
A Bi-Objective Home Health Care Routing and Scheduling Problem under Uncertainty


Abstract
:1. Introduction
2. Related Works
2.1. Operational Constraints
2.2. Multi-Objective Optimization
2.3. Uncertainties
- We develop a new bi-objective MILP model that aims to optimize the travel cost as well as the satisfaction of caregivers and patients, considering the alignment of caregivers’ qualifications with patients’ requirements as well as workload balance.
- We propose the ALNS-EMDLS to solve the problem. The effectiveness of the new approach is validated by experimental results thanks to the comparison with the Gurobi solver [50]. The stochastic ALNS-EMDLS is proposed to deal with uncertainties. The contrast between the stochastic and original versions demonstrates the stochastic method’s robustness.
- In order to refine and enhance the application of our method, we conduct a sensitivity analysis to identify suitable parameters and apply them to real-world data in a case study, providing actionable management recommendations to choose the suitable schedules.
3. Problem Statement
4. Multi-Objective Algorithms
4.1. Enhanced Multi-Directional Local Search Algorithm (EMDLS)
4.2. Adaptive Large Neighborhood Search (ALNS)
4.2.1. Destroy and Repair Operators
4.2.2. Adaptive Weight Adjustment and Acceptance Criterion
| Algorithm 1 ALNS-EMDLS |
Input: a set F only including an initial solution x, repair operators, destroy operators, deviation d, , , , Output: the Pareto front F
|
4.3. Stochastic Method
| Algorithm 2 Stochastic simulation for computing the expectation of penalty cost |
Input: a solution, a number of scenario U, , Output: estimate expected value of penalty cost
|
5. Computational Study
5.1. Data Sets and Experimental Setup
5.2. Performance Metrics
5.3. Deterministic Bi-Objective Solutions
5.4. Stochastic Bi-Objective Solutions
6. Management Recommendations
6.1. The Influence of Uncertainty on Cost and Care Quality
6.2. Practical Application for Enhanced Understanding
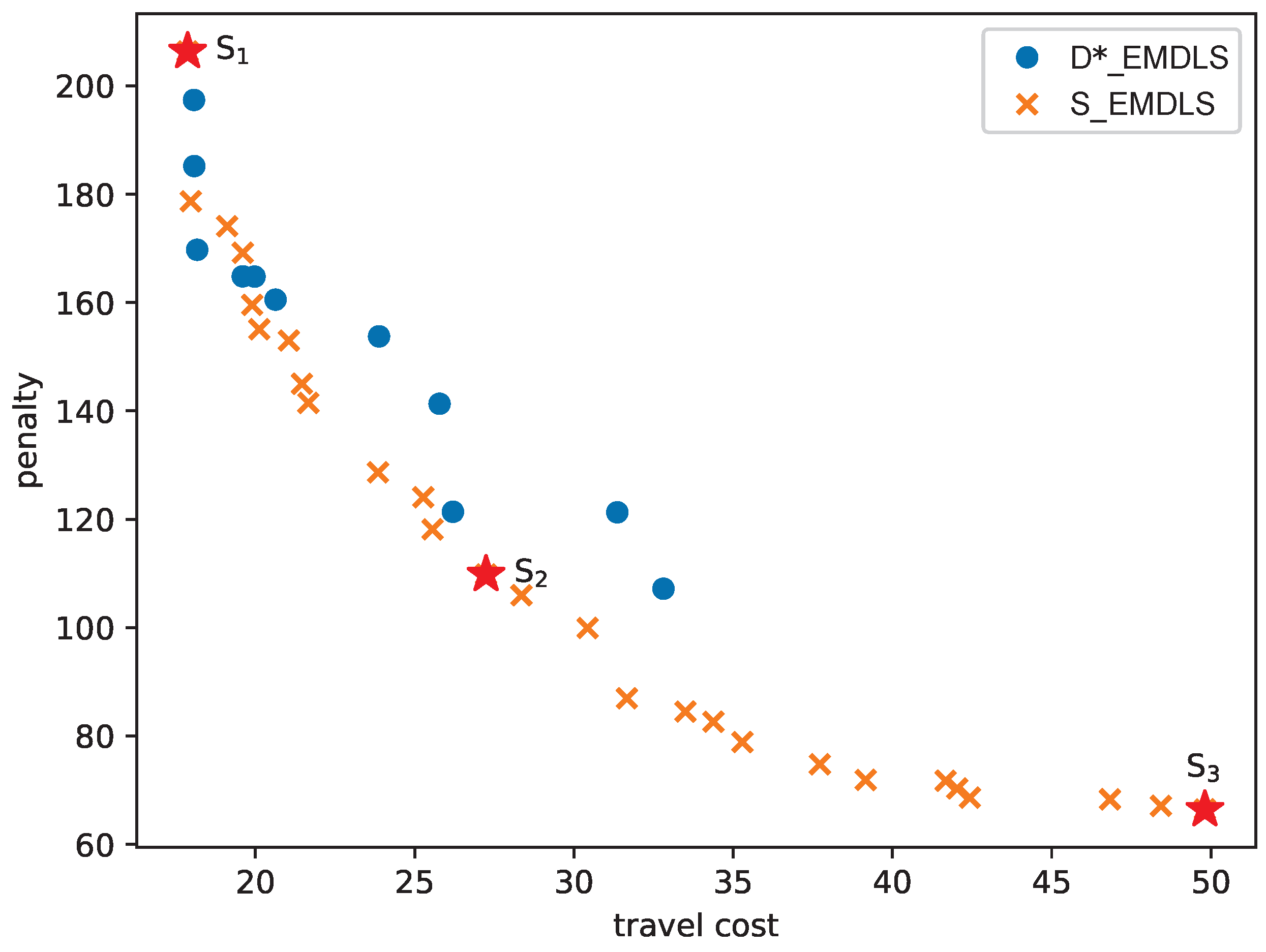
- If the majority of patients have a higher tolerance for exceeding their end time of the time windows, the manager may opt for a solution located on the left side of the Pareto front, which prioritizes minimizing travel costs.
- Although the minimum and maximum numbers of patients that each caregiver needs to visit (m and n) are limited in the proposed model, the solution can be chosen to achieve a better workload balance.
- The routes of can be selected when the manager prefers better satisfaction for patients and caregivers.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Algorithms
| Algorithm A1 Worst destroy operator |
Input: a solution x, the number of nodes to be removed q Output: the removal list D
|
| Algorithm A2 Relatedness destroy operator |
Input: a solution x Output: the removal list D
|
| Algorithm A3 Greedy repair operator |
Input: the solution without the nodes in the removal list D Output: a new solution
|
| Algorithm A4 Regret repair |
Input: the solution without the nodes in the removal list D, Output: a new solution
|
References
- Chahed, S.; Matta, A.; Sahin, E.; Dallery, Y. Operations management related activities for home health care providers. IFAC Proc. Vol. 2006, 39, 641–646. [Google Scholar] [CrossRef]
