
A States of Matter Search-Based Approach for Solving the Problem of Intelligent Power Allocation in Plug-in Hybrid Electric Vehicles

 ,
, 
Abstract
:1. Introduction
2. Problem Formulation
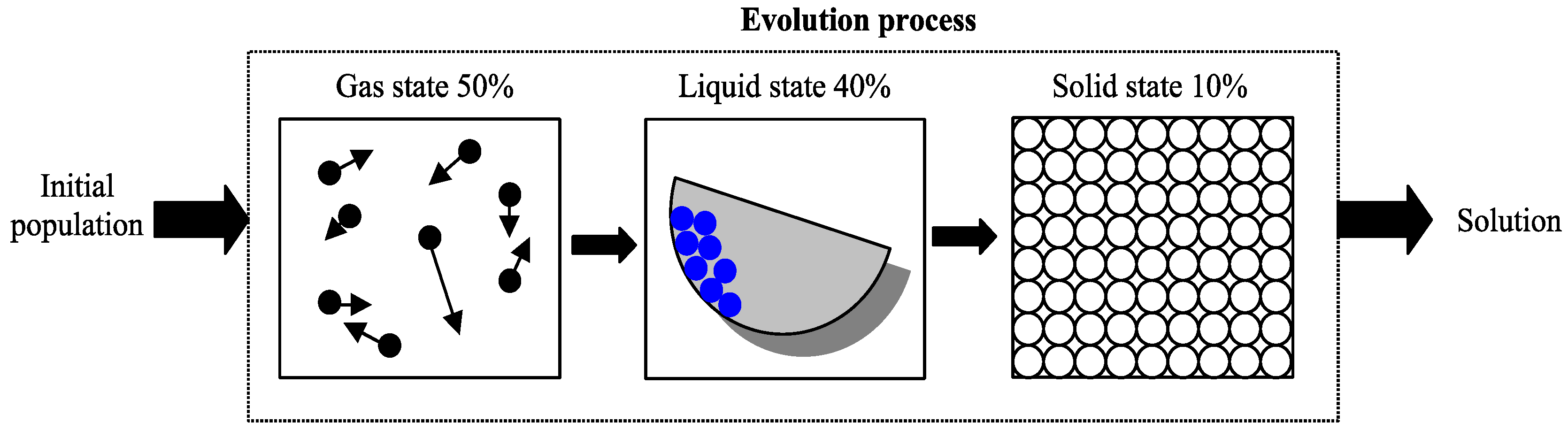
3. The States of Matter Search (SMS) Algorithm
3.1. States of Matter Transition
3.2. Molecule Movement Operators
3.2.1. Direction of Movement
3.2.2. Collisions
3.2.3. Random Behavior
4. SMS-Based Smart Power Allocation for PHEVs
5. Experimental Results
- (1)
- PSO: The Standard Particle Swarm Optimization (SPSO-2011) proposed in [20] was implemented. The algorithm’s learning factors were set to and .
- (2)
- GSA: The initial gravitation constant value has been set to , while the constant parameter alpha has been set to , as given in [21].
- (3)
- FA: The parameters setup for the randomness factor and the light absorption coefficient are set to and respectively, as illustrated on its own reference [22].
- (4)
- GA: The crossover and mutation probabilities are both set to and respectively [24].
- (5)
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Energy Technology Perspectives: Scenarios & Strategies to 2050. Available online: https://www.iea.org/textbase/npsum/etp.pdf (accessed on 6 November 2016).
- Markel, T.; Smith, K.; Pesaran, A.A. Improving Petroleum Displacement Potential of PHEVs Using Enhanced Charging Scenarios. In Proceedings of the EVS-24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Stavanger, Norway, 13–16 May 2009.
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Rosen, M.A. Intelligent optimization to integrate a plug-in hybrid electric vehicle smart parking lot with renewable energy resources and enhance grid characteristics. Energy Convers. Manag. 2014, 77, 250–261. [Google Scholar] [CrossRef]
- Soares, J.; Sousa, T.; Morais, H.; Vale, Z.; Canizes, B.; Silva, A. Application-Specific Modified Particle Swarm Optimization for energy resource scheduling considering vehicle-to-grid. Appl. Soft Comput. 2013, 13, 4264–4280. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.Y. Investigating a large-scale PHEV/PEV parking deck in a smart grid environment. In Proceedings of the 2011 North American Power Symposium, Boston, MA, USA, 4–6 August 2011; pp. 1–6.
