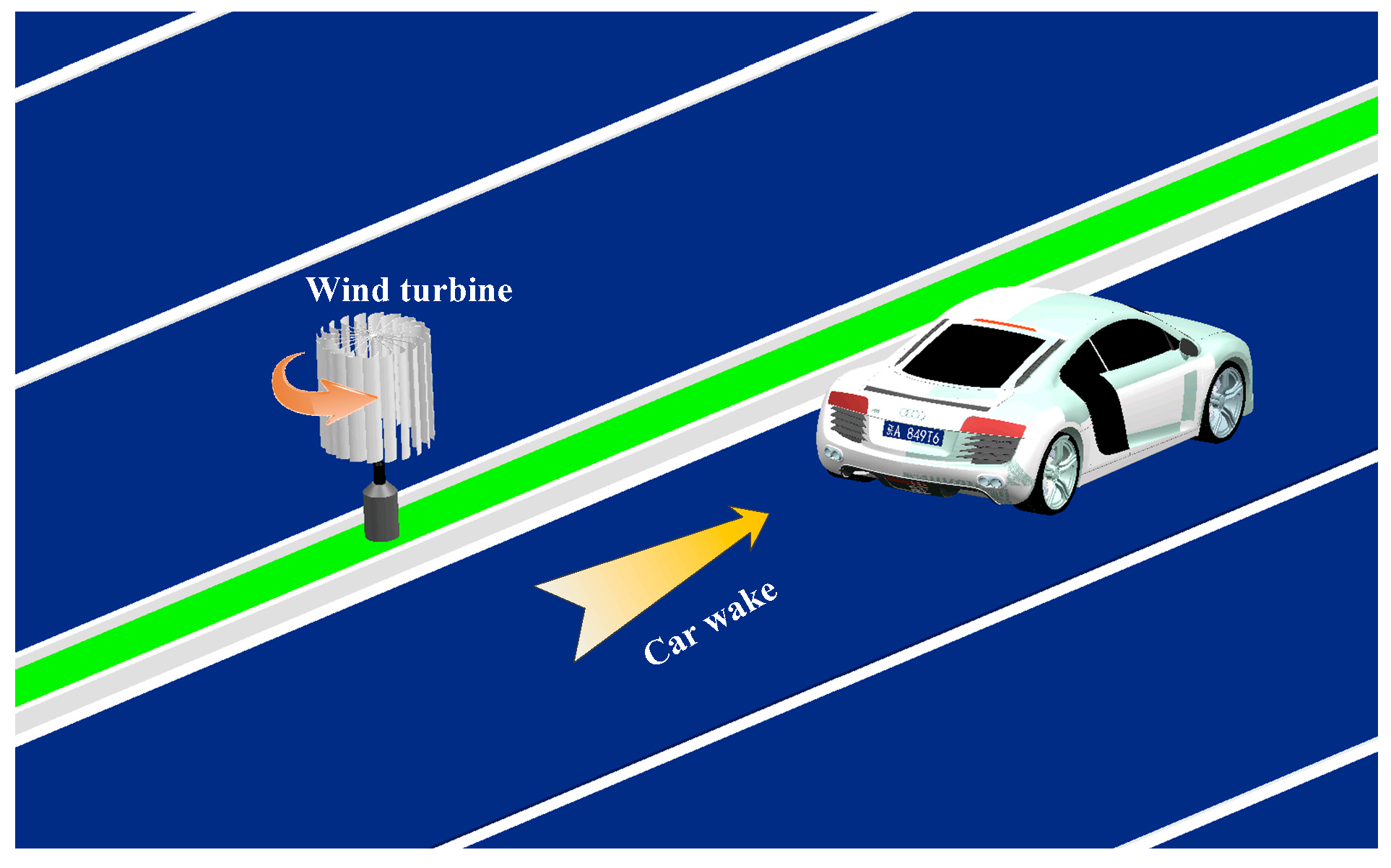
Numerical Simulations of a VAWT in the Wake of a Moving Car

Abstract
:1. Introduction
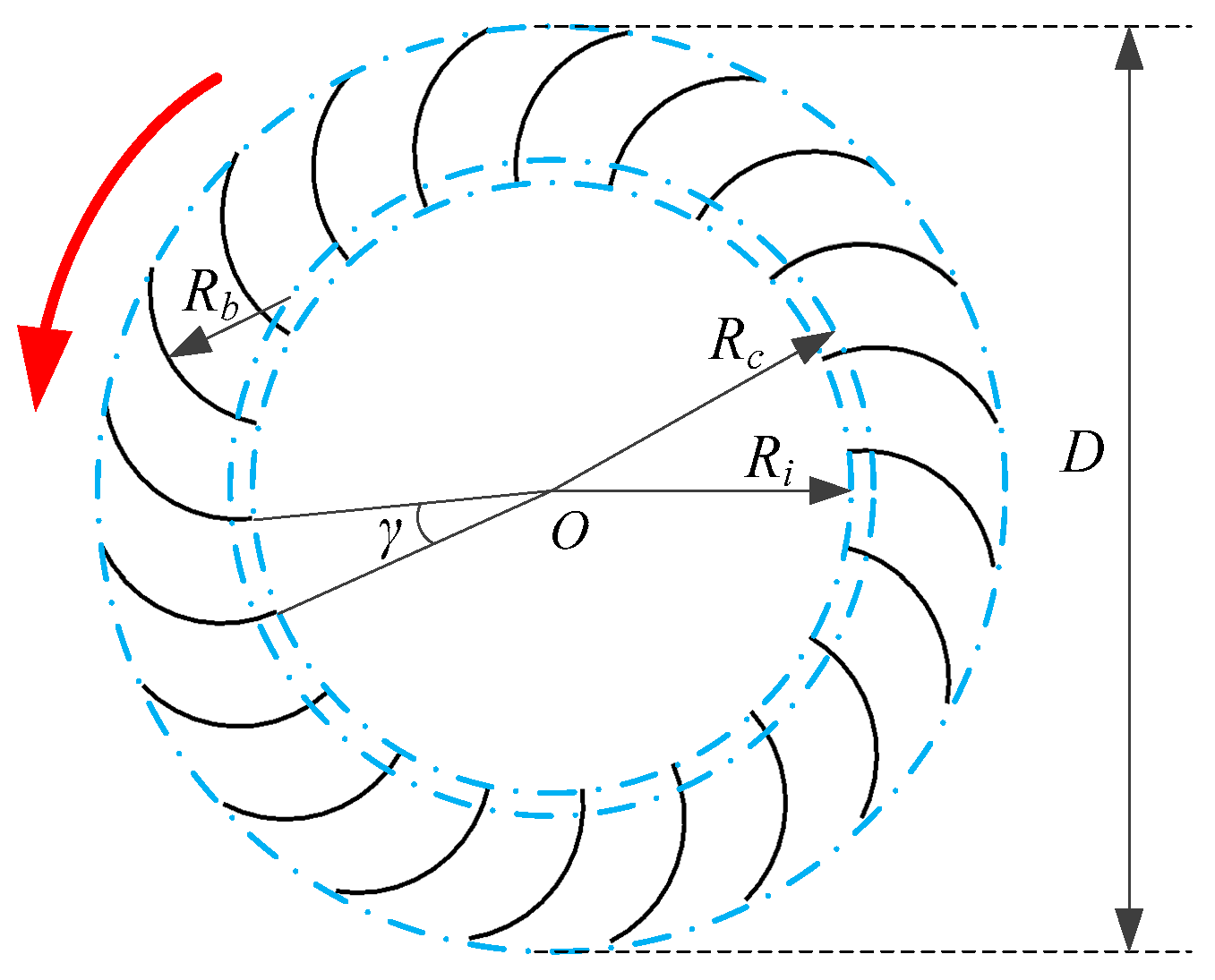
2. Model Simplification
3. Numerical Method
