
A Low-Order System Frequency Response Model for DFIG Distributed Wind Power Generation Systems Based on Small Signal Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Frequency Control Strategy and Response Characteristic of DFIG
- (A)
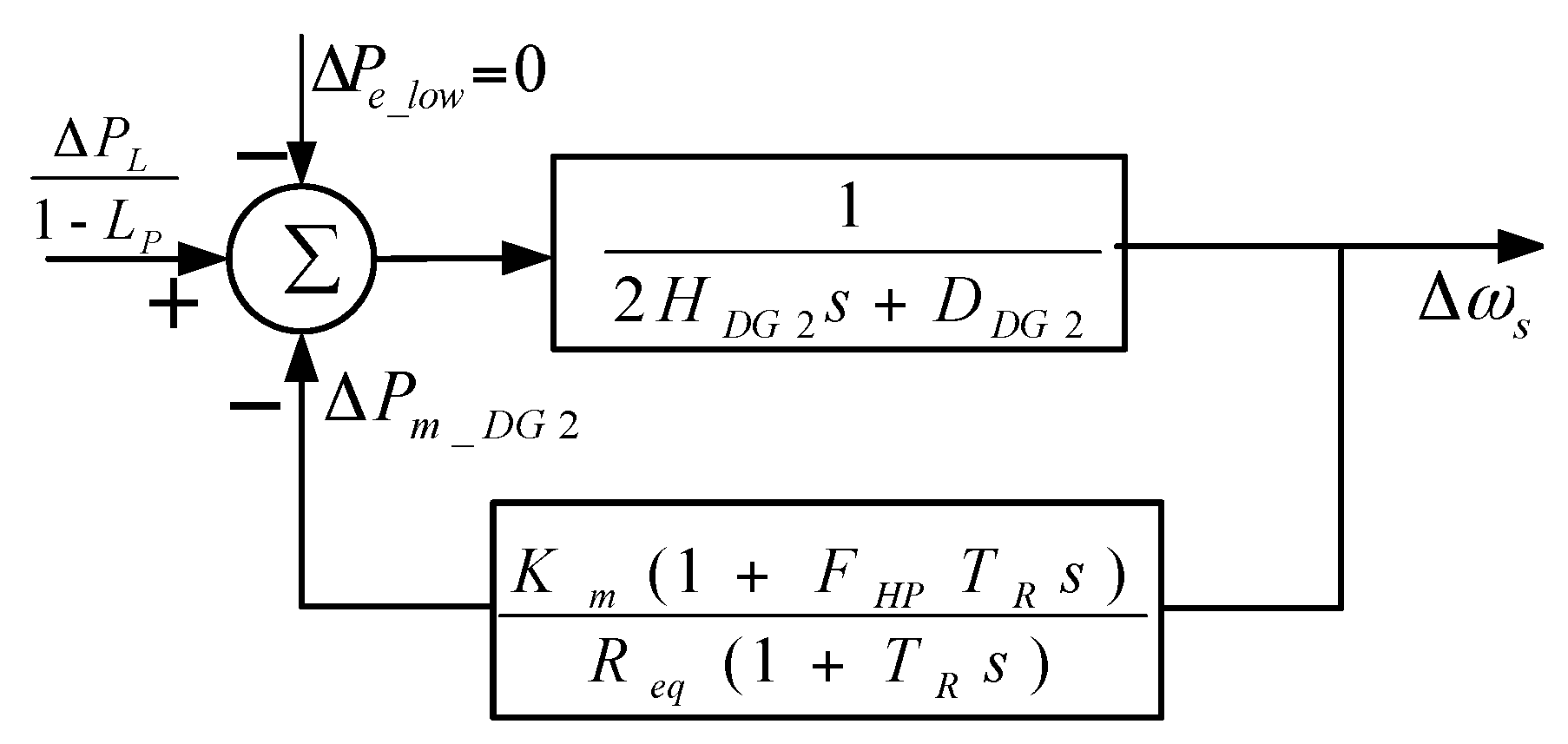
- Low wind condition: As the available reserve capacity provided by the DFIG is very low, maintaining the DFIG in a stable condition is the first priority. In other words, the DFIG will provide no frequency control during system frequency fluctuations. Furthermore, due to the fact that the rotor speed of a DFIG is decoupled from the dynamic system frequency, DFIG could hardly release or absorb rotor kinetic energy, like the inertia response from synchronous generators. Hence, under low wind conditions, the extra active power provided from a DFIG is almost zero during a frequency disturbance.