- Su, W.; Chow, M.Y. Computational intelligence-based energy management for a large-scale PHEV/PEV enabled municipal parking deck. Appl. Energy 2012, 96, 171–182. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Optimization Algorithms; Elsevier: London, UK, 2014. [Google Scholar]
- Bhattacharyya, S.; Dutta, P. Handbook of Research on Swarm Intelligence in Engineering; IGI Global: Hersey, PA, USA, 2015. [Google Scholar]
- Rahman, I.; Vasant, P.M.; Singh, B.S.M.; Abdullah-Al-Wadud, M. On the performance of accelerated particle swarm optimization for charging plug-in hybrid electric vehicles. Alex. Eng. J. 2016, 55, 419–426. [Google Scholar] [CrossRef]
- Qin, J.; Yin, Y.; Ban, X. A Hybrid of Particle Swarm Optimization and Local Search for Multimodal Functions. Lect. Notes Comput. Sci. 2010, 6145, 589–596. [Google Scholar]
- Darzi, S.; Tiong, S.K.; Islam, M.T.; Soleymanpour, H.R.; Kibria, S.; Barrettand, M.; Arnott, R.; Capon, J.; Dahrouj, H.; Yu, W.; et al. An Experience Oriented-Convergence Improved Gravitational Search Algorithm for Minimum Variance Distortionless Response Beamforming Optimum. PLoS ONE 2016, 11, e0156749. [Google Scholar] [CrossRef] [PubMed]
- Cuevas, E.; Echavarría, A.; Ramírez-Ortegón, M.A. An optimization algorithm inspired by the States of Matter that improves the balance between exploration and exploitation. Appl. Intell. 2014, 40, 256–272. [Google Scholar] [CrossRef]
- Chang, W.Y. The State of Charge Estimating Methods for Battery: A Review. ISRN Appl. Math. 2013, 2013, 953792. [Google Scholar] [CrossRef]
- Rahman, I.; Vasant, P.M.; Singh, B.S.M.; Abdullah-Al-Wadud, M. Swarm Intelligence-Based Smart Energy Allocation Strategy for Charging Stations of Plug-In Hybrid Electric Vehicles. Math. Probl. Eng. 2015, 2015, 620425. [Google Scholar] [CrossRef]
- Su, W.; Chow, M.Y. Performance evaluation of a PHEV parking station using Particle Swarm Optimization. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–6.
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric Vehicle Battery Technologies; Springer: New York, NY, USA, 2013. [Google Scholar]
- Samadi, P.; Mohsenian-Rad, A.H.; Schober, R.; Wong, V.W.S.; Jatskevich, J. Optimal Real-Time Pricing Algorithm Based on Utility Maximization for Smart Grid. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications, Gaithersburg, MD, USA, 4–6 October 2010; pp. 415–420.
- Cengel, Y.A.; Boles, M.A. Thermodynamics: An Engineering Approach, 5th ed.; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
- Cuevas, E.; Echavarría, A.; Zaldívar, D.; Pérez-Cisneros, M. A novel evolutionary algorithm inspired by the states of matter for template matching. Expert Syst. Appl. 2013, 40, 6359–6373. [Google Scholar] [CrossRef]
- Zambrano-Bigiarini, M.; Clerc, M.; Rojas, R. Standard Particle Swarm Optimisation 2011 at CEC-2013: A baseline for future PSO improvements. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 2337–2344.
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly Algorithm, Lévy Flights and Global Optimization. In Research and Development in Intelligent Systems XXVI; Springer: London, UK, 2010; pp. 209–218. [Google Scholar]
- Melanie, M. An Introduction to Genetic Algorithms; Massachusetts Institute of Technology (MIT) Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Schmitt, L.M. Theory of genetic algorithms. Theor. Comput. Sci. 2001, 259, 1–61. [Google Scholar] [CrossRef]
- Wilcoxon, F. Individual Comparisons by Ranking Methods. Biom. Bull. 1945, 1, 80–83. [Google Scholar] [CrossRef]
- García, S.; Molina, D.; Lozano, M.; Herrera, F. A study on the use of non-parametric tests for analyzing the evolutionary algorithms’ behaviour: A case study on the CEC’2005 Special Session on Real Parameter Optimization. J. Heuristics 2009, 15, 617–644. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Values |
|---|---|---|
| Fixed parameters | PHEV’s maximum power absorption Charging station efficiency Total charging time (time step length) | min (1200 s) |
| Variables | PHEV’s State of Charge (SoC) PHEV’s battery capacity | |
