Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback


Abstract
:1. Introduction
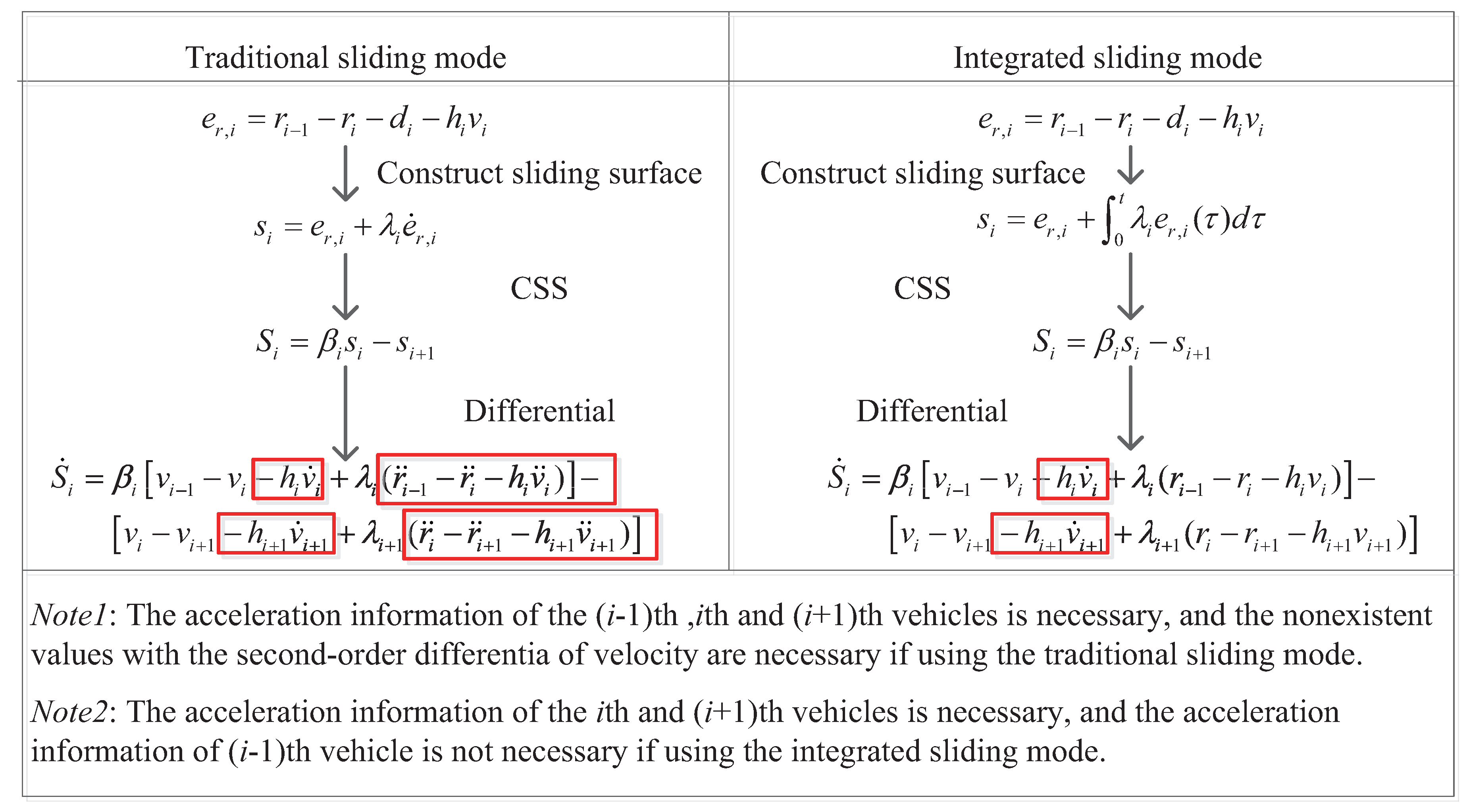
- First, a neural adaptive sliding-mode control algorithm is developed for a vehicle platoon with the CTH policy by using the ISM technique. Compared with the results in [31], the main advantage of this paper is that the CTH policy is more flexible than the CS policy [38]. This is because the CTH policy is related to velocity, not a rigid and constant value. Moreover, the proposed algorithm can release the acceleration information of followers.
