
Power Controlling, Monitoring and Routing Center Enabled by a DC-Transformer †




Abstract
:1. Introduction
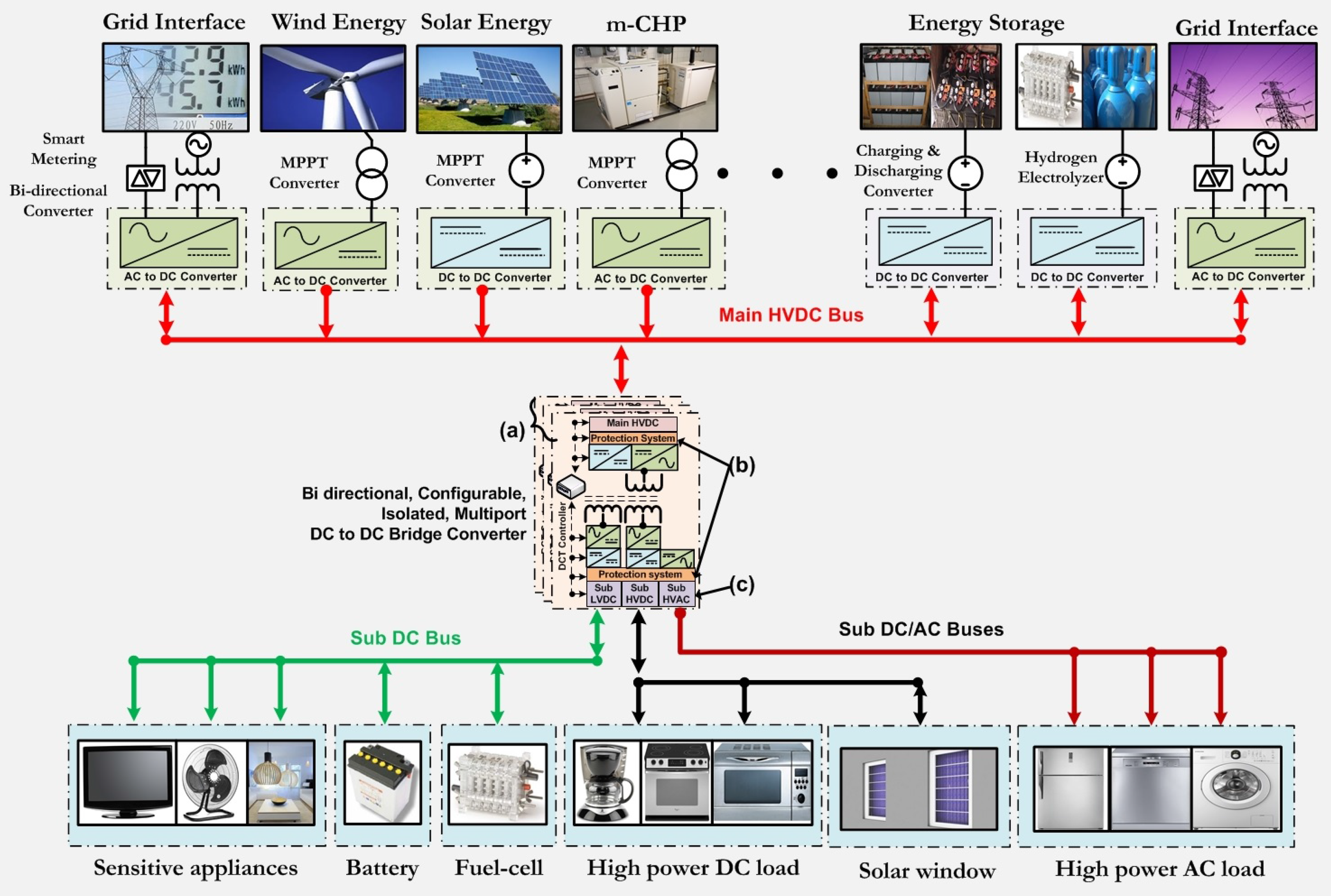
2. Description of DCT Enabled PCmRC Grid
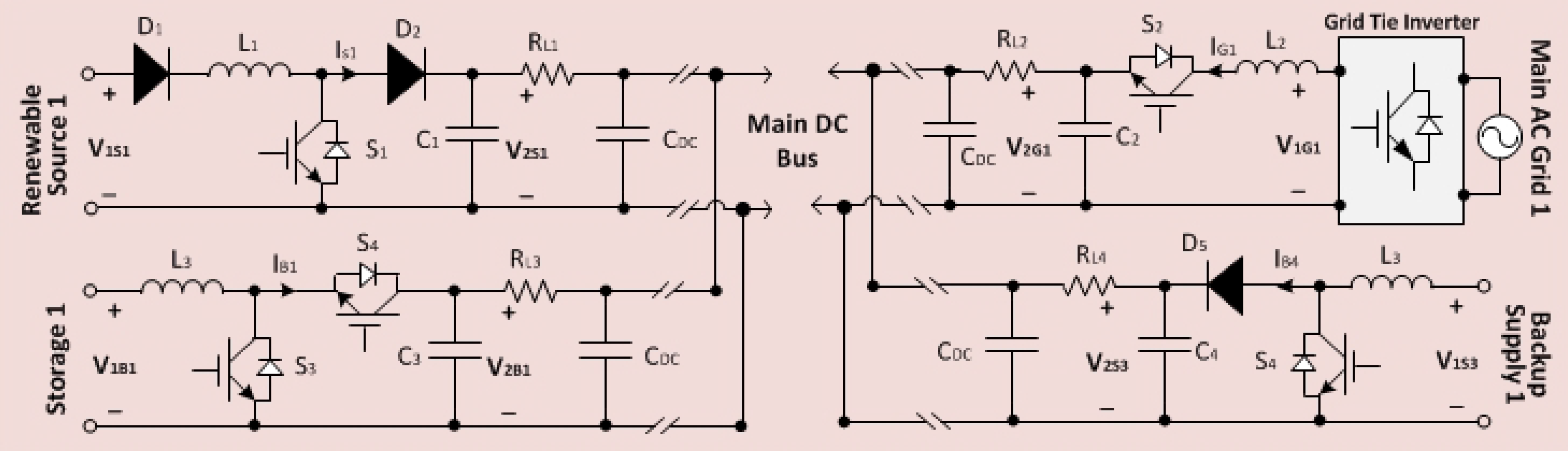
2.1. DCT Topology
2.2. Interfaces for Sustainable Sources and Storage
2.3. Load Classification and Demand Side Management
2.4. Protection and Fault Isolation
3. LVDC Consumer Grid Power Management
4. Overall Grid Control Design
4.1. DCT Control
4.2. Battery Storage Control
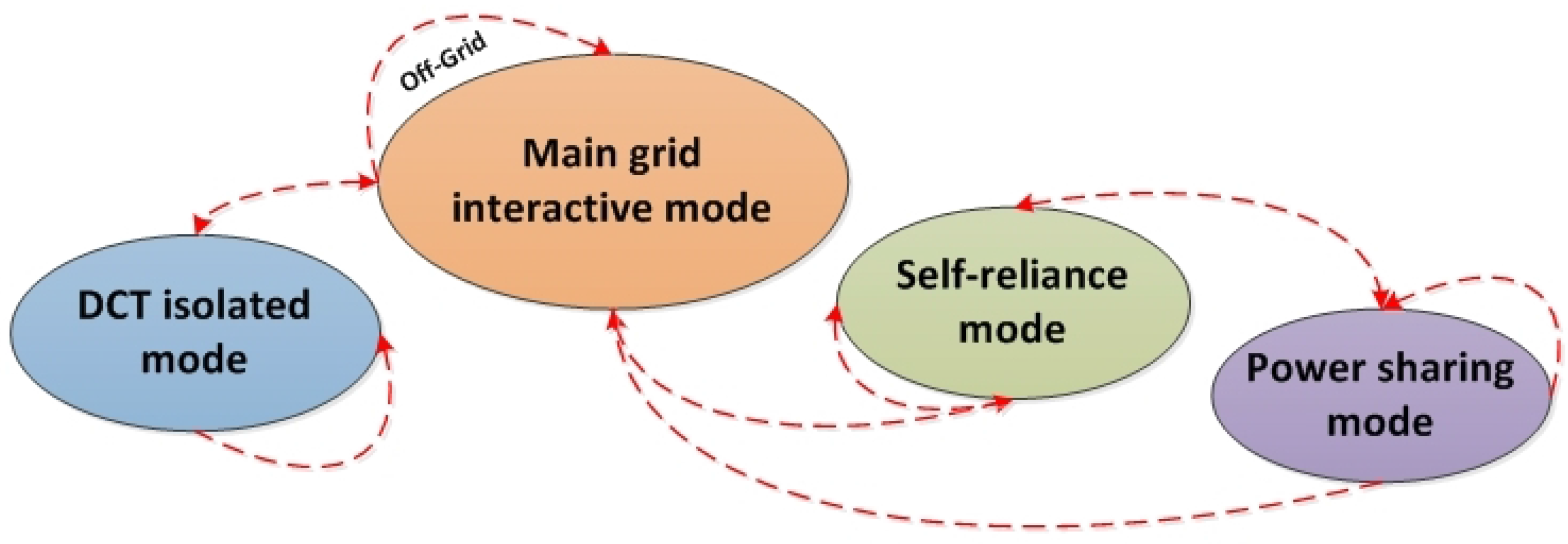
4.3. Grid Connected, Islanding and Off-Grid Control
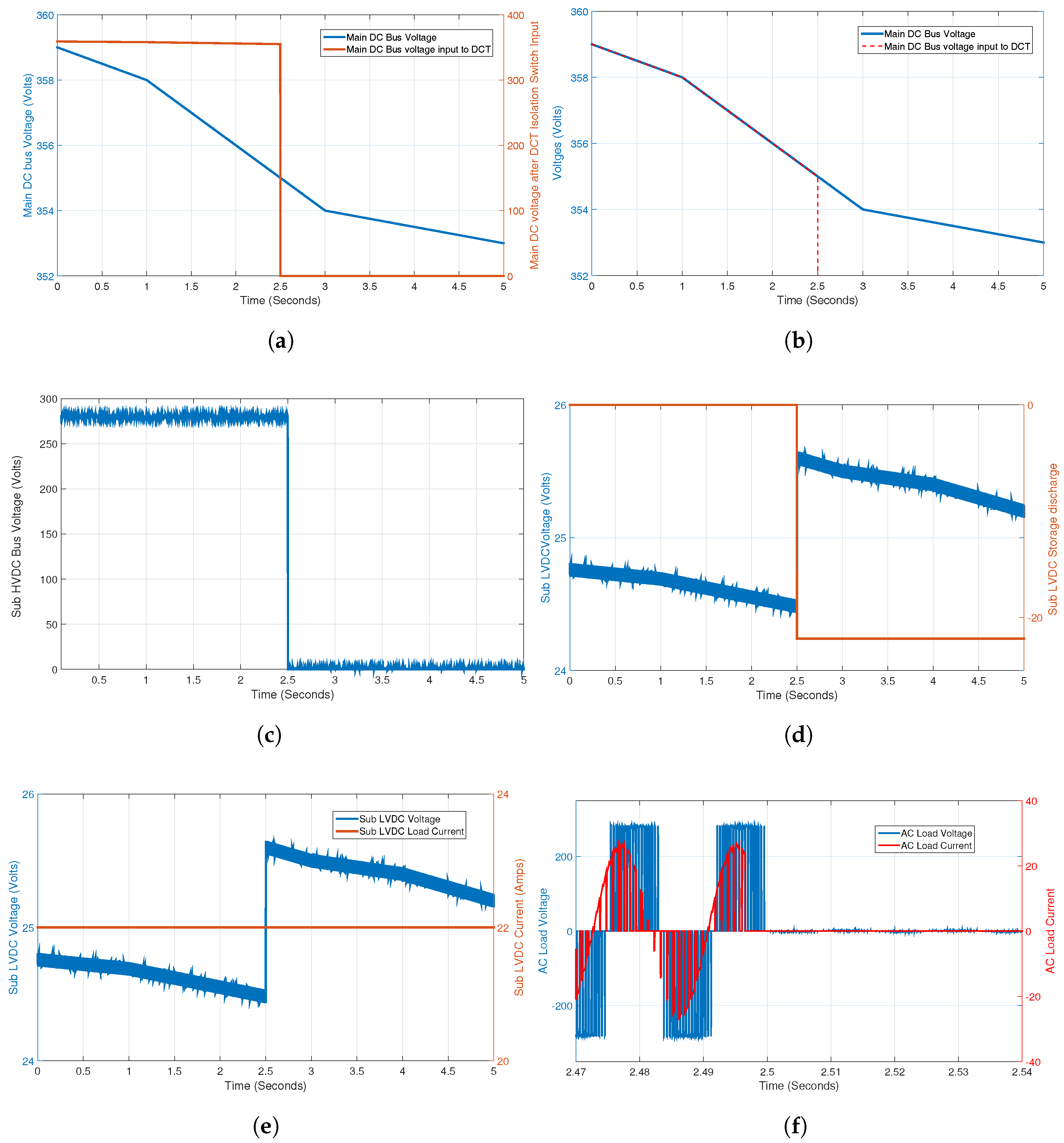
5. PCmRC System Level Case Study
5.1. Grid Connected Mode without Renewable Sources and Storage