- (B)
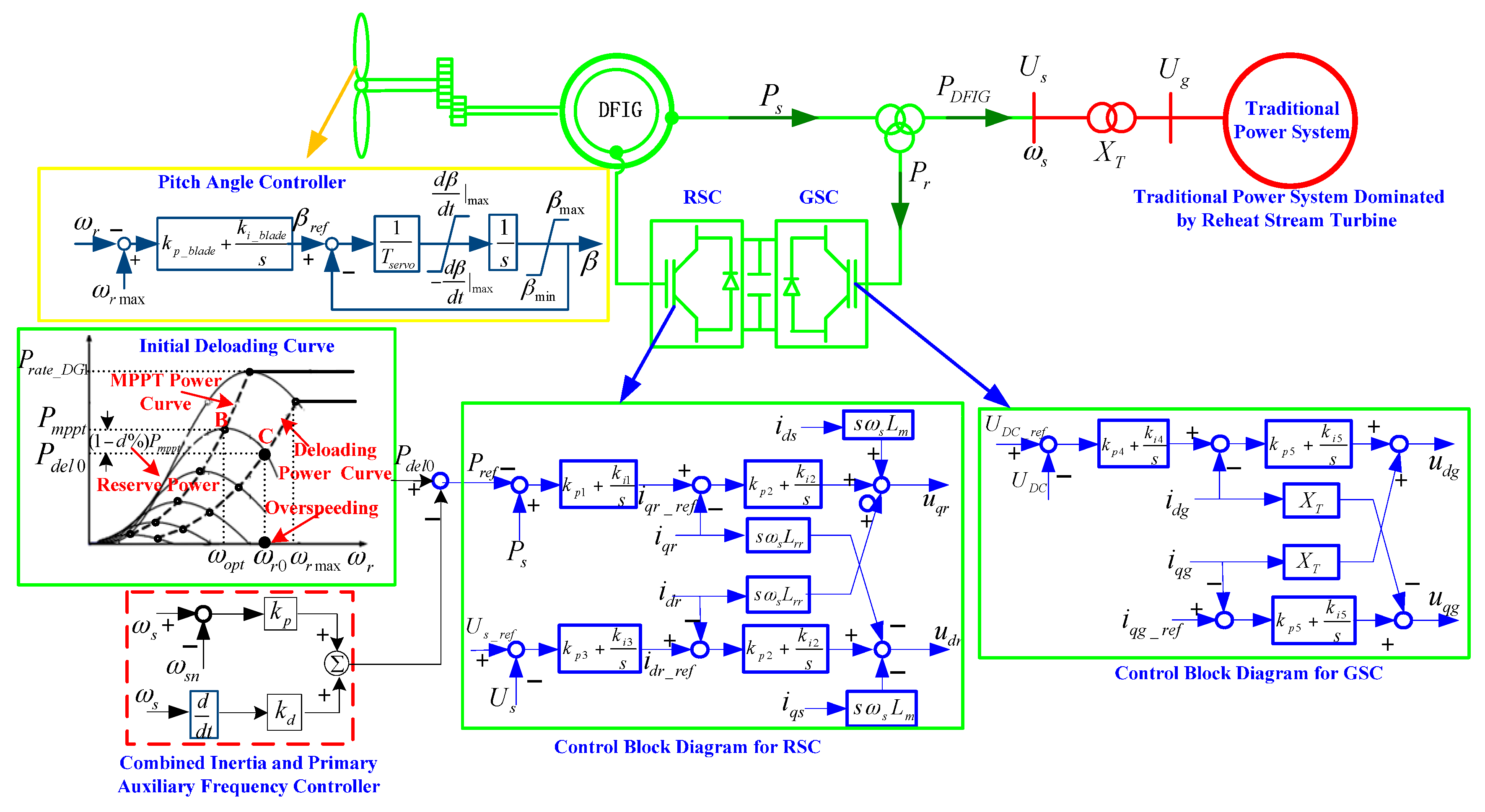
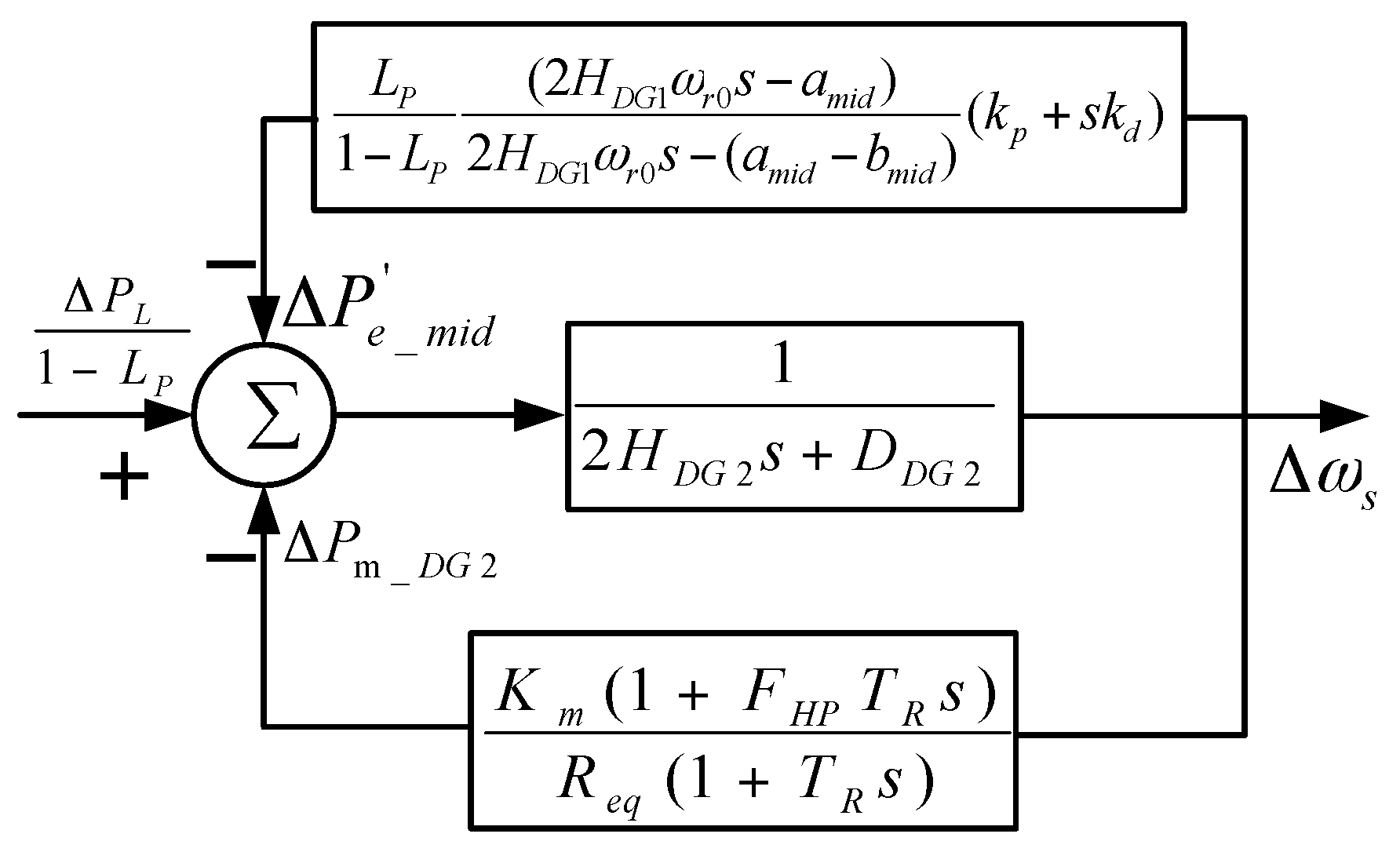
- Medium wind condition: In this wind region, DFIG can provide sufficient reserve capacity to participate in frequency control just by rotor over-speed regulation, and the pitch angle need not take an action (fixed at minimum angle ) just because the rotor speed could not exceed the upper limit . In order to make the novel SFR model derived in next section more representative, the original primary frequency control strategy in [8] is replaced by the combined inertia and primary control strategy [13,14,15,16,17] (shown in Figure 1) which is now more widely used. In addition, the reserve capacity command sent to the DFIG is set as a deloading rate d% [17] substituting for a fixed command . Once a frequency deviation happens in the system, the AFC will provide extra active power. Therefore, during the whole process of the frequency control, the output active power of DFIG can be expressed as:where, , represents the maximum power point tracking curve of DFIG in the medium wind region, and the deloading power point will deviate from the maximum power point by multiplying the deloading factor [17]. is the actual rotor speed, , is the air density, is the maximum wind power coefficient, is the optimal tip speed ratio, is the radius of wind blades, is the real-time frequency of power system, is the rated frequency, and , are the parameters of the AFC.As seen in Equation (1), it is important to note that the deloading power will be changed along with the actual rotor speed during the process of frequency control. More precisely, the changing amplitude is , but the key point is that the direction of the change is contrary to the extra active power provided by the AFC, causing an adverse effect on frequency control ability of the DFIG.