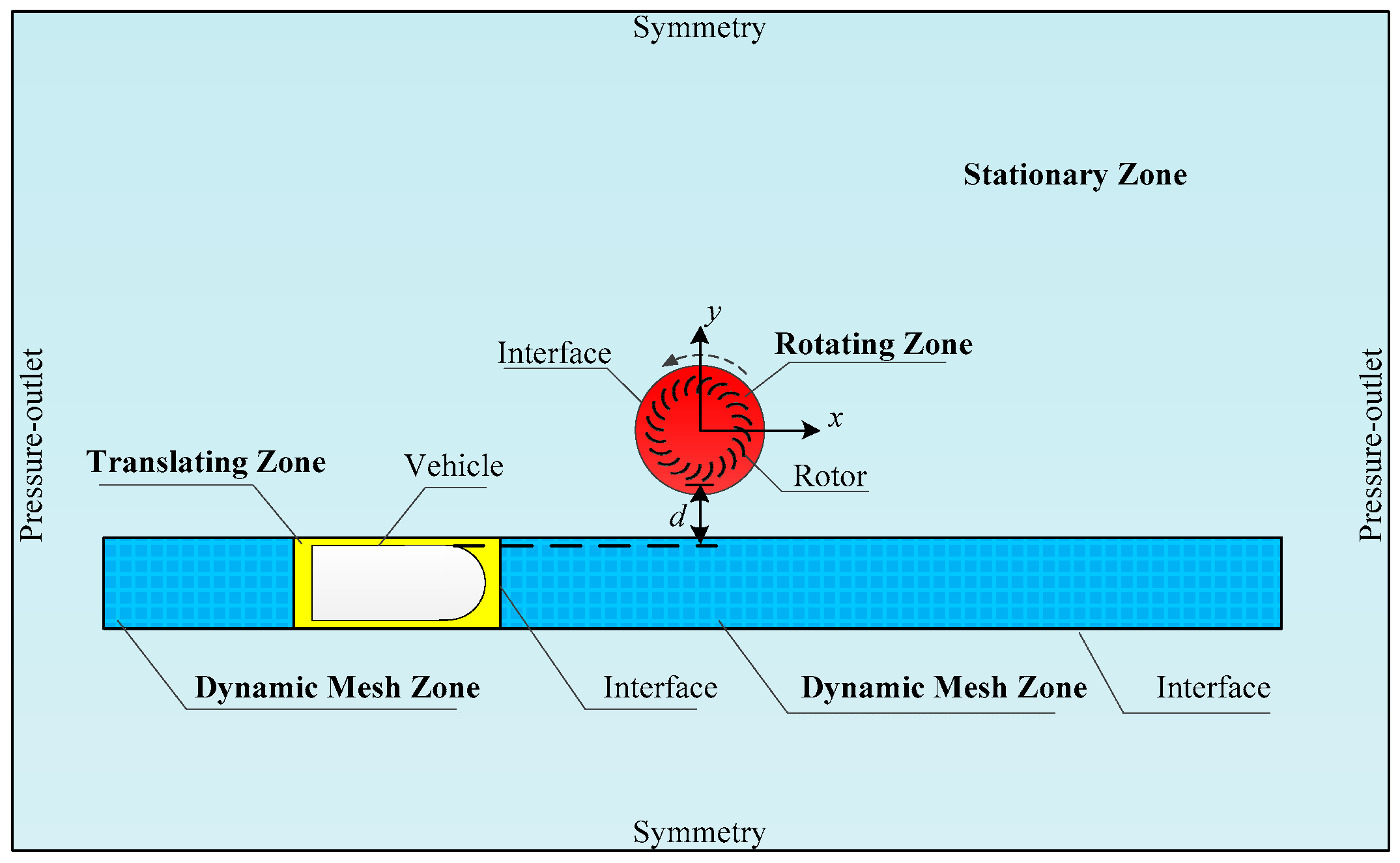
3.1. Computation Domains and Boundary Conditions
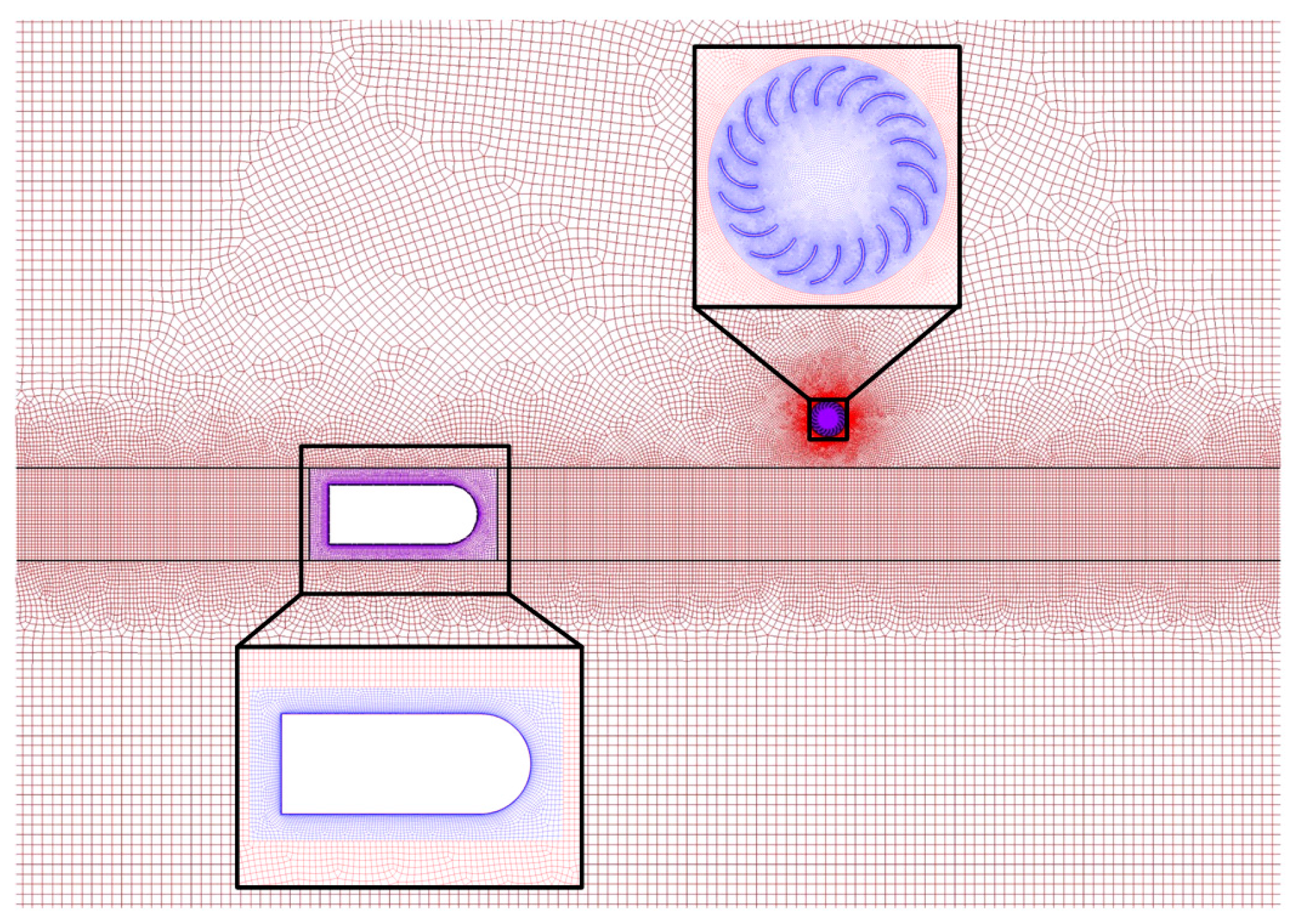
3.2. Mesh Generation
3.3. Solution Sets
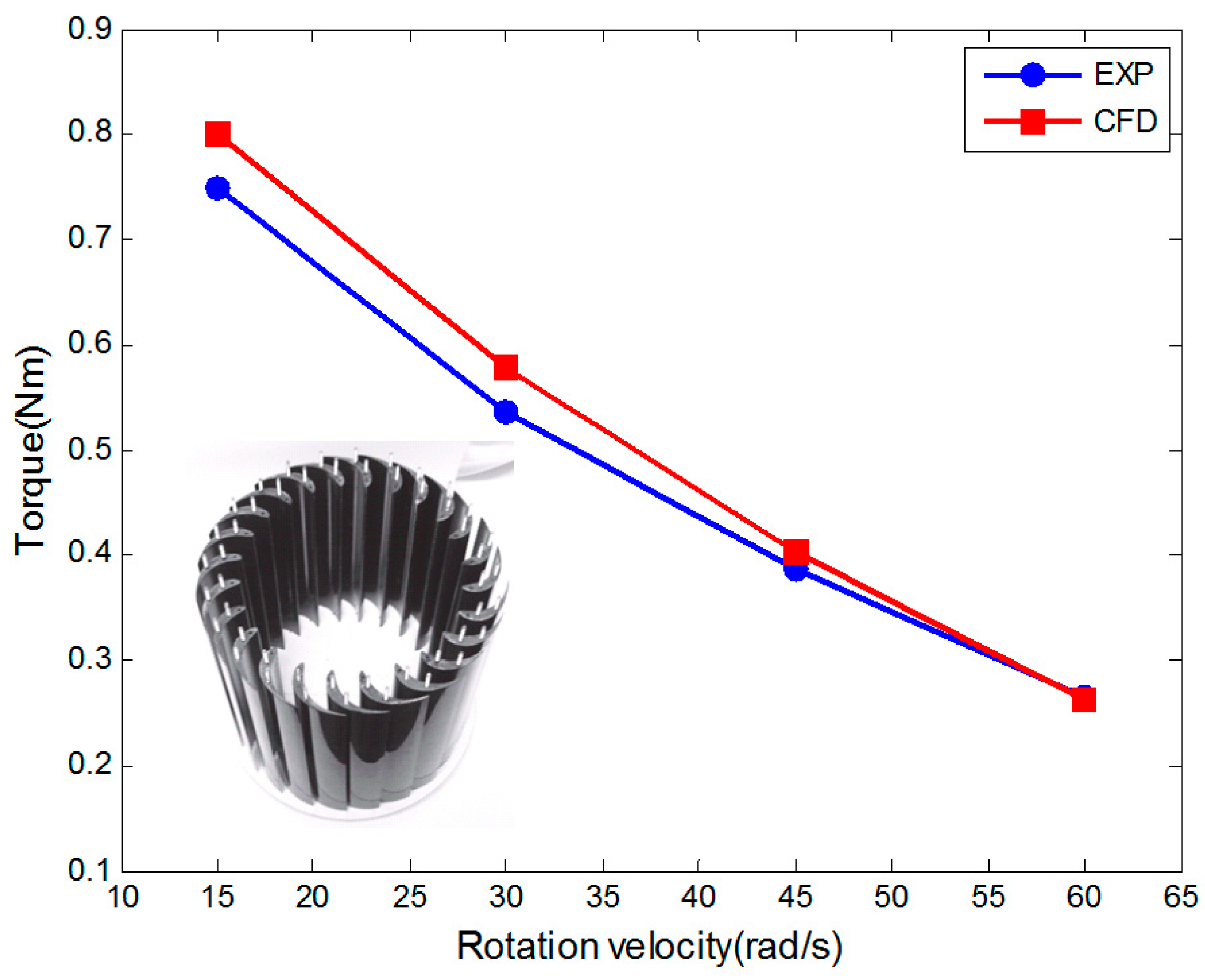
3.4. Numerical Method Validation