- Rodriguez, C.; Garaix, T.; Xie, X.; Augusto, V. Staff dimensioning in homecare services with uncertain demands. Int. J. Prod. Res. 2015, 53, 7396–7410. [Google Scholar] [CrossRef]
- Grieco, L.; Utley, M.; Crowe, S. Operational research applied to decisions in home health care: A systematic literature review. J. Oper. Res. Soc. 2021, 72, 1960–1991. [Google Scholar] [CrossRef]
- Gutiérrez, E.V.; Gutiérrez, V.; Vidal, C.J. Home health care logistics management: Framework and research perspectives. Int. J. Ind. Eng. Manag. 2013, 4, 173. [Google Scholar] [CrossRef]
- Dolinar, R. The importance of good insulin injection practices in diabetes management. US Endocrinol. 2009, 5, 49–52. [Google Scholar] [CrossRef]
- Holdoway, A. Nutrition in palliative care: Issues, perceptions and opportunities to improve care for patients. Br. J. Nurs. 2022, 31, S20–S27. [Google Scholar] [CrossRef] [PubMed]
- Toth, P.; Vigo, D. Vehicle Routing; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2014. [Google Scholar]
- Bazirha, M. A novel MILP formulation and an efficient heuristic for the vehicle routing problem with lunch break. Ann. Oper. Res. 2023, 1–26. [Google Scholar] [CrossRef]
- Baniamerian, A.; Bashiri, M.; Zabihi, F. Two phase genetic algorithm for vehicle routing and scheduling problem with cross-docking and time windows considering customer satisfaction. J. Ind. Eng. Int. 2018, 14, 15–30. [Google Scholar] [CrossRef]
- Fikar, C.; Hirsch, P. Home health care routing and scheduling: A review. Comput. Oper. Res. 2017, 77, 86–95. [Google Scholar] [CrossRef]
- Cissé, M.; Yalçındağ, S.; Kergosien, Y.; Şahin, E.; Lenté, C.; Matta, A. OR problems related to Home Health Care: A review of relevant routing and scheduling problems. Oper. Res. Health Care 2017, 13, 1–22. [Google Scholar] [CrossRef]
- Liu, R.; Yuan, B.; Jiang, Z. Mathematical model and exact algorithm for the home care worker scheduling and routing problem with lunch break requirements. Int. J. Prod. Res. 2017, 55, 558–575. [Google Scholar] [CrossRef]
- Shahnejat-Bushehri, S.; Tavakkoli-Moghaddam, R.; Momen, S.; Ghasemkhani, A.; Tavakkoli-Moghaddam, H. Home health care routing and scheduling problem considering temporal dependencies and perishability with simultaneous pickup and delivery. IFAC-PapersOnLine 2019, 52, 118–123. [Google Scholar] [CrossRef]
- Trautsamwieser, A.; Gronalt, M.; Hirsch, P. Securing home health care in times of natural disasters. Spectrum 2011, 33, 787–813. [Google Scholar] [CrossRef]
- Bertels, S.; Fahle, T. A hybrid setup for a hybrid scenario: Combining heuristics for the home health care problem. Comput. Oper. Res. 2006, 33, 2866–2890. [Google Scholar] [CrossRef]
- Carello, G.; Lanzarone, E.; Mattia, S. Trade-off between stakeholders’ goals in the home care nurse-to-patient assignment problem. Oper. Res. Health Care 2018, 16, 29–40. [Google Scholar] [CrossRef]
- Nikzad, E.; Bashiri, M.; Abbasi, B. A matheuristic algorithm for stochastic home health care planning. Eur. J. Oper. Res. 2021, 288, 753–774. [Google Scholar] [CrossRef]
- Hiermann, G.; Prandtstetter, M.; Rendl, A.; Puchinger, J.; Raidl, G.R. Metaheuristics for solving a multimodal home-healthcare scheduling problem. Cent. Eur. J. Oper. Res. 2015, 23, 89–113. [Google Scholar] [CrossRef]