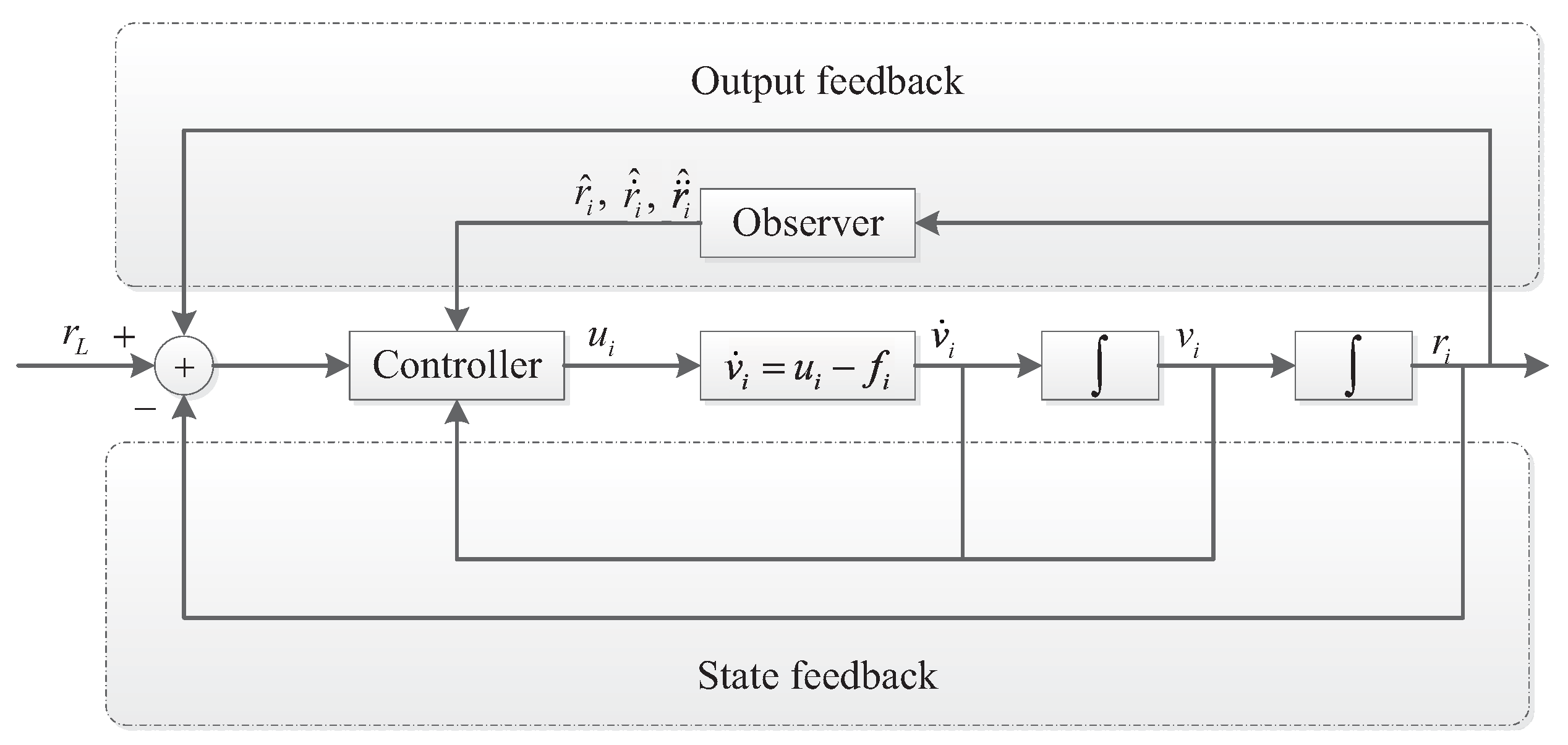
- To further reduce the communication load, we apply a higher order sliding-mode observer to estimate the information of velocity and acceleration. Based on this observer, a novel output feedback control algorithm is proposed for the multi-vehicle systems. The string stability of the whole vehicle platoon is proven by limiting the ratio, which takes into account the Laplace transform value of the i-th vehicle and its preceding vehicle.
2. Problems Formulation and Preliminaries
- The position tracking error of each vehicle in the platoon is bounded, i.e., , where is a small positive constant and represents the position tracking error defined in (4);
- The string stability of the whole vehicle platoon can be guaranteed, i.e., ;
- The control algorithm uses few the information of vehicles.