4. Results and Discussion
4.1. Influence of the Rotor Rotation Velocity on the Performance of the Rotor (Case One)
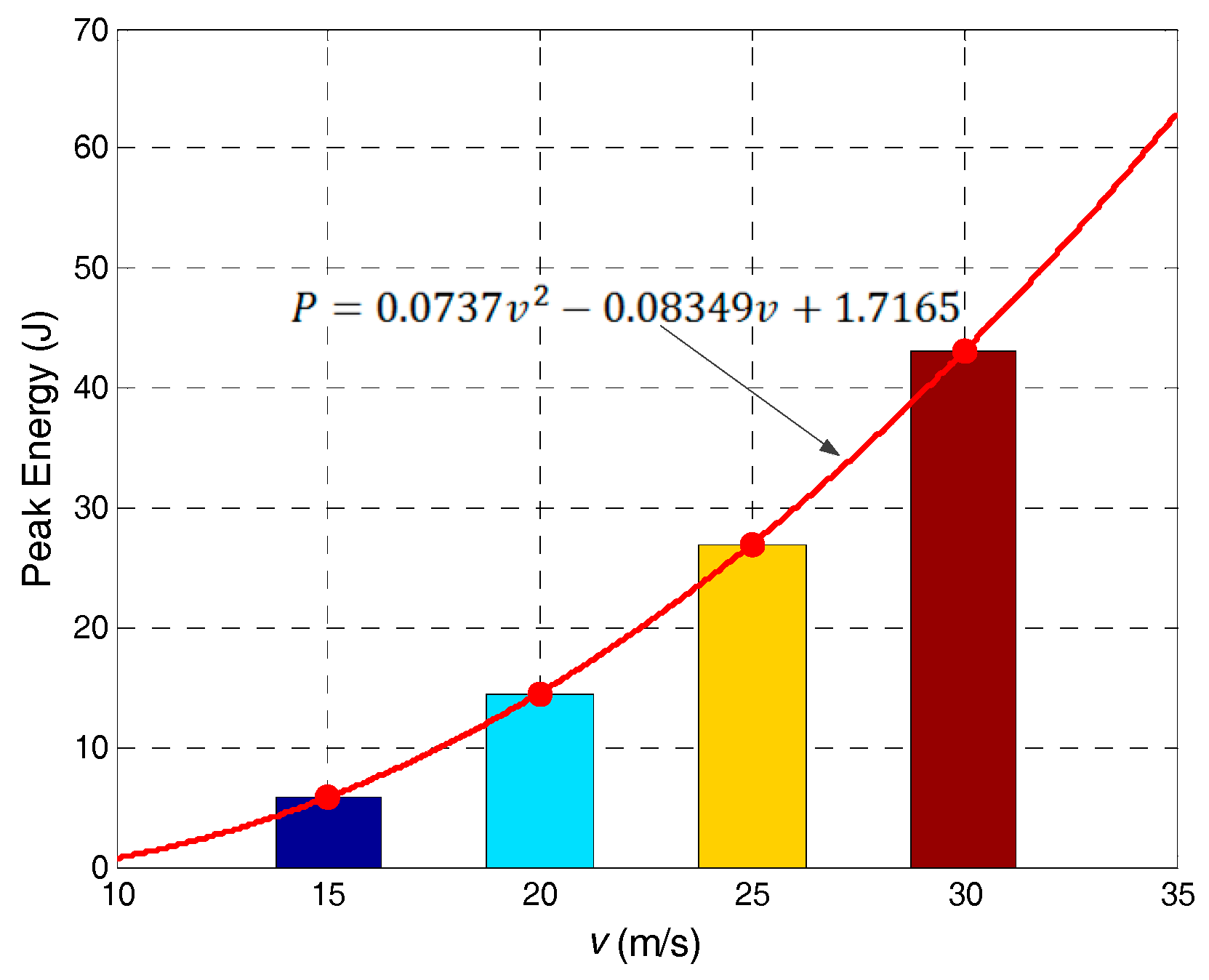
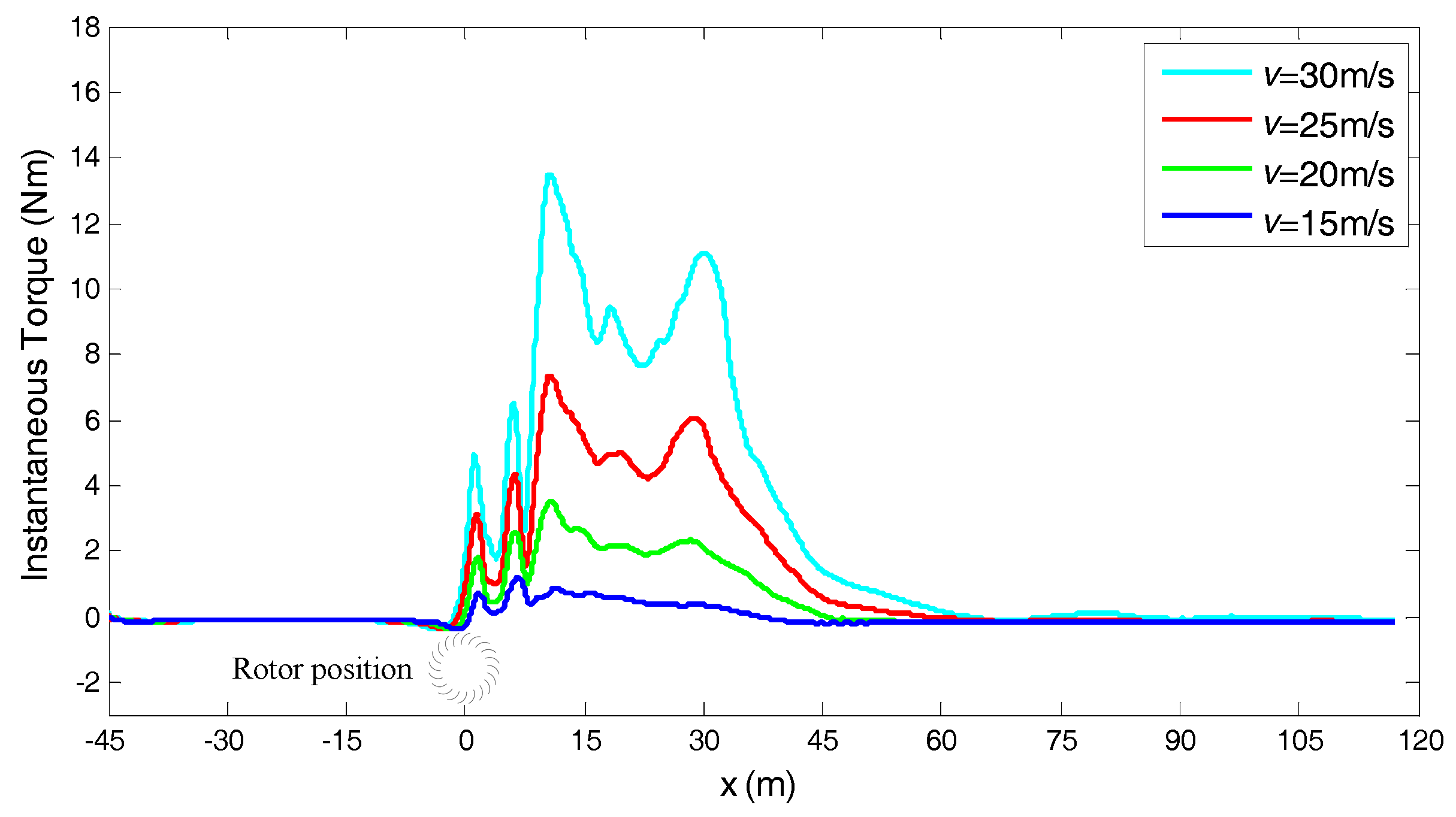