- Rest, K.D.; Hirsch, P. Daily scheduling of home health care services using time-dependent public transport. Flex. Serv. Manuf. J. 2016, 28, 495–525. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Arora, J.S. Chapter 18–Multi-objective Optimum Design Concepts and Methods. In Introduction to Optimum Design (Fourth Edition), 4th ed.; Academic Press: Boston, MA, USA, 2017; pp. 771–794. [Google Scholar]
- Rao, S. Game theory approach for multiobjective structural optimization. Comput. Struct. 1987, 25, 119–127. [Google Scholar] [CrossRef]
- Ghotbi, E. Bi-and Multi Level Game Theoretic Approaches in Mechanical Design. Ph.D. Thesis, The University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2013. [Google Scholar]
- Das, I.; Dennis, J.E. Normal-boundary intersection: A new method for generating the Pareto surface in nonlinear multicriteria optimization problems. SIAM J. Optim. 1998, 8, 631–657. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multiobjective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Van Moffaert, K.; Nowé, A. Multi-objective reinforcement learning using sets of pareto dominating policies. J. Mach. Learn. Res. 2014, 15, 3483–3512. [Google Scholar]
- Leng, J.; Wang, X.; Wu, S.; Jin, C.; Tang, M.; Liu, R.; Vogl, A.; Liu, H. A multi-objective reinforcement learning approach for resequencing scheduling problems in automotive manufacturing systems. Int. J. Prod. Res. 2022, 61, 5156–5175. [Google Scholar] [CrossRef]
- Decerle, J.; Grunder, O.; El Hassani, A.H.; Barakat, O. A memetic algorithm for a home health care routing and scheduling problem. Oper. Res. Health Care 2018, 16, 59–71. [Google Scholar] [CrossRef]
- Grenouilleau, F.; Legrain, A.; Lahrichi, N.; Rousseau, L.M. A set partitioning heuristic for the home health care routing and scheduling problem. Eur. J. Oper. Res. 2019, 275, 295–303. [Google Scholar] [CrossRef]
- Yang, M.; Ni, Y.; Yang, L. A multi-objective consistent home healthcare routing and scheduling problem in an uncertain environment. Comput. Ind. Eng. 2021, 160, 107560. [Google Scholar] [CrossRef]
- Braekers, K.; Hartl, R.F.; Parragh, S.N.; Tricoire, F. A bi-objective home care scheduling problem: Analyzing the trade-off between costs and client inconvenience. Eur. J. Oper. Res. 2016, 248, 428–443. [Google Scholar] [CrossRef]
- Khodabandeh, P.; Kayvanfar, V.; Rafiee, M.; Werner, F. A bi-objective home health care routing and scheduling model with considering nurse downgrading costs. Int. J. Environ. Res. Public Health 2021, 18, 900. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Hajiaghaei-Keshteli, M.; Tavakkoli-Moghaddam, R. A bi-objective green home health care routing problem. J. Clean. Prod. 2018, 200, 423–443. [Google Scholar] [CrossRef]
- Li, X.; Tian, P.; Leung, S.C. Vehicle routing problems with time windows and stochastic travel and service times: Models and algorithm. Int. J. Prod. Econ. 2010, 125, 137–145. [Google Scholar] [CrossRef]
- Beyer, H.G.; Sendhoff, B. Robust optimization–a comprehensive survey. Comput. Methods Appl. Mech. Eng. 2007, 196, 3190–3218. [Google Scholar] [CrossRef]
