Near State Vector Selection-Based Model Predictive Control with Common Mode Voltage Mitigation for a Three-Phase Four-Leg Inverter




Abstract
:1. Introduction
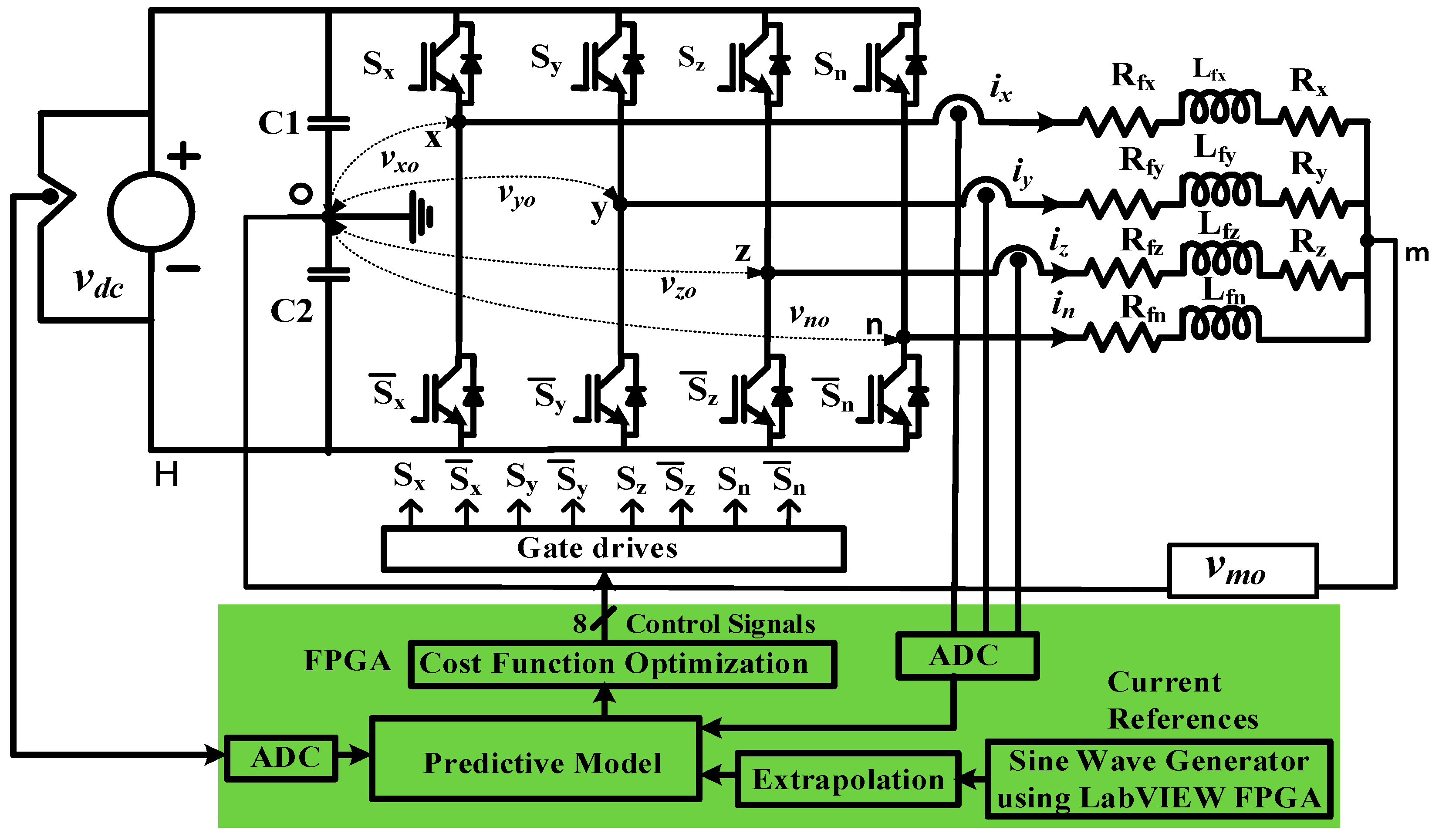
2. Three-Phase Four-Leg Inverter Model
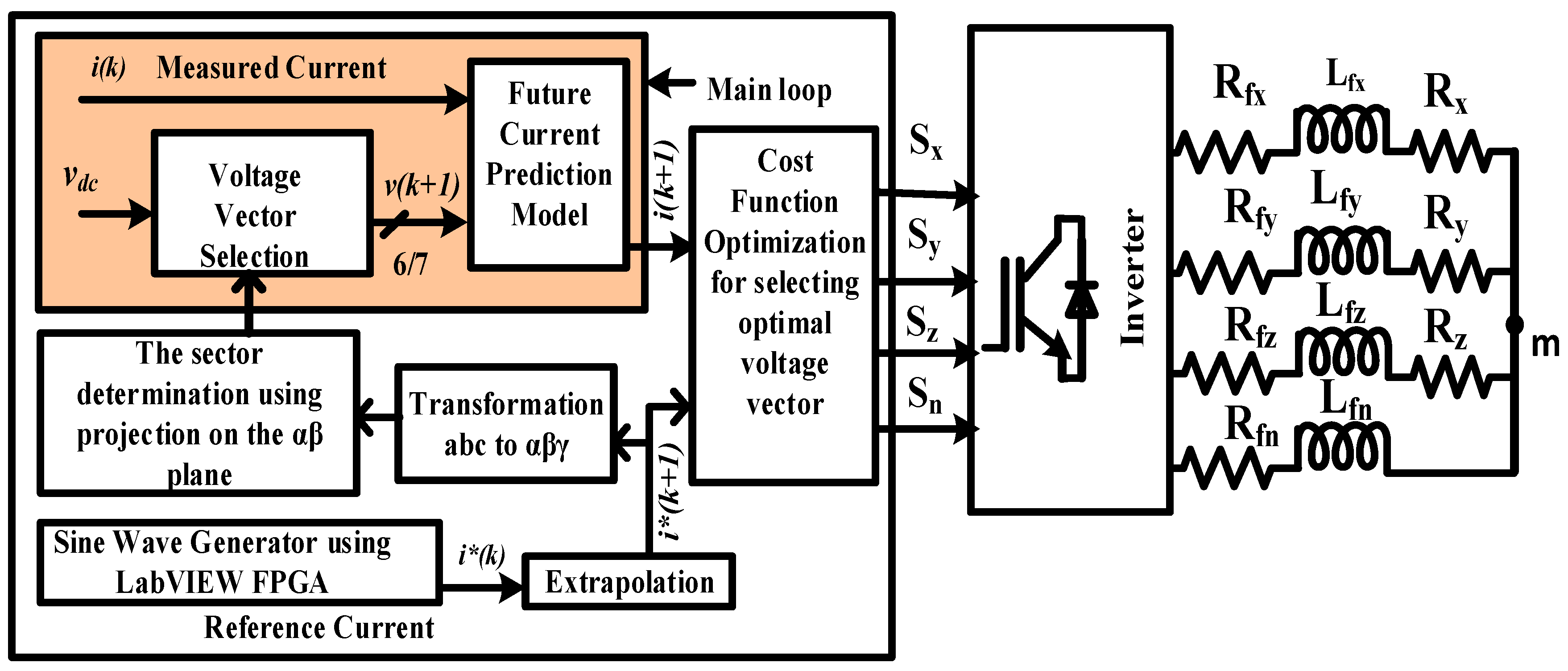
3. Model Predictive Control Method of Three-Phase Four-Leg Inverter
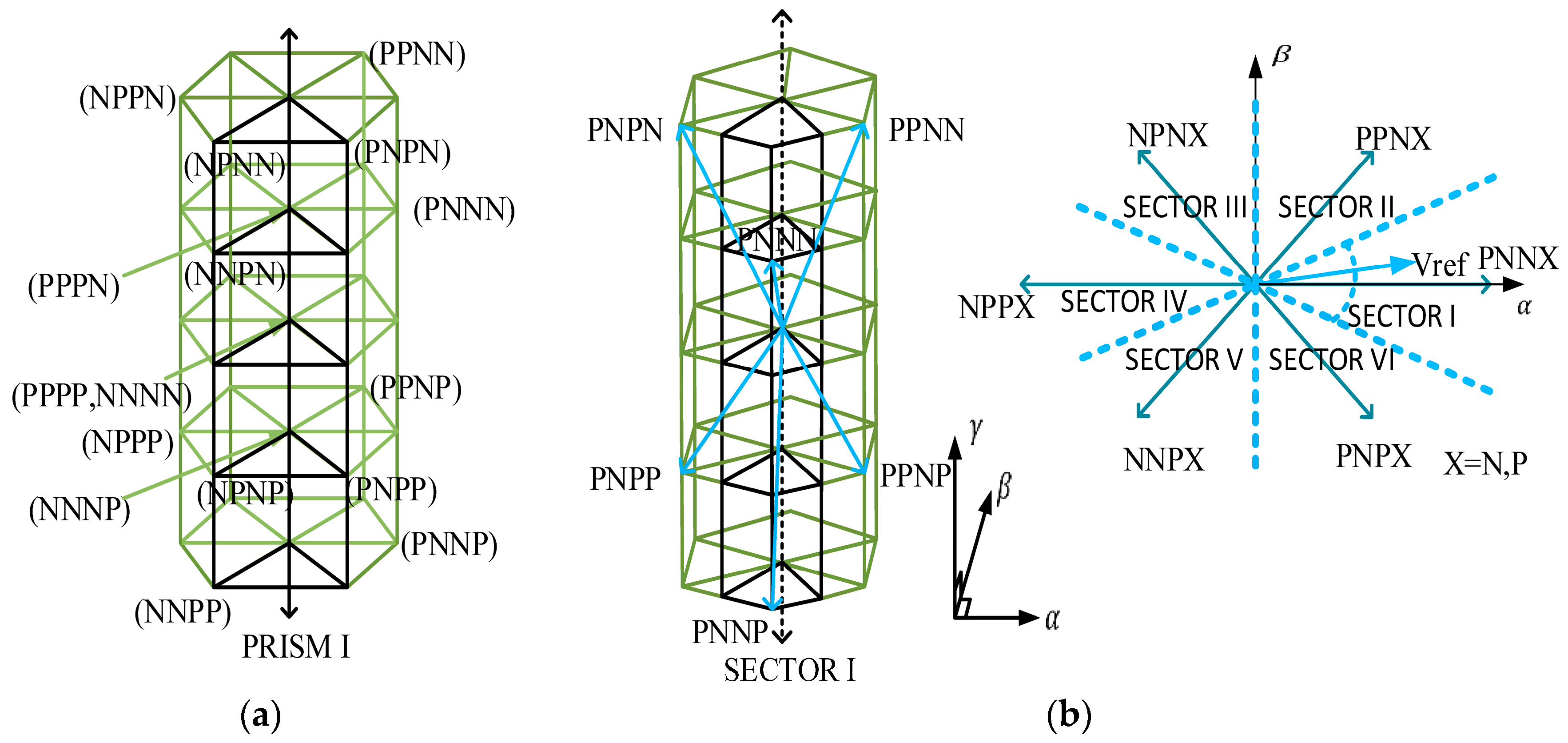