3. Main Results
3.1. Neural Adaptive Control Algorithm Using State Feedback
- The coefficients’ estimation error , and the signal are bounded, as well as converging to the following compact regions, respectively.where the detailed definition of φ and w is given later.
- The string stability of the whole vehicle platoon is guaranteed, i.e., .
3.2. Neural Adaptive Control Algorithm Using Output Feedback
- The coefficients’ estimation error , and the signal are bounded and converge to the following compact sets:where the detailed definition of and is shown later.
- The string stability of the whole vehicle platoon is guaranteed, i.e., .
4. Numerical Simulations
4.1. Simulation Setup
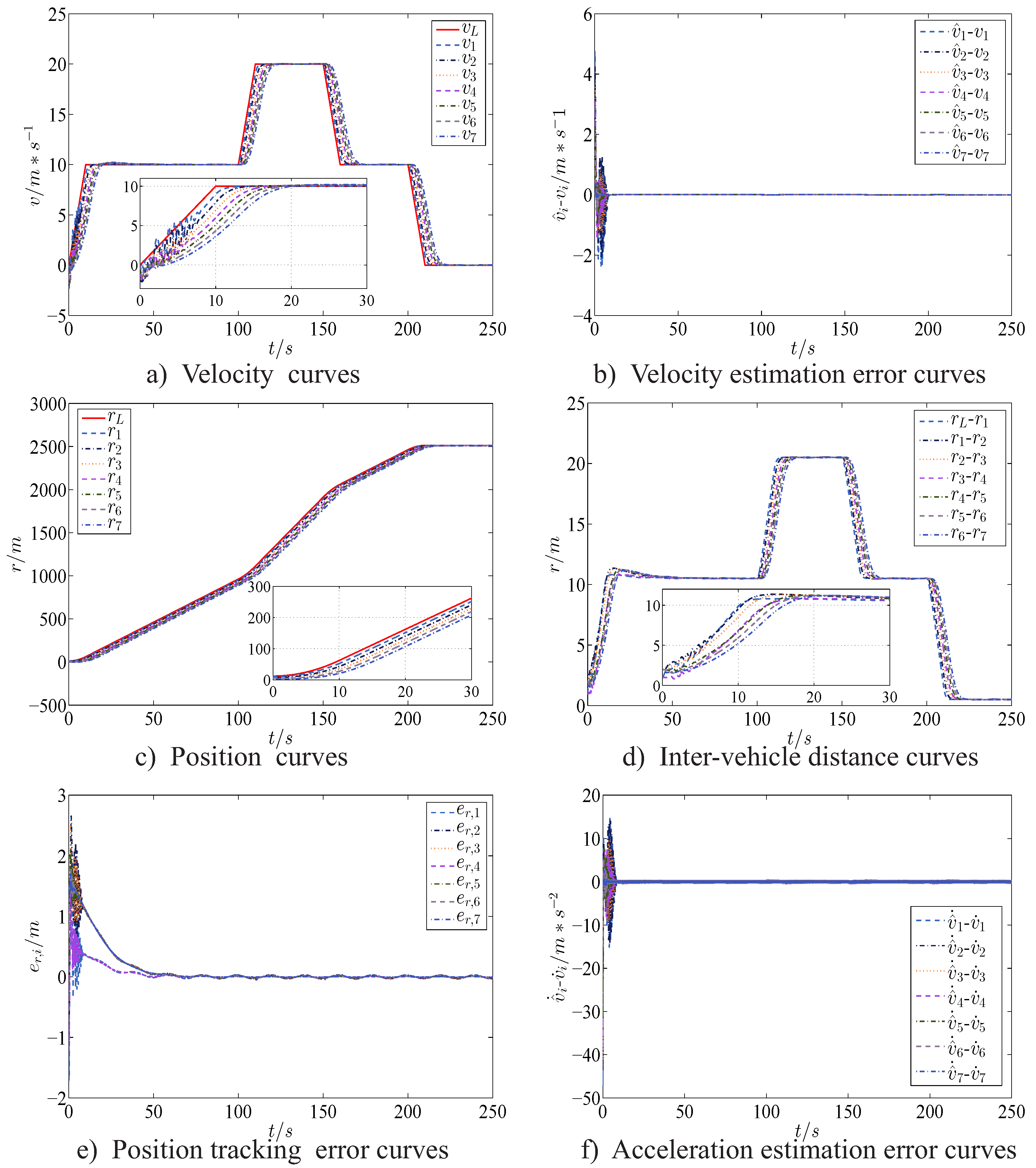
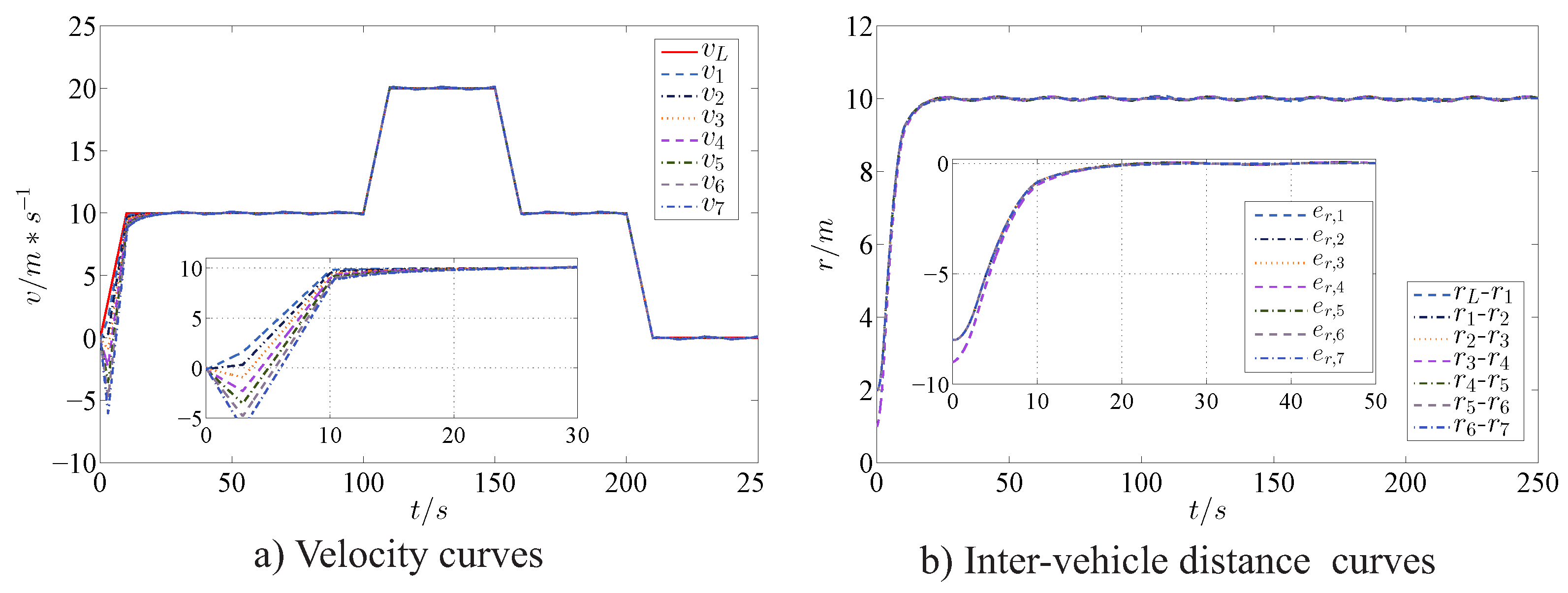
4.2. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tsugawa, S.; Jeschke, S.; Shladover, S.E. A review of truck platooning projects for energy savings. IEEE Trans. Intell. Veh. 2016, 1, 68–77. [Google Scholar] [CrossRef]
- Englund, C.; Chen, L.; Ploeg, J.; Semsar-Kazerooni, E.; Voronov, A.; Bengtsson, H.H.; Didoff, J. The grand cooperative driving challenge 2016: Boosting the introduction of cooperative automated vehicles. IEEE Wirel. Commun. 2016, 23, 146–152. [Google Scholar] [CrossRef]
- Robinson, T.; Chan, E.; Coelingh, E. Operating platoons on public motorways: An introduction to the sartre platooning programme. In Proceedings of the 17th World Congress on Intelligent Transport Systems, Busan, Korean, 25–29 October 2010; pp. 1–11. [Google Scholar]
- Tsugawa, S.; Kato, S.; Aoki, K. An automated truck platoon for energy saving. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 4109–4114. [Google Scholar]
- Besselink, B.; Johansson, K.H. String stability and a delay-based spacing policy for vehicle platoons subject to disturbances. IEEE Trans. Autom. Control 2017, 62, 4376–4391. [Google Scholar] [CrossRef]
- Lin, F.; Fardad, M.; Jovanović, M.R. Algorithms for leader selection in stochastically forced consensus networks. IEEE Trans. Autom. Control 2014, 59, 1789–1802. [Google Scholar] [CrossRef]
- Bernardo, M.D.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Trans. Intell. Transp. Syst. 2015, 16, 102–112. [Google Scholar] [CrossRef]
- Ali, A.; Garcia, G.; Martinet, P. The flatbed platoon towing model for safe and dense platooning on highways. IEEE Intell. Transp. Syst. Mag. 2015, 7, 58–68. [Google Scholar] [CrossRef]
