A Novel Multi-Phase Stochastic Model for Lithium-Ion Batteries’ Degradation with Regeneration Phenomena


Abstract
:
1. Introduction
2. Motivation and Problem Formulation
2.1. Motivation Example
- (1)
- In the testing data from CALCE, the rest time lasts several and even more hours, which is caused by the pause between two continuous charge/discharge tests. Therefore, we classify the degradation process of the battery into several phases according to the rest time.
- (2)
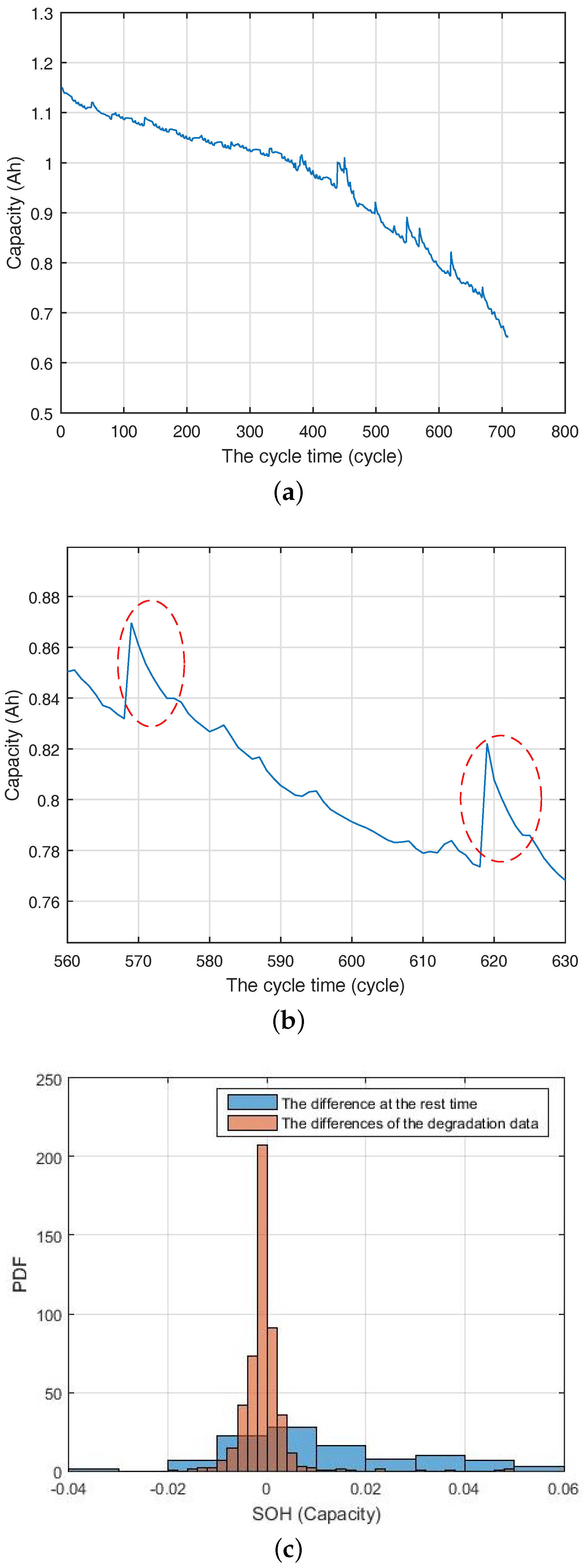
- The rest time does not only lead to regeneration phenomenon i.e., degradation state recovery but also unchanging and further deterioration. In Figure 1c, the blue lines denote the differences of the degradation data at the point of rest time, and the red lines represent the differences at other points, which are collected from the other four batteries CS2-35, CS2-36, CS2-37, CS2-38. It is interesting to note that the statistical histograms of these two differences data are distinguished obviously, including their means and variances. In another word, all regeneration phenomena occur at the rest time, but it does not mean that each testing rest leads to regeneration phenomenon.
- (3)
- When a regeneration phenomenon occurs, not only the degradation state will increase suddenly, but also the degradation rate changes as shown in Figure 1b, which is the enlarged figure of Figure 1a for better illustration. It is noteworthy that the degradation rate will first increase heavily after a regeneration phenomenon appears, and then decrease gradually and finally return to that at the end of the previous phase.