4. Near State Vector Selection-Based Model Predictive Control
- Step 1.
- Measure the load currents i(k) and calculate the reference currents i*(k + 1) by using Equation (13)
- Step 2.
- Identify the sector on the αβ plane in the αβγ coordinate and the corresponding voltage vectors at every sampling period.
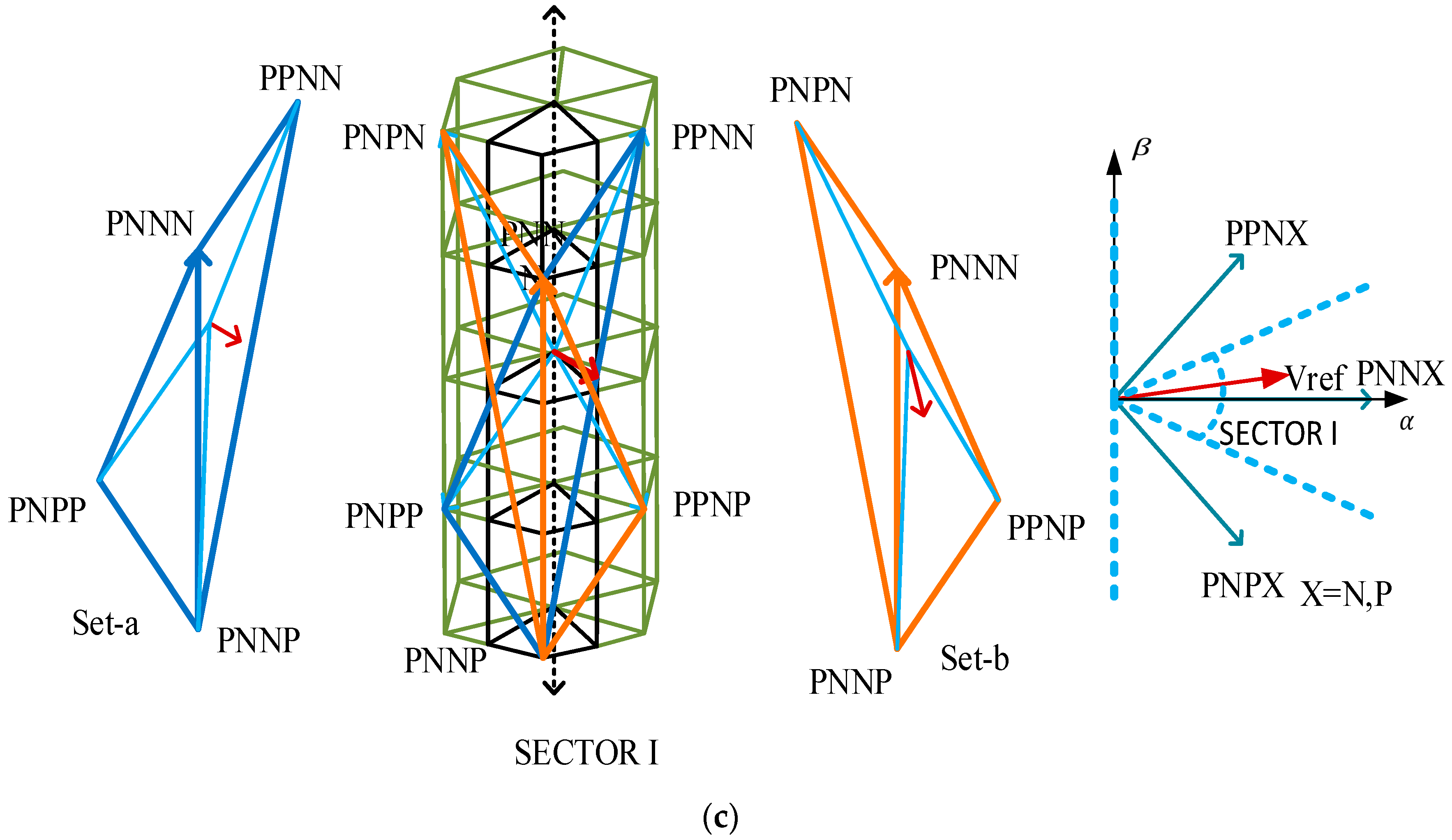
- Step 3.