- Herman, I.; Dan, M.; Hurák, Z.; Šebek, M. Nonzero bound on fiedler eigenvalue causes exponential growth of H-Infinity norm of vehicular platoon. IEEE Trans. Autom. Control 2015, 60, 2248–2253. [Google Scholar] [CrossRef]
- Wu, Y.; Li, S.E.; Zheng, Y.; Hedrick, J.K. Distributed sliding mode control for multi-vehicle systems with positive definite topologies. In Proceedings of the IEEE 55th Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 5213–5219. [Google Scholar]
- Xiao, L.; Gao, F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1184–1194. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Caveney, D.S. Distributed receding horizon control of vehicle platoons: Stability and string stability. IEEE Trans. Autom. Control 2012, 57, 620–633. [Google Scholar] [CrossRef]
- Hao, H.; Barooah, P. On achieving size-independent stability margin of vehicular lattice formations with distributed control. IEEE Trans. Autom. Control 2011, 57, 2688–2694. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Wang, J.; Cao, D.; Li, K. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Trans. Intell. Transp. Syst. 2015, 17, 14–26. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Wang, L.Y. Stability margin improvement of vehicular platoon considering undirected topology and asymmetric Control. IEEE Trans. Control Syst. Technol. 2016, 24, 1253–1265. [Google Scholar] [CrossRef]
- Hao, H.; Barooah, P. Stability and robustness of large platoons of vehicles with double-integrator models and nearest neighbor interaction. Int. J. Robust Nonlinear Control 2013, 23, 2097–2122. [Google Scholar] [CrossRef]
- Kianfar, R.; Falcone, P.; Fredriksson, J. A receding horizon approach to string stable cooperative adaptive cruise control. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; pp. 734–739. [Google Scholar]
- Qin, J.; Ma, Q.; Shi, Y.; Kang, Y. On group synchronization for interacting clusters of heterogeneous systems. IEEE Trans. Cybern. 2017, 47, 4122–4133. [Google Scholar] [CrossRef] [PubMed]
- Mu, J.; Yan, X.G.; Spurgeon, S.K. Decentralised sliding mode control for a class of nonlinear interconnected systems. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 5170–5175. [Google Scholar]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced control in marine mechatronic systems: A survey. IEEE/ASME Trans. Mechatronics 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Tangerman, F.M.; Veerman, J.J.P.; Stosic, B.D. Asymmetric decentralized flocks. IEEE Trans. Autom. Control 2012, 57, 2844–2853. [Google Scholar] [CrossRef]