2.2. Formulation and Degradation Modeling
3. Remaining Useful Life Estimation under the Concept of the FPT
4. Parameter Estimation Based on the ECM Algorithm
4.1. Implementation Procedure
5. Case Study
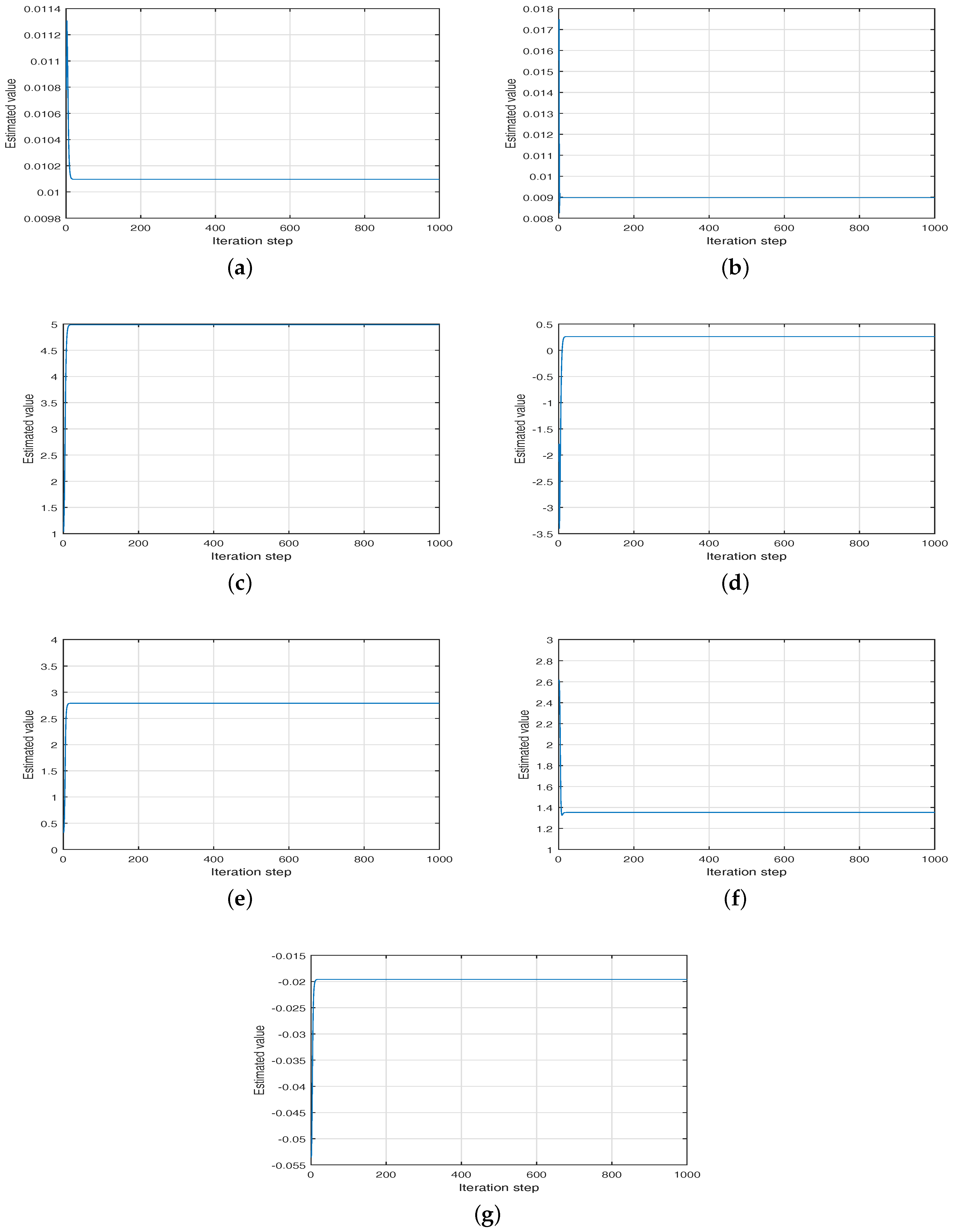
5.1. Numerical Example
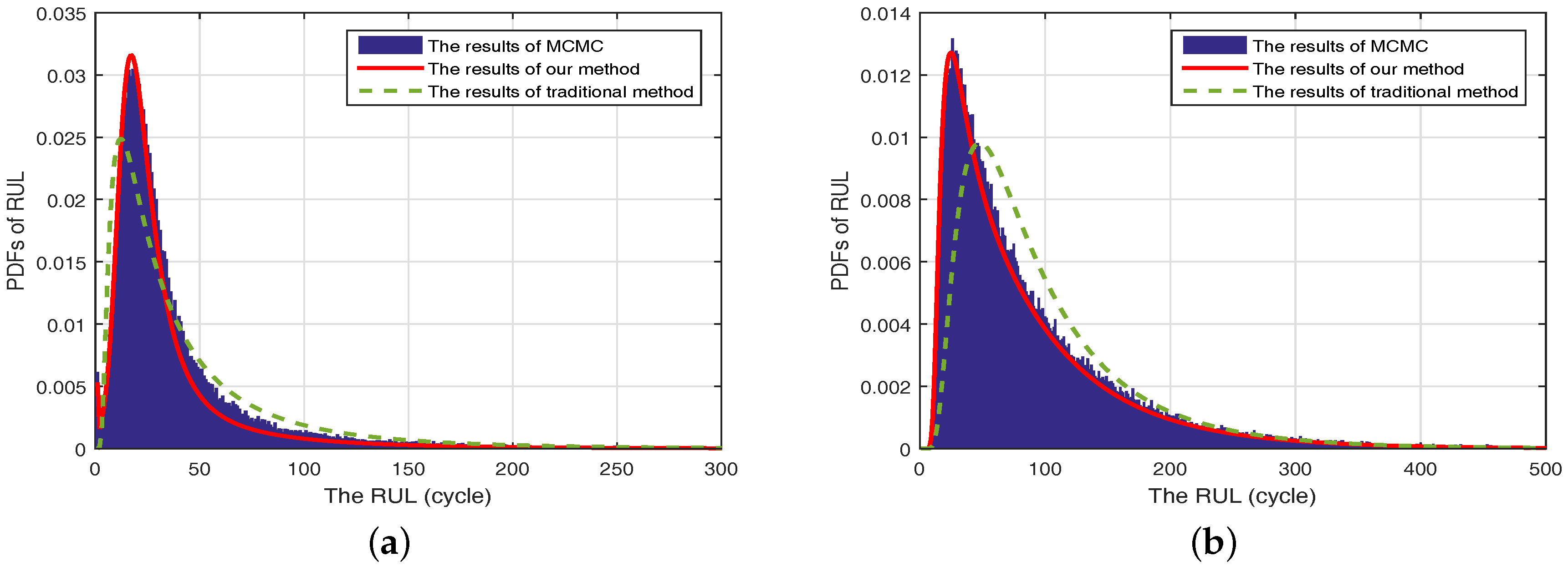
5.2. Practical Example
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| RUL | Remaining useful life |
| MLE | Maximum Likelihood Estimation |
| EM | Expectation maximum |
| ECM | Expectation conditional maximum |
| SOH | State of health |
| PHM | Prognostic and health management |
| FPT | First passage time |
| CALCE | Center for Advanced Life Cycle Engineering |
| Probability density function | |
| CDF | Cumulative distribution function |
| SMM | Semi-Markov model |
| MCMC | Markov Chain Monte Carlo |
Notation
| T | The lifetime |
| The RUL at time | |
| The whole degradation process | |
| The continuous degradation process without the effect of the regeneration phenomenon | |
| The changing degradation process caused by the i-th testing rest | |
| The occurrence number of testing rest at time t | |
| The occurrence time of i-th testing rest | |
| Total times of the testing rest | |
| The drift coefficient | |
| The diffusion coefficient | |
| The standard Brownian motion | |
| The initial value of degradation process | |
| The parameters of the model of the regeneration phenomenon | |
| , | The mean and variance of |
| , | The mean and variance of |
| The failure threshold | |
| The PDF of the lifetime | |
| The degradation state at time t | |
| The left limit of | |
| The j-th observation at i-th phase | |
| The difference of | |
| The difference of t | |
| , | Two functions of the time t |
| The transition probability from to under the concept of the FPT | |
| , | The PDFs of and |
| Take the expectation of | |
| The all parameters of the proposed model | |
| The estimate of | |
| The estimate of at the m-th iteration | |
| The all degradation observation data |
Appendix A
Appendix B
References
- Zhang, J.; Lee, J. A review on prognostics and health monitoring of Li-ion battery. J. Power Sources 2011, 196, 6007–6014. [Google Scholar] [CrossRef]
- Abada, S.; Marlair, G.; Lecocq, A.; Petit, M.; Sauvant-Moynot, V.; Huet, F. Safety focused modeling of lithium-ion batteries: A review. J. Power Sources 2016, 306, 178–192. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries using extended Kalman filtering. In Proceedings of the IMAPS Advanced Technology Workshop on High Reliability Microelectronics for Military Applications, Linthicum Heights, MD, USA, 17–19 May 2011; pp. 17–19. [Google Scholar]
- Si, X.S. An adaptive prognostic approach via nonlinear degradation modeling: Application to battery data. IEEE Trans. Ind. Electron. 2015, 62, 5082–5096. [Google Scholar] [CrossRef]
