Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System

 ,
,  and
and
Abstract
:1. Introduction
- To develop a simulation test-bed in Matlab/Simulink in which a CS is integrated to a grid-connected HPS having a wind turbine MPPT controlled subsystem, photovoltaic MPPT controlled subsystem and controlled SOFC with electrolyzer subsystem.
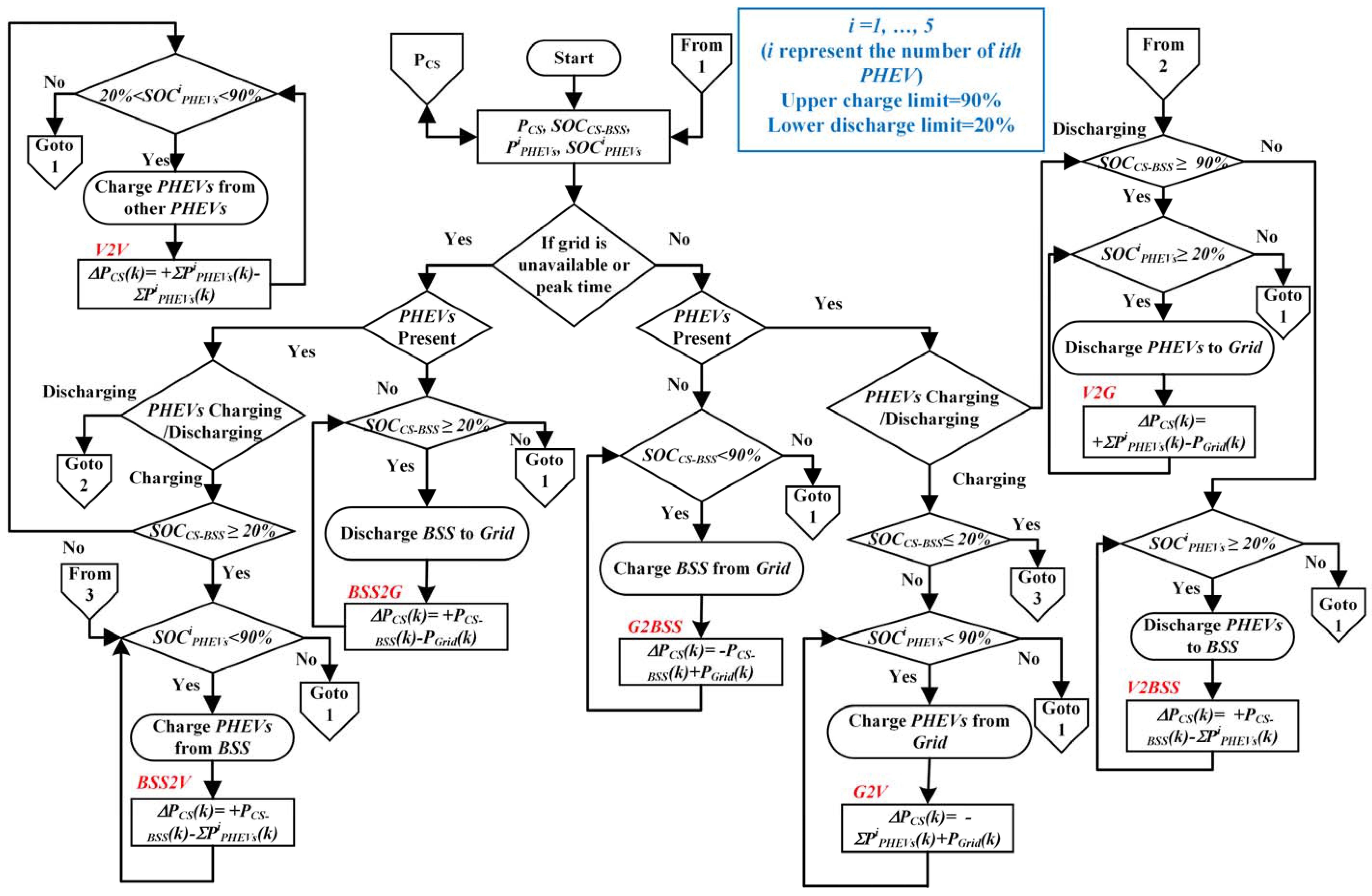
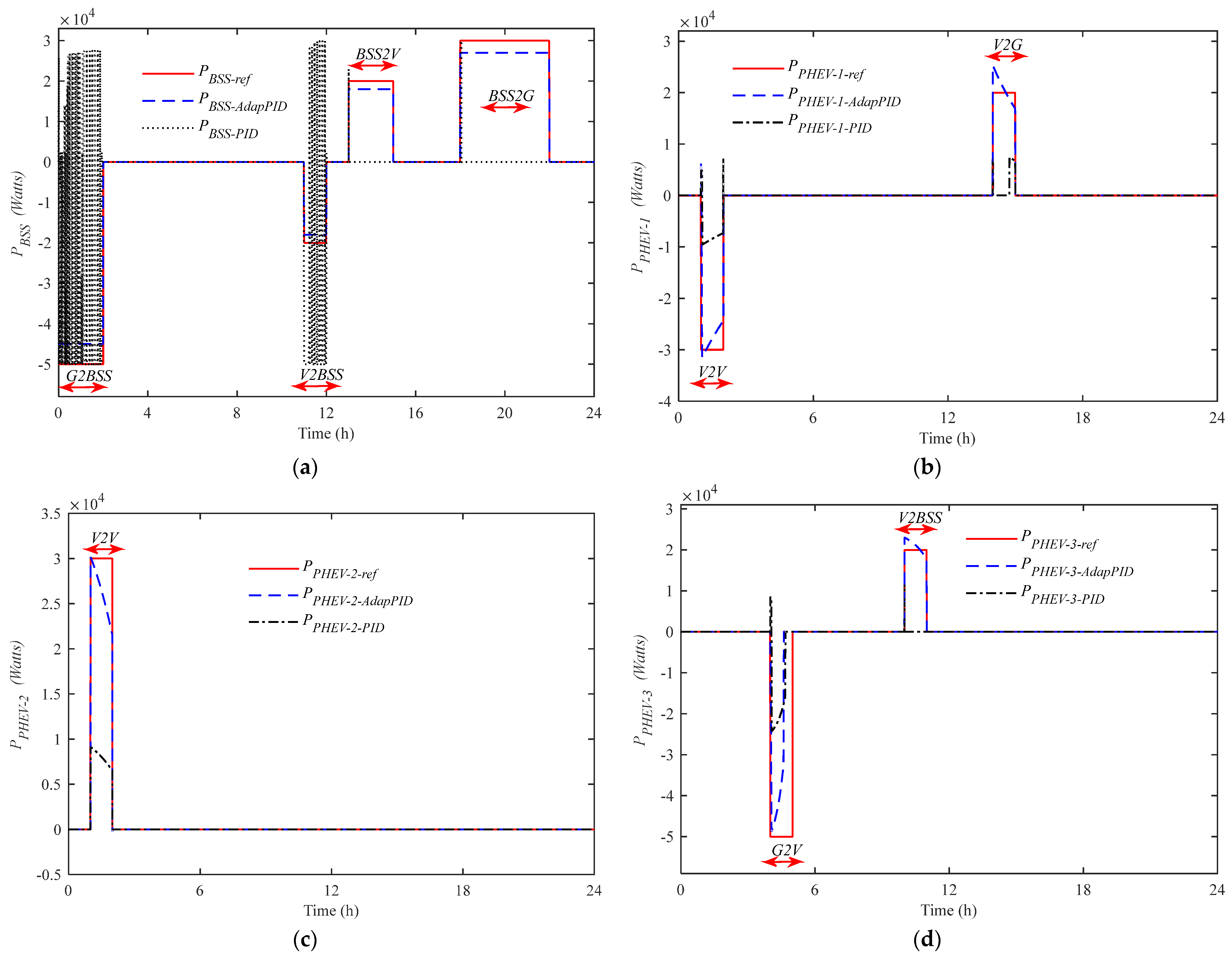
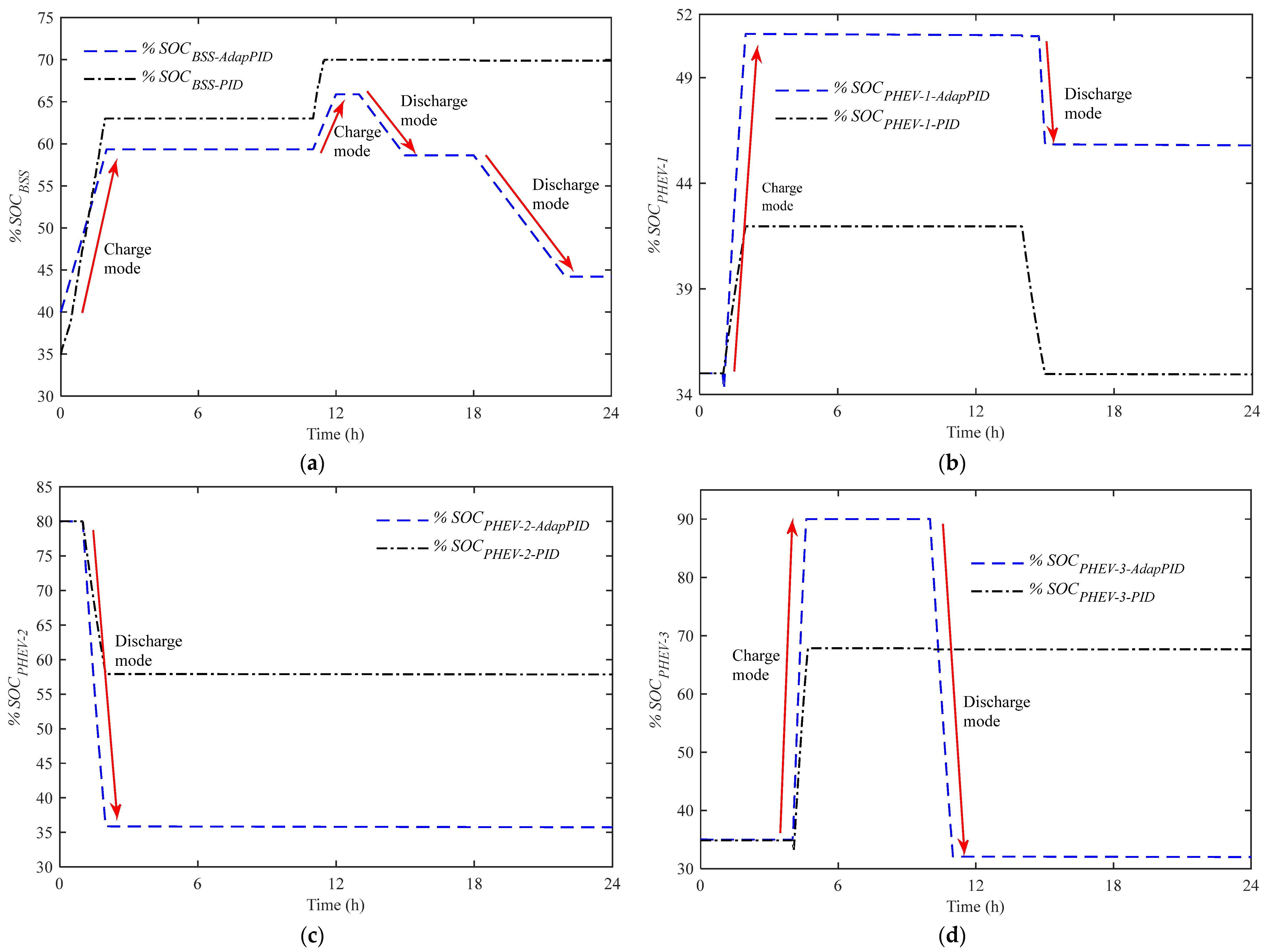
- To design an EMS for optimal power flow between five different PHEVs, CS and grid based on seven different scenarios which include G2V, V2G, grid-to-battery storage system (G2BSS), battery storage system-to-grid (BSS2G), battery storage system-to-vehicle (BSS2V), vehicle-to-battery storage system (V2BSS) and vehicle-to-vehicle (V2V).