- (C)
- High wind condition: Above the rated wind speed, the DFIG should keep the torque and rotor speed less than the upper limit by pitch angle control. Therefore, unlike the medium wind condition, the output active power of the DFIG should be expressed as Equation (2) during the process of frequency control:where, is the rated torque, which is a constant value.
3. A Novel Low-Order SFR Model for DWPGS
3.1. Novel SFR Model under Low Wind Conditions
3.2. Novel SFR Model under Medium Wind Conditions
3.2.1. Impact of the Initial Operating Point on System Frequency Dynamics Based on the Novel SFR Model
3.2.2. Impact of Parameters of the AFC on System Frequency Dynamics Based on the Novel SFR Model
3.3. Novel SFR Model under High Wind Conditions
4. Validation of the Novel Low-Order SFR Model
4.1. Validation of the Novel SFR Model under Low Wind Condition
4.2. Validation of the Novel SFR Model under Medium Wind Conditions
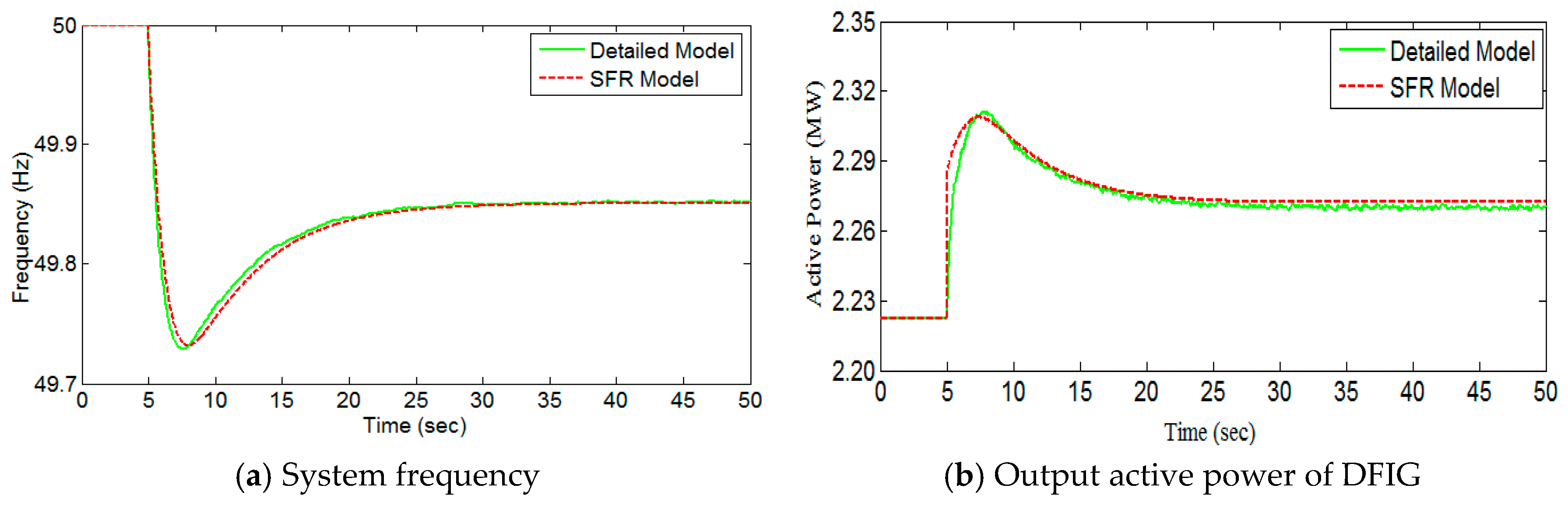
4.2.1. Validation of the Accuracy of the Novel SFR Model by Comparison with the Detailed Model
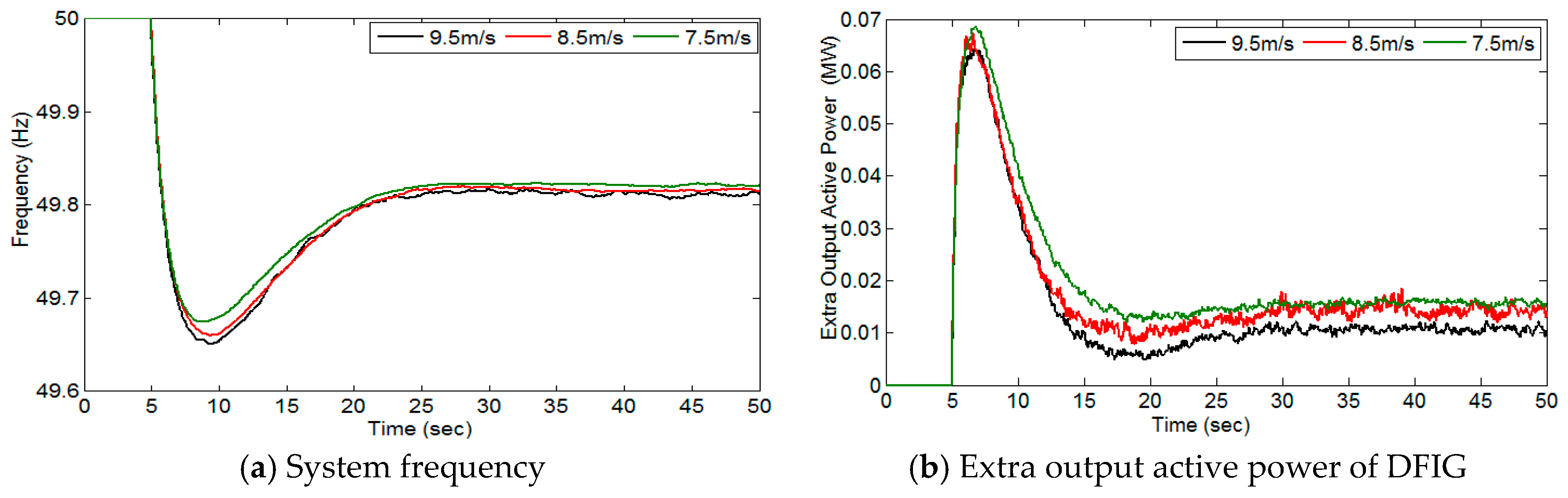
4.2.2. Validation of the Impact of the Initial Operation Point on the DFRC
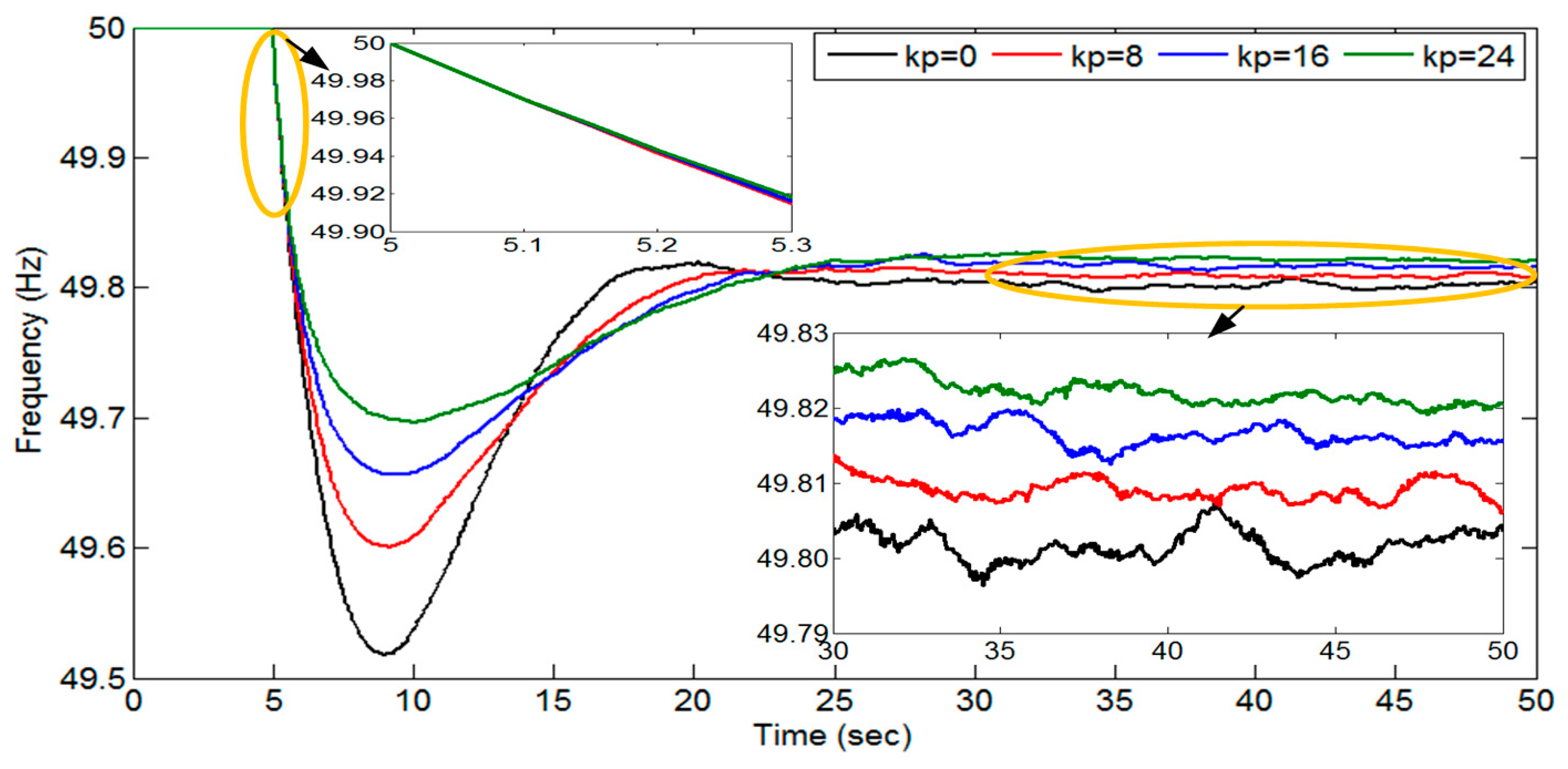
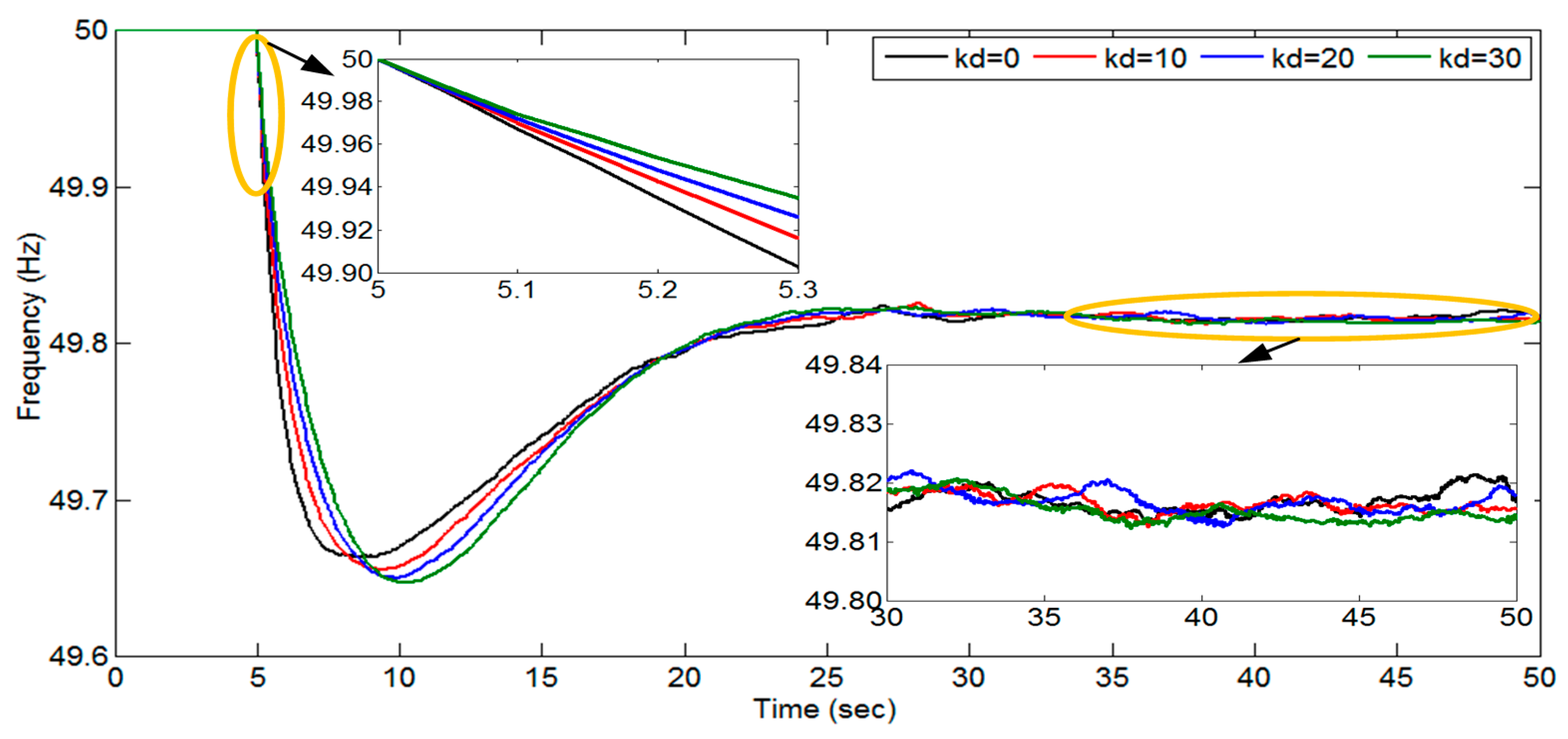
4.2.3. Validation of the Impact of the Control Parameters , of the AFC on the DFRC
4.3. Validation of the Novel SFR Model under High Wind Conditions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