5.2. Peak Surplus Energy Generation and On-Site Storage
5.3. Load Shedding Due to Insufficient Sources and Storage
5.4. Load Shedding Due to Fault Occurring on the Demand Side
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Jacobson, M.Z.; Delucchi, M.A. A path to sustainable energy by 2030. Sci. Am. 2009, 301, 58–65. [Google Scholar] [CrossRef] [PubMed]
- Piagi, P.; Lasseter, R. Autonomous control of microgrids. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2006; p. 8.
- Lasseter, R. MicroGrids. In Proceedings of the IEEE Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; pp. 305–308.
- Porcarelli, D.; Brunelli, D.; Benini, L. Characterization of lithium-ion capacitors for low-power energy neutral wireless sensor networks. In Proceedings of the 2012 Ninth International Conference on Networked Sensing (INSS), Antwerp, Belgium, 11–14 June 2012; pp. 1–4.
- Ciezki, J.; Ashton, R. Selection and stability issues associated with a navy shipboard DC zonal electric distribution system. IEEE Trans. Power Deliv. 2000, 15, 665–669. [Google Scholar] [CrossRef]
- Rossi, M.; Brunelli, D. Forecasting data centers power consumption with the Holt-Winters method. In Proceedings of the 2015 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Trento, Italy, 9–10 July 2015; pp. 210–214.
- Salomonsson, D.; Soder, L.; Sannino, A. An Adaptive Control System for a DC Microgrid for Data Centers. IEEE Trans. Ind. Appl. 2008, 44, 1910–1917. [Google Scholar] [CrossRef]
- Brunelli, D.; Tamburini, L. Residential load scheduling for energy cost minimization. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Dubrovnik, Croatia, 13–16 May 2014; pp. 675–682.
- Sechilariu, M.; Wang, B.; Locment, F. Building integrated photovoltaic system with energy storage and smart grid communication. IEEE Trans. Ind. Electron. 2013, 60, 1607–1618. [Google Scholar] [CrossRef]
- Dondi, D.; Brunelli, D.; Benini, L.; Pavan, P.; Bertacchini, A.; Larcher, L. Photovoltaic cell modeling for solar energy powered sensor networks. In Proceedings of the 2007 2nd International Workshop on Advances in Sensors and Interface, Bari, Italy, 26–27 June 2007; pp. 1–6.