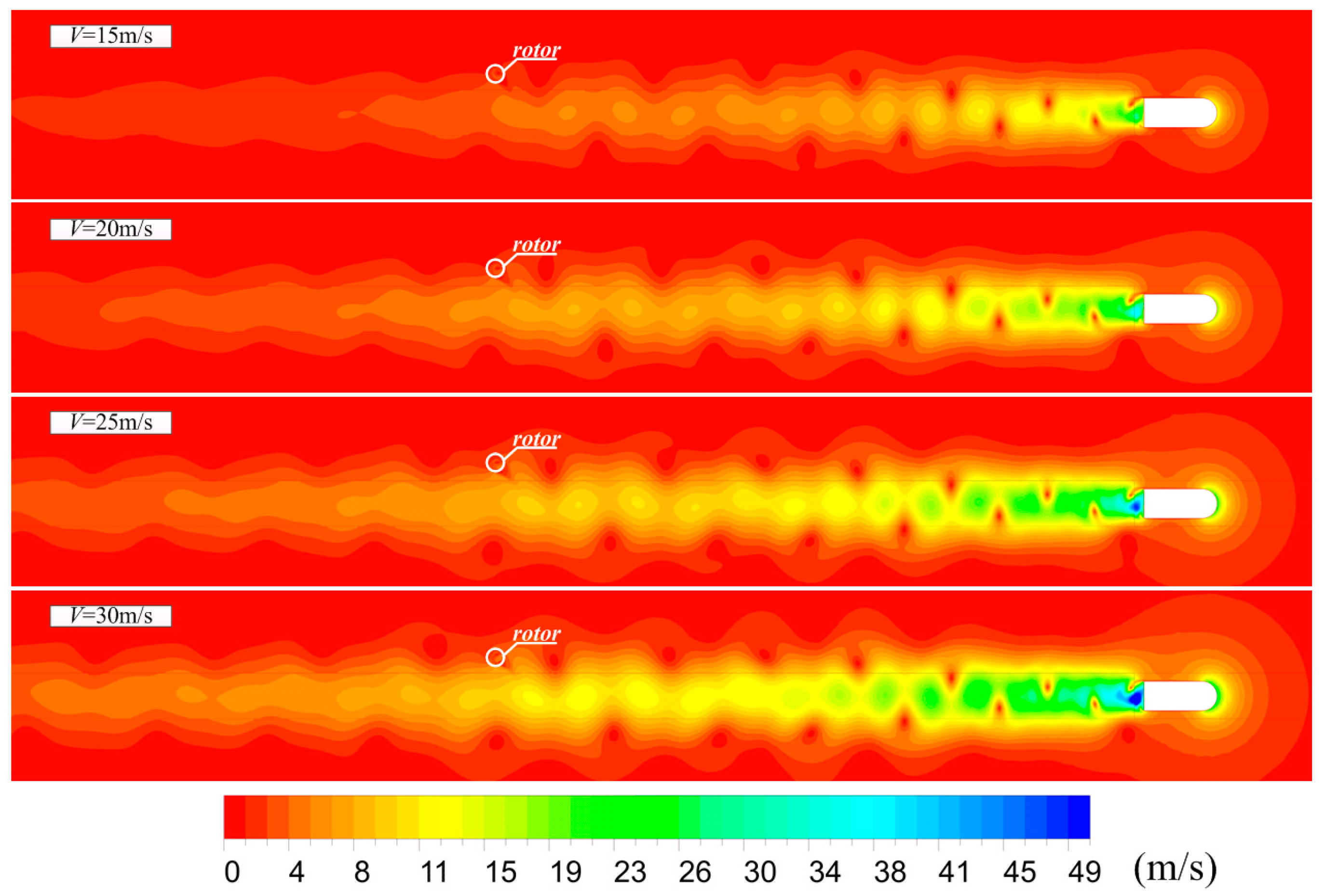
4.2. Influence of the Velocity of the Car on the Performance of the Rotor (Cases One to Four)
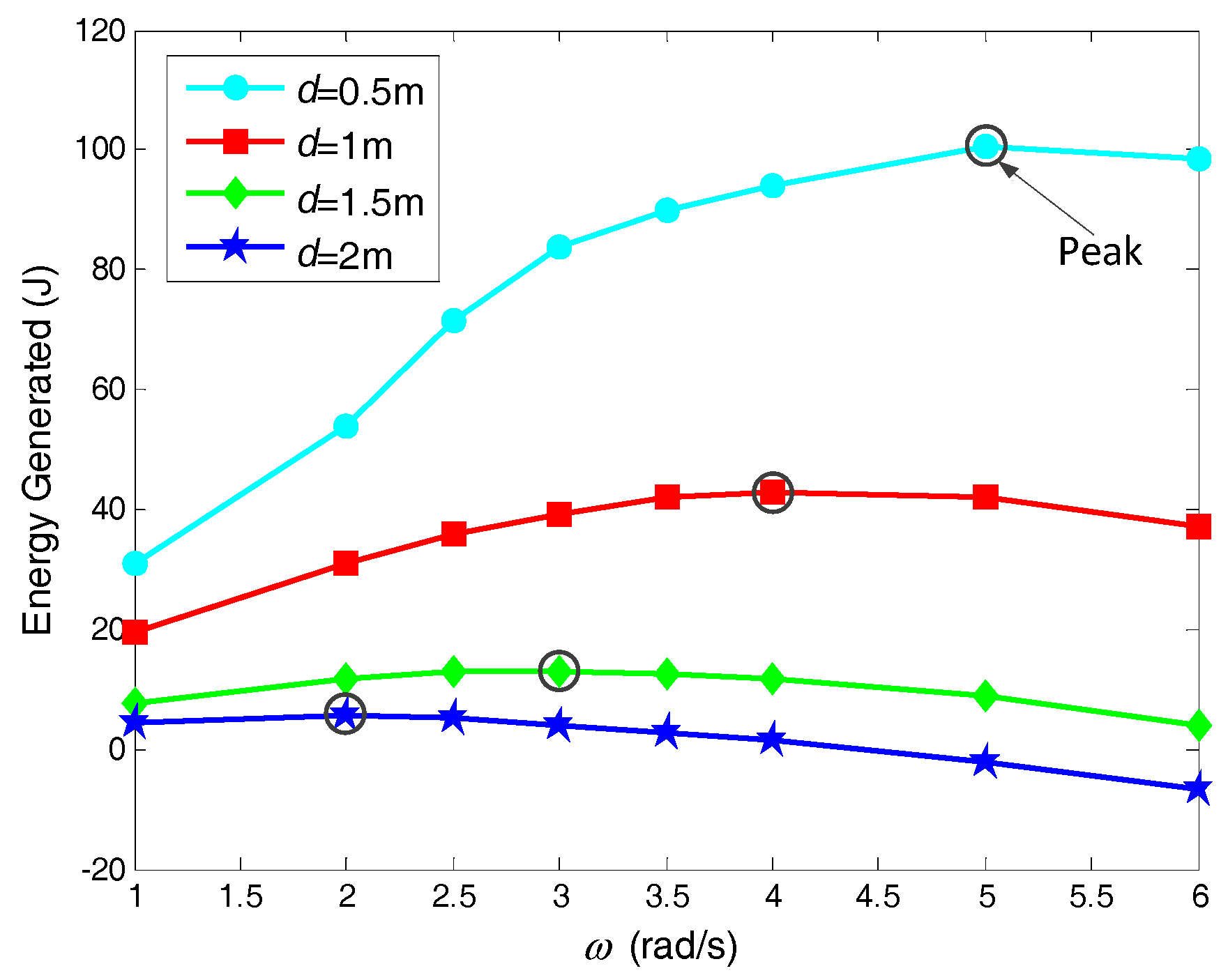
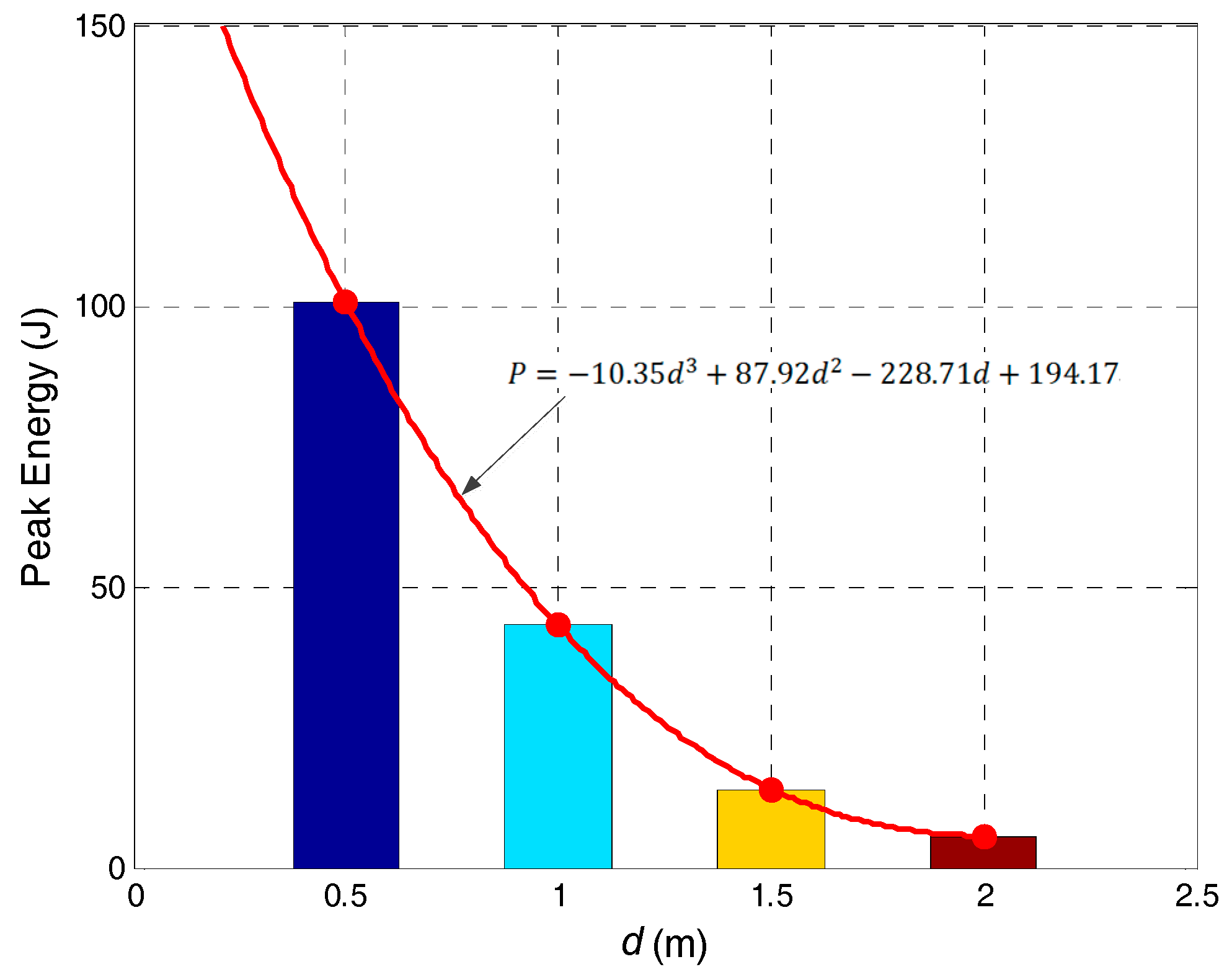
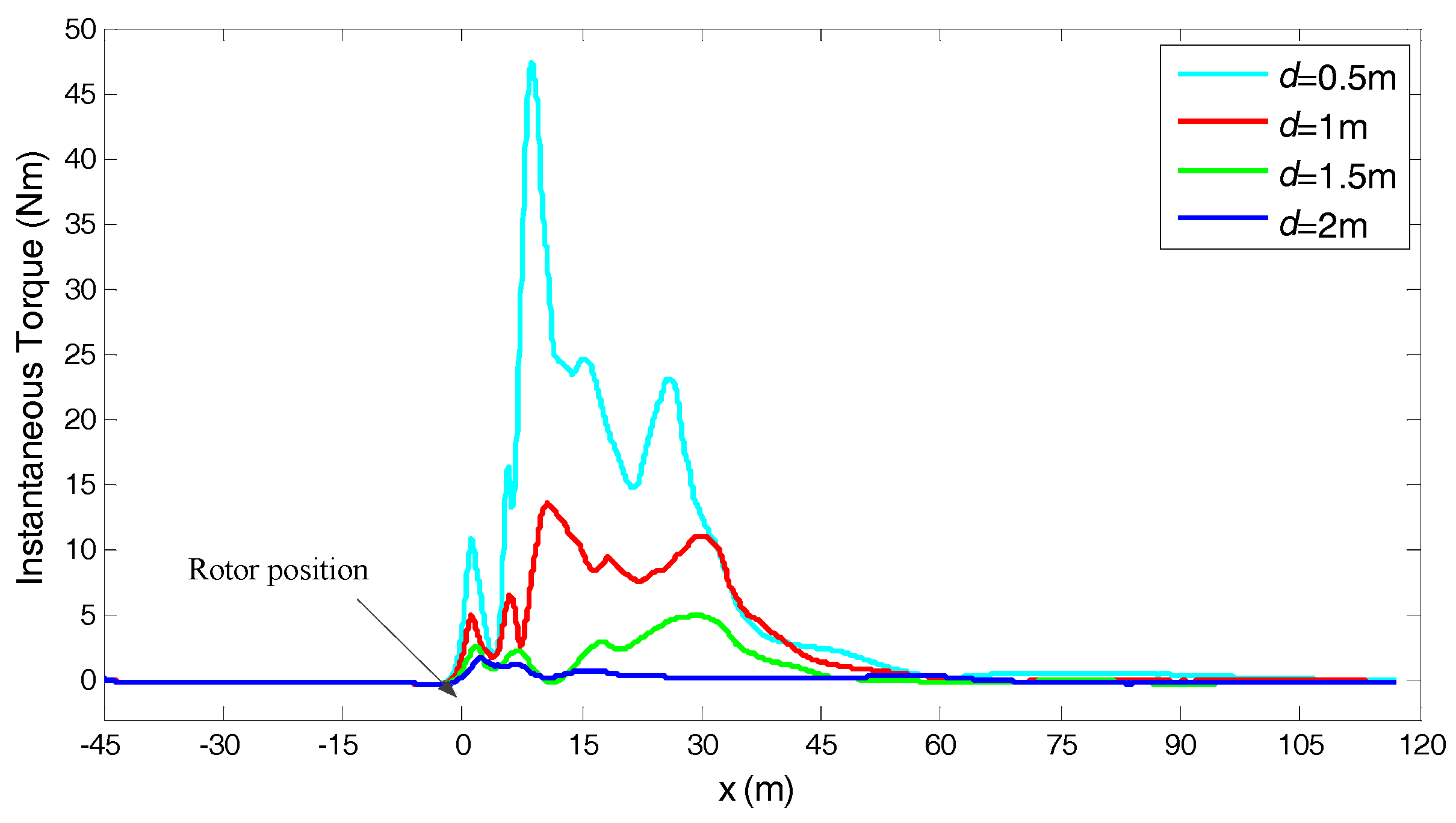