- Predict the future voltage vector for all of the possible switching states from the identified sector from Table 3.
- Step 4.
- Predict the load currents i(k + 1) of all of the possible switching states from the identified sector at the next sampling time by using Equation (11).
- Step 5.
- Evaluate the cost function g(k + 1) by using Equation (16).
- Step 6.
- 7Select the switching state that optimizes the cost function.
- Step 7.
- 7Apply the selected switching action to fire the inverter switches.
5. Simulation and Experimental Results
5.1. Experimental Setup
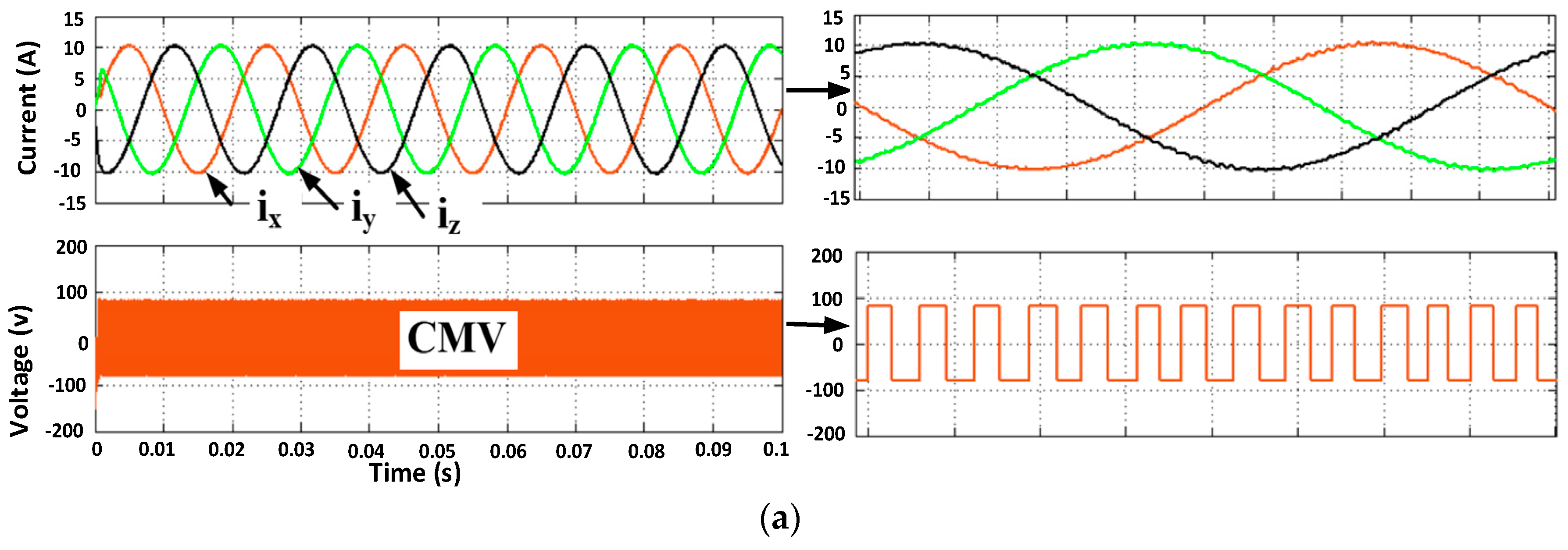
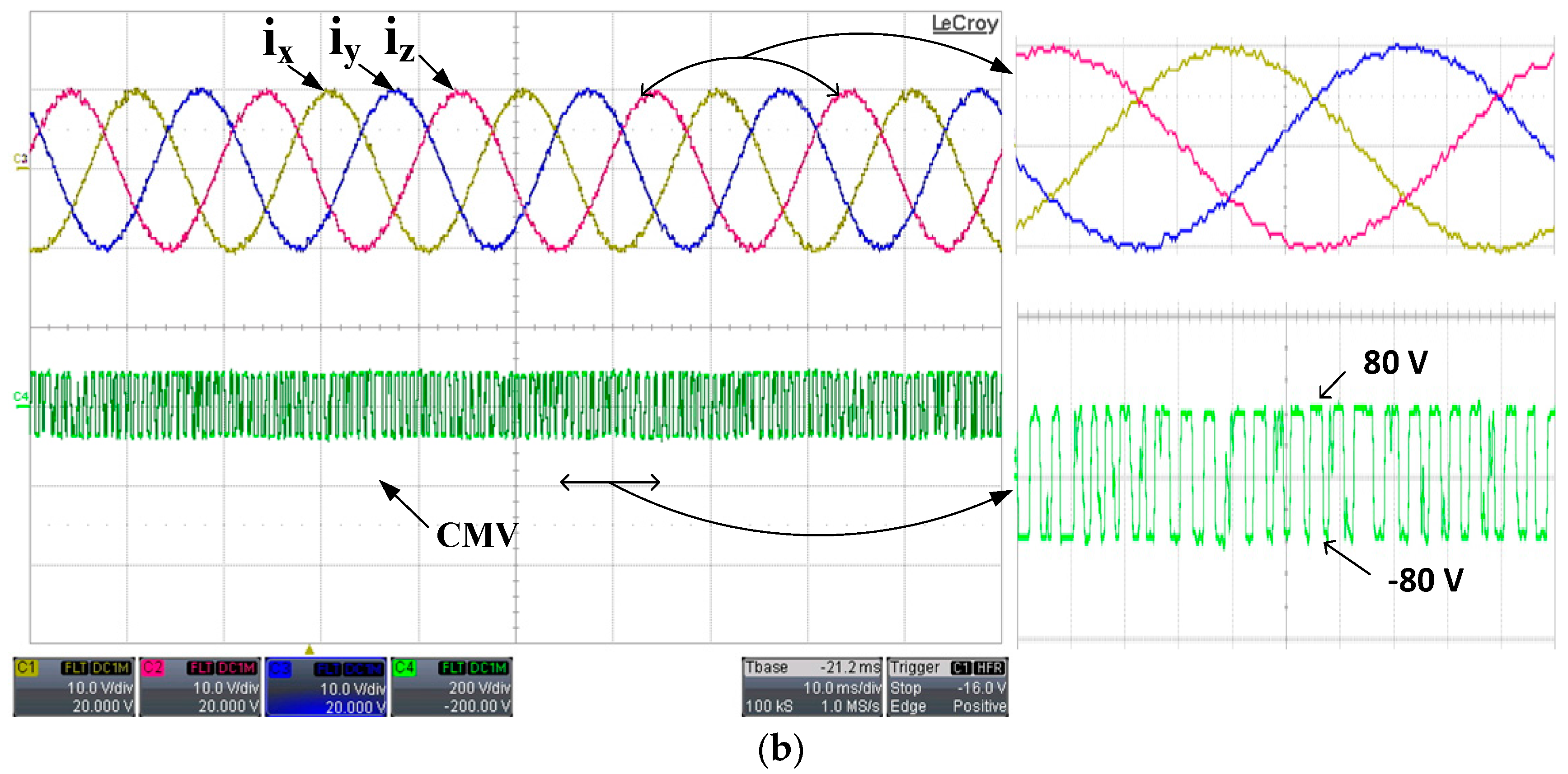
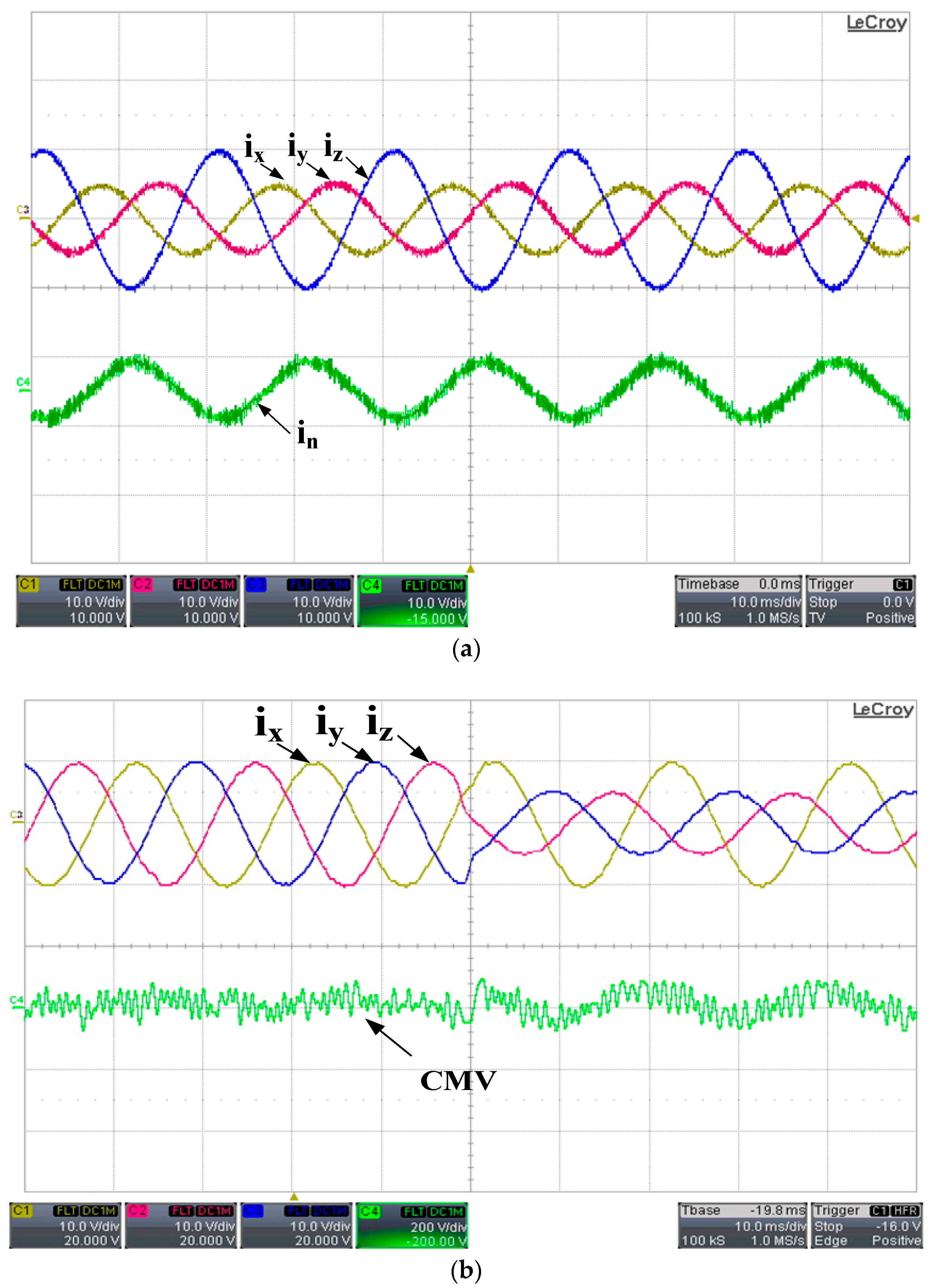
5.2. Results and Performance Analysis
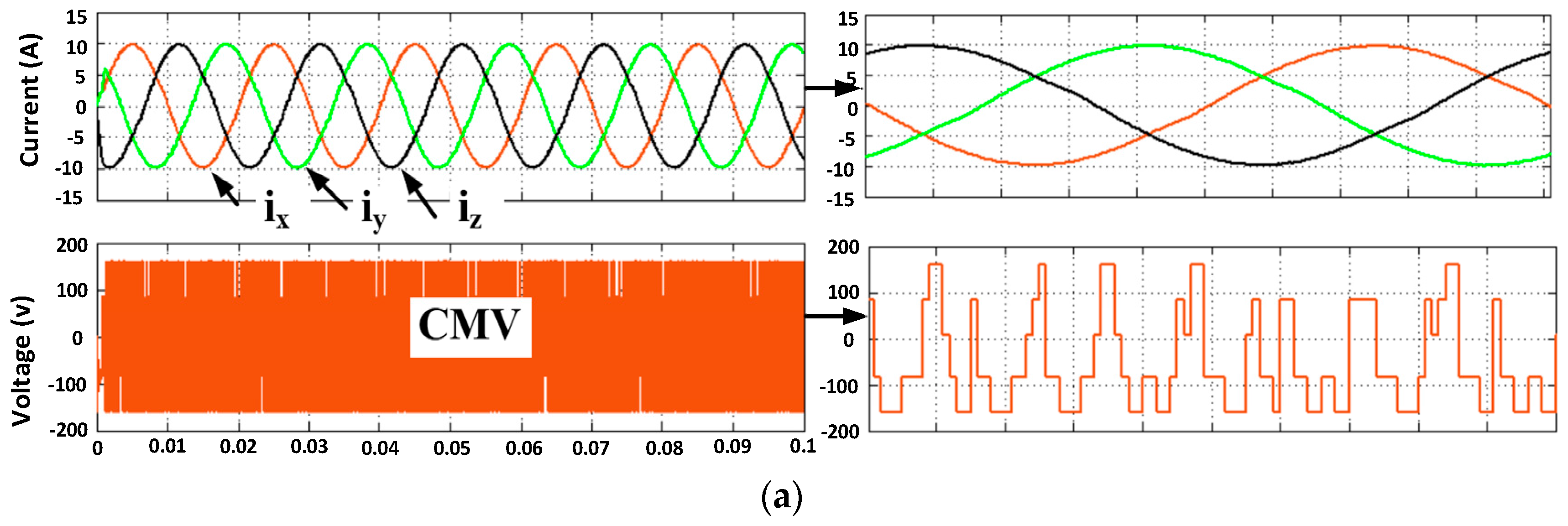
- Case 1.
- All available voltage vectors in conventional MPC at every sampling time.