- Mu, B.; Zhang, k.; Shi, Y. Integral sliding mode flight controller design for a quadrotor and the application in a heterogeneous multi-agent system. IEEE Trans. Ind. Electron. 2017, 64, 9389–9398. [Google Scholar] [CrossRef]
- Alam, A.; Gattami, A.; Johansson, K.H.; Tomlin, C.J. Guaranteeing safety for heavy duty vehicle platooning: Safe set computations and experimental evaluations. Control Eng. Pract. 2014, 24, 33–41. [Google Scholar] [CrossRef]
- Mu, B.; Shi, Y.; Chen, J.; Chang, Y. Design and implementation of non-uniform sampling cooperative control on a group of two-wheeled mobile robots. IEEE Trans. Ind. Electron. 2017, 64, 5035–5044. [Google Scholar] [CrossRef]
- Guo, G.; Yue, W. Autonomous platoon control allowing range-limited sensors. IEEE Trans. Veh. Technol. 2012, 61, 2901–2912. [Google Scholar] [CrossRef]
- Qin, J.; Ma, Q.; Shi, Y.; Wang, L. Recent advances in consensus of multi-agent systems: A brief survey. IEEE Trans. Ind. Electron. 2017, 64, 4972–4983. [Google Scholar] [CrossRef]
- Ploeg, J.; Wouw, N.V.D.; Nijmeijer, H. Lp string stability of cascaded systems: Application to vehicle platooning. IEEE Trans. Control Syst. Technol. 2014, 22, 786–793. [Google Scholar] [CrossRef]
- Milanes, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 296–305. [Google Scholar] [CrossRef]
- Öncü, S.; Ploeg, J.; Wouw, N.V.D.; Nijmeijer, H. Cooperative adaptive cruise control: Network-aware analysis of string stability. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1527–1537. [Google Scholar] [CrossRef]
- Bernardo, M.D.; Falcone, P.; Salvi, A.; Santini, S. Design, analysis, and experimental validation of a distributed protocol for platooning in the presence of time-varying heterogeneous delays. IEEE Trans. Control Syst. Technol. 2016, 24, 413–427. [Google Scholar] [CrossRef]
- Kwon, J.W.; Chwa, D. Adaptive bidirectional platoon control using a coupled sliding mode control method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2040–2048. [Google Scholar] [CrossRef]
- Guo, X.; Wang, J.; Liao, F.; Teo, R.S.H. Distributed adaptive sliding mode control strategy for vehicle-following systems with nonlinear acceleration uncertainties. IEEE Trans. Veh. Technol. 2017, 66, 981–991. [Google Scholar] [CrossRef]
- Guo, X.; Wang, J.; Liao, F.; Teo, R.S.H. Distributed adaptive integrated-sliding-mode controller synthesis for string stability of vehicle platoons. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2419–2429. [Google Scholar] [CrossRef]