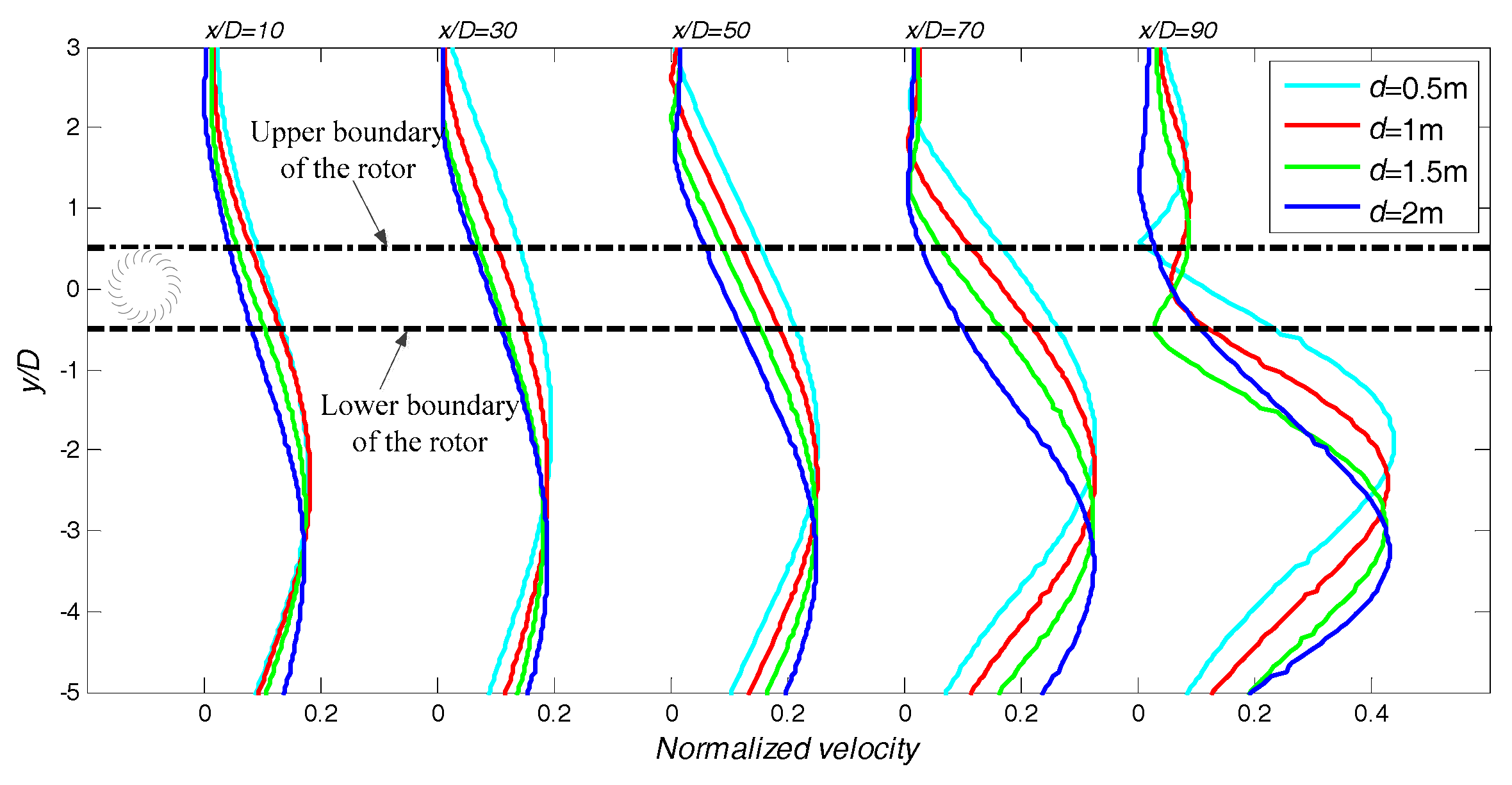
4.3. Influence of the Gap between the Rotor and the Car on the Performance of the Rotor (Cases One, Five to Seven)
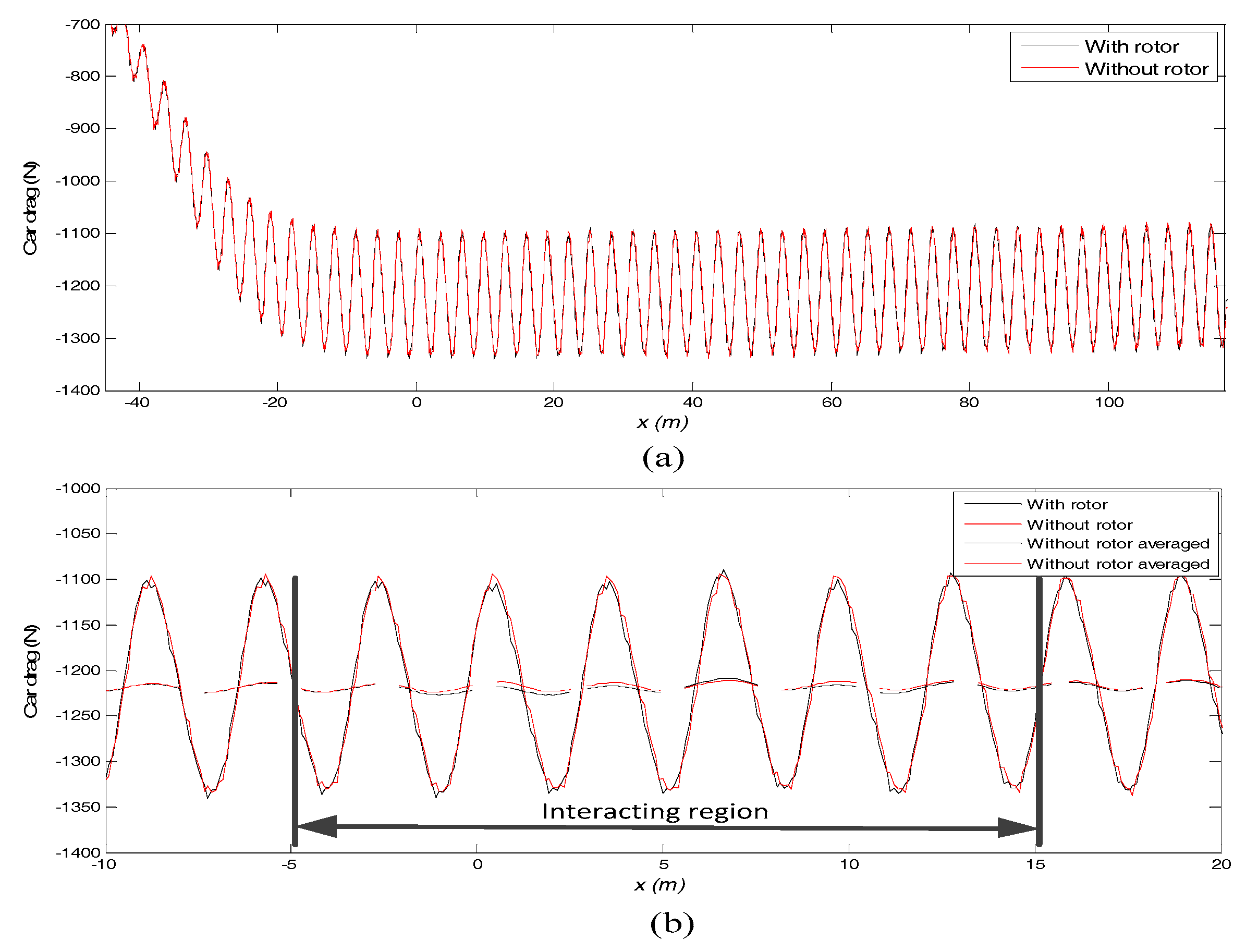
4.4. Energy Balance Analysis
