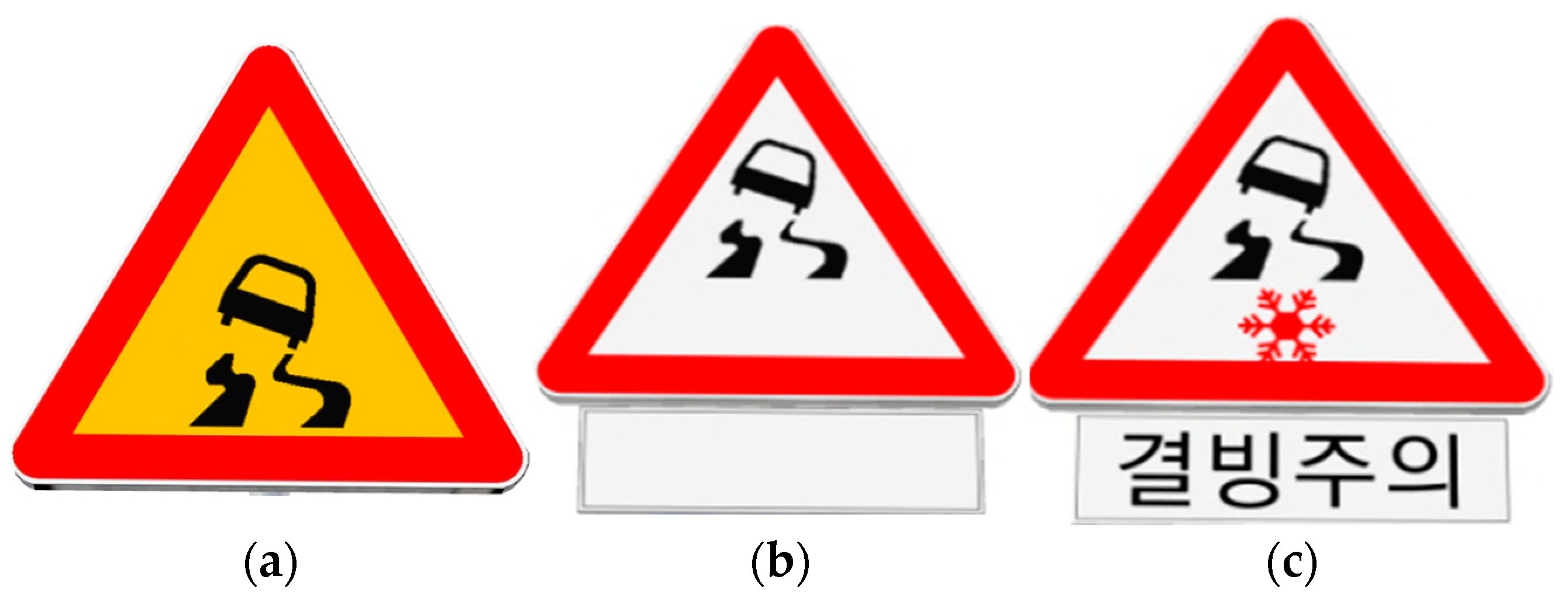
- New warning signs not actuated by weather
- 3.
- New weather-actuated warning signs
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andersson, A.K.; Chapman, L. The impact of climate change on winter road maintenance and traffic accidents in West Midlands, UK. Accid. Anal. Prev. 2011, 43, 284–289. [Google Scholar] [CrossRef] [PubMed]
- Andreescu, M.; Frost, D. Weather and traffic accidents in Montreal, Canada. Climate Research [Internet]. Inter-Res. Sci. Cent. 1998, 9, 225–230. [Google Scholar] [CrossRef] [Green Version]
- Chapman, L.; Thornes, J.E. What spatial resolution do we need for a route-based road weather decision support system? Theor. Appl. Climatol. 2011, 104, 551–559. [Google Scholar] [CrossRef]
- Norrman, J.; Eriksson, M.; Lindqvist, S. Relationships between road slipperiness, traffic accident risk and winter road maintenance activity. Clim. Res. 2000, 15, 185–193. [Google Scholar] [CrossRef] [Green Version]
- Usman, T.; Fu, L.; Miranda-Moreno, L.F. Accident prediction models for winter road safety. J. Transp. Res. Board 2011, 2237, 144–151. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.S. Analyses on sunshine influence and surface freezing section of road using GIS. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2005, 23, 293–301. [Google Scholar]
- Samsung Traffic Safety Research Institute. Analysis of the Relationship between Regional Climate Changes and Traffic Accidents; Samsung Traffic Safety Research Institute: Seoul, Korea, 2016. [Google Scholar]
- Wetton, M.; Horswill, M.; Hatherly, C.; Wood, J.; Pachana, N.; Anstey, K. The development and validation of two complementary measures of drivers’ hazard perception ability. Accid. Anal. Prev. 2010, 42, 1232–1239. [Google Scholar] [CrossRef] [Green Version]
- Wallis, T.S.A.; Horswill, M.S. Using fuzzy signal detection theory to determine why experienced and trained drivers respond faster than novices in a hazard perception test. Accid. Anal. Prev. 2007, 39, 1177–1185. [Google Scholar] [CrossRef]
- Horswill, M.S.; McKenna, F.P. Drivers’ hazard perception ability: Situation awareness on the road. In A Cognitive Approach to Situation Awareness; Banbury, S., Tremblay, S., Eds.; Ashgate: Aldershot, UK, 2004; pp. 155–175. [Google Scholar]