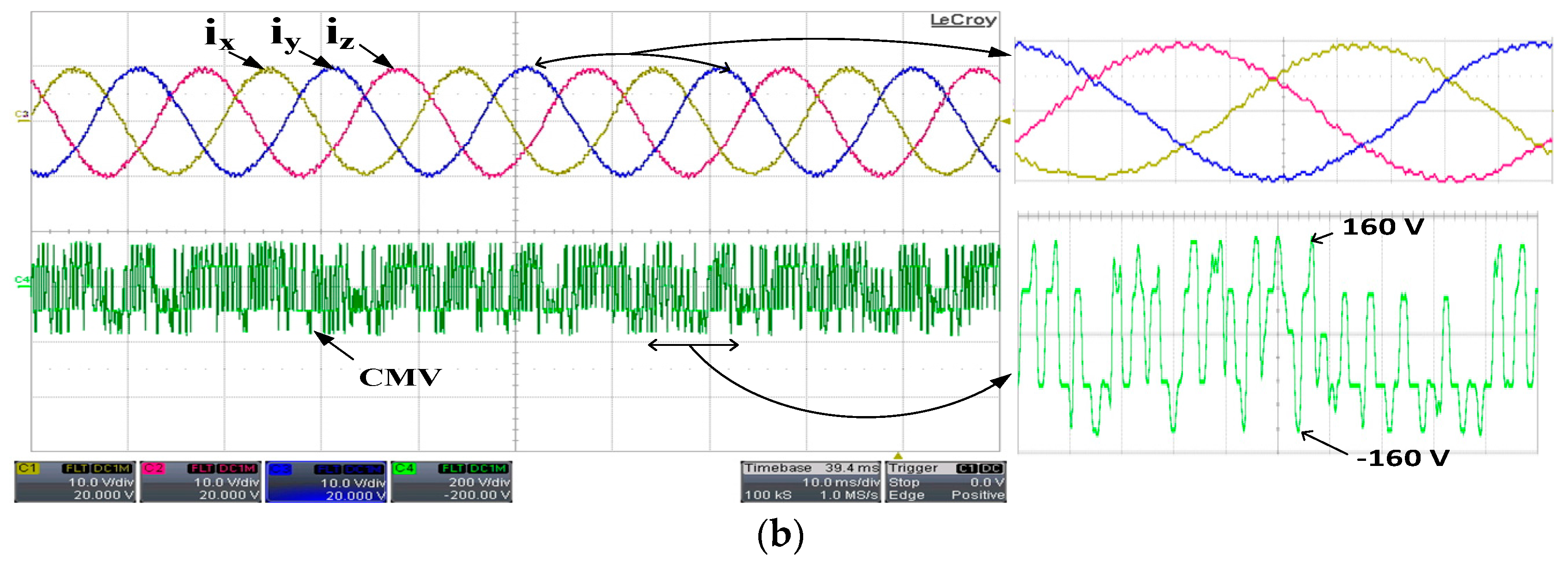
- Case 2.
- One zero vector—either PPPP or NNNN—with six active vectors in proposed NSV-MPC at every sampling time.
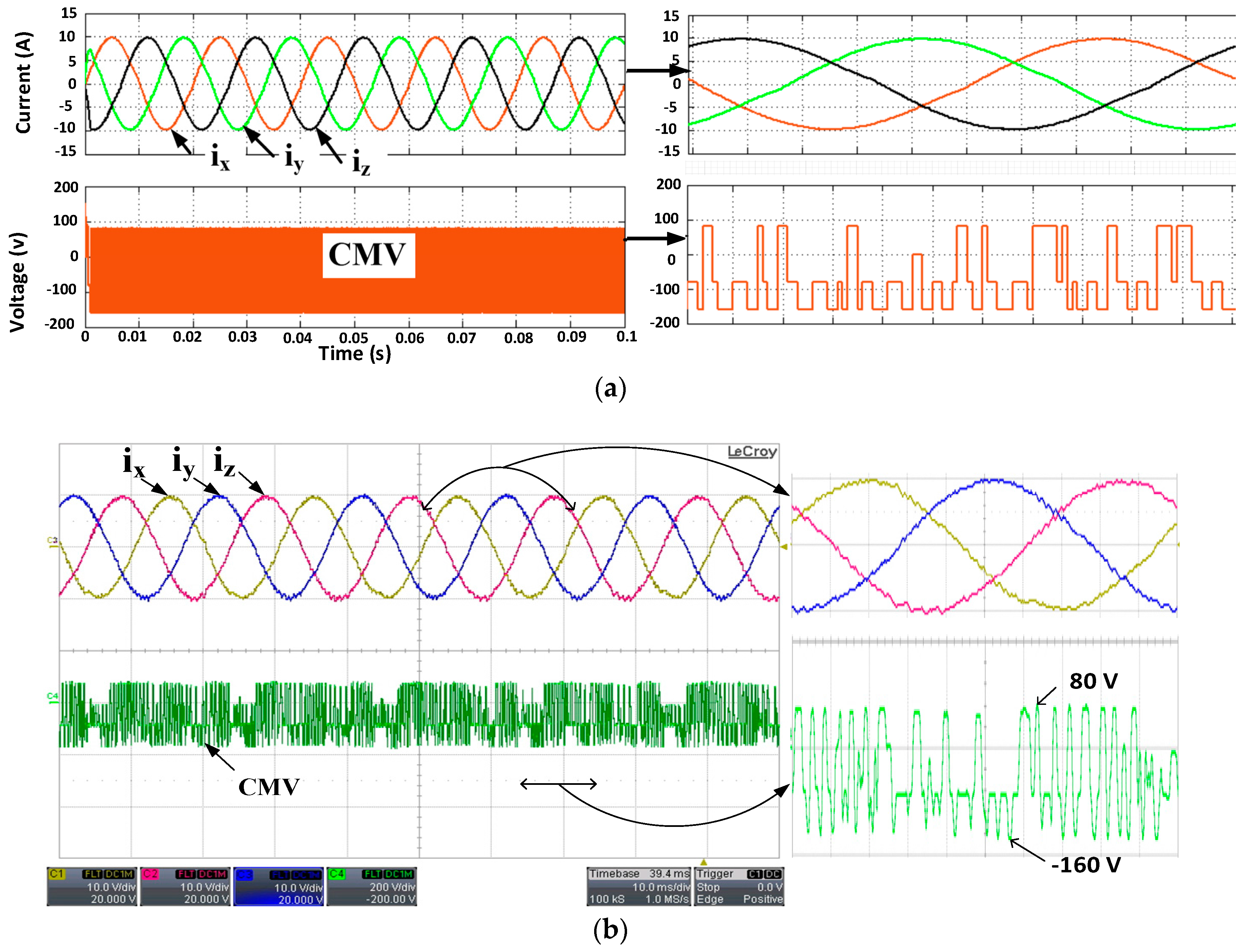
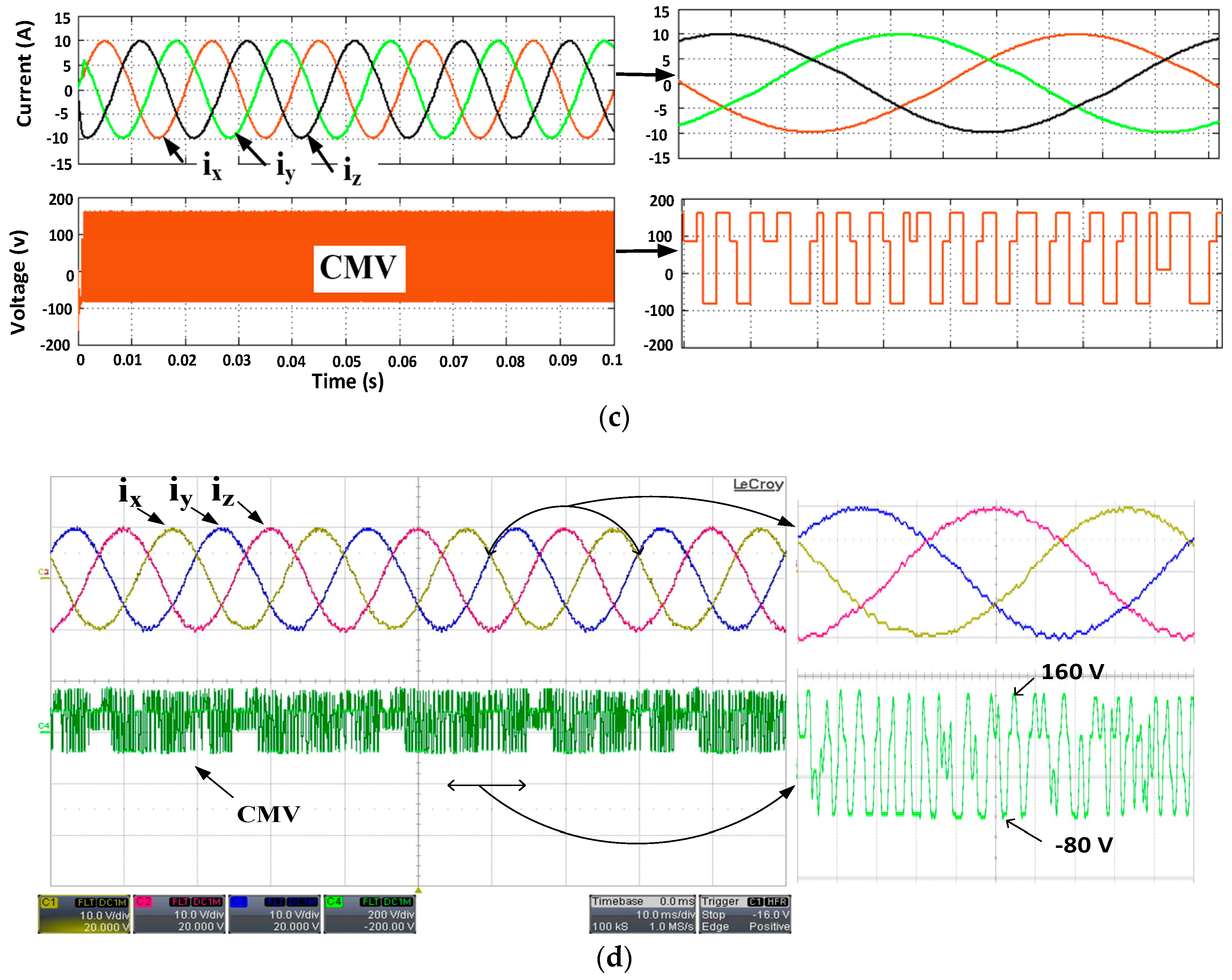
- Case 3.
- Six active vectors in proposed NSV-MPC at every sampling time.
6. Robustness Analysis and Performance Evaluation
6.1. Robustness Analysis of Model Parameter Variations
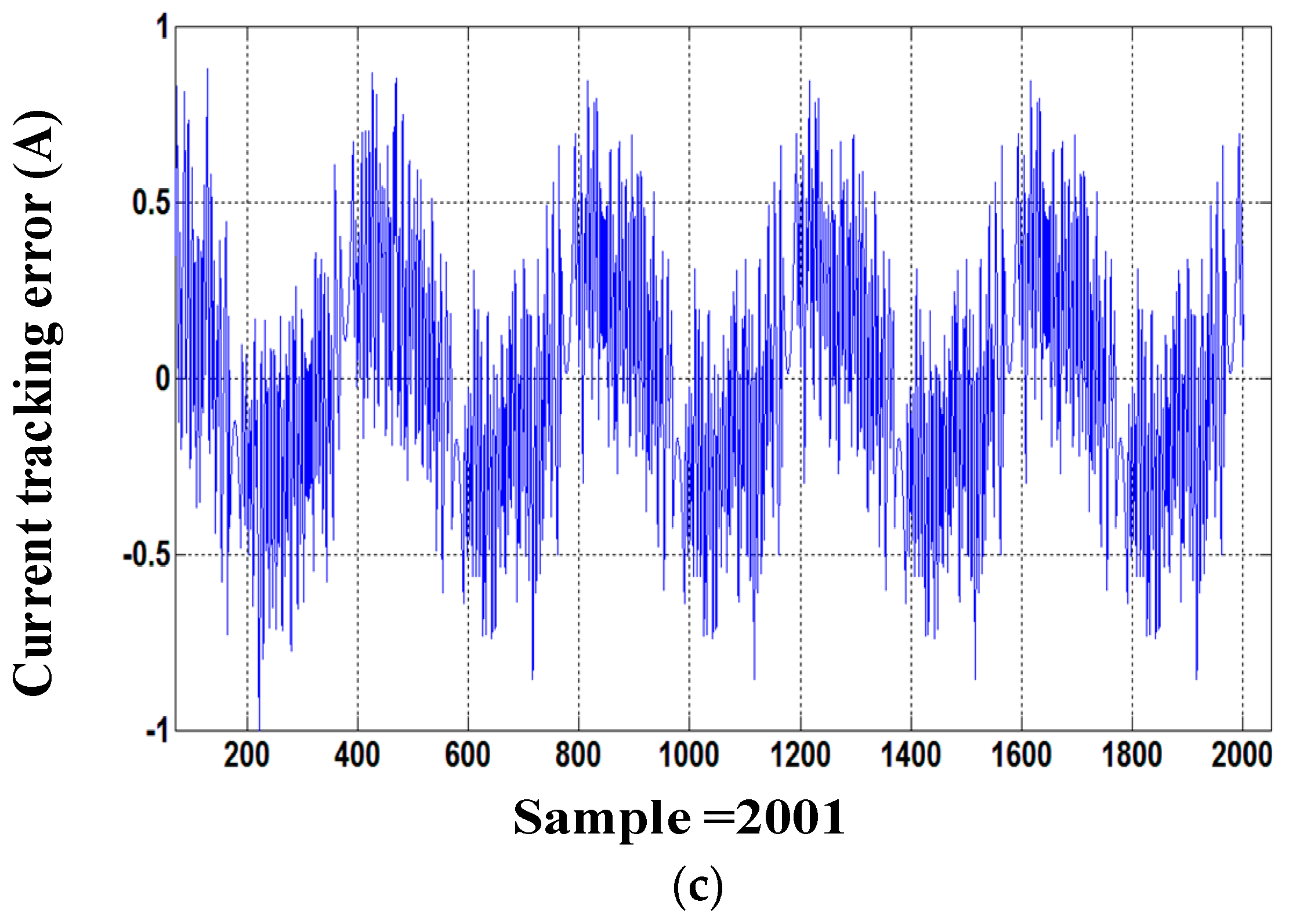
6.2. Reference Current Tracking Error
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Philip, J.; Jain, C.; Kant, K.; Singh, B.; Mishra, S.; Chandra, A.; Al-Haddad, K. Control and Implementation of a Standalone Solar Photovoltaic Hybrid System. IEEE Trans. Ind. Appl. 2016, 52, 3472–3479. [Google Scholar] [CrossRef]
- Pichan, M.; Rastegar, H. Sliding Mode Control of Four-Leg Inverter with Fixed Switching Frequency for Uninterruptible Power Supply Applications. IEEE Trans. Ind. Electron. 2017, 64, 6805–6814. [Google Scholar] [CrossRef]
- Rodriguez, C.T.; Fuente, D.V.D.L.; Garcera, G.; Figueres, E.; Moreno, J.A.G. Reconfigurable Control Scheme for a PV Microinverter Working in Both Grid-Connected and Island Modes. IEEE Trans. Ind. Electron. 2013, 60, 1582–1595. [Google Scholar] [CrossRef]
- Singh, B.; Sharma, S. Design and Implementation of Four-Leg Voltage-Source-Converter-Based VFC for Autonomous Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2012, 59, 4694–4703. [Google Scholar] [CrossRef]
- Liang, J.; Green, T.C.; Feng, C.; Weiss, G. Increasing Voltage Utilization in Split-Link, Four-Wire Inverters. IEEE Trans. Power Electron. 2009, 24, 1562–1569. [Google Scholar] [CrossRef]
- Karanki, S.B.; Geddada, N.; Mishra, M.K.; Kumar, B.K. A Modified Three-Phase Four-Wire UPQC Topology With Reduced DC-Link Voltage Rating. IEEE Trans. Ind. Electron. 2013, 60, 3555–3566. [Google Scholar] [CrossRef]
- Kim, J.-H.; Sul, S.-K. A carrier-based PWM method for three-phase four-leg voltage source converters. IEEE Trans. Power Electron. 2004, 19, 66–75. [Google Scholar] [CrossRef]
- Yaramasu, V.; Rivera, M.; Narimani, M.; Bin, W.; Rodriguez, J. Model Predictive Approach for a Simple and Effective Load Voltage Control of Four-Leg Inverter With an Output Filter. IEEE Trans. Ind. Electron. 2014, 61, 5259–5270. [Google Scholar] [CrossRef]
- Rivera, M.; Yaramasu, V.; Rodriguez, J.; Bin, W. Model Predictive Current Control of Two-Level Four-Leg Inverters Part II: Experimental Implementation and Validation. IEEE Trans. Power Electron. 2013, 28, 3469–3478. [Google Scholar] [CrossRef]
- Brando, G.; Dannier, A.; Del Pizzo, A.; Di Noia, L.P.; Spina, I. Quick and high performance direct power control for multilevel voltage source rectifiers. Electr. Power Syst. Res. 2015, 121, 152–169. [Google Scholar] [CrossRef]
- Salem, A.; Abdallh, A.; Rasilo, P.; Belie, F.D.; Ibrahim, M.N.; Dupré, L.; Melkebeek, J. The Effect of Common-Mode Voltage Elimination on the Iron Loss in Machine Core Laminations of Multilevel Drives. IEEE Trans. Mag. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Hedayati, M.H.; Acharya, A.B.; John, V. Common-Mode Filter Design for PWM Rectifier-Based Motor Drives. IEEE Trans. Power Electron. 2013, 28, 5364–5371. [Google Scholar] [CrossRef]