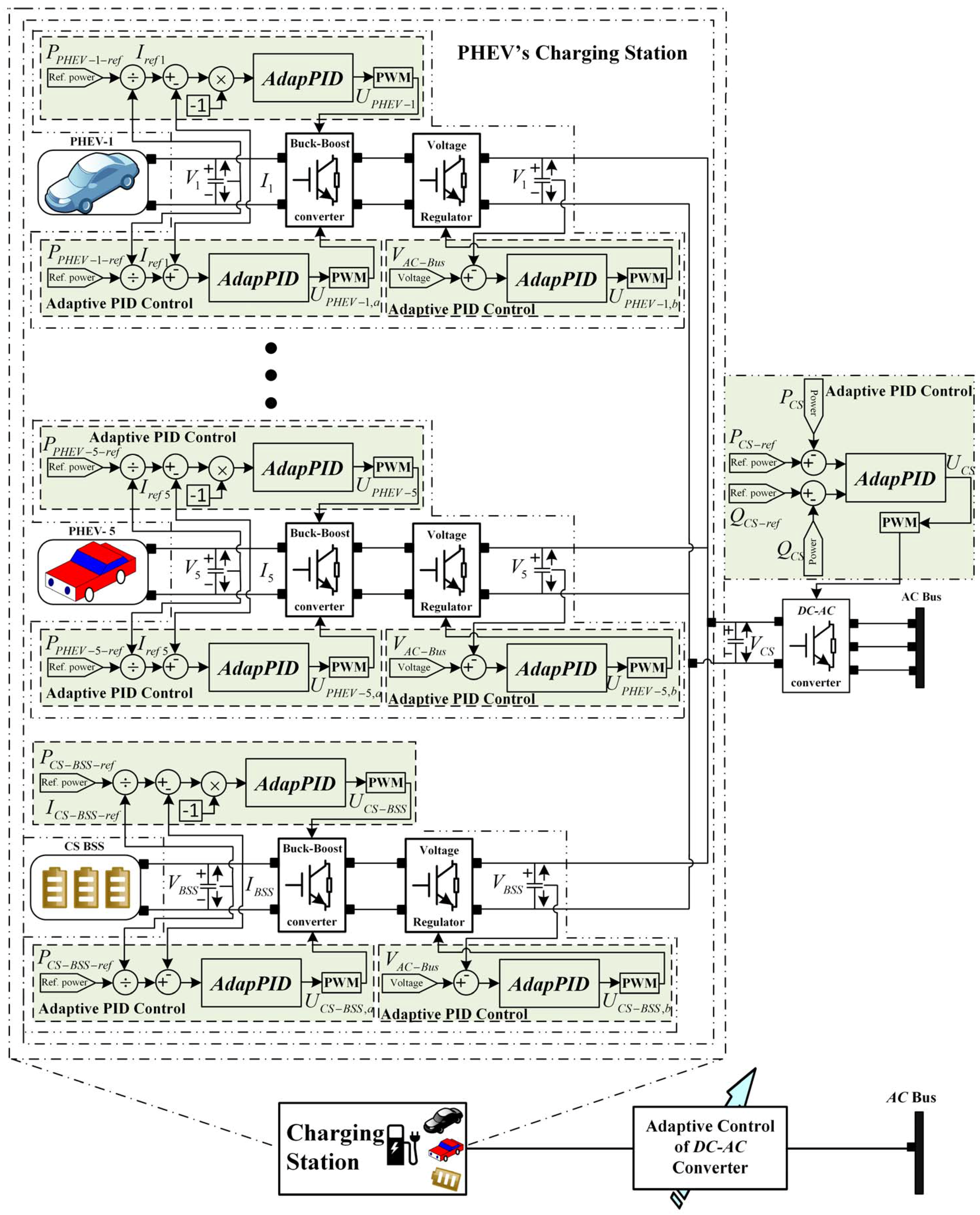
- To design an adaptive control paradigm for a non-renewable energy source (micro-turbine), storage system (battery and super-capacitor), grid side inverter and the charging station (CS converter, battery storage system (BSS), PHEVs).