- Shi, Y.; Boudouh, T.; Grunder, O.; Wang, D. Modeling and solving simultaneous delivery and pick-up problem with stochastic travel and service times in home health care. Expert Syst. Appl. 2018, 102, 218–233. [Google Scholar] [CrossRef]
- Bazirha, M.; Kadrani, A.; Benmansour, R. Stochastic home health care routing and scheduling problem with multiple synchronized services. Ann. Oper. Res. 2023, 320, 573–601. [Google Scholar] [CrossRef]
- Fathollahi-Fard, A.M.; Ahmadi, A.; Goodarzian, F.; Cheikhrouhou, N. A bi-objective home healthcare routing and scheduling problem considering patients’ satisfaction in a fuzzy environment. Appl. Soft Comput. 2020, 93, 106385. [Google Scholar] [CrossRef] [PubMed]
- Bahri, O.; Talbi, E.G.; Amodeo, L. Use of electric vehicles in home-health care routing problems: Analysis of a multi-objective approach under uncertainty. IFAC-PapersOnLine 2021, 54, 127–132. [Google Scholar] [CrossRef]
- Shi, Y.; Boudouh, T.; Grunder, O. A robust optimization for a home health care routing and scheduling problem with consideration of uncertain travel and service times. Transp. Res. Part E Logist. Transp. Rev. 2019, 128, 52–95. [Google Scholar] [CrossRef]
- Naji, W.; Masmoudi, M.; Mellouli, R. A robust-MILP for synchronized-mTSPTW: Application to home health care under uncertainties. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 1089–1094. [Google Scholar]
- Shiri, M.; Ahmadizar, F.; Mahmoudzadeh, H. A three-phase methodology for home healthcare routing and scheduling under uncertainty. Comput. Ind. Eng. 2021, 158, 107416. [Google Scholar] [CrossRef]
- Yuan, B.; Liu, R.; Jiang, Z. A branch-and-price algorithm for the home health care scheduling and routing problem with stochastic service times and skill requirements. Int. J. Prod. Res. 2015, 53, 7450–7464. [Google Scholar] [CrossRef]
- Tosarkani, B.M.; Amin, S.H.; Zolfagharinia, H. A scenario-based robust possibilistic model for a multi-objective electronic reverse logistics network. Int. J. Prod. Econ. 2020, 224, 107557. [Google Scholar] [CrossRef]
- Gao, X.; Cao, C. A novel multi-objective scenario-based optimization model for sustainable reverse logistics supply chain network redesign considering facility reconstruction. J. Clean. Prod. 2020, 270, 122405. [Google Scholar] [CrossRef]
- Liu, J.; Qiao, F.; Kong, W. Scenario-based multi-objective robust scheduling for a semiconductor production line. Int. J. Prod. Res. 2019, 57, 6807–6826. [Google Scholar] [CrossRef]
- Maghouli, P.; Hosseini, S.H.; Buygi, M.O.; Shahidehpour, M. A scenario-based multi-objective model for multi-stage transmission expansion planning. IEEE Trans. Power Syst. 2010, 26, 470–478. [Google Scholar] [CrossRef]
- Niknam, T.; Azizipanah-Abarghooee, R.; Narimani, M.R. An efficient scenario-based stochastic programming framework for multi-objective optimal micro-grid operation. Appl. Energy 2012, 99, 455–470. [Google Scholar] [CrossRef]
- Liu, X.; Dabiri, A.; Wang, Y.; De Schutter, B. Real-Time Train Scheduling with Uncertain Passenger Flows: A Scenario-Based Distributed Model Predictive Control Approach. IEEE Trans. Intell. Transp. Syst. 2023, 1–14. [Google Scholar] [CrossRef]
- Gurobi Optimization, LLC. Gurobi Optimizer Reference Manual. 2023. Available online: https://www.gurobi.com/documentation/ (accessed on 1 March 2024).