- Pecht, M. Prognostics and Health Management of Electronics; Wiley Online Library: Hoboken, NJ, USA, 2008. [Google Scholar]
- Zhang, J.X.; Hu, C.H.; He, X.; Si, X.S.; Liu, Y.; Zhou, D.H. Lifetime prognostics for deteriorating systems with time-varying random jumps. Reliab. Eng. Syst. Saf. 2017, 167, 338–350. [Google Scholar] [CrossRef]
- Tsui, K.L.; Chen, N.; Zhou, Q.; Hai, Y.; Wang, W. Prognostics and health management: A review on data driven approaches. Math. Probl. Eng. 2015, 2015, 1–17. [Google Scholar] [CrossRef]
- Zio, E. Prognostics and health management of industrial equipment. In Diagnostics and Prognostics of Engineering Systems: Methods and Techniques; IGI Global: Hershey, PA, USA, 2012; pp. 333–356. [Google Scholar]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Jardine, A.K.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Liu, D.; Pang, J.; Zhou, J.; Peng, Y.; Pecht, M. Prognostics for state of health estimation of lithium-ion batteries based on combination Gaussian process functional regression. Microelectron. Reliab. 2013, 53, 832–839. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium-ion batteries based on the wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Dalal, M.; Ma, J.; He, D. Lithium-ion battery life prognostic health management system using particle filtering framework. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2011, 225, 81–90. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K.; Poll, S.; Christophersen, J. Prognostics methods for battery health monitoring using a Bayesian framework. IEEE Trans. Instrum. Meas. 2009, 58, 291–296. [Google Scholar] [CrossRef]
- Song, Y.; Liu, D.; Yang, C.; Peng, Y.; Horaud, R.; Forbes, F.; Yguel, M.; Dewaele, G.; Zhang, J. Data-driven hybrid remaining useful life estimation approach for spacecraft lithium-ion battery. Microelectron. Reliab. 2017, 75, 142–153. [Google Scholar]
- Panchal, S.; Dincer, I.; Agelin-Chaab, M.; Fraser, R.; Fowler, M. Experimental and simulated temperature variations in a LiFePO 4-20Ah battery during discharge process. Appl. Energy 2016, 180, 504–515. [Google Scholar] [CrossRef]
- Panchal, S.; Mcgrory, J.; Kong, J.; Fraser, R.; Fowler, M.; Dincer, I.; Agelin-Chaab, M. Cycling degradation testing and analysis of a LiFePO4 battery at actual conditions. Int. J. Energy Res. 2017, 1. [Google Scholar] [CrossRef]
- Williard, N.; He, W.; Hendricks, C.; Pecht, M. Lessons learned from the 787 dreamliner issue on lithium-ion battery reliability. Energies 2013, 6, 4682–4695. [Google Scholar] [CrossRef]
- Guo, J.; Li, Z.; Pecht, M. A Bayesian approach for Li-Ion battery capacity fade modeling and cycles to failure prognostics. J. Power Sources 2015, 281, 173–184. [Google Scholar] [CrossRef]