- Shahar, A.; Alberti, C.; Clarke, D.; Crundall, D. Hazard perception as a function of target location and the field of view. Accid. Anal. Prev. 2010, 42, 1577–1584. [Google Scholar] [CrossRef]
- Al-Kaisy, A.; Hardy, A.; Nemfakos, C. Static warning signs of occasional hazards: Do they work? ITE J. 2008, 6, 38–42. [Google Scholar]
- Scialfa, C.T.; Borkenhagen, D.; Lyon, J.; Deschênes, M.; Horswill, M.; Wetton, M. The effects of driving experience on responses to a static hazard perception test. Accid. Anal. Prev. 2012, 45, 547–553. [Google Scholar] [CrossRef] [PubMed]
- Carson, J.; Mannering, F. The effect of ice warning signs on ice-accident frequencies and severities. Accid. Anal. Prev. 2001, 33, 99–109. [Google Scholar] [CrossRef]
- Insurance Institute for Highway Safety. Fatality Facts 2008: Roadside Hazards. 2010. Available online: http://www.iihs.org/research/fatality_facts_2008/roadsidehazards.html (accessed on 17 February 2010).
- Pradhan, A.; Pollatsek, A.; Knodler, M.; Fisher, D. Can younger drivers be trained to scan for information that will reduce their risk in roadway scenarios that are hard to identify as hazardous? Ergonomics 2009, 52, 657–673. [Google Scholar] [CrossRef] [Green Version]
- Vest, A.; Stamatiadis, N. Use of warning signs and markings to reduce speeds on curves. In Proceedings of the 84th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 9–13 January 2005. [Google Scholar]
- Zwahlen, H.T. Advisory speed signs and curve signs and their effect on driver eye scanning and driving performance. Transp. Res. Rec. 1987, 1111, 110–120. [Google Scholar]
- Zador, P.; Stein, H.S.; Wright, P.; Hall, J. Effects of chevrons, post mounted delineators, and raised pavement markers on driver behaviour at roadway curves. Transp. Res. Rec. 1987, 1114, 1–10. [Google Scholar]
- Horberry, T.; Anderson, J.; Regan, M.A. The possible safety benefits of enhanced road markings: A driving simulator evaluation. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 77–87. [Google Scholar] [CrossRef]
- Lyles, R.W. An Evaluation of Warning and Regulatory Signs for Curves on Rural Roads (Report No. FHWA/RD-80/009); FWHA, US Department of Transportation: Washington, DC, USA, 1980.