- Tricoire, F. Multi-directional local search. Comput. Oper. Res. 2012, 39, 3089–3101. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Ropke, S.; Pisinger, D. An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transp. Sci. 2006, 40, 455–472. [Google Scholar] [CrossRef]
- Gutjahr, W.J.; Pichler, A. Stochastic multi-objective optimization: A survey on non-scalarizing methods. Ann. Oper. Res. 2016, 236, 475–499. [Google Scholar] [CrossRef]
- Abdelaziz, F.B. Solution approaches for the multiobjective stochastic programming. Eur. J. Oper. Res. 2012, 216, 1–16. [Google Scholar] [CrossRef]
- Campi, M.C.; Garatti, S. Introduction to the Scenario Approach; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2018. [Google Scholar]
- Gutjahr, W.J. Two metaheuristics for multiobjective stochastic combinatorial optimization. In Proceedings of the International Symposium on Stochastic Algorithms, Moscow, Russia, 20–22 October 2005; Springer: Berlin, Germany, 2005; pp. 116–125. [Google Scholar]
- Van Rossum, G.; Drake, F.L. Python 3 Reference Manual; CreateSpace: Scotts Valley, CA, USA, 2009. [Google Scholar]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Snoek, J.; Larochelle, H.; Adams, R.P. Practical bayesian optimization of machine learning algorithms. arXiv 2012, arXiv:1206.2944. [Google Scholar]
- Riquelme, N.; Von Lücken, C.; Baran, B. Performance metrics in multi-objective optimization. In Proceedings of the 2015 Latin American Computing Conference (CLEI), Arequipa, Peru, 19–23 October 2015; pp. 1–11. [Google Scholar]
- Audet, C.; Bigeon, J.; Cartier, D.; Le Digabel, S.; Salomon, L. Performance indicators in multiobjective optimization. Eur. J. Oper. Res. 2021, 292, 397–422. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | MOO | TW | WB | QC | Other | Methods |
|---|---|---|---|---|---|---|
| Liu, Yuan, and Jiang [12] | × | Lunch break | B&P | |||
| Shahnejat-Bushehri et al. [13] | × | × | Idle time, synchronization | SA, TS | ||
| Trautsamwieser et al. [14] | × | × | Over time, break time | VNS | ||
| Bertels and Fahle [15] | × | × | × | CP, TS | ||
| Decerle et al. [28] | × | × | × | Synchronization | MAMO | |
| Braekers et al. [31] | × | × | × | Patients inconvenience | MDLS | |
| Our study | × | × | × | × | ALNS-EMDLS |
| Notation | Definition |
|---|---|
| Sets | |
| N | set of patients |
| V | set of depot and patients |
| A | all arcs |
| K | set of caregivers |
| Q | set of levels of qualification |
| RC | set of requirements of patients for levels of caregivers |
| H | set of number of intervals divided by departure time |
| G | set of number of intervals divided by arrival time |
| Parameters | |
| i,j | index of patients |
| k | index of caregivers |
| travel cost between i and j | |
| travel time between i and j, is | |
| level of qualification of caregiver k | |
| requirement of patient i for qualification level of a caregiver | |
| service time of patient i | |