- Olivares, B.E.; Munoz, M.A.C.; Orchard, M.E.; Silva, J.F. Particle-filtering-based prognosis framework for energy storage devices with a statistical characterization of state-of-health regeneration phenomena. IEEE Trans. Instrum. Meas. 2013, 62, 364–376. [Google Scholar] [CrossRef]
- He, Y.J.; Shen, J.N.; Shen, J.F.; Ma, Z.F. State of health estimation of lithium-ion batteries: A multiscale Gaussian process regression modeling approach. AIChE J. 2015, 61, 1589–1600. [Google Scholar] [CrossRef]
- Orchard, M.E.; Lacalle, M.S.; Olivares, B.E.; Silva, J.F.; Palma-Behnke, R.; Estévez, P.A.; Severino, B.; Calderon-Muñoz, W.; Cortés-Carmona, M. Information-theoretic measures and sequential monte carlo methods for detection of regeneration phenomena in the degradation of lithium-ion battery cells. IEEE Trans. Reliab. 2015, 64, 701–709. [Google Scholar] [CrossRef]
- Qin, T.; Zeng, S.; Guo, J.; Skaf, Z. A Rest Time-Based Prognostic Framework for State of Health Estimation of Lithium-Ion Batteries with Regeneration Phenomena. Energies 2016, 9, 896. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Si, X.S.; Hu, C.H.; Pecht, M.G. A Prognostic Model for Stochastic Degrading Systems with State Recovery: Application to Li-Ion Batteries. IEEE Trans. Reliab. 2017, 1–6. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K. Modeling Li-ion battery capacity depletion in a particle filtering framework. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, USA, 27 September–1 October 2009; pp. 2909–2924. [Google Scholar]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H.; Pecht, M.G. Remaining useful life estimation based on a nonlinear diffusion degradation process. IEEE Trans. Reliab. 2012, 61, 50–67. [Google Scholar] [CrossRef]
- Kong, D.; Balakrishnan, N.; Cui, L. Two-Phase Degradation Process Model with Abrupt Jump at Change Point Governed by Wiener Process. IEEE Trans. Reliab. 2017. [Google Scholar] [CrossRef]
- Chen, N.; Ye, Z.S.; Xiang, Y.; Zhang, L. Condition-based maintenance using the inverse Gaussian degradation model. Eur. J. Oper. Res. 2015, 243, 190–199. [Google Scholar] [CrossRef]
- Lawless, J.; Crowder, M. Covariates and random effects in a gamma process model with application to degradation and failure. Lifetime Data Anal. 2004, 10, 213–227. [Google Scholar] [CrossRef] [PubMed]
- Chaari, R.; Briat, O.; Vinassa, J.M. Capacitance recovery analysis and modelling of supercapacitors during cycling ageing tests. Energy Convers. Manag. 2014, 82, 37–45. [Google Scholar] [CrossRef]
- Nagaraju, V.; Fiondella, L.; Zeephongsekul, P.; Jayasinghe, C.L.; Wandji, T. Performance Optimized Expectation Conditional Maximization Algorithms for Nonhomogeneous Poisson Process Software Reliability Models. IEEE Trans. Reliab. 2017, 66, 722–734. [Google Scholar] [CrossRef]