- Guo, X.; He, R.; Jian, J.; Lu, Z.; Sun, X.; Guerrero, J.M. Leakage Current Elimination of Four-Leg Inverter for Transformerless Three-Phase PV Systems. IEEE Trans. Power Electron. 2016, 31, 1841–1846. [Google Scholar] [CrossRef]
- Un, E.; Hava, A.M. A Near-State PWM Method With Reduced Switching Losses and Reduced Common-Mode Voltage for Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Appl. 2009, 45, 782–793. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Li, J. Modeling, Analysis, and Mitigation of Load Neutral Point Voltage for Three-Phase Four-Leg Inverter. IEEE Trans. Ind. Electron. 2013, 60, 2010–2021. [Google Scholar] [CrossRef]
- Bakeer, A.; Ismeil, M.; Orabi, M. A Powerful Finite Control Set-Model Predictive Control Algorithm for quasi Z-Source Inverter. IEEE Trans. Ind. Inform. 2016, 12, 1371–1379. [Google Scholar] [CrossRef]
- Geyer, T.; Quevedo, D.E. Multistep Finite Control Set Model Predictive Control for Power Electronics. IEEE Trans. Power Electron. 2014, 29, 6836–6846. [Google Scholar] [CrossRef]
- Chen, Q.; Luo, X.; Zhang, L.; Quan, S. Model Predictive Control for Three-Phase Four-Leg Grid-Tied Inverters. IEEE Access 2017, 5, 2834–2841. [Google Scholar] [CrossRef]
- Dadu, A.; Tey, K.S.; Mekhilef, S.; Nakaoka, M. Lyapunov law based model predictive control scheme for grid connected three phase three level neutral point clamped inverter. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia, Kaohsiung, Taiwan, 3–7 June 2017. [Google Scholar]
- Yaramasu, V.; Rivera, M.; Bin, W.; Rodriguez, J. Model Predictive Current Control of Two-Level Four-Leg Inverter Part I: Concept, Algorithm, and Simulation Analysis. IEEE Trans. Power Electron. 2013, 28, 3459–3468. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, T.H.; Hsiao, C.F.; Lin, C.K. Implementation of adaptive inverse controller for an interior permanent magnet synchronous motor adjustable speed drive system based on predictive current control. IET Electr. Power Appl. 2015, 9, 60–70. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H.; Xia, B. Model predictive torque control of induction motor drives with reduced torque ripple. IET Electr. Power Appl. 2015, 9, 595–604. [Google Scholar] [CrossRef]
- Geyer, T.; Quevedo, D.E. Performance of Multistep Finite Control Set Model Predictive Control for Power Electronics. IEEE Trans. Power Electron. 2015, 30, 1633–1644. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the Art of Finite Control Set Model Predictive Control in Power Electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Uddin, M.; Mekhilef, S.; Rivera, M. Experimental validation of minimum cost function-based model predictive converter control with efficient reference tracking. IET Power Electron. 2015, 8, 278–287. [Google Scholar] [CrossRef]
- Rivera, M.; Yaramasu, V.; Llor, A.; Rodriguez, J.; Wu, B.; Fadel, M. Digital Predictive Current Control of a Three-Phase Four-Leg Inverter. IEEE Trans. Ind. Electron. 2013, 60, 4903–4912. [Google Scholar] [CrossRef]
- Akter, M.P.; Mekhilef, S.; Tan, N.M.L.; Akagi, H. Modified Model Predictive Control of a Bidirectional AC-DC Converter Based on Lyapunov Function for Energy Storage Systems. IEEE Trans. Ind. Electron. 2016, 63, 704–715. [Google Scholar] [CrossRef]