| time window of patient i | |
| m,n | minimal number of patients and maximal number of patients that one caregiver is able to visit |
| degree coefficient if departure time is located at interval | |
| degree coefficient if arrival time is located at interval | |
| Decision variables | |
| binary decision variable: 1 if caregiver k moves from i to j, 0 otherwise | |
| binary decision variable: 1 if patient i is served by caregiver k, 0 otherwise | |
| arrival time of caregiver k’s visit to patient i | |
| departure time that caregiver k leaves patient i | |
| continuous decision variable: the penalties that arrival time and departure time are outside of time windows | |
| auxiliary variables: continuous, | |
| binary decision variable: 1 if caregivers’ arrival (departure) time at patient i is located at () interval, 0 otherwise | |
| binary decision variable: 1 if caregiver arrives after |
| Notation | Definition | Value |
|---|---|---|
| score if | 21.38 | |
| score if | 18.93 | |
| score if | 7.08 | |
| coefficient of weight (see Formula (39)) | 0.68 | |
| the number of iterations to update weight | 4 | |
| the number of iterations of ANLS of each direction | 19 | |
| d | percentage of the objective value of the best solution | 0.13 |
| min | min | |||||||
|---|---|---|---|---|---|---|---|---|
| HV | S | N | TCPU | |||||
| Gurobi Solver | ||||||||
| 10-C1 | 128.64 | 52.00 | 32.00 | 147.69 | 0.72 | 0.15 | 4.00 | 293.13 |
| 10-C2 | 163.35 | 62.00 | 39.00 | 189.59 | 0.61 | 0.09 | 4.00 | 625.47 |
| 10-R1 | 194.47 | 85.00 | 21.00 | 258.70 | 0.68 | 0.07 | 6.00 | 233.86 |
| 10-R2 | 194.47 | 68.00 | 18.00 | 344.84 | 0.66 | 0.06 | 7.00 | 271.53 |
| 10-RC1 | 218.06 | 81.00 | 23.00 | 336.60 | 0.74 | 0.12 | 8.00 | 285.31 |
| 10-RC2 | 230.23 | 75.00 | 18.00 | 462.66 | 0.68 | 0.02 | 10.00 | 293.19 |
| ALNS-EMDLS | ||||||||
| 10-C1 | 128.64 | 52.00 | 33.00 | 153.64 | 0.74 | 0.15 | 4.00 | 21.35 |
| 10-C2 | 163.35 | 62.00 | 39.00 | 189.59 | 0.62 | 0.07 | 6.00 | 20.55 |
| 10-R1 | 194.47 | 85.00 | 21.00 | 258.70 | 0.69 | 0.12 | 8.00 | 23.15 |
| 10-R2 | 194.47 | 68.00 | 18.00 | 344.84 | 0.68 | 0.00 | 18.00 | 26.70 |
| 10-RC1 | 218.06 | 81.00 | 23.00 | 336.60 | 0.75 | 0.04 | 16.00 | 31.90 |
| 10-RC2 | 230.23 | 75.00 | 18.00 | 462.66 | 0.71 | 0.004 | 15.00 | 26.11 |
| % | 0.00 | 0.00 | 0.005 | 0.007 | 2.45 | −29.02 | 65.08 | −91.60 |
| ALNS-EMDLS | ||||||||
| 25-C1 | 182.33 | 108.00 | 12.50 | 527.05 | 0.76 | 0.06 | 25.75 | 64.08 |
| 25-C2 | 240.45 | 131.75 | 26.00 | 497.09 | 0.86 | 0.04 | 19.00 | 59.19 |
| 25-R1 | 352.94 | 162.00 | 48.75 | 500.59 | 0.66 | 0.05 | 19.00 | 60.40 |
| 25-R2 | 350.88 | 166.50 | 7.00 | 820.81 | 0.80 | 0.03 | 24.25 | 63.59 |
| 25-RC1 | 294.99 | 135.50 | 5.25 | 386.91 | 0.71 | 0.04 | 26.75 | 58.32 |
| 25-RC2 | 294.99 | 149.00 | 3.75 | 935.51 | 0.78 | 0.04 | 28.25 | 61.94 |
| 50-C1 | 344.90 | 226.25 | 20.50 | 1220.02 | 0.72 | 0.02 | 39.50 | 138.76 |