5. Conclusions
- (1)
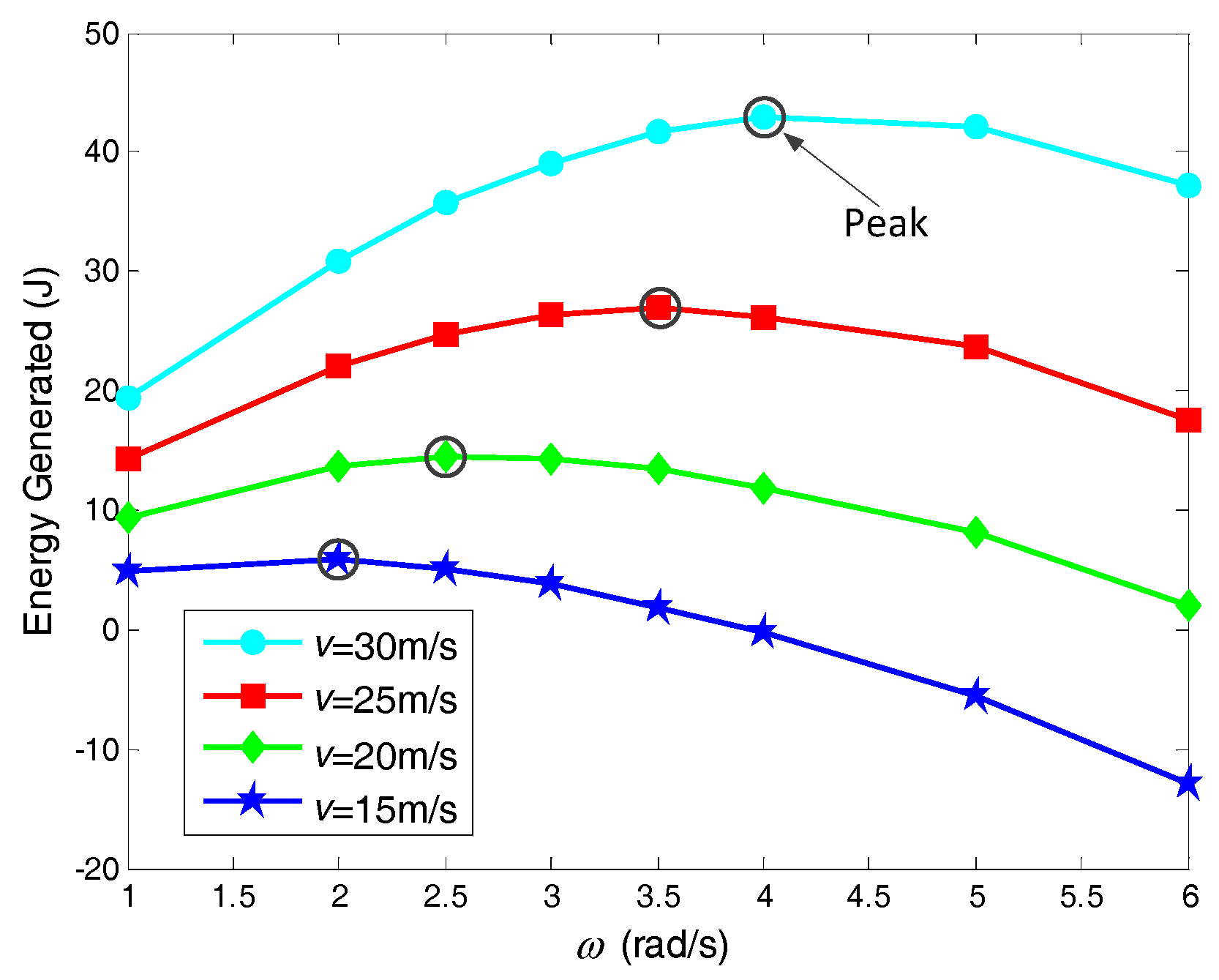
- In the tested cases, the rotor was able to generate a maximum of 100.49 J energy from the wake of a car with d = 0.5 m, v = 30 m/s and ω = 5 rad/s.