- Porter, R.J.; Donnell, T.E.; Mahoney, K.M. Evaluation of effects of centreline rumble strips on lateral vehicle placement and speed. Transp. Res. Rec. 2004, 1862, 10–16. [Google Scholar] [CrossRef]
- Arnold, E.D.; Lantz, K.E. Evaluation of Best Practices in Traffic Operations and Safety: Phase I: Flashing LED Stop Sign and Optical Speed Bars; Report FHWA/VTRC 07-R34; Virginia Transportation Research Council: Charlottesville, VA, USA, 2007. [Google Scholar]
- Thompson, M.B.; Carlson, P.J. Speed changes due to transverse rumble strips on approaches to high-speed stop-controlled intersections. J. Transp. Res. Board 2006, 1973, 1–9. [Google Scholar] [CrossRef]
- Katz, J.; Duke, D.E.; Rakha, H.A. Design and evaluation of peripheral transverse bars to reduce vehicle speeds. In Proceedings of the 85th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2006; p. 14. [Google Scholar]
- Krull, K.; Hummer, J. The Effect of Fluorescent Yellow Warning Signs at Hazardous Locations; Final Report; North Carolina State University: Raleigh, NC, USA, 2000. [Google Scholar]
- Al-Ghamdi, A.S.; Al-Gadhi, S.A. Warning signs as countermeasures to camel-vehicle collisions in Saudi Arabia. Accid. Anal. Prev. 2004, 36, 749–760. [Google Scholar] [CrossRef]
- Montella, A.; D’Ambrosio, A.; Aria, M.; Galante, F.; Mauriello, F.; Pernetti, M. Perceptual measures to influence operating speeds and reduce crashes at rural intersections: Driving simulator experiment. Transp. Res. Rec. 2010, 2149, 11–20. [Google Scholar] [CrossRef]
- Dutta, A.; Fisher, D.L.; Noyce, D.A. Use of a driving simulator to evaluate and optimize factors affecting understandability of variable message signs. Transp. Res. Part F Traffic Psychol. Behav. 2004, 7, 209–227. [Google Scholar] [CrossRef]
- Jamson, A.H.; Pyne, H.C.; Carste, O.M.J. Evaluation of traffic calming measures using the Leeds Driving Simulator. In Proceedings of the Driving Simulation Conference, Paris, France, 7–8 July 1999. [Google Scholar]
- Katz, B.J.; Molino, J.A.; Rakha, H.A. Evaluation of design alternatives of peripheral transverse bars to reduce vehicle speeds and center line encroachment in a driving simulator. In Proceedings of the 87th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2008. [Google Scholar]
- Godley, S.; Triggs, T.J.; Fildes, B.N. Driving simulator validation for speed results. Accid. Anal. Prev. 1997, 34, 589–600. [Google Scholar] [CrossRef]
- Brenac, T. Safety at curves and road geometry standards in some European countries. Transp. Res. Rec. 1996, 1523, 99–106. [Google Scholar] [CrossRef]
- Charlton, S.G. Perceptual and attentional effects on drivers’ speed selection at curves. Accid. Anal. Prev. 2004, 36, 877–884. [Google Scholar] [CrossRef]
- Charlton, S.G. The role of attention in horizontal curves: A comparison of advance warning, delineation, and road marking treatments. Accid. Anal. Prev. 2007, 39, 873–885. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, R.; Baek, J.; Carter, D.L.; Persaud, B.; Lyon, C.; Eccles, K.A.; Gross, F.B.; Lefler, N. Safety Evaluation of Improved Curve Delineation; Publication FHWA-HRT-09-045; US Department of Transportation: Washington, DC, USA, 2009.
- Veneziano, Y.Z.; Turnbull, I. Speed impacts of an icy curve warning system. IET Intell. Transp. Syst. 2014, 8, 93–101. [Google Scholar] [CrossRef] [Green Version]
- Lindgren, R.; Clair, S.S. Butte creek ice warning system. In Oregon Department of Transportation Research Report; Oregon Institute of Technology: Salem, MA, USA, 2009. [Google Scholar]
- Liu, T.; Wang, N.; Yu, H.; Basara, J.; Hong, Y.E.; Bukkapatnam, S. Black Ice Detection and Road Closure Control System for Oklahoma; Department of Transportation, Planning and Research Division: Oklahoma City, OK, USA, 2014.
- Michigan Department of Transportation. Bridge Deck Warning System, Roundabouts Highlight a Year of MDOT Safety Projects; Michigan Department of Transportation: Traverse City, MI, USA, 2019.