- Hoseini, S.K.; Adabi, J.; Sheikholeslami, A. Predictive modulation schemes to reduce common-mode voltage in three-phase inverters-fed AC drive systems. IET Power Electron. 2014, 7, 840–849. [Google Scholar] [CrossRef]
- Kwak, S.; Mun, S.K. Model Predictive Control Methods to Reduce Common-Mode Voltage for Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2015, 30, 5019–5035. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model Predictive Control: A Review of Its Applications in Power Electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Zhang, X.; Yang, S.; Xie, Z.; Cao, R. A Model Predictive Control Based Common-Mode Voltage Suppression Strategy for Voltage Source Inverter. IEEE Trans. Ind. Electron. 2016, 63, 6115–6125. [Google Scholar] [CrossRef]
- Chen, X.; Chen, W.; Han, Y.; Sha, Y.; Qi, H.; Yang, X. Predictive current control method to reduce common-mode interference for three-phase induction motor. In Proceedings of the IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–25 May 2016; pp. 2859–2862. [Google Scholar]
- Pettersson, S.; Salo, M.; Tuusa, H. Improving the performance of a three-leg four-wire active power filter with a neutral wire filter inductor. In Proceedings of the IEEE Compatibility in Power Electronics, Gdynia, Poland, 1 June 2005; pp. 101–107. [Google Scholar]
- Bayhan, S.; Abu-Rub, H.; Balog, R. Model Predictive Control of Quasi-Z Source Four-Leg Inverter. IEEE Trans. Ind. Electron. 2016, 63, 4506–4516. [Google Scholar] [CrossRef]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.C. Three-dimensional space vector modulation for four-leg voltage-source converters. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Yaramasu, V.; Bin, W.; Rivera, M.; Narimani, M.; Kouro, S.; Rodriguez, J. Generalised approach for predictive control with common-mode voltage mitigation in multilevel diode-clamped converters. IET Power Electron. 2015, 8, 1440–1450. [Google Scholar] [CrossRef]
- Cortes, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in Model Predictive Control of power converters and drives. In Proceedings of the IEEE International Conference Industrial Technology, Gippsland, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]
- Jose, R.; Patricio, C. Cost Function Selection, Predictive Control of Power Converters and Electrical Drives; Wiley: Hoboken, NJ, USA, 2012; pp. 145–161. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Switching States | Phase Voltage in abc Coordinate | Switching States | Phase Voltage in abc Coordinate | ||||
|---|---|---|---|---|---|---|---|
| PPPP | 0 | 0 | 0 | PPPN | |||
| NNNP | − | − | − | NNNN | 0 | 0 | 0 |
| PNNP | − | − | PNNN | 0 | |||
| PPNP | − | PPNN | |||||
| NPNP | − | − | NPNN | 0 | 0 | ||
| NPPP | − | 0 | 0 | NPPN | 0 | ||
| NNPP | − | − | 0 | NNPN | 0 | ||
| PNPP | − | 0 | PNPN | 0 | |||
| Switching States | Phase Voltage in αβγ Coordinate | Switching States | Phase Voltage in αβγ Coordinate | ||||
|---|---|---|---|---|---|---|---|
| PPPP | 0 | 0 | 0 | PPPN | 0 | 0 | |
| NNNP | 0 | 0 | − | NNNN | 0 | 0 | 0 |
| PNNP | 0 | − | PNNN | 0 | |||
| PPNP | − | PPNN | |||||
| NPNP | − | − | NPNN | − | |||
| NPPP | − | 0 | − | NPPN | − | 0 | |
| NNPP | − | − | − | NNPN | − | − | |
| PNPP | − | − | PNPN | − | |||
| SECTOR I | SECTOR II | ||||||||||||
| PNPP | PNNP | PNNN | PPNN | PNPN | PPNP | PNNP | PPNP | PPNN | NPNN | PNNN | NPNP | ||