Appendix B

References
- He, C.M.; Wang, H.T. Coordination frequency control strategy design of wind farm base on time sequence control. In Proceedings of the IEEE PES Asia-Pacific Power and Energy Engineering Conference, Beijing, China, 8–11 December 2013; pp. 1–6. [Google Scholar]
- Ekanayake, J.; Jenkins, N. Comparison of the response of doubly fed and fixed-speed induction generator wind turbines to changes in network frequency. IEEE Trans. Power Syst. 2004, 19, 800–802. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Arani, M.F.M.; EI-Saadany, E.F. Implementing Virtual Inertia in DFIG-Based Wind Power Generation. IEEE Trans. Power Syst. 2013, 28, 1373–1384. [Google Scholar] [CrossRef]
- Papadimitriou, C.N.; Vovos, N.A. Transient Response Improvement of Micro-grids Exploiting the Inertia of a Doubly-Fed Induction Generator (DFIG). Energies 2010, 3, 1049–1066. [Google Scholar] [CrossRef]
- Licari, J.; Ekanayake, J.; Moore, I. Inertia response from full-power converter-based permanent magnet wind generators. J. Mod. Power Syst. Clean Energy 2013, 1, 26–33. [Google Scholar] [CrossRef]
- Keung, P.K.; Li, P.; Banakar, H.; Ooi, B.T. Kinetic energy of wind turbine generators for system frequency support. IEEE Trans. Power Syst. 2009, 24, 279–287. [Google Scholar] [CrossRef]