- Brunelli, D.; Rossi, M. Smart Grid Configuration Tool for HEES systems in smart city districts. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 137–142.
- Li, F.; Qiao, W.; Sun, H.; Wan, H.; Wang, J.; Xia, Y.; Xu, Z.; Zhang, P. Smart transmission grid: Vision and framework. IEEE Trans. Smart Grid 2010, 1, 168–177. [Google Scholar] [CrossRef]
- Engel, S.P.; Soltau, N.; Stagge, H.; Doncker, R.W.D. Dynamic and balanced control of three-phase high-power dual-active bridge DC 2013; DC converters in DC-Grid applications. IEEE Trans. Power Electron. 2013, 28, 1880–1889. [Google Scholar] [CrossRef]
- Xu, L.; Chen, D. Control and operation of a DC microgrid with variable generation and energy storage. IEEE Trans. Power Deliv. 2011, 26, 2513–2522. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Lukic, S.; Baran, M.E. On integration of solid-state transformer with zonal DC microgrid. IEEE Trans. Smart Grid 2012, 3, 975–985. [Google Scholar] [CrossRef]
- Jiang, W.; Fahimi, B. Active current sharing and source management in fuel cell-battery hybrid power system. IEEE Trans. Ind. Electron. 2010, 57, 752–761. [Google Scholar] [CrossRef]
- Planas, E.; Gil-de Muro, A.; Andreu, J.; Kortabarria, I.; Martínez de Alegría, I. General aspects, hierarchical controls and droop methods in microgrids: A review. Renew. Sustain. Energy Rev. 2013, 17, 147–159. [Google Scholar] [CrossRef]
- Schonberger, J.; Duke, R.; Round, S. DC-Bus signaling: A distributed control strategy for a hybrid renewable nanogrid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef]
- Chen, D.; Xu, L.; Yao, L. DC voltage variation based autonomous control of DC microgrids. IEEE Trans. Power Del. 2013, 28, 637–648. [Google Scholar] [CrossRef]
- Wang, X.; Guerrero, J.M.; Blaabjerg, F.; Chen, Z. A review of power electronics based microgrids. J. Power Electron. 2012, 12, 181–192. [Google Scholar] [CrossRef]
- Rossi, M.; Toppano, A.; Brunelli, D. Real-time optimization of the battery banks lifetime in Hybrid Residential Electrical Systems. In Proceedings of the 2014 Design, Automation Test in Europe Conference and Exhibition (DATE), Dresden, Germany, 24–28 March 2014; pp. 1–6.
- Ito, Y.; Zhongqing, Y.; Akagi, H. DC microgrid based distribution power generation system. In Proceedings of the 4th International Power Electronics and Motion Control Conference, Xi’an, China, 14–16 August 2004; pp. 1740–1745.
- Rossi, M.; Brunelli, D. Electricity demand forecasting of single residential units. In Proceedings of the 2013 IEEE Workshop on Environmental Energy and Structural Monitoring Systems, Trento, Italy, 11–12 September 2013; pp. 1–6.
- Yu, X.; She, X.; Zhou, X.; Huang, A. Power management for DC microgrid enabled by solid-state transformer. IEEE Trans. Smart Grid 2013, 5, 954–965. [Google Scholar] [CrossRef]
- Alliance, E. EMerge Alliance is a member of the U.S. Green Building Council, 2015. Available online: http://www.informationweek.com/news/201202317 (accessed on 14 March 2015).
- Systems Evaluation Group–Low Voltage Direct Current Applications, Distribution and Safety for Use in Developed and Developing Economies; International Electrotechnical Commission: Geneva, Switzerland, 2016.