| − | − | ||||||||||||
| − | − | − | − | − | − | ||||||||
| − | − | − | − | − | − | − | − | − | − | ||||
| − | − | − | − | − | − | ||||||||
| 0 | − | 0 | 0 | 0 | 0 | − | − | 0 | |||||
| SECTOR III | SECTOR IV | ||||||||||||
| PPNP | NPNP | NPNN | NPPN | PPNN | NPPP | NPNP | NPPP | NPPN | NNPN | NPNN | NNPP | ||
| − | − | − | − | − | − | − | − | − | − | ||||
| − | − | ||||||||||||
| − | − | − | − | − | − | ||||||||
| − | − | − | − | − | − | ||||||||
| 0 | − | 0 | 0 | 0 | 0 | − | − | 0 | |||||
| SECTOR V | SECTOR VI | ||||||||||||
| NPPP | NNPP | NNPN | PNPN | NPPN | PNPP | NNPP | PNPP | PNPN | PNNN | NNPN | PNNP | ||
| − | − | − | − | − | − | ||||||||
| − | − | − | − | − | − | − | − | − | − | ||||
| − | − | − | |||||||||||
| − | − | − | − | − | − | ||||||||
| 0 | − | 0 | 0 | 0 | 0 | − | − | 0 | |||||
| Variable | Parameter | Value |
|---|---|---|
| DC-link voltage | 320 V | |
| C | DC-link capacitance | 2.2 mF |
| Filter inductance | 15 mH | |
| Sampling time | 50 µs | |
| R | Load resistance | 12 Ω |
| Filter resistance | 0.1 Ω | |
| f* | Reference nominal frequency | 50 Hz |
| i* | Reference nominal peak current | 10 A |
| Lfn | Neutral-leg inductance | 8 mH |
| Sampling frequency | kHz |
| Strategy | Conventional MPC | Execution Time (tick) | Proposed NSV-MPC | Execution Time (tick) | Improvement |
|---|---|---|---|---|---|
| (1 tick = 25 ns) | (1 tick = 25 ns) | (%) | |||
| No. of Switching Vectors | 16 | 336 | 6 | 187 | 44.34 |
| 7 | 201 | 40.17 |
| Strategy | CMV Variation | THD (%) | Current Tracking Error (%) | THD (%) | Current Tracking Error (%) | THD (%) | Current Tracking Error (%) |
|---|---|---|---|---|---|---|---|
| Sampling Frequency | Sampling Frequency | Sampling Frequency | |||||
| 50 kHz | 20 kHz | 10 kHz | |||||
| Conventional MPC | −160 to 160 | 3.47% | 3.58% | 3.90% | 4.68% | 6.65% | 6.59% |
| NSV-MPC with PPPP vector | −160 to 80 | 3.24% | 3.36% | 3.83% | 4.26% | 6.34% | 6.11% |
| NSV-MPC with NNNN vector | −80 to 160 | 3.24% | 3.36% | 3.83% | 4.26% | 6.33% | 6.13% |
| NSV-MPC with active vectors | −80 to 80 | 3.62% | 3.22% | 4.37% | 4.05% | 6.58% | 5.87% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dadu, A.M.; Mekhilef, S.; Soon, T.K.; Seyedmahmoudian, M.; Horan, B. Near State Vector Selection-Based Model Predictive Control with Common Mode Voltage Mitigation for a Three-Phase Four-Leg Inverter. Energies 2017, 10, 2129. https://doi.org/10.3390/en10122129
Dadu AM, Mekhilef S, Soon TK, Seyedmahmoudian M, Horan B. Near State Vector Selection-Based Model Predictive Control with Common Mode Voltage Mitigation for a Three-Phase Four-Leg Inverter. Energies. 2017; 10(12):2129. https://doi.org/10.3390/en10122129
Chicago/Turabian StyleDadu, Abdul Mannan, Saad Mekhilef, Tey Kok Soon, Mehdi Seyedmahmoudian, and Ben Horan. 2017. "Near State Vector Selection-Based Model Predictive Control with Common Mode Voltage Mitigation for a Three-Phase Four-Leg Inverter" Energies 10, no. 12: 2129. https://doi.org/10.3390/en10122129
APA StyleDadu, A. M., Mekhilef, S., Soon, T. K., Seyedmahmoudian, M., & Horan, B. (2017). Near State Vector Selection-Based Model Predictive Control with Common Mode Voltage Mitigation for a Three-Phase Four-Leg Inverter. Energies, 10(12), 2129. https://doi.org/10.3390/en10122129