- Horaud, R.; Forbes, F.; Yguel, M.; Dewaele, G.; Zhang, J. Rigid and articulated point registration with expectation conditional maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 587–602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pecht, M. CALCE Battery Group. Available online: http://www.calce.umd.edu/batteries/data.htm (accessed on 11 September 2017).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Procedure: | |
|---|---|
| Step 1. | Collect the degradation data , and then obtain the occurrence number of rest time, i.e., ; |
| Step 2. | Transform into according to , and then obtain the difference of total observed data , where represents the j-th observation at i-th phase; |
| Step 3. | Regard and as the latent variables, and formulate the complete-data likelihood as shown in Equation (21). Let , and give the initial value .; |
| Step 4. | Calculate the conditional expectation of Equation (21), and then attain as shown in Equation (22), where denotes the estimates of all parameters at m-th iteration; |
| Step 5. | Fix , and obtain the estimates of other parameters via maximizing , where denotes all parameters except . Then the results can be found in Equations (24)–(26); |
| Step 6. | Fix , and derive via maximizing , which can be found in Equation (27); |
| Step 7. | Let , and repeat Step 4 to Step 6 until the estimates becomes convergence. Then such can be treated as the final estimates of . |
| Sample Size | ||||||||
|---|---|---|---|---|---|---|---|---|
| 2 | 0.0205 | 0.149 | 4.541 | −0.289 | 2.898 | 1.491 | 0.0204 | |
| 3 | 0.0148 | 0.072 | 4.516 | −0.214 | 2.720 | 1.428 | 0.0210 | |
| 4 | 0.0101 | 0.095 | 4.987 | 0.261 | 2.789 | 1.342 | 0.0196 | |
| 5 | True value | 0.0100 | 0.100 | 5.000 | 0.000 | 3.000 | 1.000 | 0.0200 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; He, X.; Si, X.; Hu, C.; Zhou, D. A Novel Multi-Phase Stochastic Model for Lithium-Ion Batteries’ Degradation with Regeneration Phenomena. Energies 2017, 10, 1687. https://doi.org/10.3390/en10111687
Zhang J, He X, Si X, Hu C, Zhou D. A Novel Multi-Phase Stochastic Model for Lithium-Ion Batteries’ Degradation with Regeneration Phenomena. Energies. 2017; 10(11):1687. https://doi.org/10.3390/en10111687
Chicago/Turabian StyleZhang, Jianxun, Xiao He, Xiaosheng Si, Changhua Hu, and Donghua Zhou. 2017. "A Novel Multi-Phase Stochastic Model for Lithium-Ion Batteries’ Degradation with Regeneration Phenomena" Energies 10, no. 11: 1687. https://doi.org/10.3390/en10111687
APA StyleZhang, J., He, X., Si, X., Hu, C., & Zhou, D. (2017). A Novel Multi-Phase Stochastic Model for Lithium-Ion Batteries’ Degradation with Regeneration Phenomena. Energies, 10(11), 1687. https://doi.org/10.3390/en10111687