- Raney, E.G.; Campbell, S.J.; Bovee, J.C. Using eye movements to evaluate the cognitive processes involved in text comprehension. J. Vis. Exp. 2014, 83, e50780. [Google Scholar] [CrossRef]
- Pradhan, A.; Hammel, K.; DeRamus, R.; Pollatsek, A.; Noyce, D.; Fisher, D. The use of eye movements to evaluate the effects of driver age on risk perception in an advanced driving simulator. Hum. Factors 2005, 47, 840–852. [Google Scholar] [CrossRef]
- Cathcart, J.M.; Doll, T.J.; Schmieder, D.E. Target detection in urban clutter. IEEE Trans. Syst. Man Cybern. 1989, 19, 1242–1250. [Google Scholar] [CrossRef]
- Ho, G.; Scialfa, C.; Caird, J.; Graw, T. Visual search for traffic signs: The effects of clutter, luminance, and aging. Hum. Factors 2001, 43, 194–207. [Google Scholar] [CrossRef]
- Huestegge, L.; Skottke, E.M.; Anders, S.; Müsseler, J.; Debus, G. The development of hazard perception: Dissociation of visual orientation and hazard processing. Transp. Res. Part F Traffic Psychol. Behav. 2010, 13, 1–8. [Google Scholar] [CrossRef]
- Torbjörn, F.; Gregersen, N.P. A comparison of eye movement behavior of inexperienced and experienced drivers in real traffic environments. Optom. Vis. Sci. 2005, 82, 732–739. [Google Scholar]
- Niehorster, D.C.; Santini, T.; Hessels, R.S.; Hooge, I.T.; Kasneci, E.; Nyström, M. The impact of slippage on the data quality of head-worn eye trackers. Behav. Res. Methods 2020, 52, 1140–1160. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marín-Conesa, E.; Sánchez-Ferrer, F.; Grima-Murcia, M.D.; Sánchez-Ferrer, M.L. The application of a system of eye tracking in laparoscopic surgery: A new didactic tool to visual instructions. Front. Surg. 2021, 8, 643611. [Google Scholar] [CrossRef]
- Othman, N.; Fairuz, I.R. Mental workload evaluation of pilots using pupil dilation. Int. Rev. Aerosp. Eng. 2016, 9, 80–84. [Google Scholar] [CrossRef]
- Rayner, K.; Inhoff, A.W.; Morrison, R.E.; Slowiaczek, M.L.; Bertera, J.H. Masking of foveal and parafoveal vision during eye fixations in reading. J. Exp. Psychol. Hum. Percept. Perform. 1981, 7, 167. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.; Zheng, C.Q.; Shao, C.F.; Li, Y.H. Construction and application of 3D traffic environment build platform based on UC-win/Road. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; Volume 505, pp. 1225–1229. [Google Scholar]
- Fukuda, T.; Hitoshi, T. Development of use flow of 3D CAD/VR software for citizens who are non-specialists in city design. In Proceedings of the 15th International Conference on Computer Aided Architectural Design Research in Asia, Hong Kong, China, 7–10 April 2010; pp. 521–530. [Google Scholar]
- Liang, G.; Wang, F.; Shi, Q.; Li, R.; Ji, Z.; Dong, C. Research on the prepositive distance of crosswalk warning markings for unsignalized road section. J. Adv. Transp. 2021, 2021, 8855970. [Google Scholar] [CrossRef]
- Lee, G.S.; Lee, D.M.; Hwang, S.C.; Kwon, W.T. Analyzing driving behavior, road sign attentiveness and recognition with eye tracking data. J. Korea Inst. Intell. Transp. Syst. 2021, 20, 117–132. [Google Scholar] [CrossRef]
- Korea Agency for Infrastructure Technology Advancement. Development of Road Traffic Safety Improvement Technology Considering Characteristics of External Stimuli and Traffic Vehicles; Korea Agency for Infrastructure Technology Advancement: Anyang, Gyeonggi-do, Korea, 2018; Volume 20, pp. 42–47. [Google Scholar]
- Babić, D.; Dijanić, H.; Jakob, L.; Babić, D.; Garcia-Garzon, E. Driver eye movements in relation to unfamiliar traffic signs: An eye tracking study. Appl. Ergon. 2020, 89, 103191. [Google Scholar] [CrossRef]
- Horswill, M.; Kemala, C.; Wetton, M.; Scialfa, C.; Pachana, N. Improving older drivers’ hazard perception ability. Psychol. Aging 2010, 25, 464–469. [Google Scholar] [CrossRef] [Green Version]