| 50-C2 | 447.31 | 176.00 | 27.50 | 1476.68 | 0.72 | 0.02 | 34.00 | 134.35 |
| 50-R1 | 564.50 | 360.25 | 139.25 | 947.44 | 0.77 | 0.06 | 29.50 | 136.68 |
| 50-R2 | 570.02 | 251.00 | 2.50 | 1419.08 | 0.73 | 0.02 | 36.00 | 139.71 |
| 50-RC1 | 529.73 | 235.00 | 26.00 | 665.48 | 0.63 | 0.04 | 29.50 | 144.86 |
| 50-RC2 | 591.95 | 253.75 | 1.75 | 1721.49 | 0.73 | 0.03 | 37.50 | 145.97 |
| 100-C1 | 823.09 | 414.25 | 38.75 | 3297.75 | 0.68 | 0.01 | 56.25 | 256.97 |
| 100-C2 | 887.19 | 501.25 | 41.75 | 3417.91 | 0.74 | 0.01 | 54.00 | 241.71 |
| 100-R1 | 935.09 | 621.75 | 141.00 | 1526.37 | 0.70 | 0.01 | 44.25 | 249.72 |
| 100-R2 | 941.73 | 530.50 | 14.25 | 2692.53 | 0.72 | 0.02 | 55.25 | 256.78 |
| 100-RC1 | 1006.43 | 613.50 | 108.25 | 1610.18 | 0.70 | 0.02 | 42.00 | 249.80 |
| 100-RC2 | 1019.04 | 468.50 | 8.50 | 3326.02 | 0.74 | 0.03 | 48.75 | 256.62 |
| min | min | |||||||
|---|---|---|---|---|---|---|---|---|
| S_EMDLS | HV | S | N | TCPU | ||||
| 25-C1 | 182.35 | 110.05 | 22.73 | 569.10 | 0.82 | 0.06 | 37.25 | 1318.99 |
| 25-C2 | 239.94 | 131.46 | 28.49 | 597.37 | 0.85 | 0.02 | 27.25 | 1256.51 |
| 25-R1 | 349.69 | 179.25 | 49.63 | 516.97 | 0.75 | 0.02 | 20.75 | 1176.40 |
| 25-R2 | 352.78 | 121.94 | 13.03 | 923.21 | 0.76 | 0.02 | 39.75 | 1306.94 |
| 25-RC1 | 294.99 | 114.43 | 9.89 | 390.71 | 0.67 | 0.01 | 37.25 | 1196.68 |
| 25-RC2 | 294.99 | 140.60 | 6.24 | 1129.41 | 0.82 | 0.02 | 41.25 | 1357.98 |
| 50-C1 | 347.27 | 219.11 | 39.74 | 1375.92 | 0.80 | 0.02 | 47.50 | 2985.87 |
| 50-C2 | 449.06 | 199.25 | 33.66 | 1618.00 | 0.78 | 0.02 | 47.50 | 2766.20 |
| 50-R1 | 568.73 | 298.00 | 143.21 | 1020.79 | 0.81 | 0.05 | 26.00 | 3034.78 |
| 50-R2 | 566.30 | 248.64 | 15.29 | 1624.68 | 0.75 | 0.02 | 49.00 | 2954.02 |
| 50-RC1 | 539.62 | 222.38 | 40.75 | 737.78 | 0.74 | 0.04 | 31.50 | 2819.57 |
| 50-RC2 | 570.14 | 231.47 | 5.62 | 2235.57 | 0.76 | 0.02 | 48.25 | 2991.65 |
| 100-C1 | 831.97 | 485.78 | 73.61 | 3591.33 | 0.74 | 0.01 | 63.75 | 6370.87 |
| 100-C2 | 916.35 | 459.38 | 65.52 | 3754.04 | 0.77 | 0.01 | 61.75 | 5635.48 |
| 100-R1 | 948.95 | 599.82 | 157.89 | 1758.63 | 0.69 | 0.01 | 40.25 | 5790.88 |
| 100-R2 | 947.37 | 539.87 | 42.95 | 2942.96 | 0.75 | 0.01 | 64.00 | 6022.64 |
| 100-RC1 | 1013.65 | 559.13 | 122.02 | 1727.37 | 0.70 | 0.02 | 45.00 | 5824.40 |
| 100-RC2 | 1016.62 | 463.38 | 19.54 | 3973.91 | 0.75 | 0.01 | 68.00 | 6000.49 |
| min | min | ||||
|---|---|---|---|---|---|
| D*_EMDLS | HV | ||||
| 25-C1 | 182.33 | 107.10 | 26.62 | 476.12 | 0.77 |
| 25-C2 | 240.45 | 126.21 | 30.70 | 542.94 | 0.87 |
| 25-R1 | 352.94 | 142.54 | 52.70 | 480.16 | 0.61 |
| 25-R2 | 350.88 | 150.13 | 16.83 | 826.24 | 0.79 |
| 25-RC1 | 294.99 | 122.17 | 10.97 | 386.25 | 0.68 |
| 25-RC2 | 294.99 | 139.35 | 10.41 | 947.57 | 0.78 |
| 50-C1 | 344.90 | 223.08 | 50.22 | 1141.53 | 0.74 |
| 50-C2 | 447.32 | 175.01 | 41.00 | 1452.68 | 0.74 |
| 50-R1 | 564.50 | 329.10 | 151.81 | 961.09 | 0.80 |
| 50-R2 | 570.02 | 232.62 | 25.47 | 1423.64 | 0.74 |