| Constraints | PHEVs’ total absorbed power PHEV’s State of Charge (SoC) PHEV’s power absorption |
| Stage | Duration | ||||
|---|---|---|---|---|---|
| Gas | 50% | 0.8 | 0.8 | [0.8, 1.0] | 0.9 |
| Liquid | 40% | 0.4 | 0.2 | [0.0, 0.6] | 0.2 |
| Solid | 10% | 0.1 | 0.0 | [0.0, 0.1] | 0.0 |
| Fitness J(k) | PHEVs | |||||
|---|---|---|---|---|---|---|
| 50 | 100 | 300 | 500 | 1000 | ||
| RCA | AB | 1.489 × 104 | 2.634 × 104 | 9.077 × 104 | 1.501 × 105 | 3.392 × 105 |
| MB | 1.483 × 104 | 2.486 × 104 | 9.272 × 104 | 1.470 × 105 | 3.678 × 105 | |
| SD | 4.025 × 103 | 6.016 × 103 | 1.713 × 104 | 3.320 × 104 | 9.788 × 103 | |
| FA | AB | 1.827 × 104 | 3.401 × 104 | 1.163 × 105 | 1.923 × 105 | 1.764 × 105 |
| MB | 1.845 × 104 | 3.433 × 104 | 1.174 × 105 | 1.964 × 105 | 2.195 × 105 | |
| SD | 1.033 × 103 | 1.850 × 103 | 5.077 × 103 | 5.646 × 103 | 7.724 × 104 | |
| PSO | AB | 1.615 × 104 | 3.271 × 104 | 7.632 × 104 | 1.848 × 105 | 2.624 × 105 |
| MB | 1.770 × 104 | 3.615 × 104 | 7.993 × 104 | 2.179 × 105 | 2.781 × 105 | |
| SD | 2.068 × 103 | 3.911 × 103 | 4.154 × 103 | 2.961 × 104 | 8.367 × 104 | |
| GSA | AB | 1.648 × 104 | 3.367 × 104 | 1.156 × 105 | 1.886 × 105 | 2.899 × 105 |
| MB | 1.834 × 104 | 3.791 × 104 | 1.271 × 105 | 2.011 × 105 | 2.906 × 105 | |
| SD | 3.787 × 103 | 8.139 × 103 | 2.055 × 104 | 2.907 × 104 | 5.559 × 104 | |
| GA | AB | 1.777 × 104 | 3.428 × 104 | 1.130 × 105 | 1.912 × 105 | 3.438 × 105 |
| MB | 1.788 × 104 | 3.532 × 104 | 1.140 × 105 | 1.952 × 105 | 4.424 × 105 | |
| SD | 9.499 × 102 | 1.780 × 103 | 4.680 × 103 | 5.893 × 103 | 1.352 × 104 | |
| SMS | AB | 1.864 × 104 | 3.939 × 104 | 1.214 × 105 | 2.067 × 105 | 3.892 × 105 |
| MB | 1.873 × 104 | 4.109 × 104 | 1.219 × 105 | 2.099 × 105 | 3.944 × 105 | |
| SD | 9.144 × 102 | 1.881 × 103 | 4.629 × 103 | 6.204 × 103 | 1.163 × 104 | |
| Number of PHEVs | Computational Time (s) | |||||
|---|---|---|---|---|---|---|
| SMS | GSA | PSO | GA | FA | RCA | |
| 50 | 60.868 | 130.825 | 45.158 | 80.372 | 57.438 | 12.950 |
| 100 | 69.177 | 149.800 | 48.880 | 101.528 | 74.495 | 14.151 |
| 300 | 129.290 | 237.898 | 60.616 | 143.652 | 112.866 | 22.177 |
| 500 | 163.656 | 317.460 | 70.735 | 196.335 | 149.650 | 27.128 |
| 1000 | 268.833 | 578.800 | 99.389 | 282.747 | 186.129 | 36.579 |
| PHEVs’ Charging Scenario | SMS vs. PSO | SMS vs. GSA | SMS vs. GA | SMS vs. FA | SMS vs. RCA |
|---|---|---|---|---|---|
| 50 | 6.301 × 10−17 | 7.713 × 10−18 | 7.066 × 10−16 | 7.066 × 10−17 | 2.852 × 10−10 |
| 100 | 7.504 × 10−15 | 7.504 × 10−17 | 1.617 × 10−16 | 5.025 × 10−15 | 7.713 × 10−10 |
| 300 | 4.253 × 10−13 | 3.946 × 10−14 | 2.084 × 10−13 | 9.148 × 10−13 | 9.726 × 10−8 |
| 500 | 2.907 × 10−10 | 2.449 × 10−13 | 8.238 × 10−10 | 2.823 × 10−12 | 5.628 × 10−6 |
| 1000 | 3.293 × 10−10 | 1.318 × 10−10 | 6.821 × 10−8 | 4.259 × 10−10 | 4.713 × 10−6 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valdivia-Gonzalez, A.; Zaldívar, D.; Fausto, F.; Camarena, O.; Cuevas, E.; Perez-Cisneros, M. A States of Matter Search-Based Approach for Solving the Problem of Intelligent Power Allocation in Plug-in Hybrid Electric Vehicles. Energies 2017, 10, 92. https://doi.org/10.3390/en10010092
Valdivia-Gonzalez A, Zaldívar D, Fausto F, Camarena O, Cuevas E, Perez-Cisneros M. A States of Matter Search-Based Approach for Solving the Problem of Intelligent Power Allocation in Plug-in Hybrid Electric Vehicles. Energies. 2017; 10(1):92. https://doi.org/10.3390/en10010092
Chicago/Turabian StyleValdivia-Gonzalez, Arturo, Daniel Zaldívar, Fernando Fausto, Octavio Camarena, Erik Cuevas, and Marco Perez-Cisneros. 2017. "A States of Matter Search-Based Approach for Solving the Problem of Intelligent Power Allocation in Plug-in Hybrid Electric Vehicles" Energies 10, no. 1: 92. https://doi.org/10.3390/en10010092
APA StyleValdivia-Gonzalez, A., Zaldívar, D., Fausto, F., Camarena, O., Cuevas, E., & Perez-Cisneros, M. (2017). A States of Matter Search-Based Approach for Solving the Problem of Intelligent Power Allocation in Plug-in Hybrid Electric Vehicles. Energies, 10(1), 92. https://doi.org/10.3390/en10010092