- Chang-Chien, L.R.; Lin, W.T.; Yin, C.Y. Enhancing frequency response control by DFIGs in the high wind penetrated power systems. IEEE Trans. Power Syst. 2011, 26, 710–718. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Pan, W.X.; Quan, R.; Wang, F.A. Variable droop control strategy for doubly-fed induction generators. DianliXitong Zidonghua 2015, 39, 126–131. [Google Scholar]
- Ullah, N.R.; Thiringer, T.; Karlssom, D. Temporary primary frequency control support by variable speed wind turbines-potential and applications. IEEE Trans. Power Syst. 2008, 23, 601–602. [Google Scholar] [CrossRef]
- De-Almeida, R.G.; Pecas-Lopes, J.A. Participation of doubly fed induction wind generators in system frequency regulation. IEEE Trans. Power Syst. 2007, 22, 944–950. [Google Scholar] [CrossRef]
- Ma, H.T.; Chowdhury, B.H. Working towards frequency regulation with wind plants: Combined control approaches. IET Renew. Power Gener. 2010, 4, 308–316. [Google Scholar] [CrossRef]
- Ghosh, S.; Kamalasadan, S.; Senroy, N. Doubly fed induction generator (DFIG)-based wind farm control framework for primary frequency and inertia response application. IEEE Trans. Power Syst. 2016, 31, 1861–1871. [Google Scholar] [CrossRef]
- Ding, L.; Qiao, Y.; Lu, Z.X. Impact on frequency regulation of power system from wind power system with high penetration. DianliXitong Zidonghua 2014, 38, 1–8. [Google Scholar]