| 50-RC1 | 529.73 | 220.87 | 49.27 | 653.99 | 0.62 |
| 50-RC2 | 591.95 | 244.33 | 12.24 | 1814.66 | 0.74 |
| 100-C1 | 823.09 | 412.46 | 96.72 | 3250.29 | 0.71 |
| 100-C2 | 887.20 | 493.36 | 73.05 | 3258.56 | 0.74 |
| 100-R1 | 935.09 | 579.99 | 173.21 | 1544.58 | 0.68 |
| 100-R2 | 941.73 | 501.50 | 65.53 | 2739.26 | 0.73 |
| 100-RC1 | 1006.43 | 567.45 | 144.81 | 1623.38 | 0.68 |
| 100-RC2 | 1019.04 | 458.41 | 35.52 | 3588.20 | 0.76 |
| ANOVA | |||||
| F | 0.00 | 0.01 | 0.37 | 0.26 | 2.51 |
| p | 0.98 | 0.92 | 0.55 | 0.61 | 0.12 |
| D*_MDLS | Levels | D | NTC | NP | TC | P |
|---|---|---|---|---|---|---|
| ET | ||||||
| Small | , | 0.38 | 0.33 | 0.18 | 491.23 | 169.40 |
| Medium | , | 0.33 | 0.28 | 0.18 | 453.71 | 159.82 |
| Large | , | 0.40 | 0.37 | 0.16 | 479.28 | 154.78 |
| VD | ||||||
| Small | /3 | 0.38 | 0.33 | 0.18 | 425.81 | 119.06 |
| Medium | 0.57 | 0.37 | 0.43 | 436.65 | 156.08 | |
| Large | 0.40 | 0.37 | 0.16 | 479.28 | l154.78 |
| S_EMDLS | Levels | D | NTC | NP | TC | P |
|---|---|---|---|---|---|---|
| ET | ||||||
| Small | , | 0.39 | 0.34 | 0.19 | 492.77 | 163.08 |
| Medium | , | 0.34 | 0.30 | 0.15 | 464.14 | 154.40 |
| Large | , | 0.37 | 0.32 | 0.20 | 444.33 | 150.42 |
| VD | ||||||
| Small | /3 | 0.38 | 0.27 | 0.26 | 425.29 | 121.88 |
| Medium | 0.50 | 0.39 | 0.31 | 446.94 | 143.72 | |
| Large | 0.37 | 0.32 | 0.20 | 444.33 | 150.42 |
| Methods | |||||
|---|---|---|---|---|---|
| Travel cost | |||||
| D*_EMDLS | 425.81 | 436.65 | 404.40 | 479.28 | 412.53 |
| S_EMDLS | 425.29 | 446.94 | 414.51 | 444.33 | 413.67 |
| Penalty | |||||
| D*_EMDLS | 119.06 | 156.08 | 161.34 | 154.78 | 170.64 |
| S_EMDLS | 121.88 | 143.72 | 148.26 | 150.42 | 156.30 |
| Solutions | ||||||
|---|---|---|---|---|---|---|
| 17.87 | 206.36 | 28.96% | 71.11% | 298.99 | 806.27 | |
| 27.24 | 109.82 | 52.30% | 35.19% | 424.29 | 714.94 | |
| 49.81 | 66.42 | 45.33% | 28.30% | 263.57 | 677.99 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Wang, T.; Monteiro, T. A Bi-Objective Home Health Care Routing and Scheduling Problem under Uncertainty. Int. J. Environ. Res. Public Health 2024, 21, 377. https://doi.org/10.3390/ijerph21030377
Zhao J, Wang T, Monteiro T. A Bi-Objective Home Health Care Routing and Scheduling Problem under Uncertainty. International Journal of Environmental Research and Public Health. 2024; 21(3):377. https://doi.org/10.3390/ijerph21030377
Chicago/Turabian StyleZhao, Jiao, Tao Wang, and Thibaud Monteiro. 2024. "A Bi-Objective Home Health Care Routing and Scheduling Problem under Uncertainty" International Journal of Environmental Research and Public Health 21, no. 3: 377. https://doi.org/10.3390/ijerph21030377
APA StyleZhao, J., Wang, T., & Monteiro, T. (2024). A Bi-Objective Home Health Care Routing and Scheduling Problem under Uncertainty. International Journal of Environmental Research and Public Health, 21(3), 377. https://doi.org/10.3390/ijerph21030377