2. System Description and Problem Formulation
2.1. Problem Formulation
2.2. Adaptive PID Control System Design
3. Energy Management System for the Charging Station
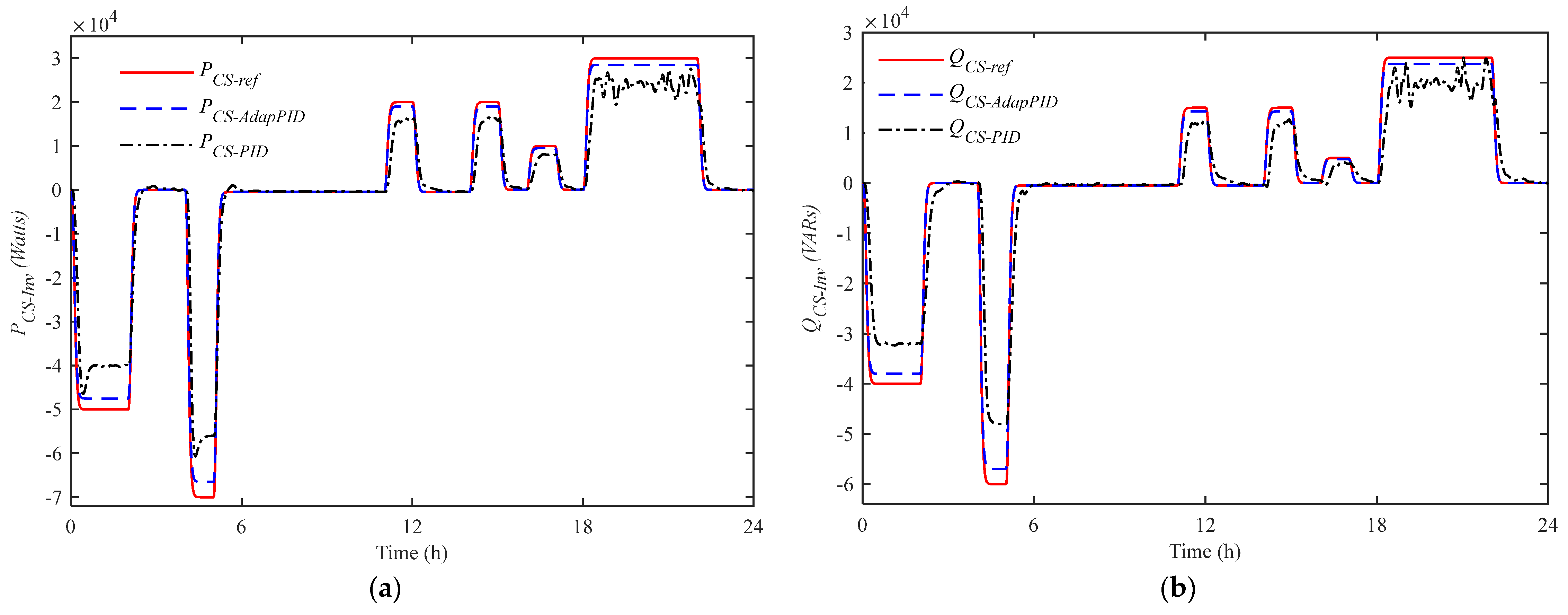
4. Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mohamed, A.; Salehi, V.; Ma, T.; Mohammed, O. Real-time energy management algorithm for plug-in hybrid electric vehicle charging parks involving sustainable energy. IEEE Trans. Sustain. Energy 2014, 2, 577–586. [Google Scholar] [CrossRef]
- Su, W.; Eichi, H.; Zeng, W.; Chow, M.-Y. A survey on the electrification of transportation in a smart grid environment. IEEE Trans. Ind. Inform. 2012, 1, 1–10. [Google Scholar] [CrossRef]
- Ashish, R.H.; Juvvanapudi, M.; Bajpai, P. Issues and solution approaches in PHEV integration to smart grid. Renew. Sustain. Energy Rev. 2014, 30, 217–229. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L.; Ahmed, S.; Bader, R. Indirect adaptive soft computing based wavelet-embedded control paradigms for WT/PV/SOFC in a grid/charging station connected hybrid power system. PLoS ONE 2017, 12, e0183750. [Google Scholar] [CrossRef]
- Syed, Z.H.; Li, H.; Kamal, T.; Arifoğlu, U.; Mumtaz, S.; Khan, K. Neuro-Fuzzy Wavelet Based Adaptive MPPT Algorithm for Photovoltaic Systems. Energies 2017, 10, 394. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L. Indirect adaptive neurofuzzy Hermite wavelet based control of PV in a grid-connected hybrid power system. Turk. J. Electr. Eng. Comput. 2017, 25, 4341–4353. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L. Adaptive control paradigm for photovoltaic and solid oxide fuel cell in a grid-integrated hybrid renewable energy system. PLoS ONE 2017, 12, e0173966. [Google Scholar] [CrossRef]
- Uwakwe, U.; Mahajan, S.M. V2G parking lot with PV rooftop for capacity enhancement of a distribution system. IEEE Trans. Sustain. Energy 2014, 5, 119–127. [Google Scholar] [CrossRef]
- Evangelos, K.; Hatziargyriou, N.D. Distributed coordination of electric vehicles providing V2G services. IEEE Trans. Power Syst. 2016, 31, 329–338. [Google Scholar] [CrossRef]
- Guo, D.; Zhou, C. Potential performance analysis and future trend prediction of electric vehicle with V2G/V2H/V2B capability. AIMS Energy 2016, 4, 331–346. [Google Scholar] [CrossRef]
- Hassan, H.F. Novel wind powered electric vehicle charging station with vehicle-to-grid (V2G) connection capability. Energy Convers. Manag. 2017, 136, 229–239. [Google Scholar] [CrossRef]
- Preetham, P.G.; Shireen, W. PV powered smart charging station for PHEVs. Renew. Energy 2014, 66, 280–287. [Google Scholar] [CrossRef]
- Clara, M.M.; Hu, X.; Cao, D.; Velenis, E.; Gao, B.; Wellers, M. Energy management in plug-in hybrid electric vehicles: Recent progress and a connected vehicles perspective. IEEE Trans. Veh. Technol. 2017, 66, 4534–4549. [Google Scholar] [CrossRef]