- Wang, Y.; Deille, G.; Bayem, H. High wind power penetration in isolated power system—Assessment of wind inertia and primary frequency response. IEEE Trans. Power Syst. 2013, 28, 2412–2420. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhene, C.N. Frequency sensitivity analysis of load damping co-efficient in wind farm-integrated power system. IEEE Trans. Power Syst. 2017, 32, 1016–1029. [Google Scholar]
- Doherty, R.; Mullane, A.; Nolan, G. An assessment of the impact of wind generation on system frequency control. IEEE Trans. Power Syst. 2010, 25, 452–460. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. An adaptive method for setting under frequency load shedding relays. IEEE Trans. Power Syst. 1992, 7, 647–655. [Google Scholar] [CrossRef]
- Aik, D.L.H. A general-order system frequency response model incorporating load shedding: Analytic modeling and application. IEEE Trans. Power Syst. 2006, 21, 709–717. [Google Scholar] [CrossRef]
- Lin, J.; Li, G.J.; Sun, Y.Z.; Li, X. Small-signal analysis and control system parameter optimization for DFIG wind turbines. DianliXitong Zidonghua 2009, 33, 86–90. [Google Scholar]
- Ragavan, K.; Satish, L. An efficient method to compute transfer function of a transformer from its equivalent circuit. IEEE Trans. Power Deliv. 2005, 20, 780–788. [Google Scholar] [CrossRef]
- Liu, W.Y.; Ge, R.D.; Lv, Q.C.; Li, H.Y.; Ge, J.B. Research on a small signal stability region boundary model of the interconnected power system with large-scale wind power. Energies 2015, 8, 2312–2336. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill Professional: New York, NY, USA, 1994; pp. 792–804. [Google Scholar]