- (2)
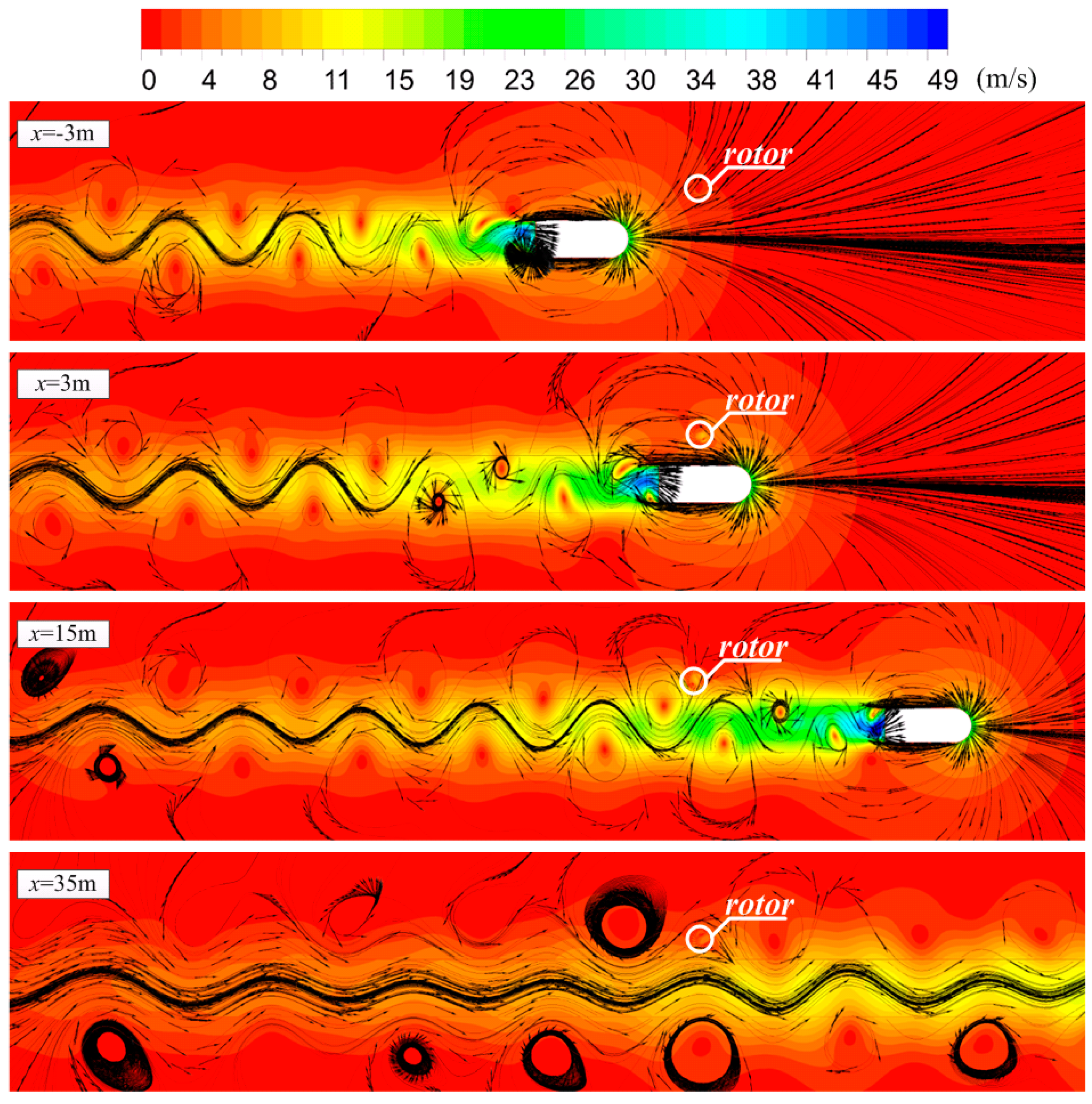
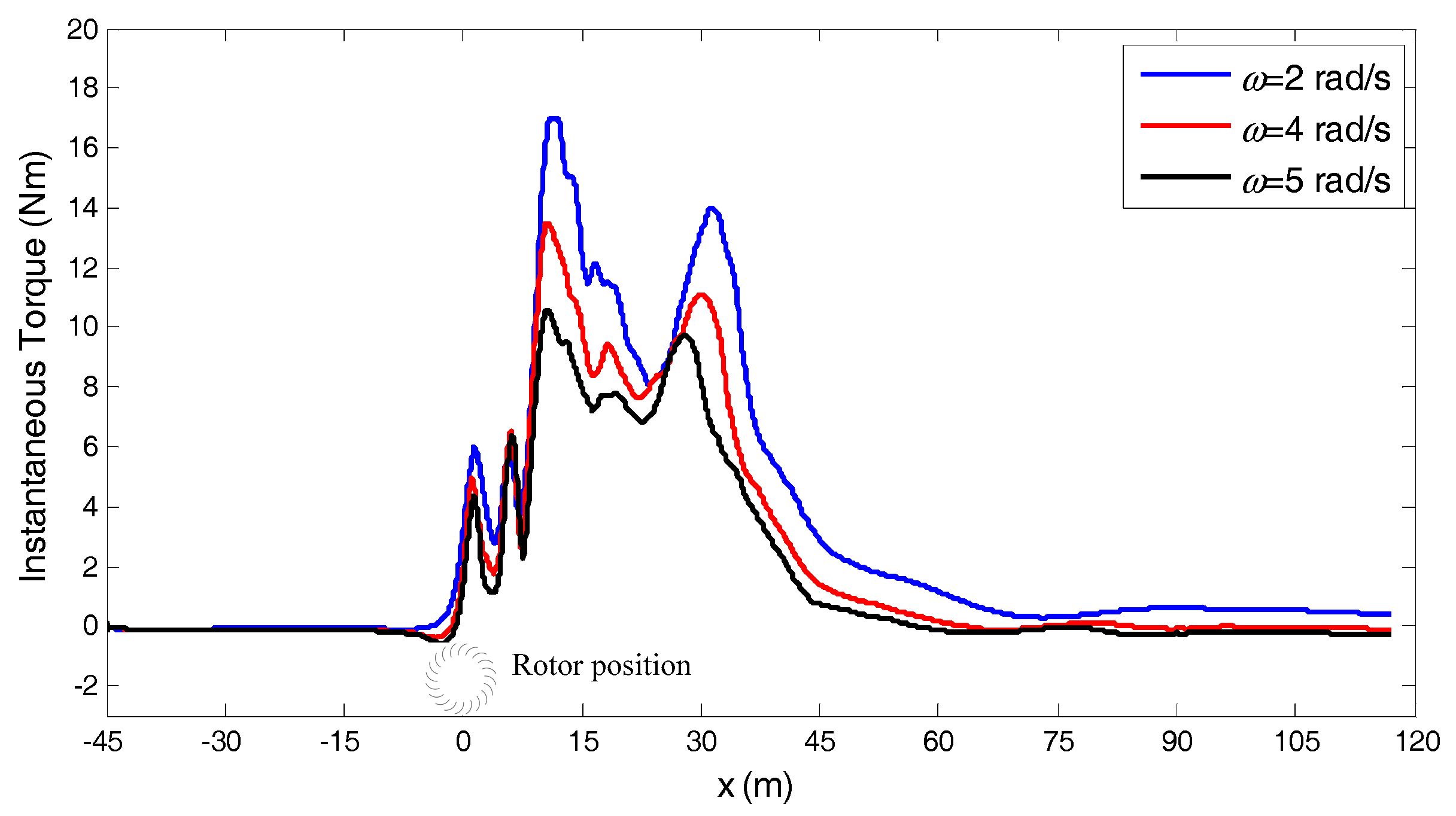
- The wake of the car was similar to the Kármán vortex street. The rotor was influenced by the repeating swirling vortices, and the torque of the rotor fluctuated significantly. Therefore, attention should be paid to the structure, strength, and design of the blades.