- Morteza, M.G.; Mahmoodi, M. Optimized predictive energy management of plug-in hybrid electric vehicle based on traffic condition. J. Clean. Prod. 2016, 139, 935–948. [Google Scholar] [CrossRef]
- Pinak, T.; Marano, V.; Rizzoni, G. Energy management for plug-in hybrid electric vehicles using equivalent consumption minimization strategy. Int. J. Electr. Hybrid Veh. 2010, 2, 329–350. [Google Scholar]
- Chao, C.; Moura, S.J.; Hu, X.; Hedrick, K.; Sun, F. Dynamic traffic feedback data enabled energy management in plug-in hybrid electric vehicles. IEEE Trans. Control Syst. Technol. 2015, 23, 1075–1086. [Google Scholar] [CrossRef]
- Zheng, C.; Mi, C.C.; Xu, J.; Gong, X.; You, C. Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks. IEEE Trans. Veh. Technol. 2014, 63, 1567–1580. [Google Scholar] [CrossRef]
- Qi, X.; Wu, G.; Boriboonsomsin, K.; Barth, M. Development and evaluation of an evolutionary algorithm-based online energy management system for plug-in hybrid electric vehicles. IEEE Trans. Intell. Transp. 2017, 18, 2181–2191. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Park, J.; Chen, Z.; Kuang, M.; Masrur, A.; Phillips, A. Intelligent hybrid vehicle power control—Part I: Machine learning of optimal vehicle power. IEEE Trans. Veh. Technol. 2012, 61, 3519–3530. [Google Scholar] [CrossRef]
- Murphey, Y.L.; Park, J.; Kiliaris, L.; Kuang, M.; Masrur, A.; Phillips, A.; Wang, Q. Intelligent hybrid vehicle power control—Part II: Online intelligent energy management. Trans. Veh. Technol. 2013, 62, 69–79. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, D.; Jia, H.; Djilali, N.; Zhang, W. Aggregation and bidirectional charging power control of plug-in hybrid electric vehicles: Generation system adequacy analysis. IEEE Trans. Sustain. Energy 2015, 6, 325–335. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P. Review of the impact of vehicle-to-grid technologies on distribution systems and utility interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Singh, M.; Thirugnanam, K.; Kumar, P.; Kar, I. Real-time coordination of electric vehicles to support the grid at the distribution substation level. IEEE Syst. J. 2015, 9, 1000–1010. [Google Scholar] [CrossRef]
- Haddadian, G.; Khalili, N.; Khodayar, M.; Shahidehpour, M. Optimal scheduling of distributed battery storage for enhancing the security and the economics of electric power systems with emission constraints. Electr. Power Syst. Res. 2015, 124, 152–159. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-grid control for supplementary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2015, 30, 3110–3119. [Google Scholar] [CrossRef]
- Abdollah, K.F.; Rostami, M.A.; Niknam, T. Reliability-oriented reconfiguration of vehicle-to-grid networks. IEEE Trans. Ind. Electron. 2015, 11, 682–691. [Google Scholar] [CrossRef]
- Kristien, C.N.; Haesen, E.; Driesen, J. The impact of charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef] [Green Version]