- Zhang, Z.S.; Sun, Y.Z.; Li, G.J.; Cheng, L.; Lin, J. Frequency regulation by doubly fed induction generator wind turbines based on coordinated over-speed control and pitch control. DianliXitong Zidonghua 2011, 35, 20–25. [Google Scholar]
- Wu, F.; Zhang, X.P.; Godfrey, K. Small signal stability analysis and optimal control of a wind turbine with doubly fed induction generator. IET Gener. Trans. Distrib. 2007, 1, 751–760. [Google Scholar] [CrossRef]













© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quan, R.; Pan, W. A Low-Order System Frequency Response Model for DFIG Distributed Wind Power Generation Systems Based on Small Signal Analysis. Energies 2017, 10, 657. https://doi.org/10.3390/en10050657
Quan R, Pan W. A Low-Order System Frequency Response Model for DFIG Distributed Wind Power Generation Systems Based on Small Signal Analysis. Energies. 2017; 10(5):657. https://doi.org/10.3390/en10050657
Chicago/Turabian StyleQuan, Rui, and Wenxia Pan. 2017. "A Low-Order System Frequency Response Model for DFIG Distributed Wind Power Generation Systems Based on Small Signal Analysis" Energies 10, no. 5: 657. https://doi.org/10.3390/en10050657
APA StyleQuan, R., & Pan, W. (2017). A Low-Order System Frequency Response Model for DFIG Distributed Wind Power Generation Systems Based on Small Signal Analysis. Energies, 10(5), 657. https://doi.org/10.3390/en10050657