- (3)
- The performance of the rotor reduced with the velocity of the car, the reason being that a car with a smaller velocity generates a weaker wake, and the kinetic energy in the wake is reduced.
- (4)
- The performance of the rotor reduced with an increase in the gap between the turbine and the car, the reason being that the wake of the car is biased due to the gap and the velocity upstream of the rotor decreases with the increased gap.
- (1)
- Three-dimensional CFD simulations and field tests.
- (2)
- Tests on the influence of rotor types on the output power.
- (3)
- Tests on the performance of the turbine under the influence of multi-vehicles, and more complex highway conditions.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- China’s Highway Mileage 2015. Available online: http://www.china-highway.com/Home/News/bencandy/id/112770.html (accessed on 31 March 2017).
- Traffic Flow on Highways in July 2016. Available online: http://www.chinahighway.com/news/2016/1044542.php. (accessed on 31 March 2017)).
- Taskin, S.; Dursun, B. Performance assessment of a combined solar and wind system. Arab. J. Forence Eng. 2009, 34, 217–227. [Google Scholar]
- Krishnaprasanth, B.; Akshaya, P.R.; Manivannan, L.; Dhivya, N.A. new fangled highway wind power generation. IJRASET 2016, 4, 31–34. [Google Scholar]
- Murodiya, R.; Naidu, H. Design and Fabrication of Vertical Wind Turbine for Power Generation at Highway Medians. Int. Eng. J. Res. Dev. 2016, 1, 1–10. [Google Scholar]
- Champagnie, B.; Altenor, G.; Simonis, A. Highway Wind Energy: Florida International University. Bachelor’s Thesis, Florida International University, Miami, FL, USA, 21 November 2013. [Google Scholar]
- Basilio, M.J.A.; Bernardo, J.T.; Cuya, J.B.L.; Luzano, G.C.C. Harnessing of Electrical Energy through Vehicular Air Drag on Highways for Lighting Load Applications. Bachelor’s Thesis, Mapúa Institute of Technology, Manila, India, May 2013. [Google Scholar]
- Deglaire, P.; Engblom, S.; Ågren, O.; Bernhoff, H. Analytical solutions for a single blade in vertical axis turbine motion in two-dimensions. Eur. J. Mech.-B/Fluids 2009, 28, 506–520. [Google Scholar] [CrossRef]
- Li, Y.; Calisal, S.M. Three-dimensional effects and arm effects on modeling a vertical axis tidal current turbine. Renew. Energy 2010, 35, 2325–2334. [Google Scholar] [CrossRef]
- Lain, S.; Osorio, C. Simulation and evaluation of a straight-bladed Darrieus-type cross flow marine turbine. JSIR 2011, 69, 906–912. [Google Scholar]
- Howell, R.; Qin, N.; Edwards, J.; Durrani, N. Wind tunnel and numerical study of a small vertical axis wind turbine. Renew. Energy 2010, 35, 412–422. [Google Scholar] [CrossRef]
- Schönborn, A.; Chantzidakis, M. Development of a hydraulic control mechanism for cyclic pitch marine current turbines. Renew. Energy 2007, 32, 662–679. [Google Scholar] [CrossRef]
- Gupta, R.; Biswas, A. Computational fluid dynamics analysis of a twisted three-bladed H-Darrieus rotor. J. Renew. Sustain. Energy 2010, 2, 4418–4422. [Google Scholar] [CrossRef]
- Alaimo, A.; Esposito, A.; Messineo, A.; Orlando, C.; Tumino, D. Sciubba E. 3D CFD analysis of a vertical axis wind turbine. Energies 2015, 8, 3013–3033. [Google Scholar] [CrossRef]
- Hasan, M.R.; Islam, M.R.; Hasan Shahariar, G.M.; Mashud, M. Numerical analysis of vertical axis wind turbine. In Proceedings of the 9th International Forum on Strategic Technology, Cox’s Bazar, Bangladesh, 21–23 Octomber 2014; pp. 318–321. [Google Scholar]
- Pope, K.; Dincer, I.; Naterer, G.F. Energy and exergy efficiency comparison of horizontal and vertical axis wind turbines. Renew. Energy 2010, 35, 2102–2113. [Google Scholar] [CrossRef]
- Akwa, J.V.; Júnior, G.A.D.S.; Petry, A.P. Discussion on the verification of the overlap ratio influence on performance coefficients of a Savonius wind rotor using computational fluid dynamics. Renew. Energy 2012, 38, 141–149. [Google Scholar] [CrossRef]
- Saha, U.K.; Thotla, S.; Maity, D. Optimum design configuration of Savonius rotor through wind tunnel experiments. JWEIA 2008, 96, 1359–1375. [Google Scholar] [CrossRef]
- Irabu, K.; Roy, J.N. Study of direct force measurement and characteristics on blades of Savonius rotor at static state. Exp. Therm. Fluid Sci. 2011, 35, 653–659. [Google Scholar] [CrossRef]
- Kamoji, M.A.; Kedare, S.B.; Prabhu, S.V. Performance tests on helical savonius rotors. Renew. Energy 2009, 34, 521–529. [Google Scholar] [CrossRef]
- Golecha, K.; Eldho, T.I.; Prabhu, S.V. Influence of the deflector plate on the performance of modified Savonius water turbine. Appl. Energy 2011, 88, 3207–3217. [Google Scholar] [CrossRef]
- Kacprzak, K.; Liskiewicz, G.; Sobczak, K. Numerical investigation of conventional and modified savonius wind turbines. Renew. Energy 2013, 60, 578–585. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; Mao, Z. Numerical investigation of a savonius wind turbine with elliptical blades. Proc. CSEE 2014, 34, 5796–5802. [Google Scholar]
- Tian, W.; Song, B.; Vanzwieten, J.; Pyakurel, P. Computational fluid dynamics prediction of a modified savonius wind turbine with novel blade shapes. Energies 2015, 8, 7915–7929. [Google Scholar] [CrossRef]
- Tian, W.; Song, B.; Mao, Z. A numerical study on the improvement of the performance of a banki wind turbine. Wind Eng. 2014, 38, 109–116. [Google Scholar]
- Chiarelli, M.R.; Massai, A.; Russo, G.; Atzeni, D.; Bianco, F. A new configuration of vertical axis wind turbine for a distributed and efficient wind power generation system. Wind Eng. 2013, 37, 305–320. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D (m) | Ri (m) | Rc (m) | Rb (m) | γ (°) | H (m) |
|---|---|---|---|---|---|
| 1.0 | 0.33 | 0.36 | 0.147 | 18 | 1.0 |
| Case | Car Velocity (m/s) | Gap between Car and Rotor (d) (m) |
|---|---|---|
| 1 | 30 | 1 |
| 2 | 25 | 1 |
| 3 | 20 | 1 |
| 4 | 15 | 1 |
| 5 | 30 | 0.5 |
| 6 | 30 | 1.5 |
| 7 | 30 | 2 |
| Case Description | Averaged Drag (N) | Additional Drag (N) | Interacting Region (m) | Additional Energy for Drag (J) | Rotor Energy (J) | Net Energy (J) |
|---|---|---|---|---|---|---|
| With rotor | 1218.88 | −1.12 | 20 | −22.40 | 43.02 | 20.62 |
| Without rotor | 1217.76 | 0 | 20 | 0 | 0 | 0 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Mao, Z.; Li, Y. Numerical Simulations of a VAWT in the Wake of a Moving Car. Energies 2017, 10, 478. https://doi.org/10.3390/en10040478
Tian W, Mao Z, Li Y. Numerical Simulations of a VAWT in the Wake of a Moving Car. Energies. 2017; 10(4):478. https://doi.org/10.3390/en10040478
Chicago/Turabian StyleTian, Wenlong, Zhaoyong Mao, and Yukai Li. 2017. "Numerical Simulations of a VAWT in the Wake of a Moving Car" Energies 10, no. 4: 478. https://doi.org/10.3390/en10040478
APA StyleTian, W., Mao, Z., & Li, Y. (2017). Numerical Simulations of a VAWT in the Wake of a Moving Car. Energies, 10(4), 478. https://doi.org/10.3390/en10040478