- Hoang, N.; Zhang, C.; Mahmud, M.A. Optimal coordination of G2V and V2G to support power grids with high penetration of renewable energy. IEEE Trans. Transp. Electrification 2015, 1, 188–195. [Google Scholar] [CrossRef]
- Li, S.; Bao, K.; Fu, X.; Zheng, H. Energy management and control of electric vehicle charging stations. Electr. Power Compon. Syst. 2014, 42, 339–347. [Google Scholar] [CrossRef]
- Omid, R.; Vafaeipour, M.; Omar, N.; Rosen, M.; Hegazy, O.; Timmermans, J.M.; Heibati, M.; Van Den Bossche, P. An optimal versatile control approach for plug-in electric vehicles to integrate renewable energy sources and smart grids. Energy 2017, 134. [Google Scholar] [CrossRef]
- Bunyamin, Y.; Uzunoglu, M. A double-layer smart charging strategy of electric vehicles taking routing and charge scheduling into account. Appl. Energy 2016, 167, 407–419. [Google Scholar] [CrossRef]
- Laiq, K.; Qamar, S. Online Adaptive Neuro-Fuzzy Based Full Car Suspension Control Strategy. In Handbook of Research on Novel Soft Computing Intelligent Algorithms: Theory and Practical Applications, 2nd ed.; Vasant, P., Ed.; IGI Global: Hershey, PA, USA, 2014; pp. 617–666. ISBN 9781466644502. [Google Scholar]
- Thomas, B.; De Blasio, R. IEEE 1547 series of standards: Interconnection issues. IEEE Trans Power Electron. 2004, 19, 1159–1162. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 | t9 | t10 | t11 | t12 | t13 | t14 | t15 | t16 | t17 | t18 | t19 | t20 | t21 | t22 | t23 | t24 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| BSS | −50 | −50 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | −20 | 0 | +20 | +20 | 0 | 0 | 0 | +30 | +30 | +30 | +30 | 0 | 0 | 0 |
| PHEV-1 | 0 | −30 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | +20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| PHEV-2 | 0 | +30 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| PHEV-3 | 0 | 0 | 0 | −50 | 0 | 0 | 0 | 0 | 0 | +20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| PHEV-4 | 0 | 0 | 0 | −20 | 0 | 0 | 0 | 0 | 0 | 0 | +20 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| PHEV-5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | −20 | −20 | 0 | +10 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mumtaz, S.; Ali, S.; Ahmad, S.; Khan, L.; Hassan, S.Z.; Kamal, T. Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies 2017, 10, 1923. https://doi.org/10.3390/en10111923
Mumtaz S, Ali S, Ahmad S, Khan L, Hassan SZ, Kamal T. Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies. 2017; 10(11):1923. https://doi.org/10.3390/en10111923
Chicago/Turabian StyleMumtaz, Sidra, Saima Ali, Saghir Ahmad, Laiq Khan, Syed Zulqadar Hassan, and Tariq Kamal. 2017. "Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System" Energies 10, no. 11: 1923. https://doi.org/10.3390/en10111923
APA StyleMumtaz, S., Ali, S., Ahmad, S., Khan, L., Hassan, S. Z., & Kamal, T. (2017). Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies, 10(11), 1923. https://doi.org/10.3390/en10111923