- Horswill, M.S.; Pachana, N.A.; Wood, J.; Marrington, S.A.; McWilliam, J.; McCollough, C.M. A comparison of the hazard perception ability of matched groups of healthy drivers aged 35–55, 65–74, and 75–84 years. J. Int. Neuropsychol. Soc. 2009, 15, 799–802. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Horswill, M.S.; Anstey, K.J.; Hatherly, C.G.; Wood, J.M. The crash involvement of older drivers is associated with their hazard perception latencies. J. Int. Neuropsychol. Soc. 2010, 16, 939–944. [Google Scholar] [CrossRef] [PubMed] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Age | 20s | 30s | 40s | 50s | Total |
|---|---|---|---|---|---|
| Male | 4 | 13 | 6 | 6 | 29 |
| Female | 2 | 2 | 3 | 1 | 8 |
| Total | 6 | 15 | 9 | 7 | 37 |
| Distance From Sign (m) | Mean (Standard Deviation) No Sign/Signs | t-Value (p-Value) | |||
|---|---|---|---|---|---|
| Speed | Gas Pedal Power | Speed | Gas Pedal Power | ||
| Curve segment | 120 | 51.74/49.17 (8.74/11.37) | 0.12/0.15 (0.15/0.18) | 1.482(0.143) | −1.083 (0.283) |
| 110 | 50.55/47.68 (8.55/11.51) | 0.19/0.19 (0.16/0.19) | 1.4 (0.163) | 0.053 (0.958) | |
| 100 | 50.05/46.74 (8.10/11.42) | 0.25/0.19 (0.17/0.19) | 2.001 * (0.049) | 1.653 (0.104) | |
| 90 | 49.91/45.88 (7.55/11.26) | 0.3/0.23 (0.17/0.19) | 2.565 * (0.012) | 2.395 * (0.02) | |
| Tangent segment | 190 | 56.89/56.96 (6.06/7.31) | 0.75/0.67 (0.13/0.18) | 1.463 (0.145) | 2.627 ** (0.009) |
| 180 | 57.70/55.37 (6.13/7.48) | 0.76/0.66 (0.12/0.2) | 1.725 (0.086) | 2.888 ** (0.004) | |
| 170 | 58.47/55.69 (6.23/7.64) | 0.75/0.63 (0.12/0.23) | 2.019 * (0.045) | 4.257 ** (0.000) | |
| 160 | 59.15/55.84 (6.33/7.93) | 0.72/0.6 (0.17/0.25) | 2.325 * (0.021) | 3.282 ** (0.002) | |
| Sign Condition | t-Value (p-Value) | ||||
|---|---|---|---|---|---|
| No Sign | Old Sign | Not Actuated | Actuated | ||
| Curve segment | No sign | - | - | - | - |
| Old sign | −0.048 (0.962) | - | - | - | |
| Not actuated | −0.426 (0.672) | −0.360 (0.72) | - | - | |
| Actuated | −3.317 (0.001 **) | −3.125 (0.003 **) | −2.683 (0.009 **) | - | |
| Tangent segment | No sign | - | - | - | - |
| Old sign | −1.220 (0.227) | - | - | - | |
| Not actuated | −0.192 (0.848) | 1.103 (0.274) | - | - | |
| Actuated | −2.978 (0.004 **) | −1.878 (0.065) | −2.934 (0.005 **) | - | |
| Number of Participants Who Fixed Eyes on Sign (%) | Total Number of Fixation Visits (N) | Mean of Fixation Duration (SD) (ms) | ||
|---|---|---|---|---|
| Curve segment | Old sign | 12 (32%) | 25 | 252.36 (222.9) |
| Not actuated | 19 (51%) | 67 | 247.27 (162.5) | |
| Actuated | 19 (51%) | 62 | 352.03 (239.0) | |
| Tangent segment | Old sign | 16 (43%) | 65 | 499.44 (594.9) |
| Not actuated | 19 (51%) | 93 | 621.51 (782.7) | |
| Actuated | 23 (62%) | 133 | 606.67 (715.6) |
| Eye Fixation on Signs/No Eye Fixation | ||||
|---|---|---|---|---|
| Old Sign | Not Actuated | Actuated | ||
| Curve Segment | Speed deceleration (km/h) | 6.84/6.32 | 10.83/11.92 | 12.80/9.57 |
| Speed standard deviation (km/h) | 2.4/2.21 | 4.08/4.44 | 4.49/3.34 | |
| Gas pedal power | 0.38/0.43 | 0.50/0.48 | 0.37/0.33 | |
| Tangent Segment | Speed deceleration (km/h) | 8.15/7.04 | 15.99/13.30 | 10.95/11.36 |
| Speed standard deviation (km/h) | 2.84/2.60 | 4.55/4.31 | 3.93/3.97 | |
| Gas pedal power | 0.62/0.56 | 0.64/0.58 | 0.53/0.5 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.; Hwang, S.; Lee, D. Improvements of Warning Signs for Black Ice Based on Driving Simulator Experiments. Int. J. Environ. Res. Public Health 2022, 19, 7549. https://doi.org/10.3390/ijerph19127549
Lee G, Hwang S, Lee D. Improvements of Warning Signs for Black Ice Based on Driving Simulator Experiments. International Journal of Environmental Research and Public Health. 2022; 19(12):7549. https://doi.org/10.3390/ijerph19127549
Chicago/Turabian StyleLee, Ghangshin, Sooncheon Hwang, and Dongmin Lee. 2022. "Improvements of Warning Signs for Black Ice Based on Driving Simulator Experiments" International Journal of Environmental Research and Public Health 19, no. 12: 7549. https://doi.org/10.3390/ijerph19127549
APA StyleLee, G., Hwang, S., & Lee, D. (2022). Improvements of Warning Signs for Black Ice Based on Driving Simulator Experiments. International Journal of Environmental Research and Public Health, 19(12), 7549. https://doi.org/10.3390/ijerph19127549