- She, X.; Huang, A.Q.; Wang, G. 3-D space modulation with voltage balancing capability for a cascaded seven-level converter in a solid-state transformer. IEEE Trans. Power Electron. 2011, 26, 3778–3789. [Google Scholar] [CrossRef]
- ICF International. Energy 2016 Buildings-European Commission: Energy Performance of Buildings Directive Compliance Study; ICF International: Fairfax, VA, USA, 2015. [Google Scholar]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H. A decentralized control method for a low-voltage DC microgrid. IEEE Trans. Energy Convers. 2014, 29, 793–801. [Google Scholar] [CrossRef]
- Liu, X.; Wang, P.; Loh, P.C. A hybrid AC/DC microgrid and its coordination control. IEEE Trans. Smart Grid 2011, 2, 278–286. [Google Scholar]
- Porcarelli, D.; Brunelli, D.; Benini, L. Clamp-and-Forget: A self-sustainable non-invasive wireless sensor node for smart metering applications. Microelectron. J. 2014, 45, 1671–1678. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode of Operation | Main DC Bus | Sub HVDC Bus | Sub LVDC Bus | Power Flow |
|---|---|---|---|---|
| DCT Isolated | ≤ 355VDC | = 0 | ≤ 24.2 V | Power coming from locally available storage only. High power AC/DC load is switched off |
| Main Grid Interactive | 360 V ≤ ≤ 375 V | ≥ 280 V | 24.8 V ≤ ≤ 25.9 V | Power coming from renewable sources and AC main grid. All types of storage are kept isolated |
| Buffer State | 376 V ≤ ≤ 380 V | 280 V ≤ ≤ 300 V | 26 V ≤ ≤ 28.1 V | Power coming from renewable source and main grid. All types of storage are connected as a Load |
| Self-Reliance | 381 V ≤ ≤ 395 V | 280 V ≤ ≤ 300 V | 28.2 V ≤ ≤ 28.8 V | Power coming from renewable sources only. Maingrid is isolated. All types of storage are connected as a load |
| Power Sharing | ≫ 395 V | ≫ 300 V | 28.8 V ≤ ≤ 29.5 V | Power coming from renewable sources only. Maingrid and all type of storage are connected as a load |
| The High Power AC and DC Load output | |
| The Low voltage sensitive electronics load Output | |
| The Input Power from Renewable sources | |
| The Input Power from local distributed generators | |
| The Input Power from storage integrated with Main DC bus | |
| The Input Power from storage integrated with Sub HVDC bus | |
| The Input Power from storage integrated with Sub LVDC bus | |
| The input Power from AC main grid | |
| The Main DC bus voltage | |
| The Sub HVDC bus voltage | |
| The Sub LVDC bus voltage | |
| Secondary DC link voltage | |
| Secondary DC link voltage reference | |
| Input primary current | |
| d-axis current | |
| q-axis current | |
| d-axis current reference | |
| q-axis current reference | |
| Input primary voltage | |
| d-axis voltage of | |
| q-axis voltage of | |
| Output side low DC bus voltage | |
| Output side low DC bus voltage reference | |
| Phase shift | |
| Input side high DC link voltage | |
| Switching frequency | |
| Leakage inductance | |
| State of Charge of battery | |
| Battery storage current connected to sub DC bus | |
| Battery storage current reference |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younus, S.A.M.; Nardello, M.; Tosato, P.; Brunelli, D. Power Controlling, Monitoring and Routing Center Enabled by a DC-Transformer †. Energies 2017, 10, 403. https://doi.org/10.3390/en10030403
Younus SAM, Nardello M, Tosato P, Brunelli D. Power Controlling, Monitoring and Routing Center Enabled by a DC-Transformer †. Energies. 2017; 10(3):403. https://doi.org/10.3390/en10030403
Chicago/Turabian StyleYounus, Syed Ashad Mustufa, Matteo Nardello, Pietro Tosato, and Davide Brunelli. 2017. "Power Controlling, Monitoring and Routing Center Enabled by a DC-Transformer †" Energies 10, no. 3: 403. https://doi.org/10.3390/en10030403
APA StyleYounus, S. A. M., Nardello, M., Tosato, P., & Brunelli, D. (2017). Power Controlling, Monitoring and Routing Center Enabled by a DC-Transformer †. Energies, 10(3), 403. https://doi.org/10.3390/en10030403