- Yan, X.G.; Spurgeon, S.K.; Orlov, Y. Output feedback control synthesis for non-linear time-delay systems using a sliding-mode observer. IMA J. Math. Control Inf. 2014, 31, 501–508. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Levant, A. Universal output-feedback siso controller. IFAC Proc. Vol. 2002, 35, 221–226. [Google Scholar] [CrossRef]
- Bayar, B.; Sajadi-Alamdari, S.A.; Viti, F.; Voos, H. Impact of different spacing policies for adaptive cruise control on traffic and energy consumption of electric vehicles. In Proceedings of the 24th Mediterranean Conference on Control and Automation, Athens, Greece, 21–24 June 2016; pp. 1349–1354. [Google Scholar]
- Klinge, S.; Middleton, R.H. Time headway requirements for string stability of homogeneous linear unidirectionally connected systems. In Proceedings of the IEEE Conference on Decision and Control, Shanghai, China, 15–18 December 2009; pp. 1992–1997. [Google Scholar]
- Gao, S.G.; Dong, H.R.; Ning, B.; Clive, R.; Chen, L.; Sun, X.B. Cooperative adaptive bidirectional control of a train platoon for efficient utility and string stability. Chin. Phys. B 2015, 24, 161–170. [Google Scholar] [CrossRef]
- Gao, S.G.; Dong, H.R.; Ning, B.; Chen, Y.; Sun, X. Adaptive fault-tolerant automatic train operation using RBF neural networks. Neural Comput. Appl. 2015, 26, 141–149. [Google Scholar] [CrossRef]
- Yanakiev, D.; Kanellakopoulos, I. Nonlinear spacing policies for automated heavy-duty vehicles. IEEE Trans. Veh. Technol. 1998, 47, 1365–1377. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 10 | 1 | 10 | 10 | 5 | 5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, M.; Song, J.; Zuo, L.; Yang, P. Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback. Energies 2017, 10, 1906. https://doi.org/10.3390/en10111906
Yan M, Song J, Zuo L, Yang P. Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback. Energies. 2017; 10(11):1906. https://doi.org/10.3390/en10111906
Chicago/Turabian StyleYan, Maode, Jiacheng Song, Lei Zuo, and Panpan Yang. 2017. "Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback" Energies 10, no. 11: 1906. https://doi.org/10.3390/en10111906
APA StyleYan, M., Song, J., Zuo, L., & Yang, P. (2017). Neural Adaptive Sliding-Mode Control of a Vehicle Platoon Using Output Feedback. Energies, 10(11), 1906. https://doi.org/10.3390/en10111906