
Modeling and Validation of a Diesel Engine with Turbocharger for Hardware-in-the-Loop Applications

 and
and
Abstract
:1. Introduction
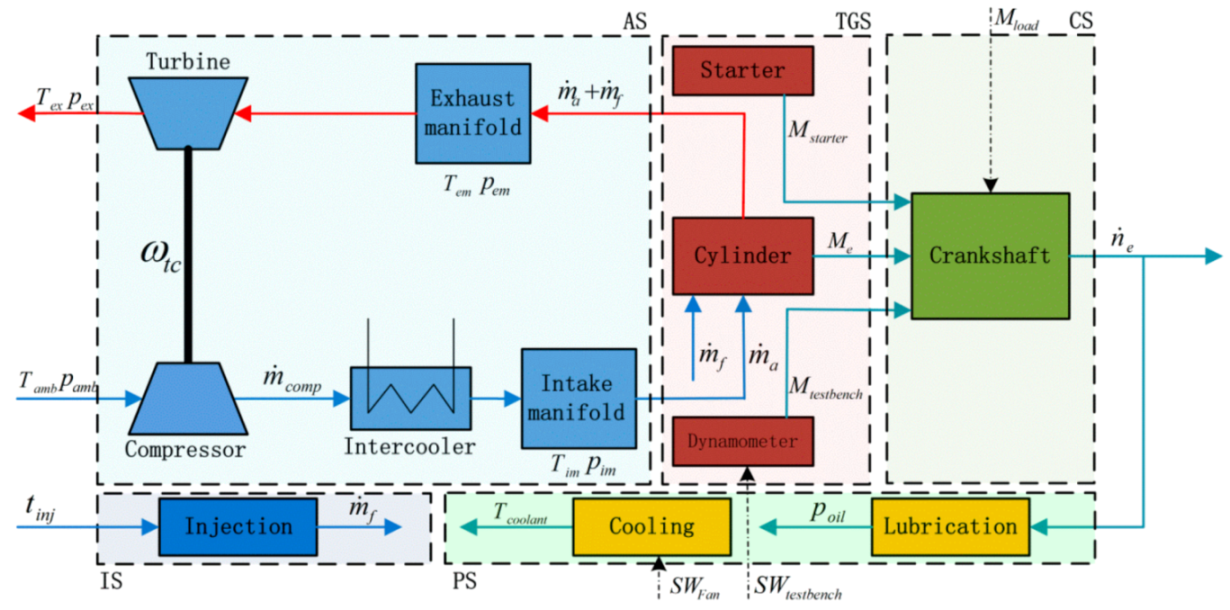
2. Diesel Engine Modeling
2.1. Air System
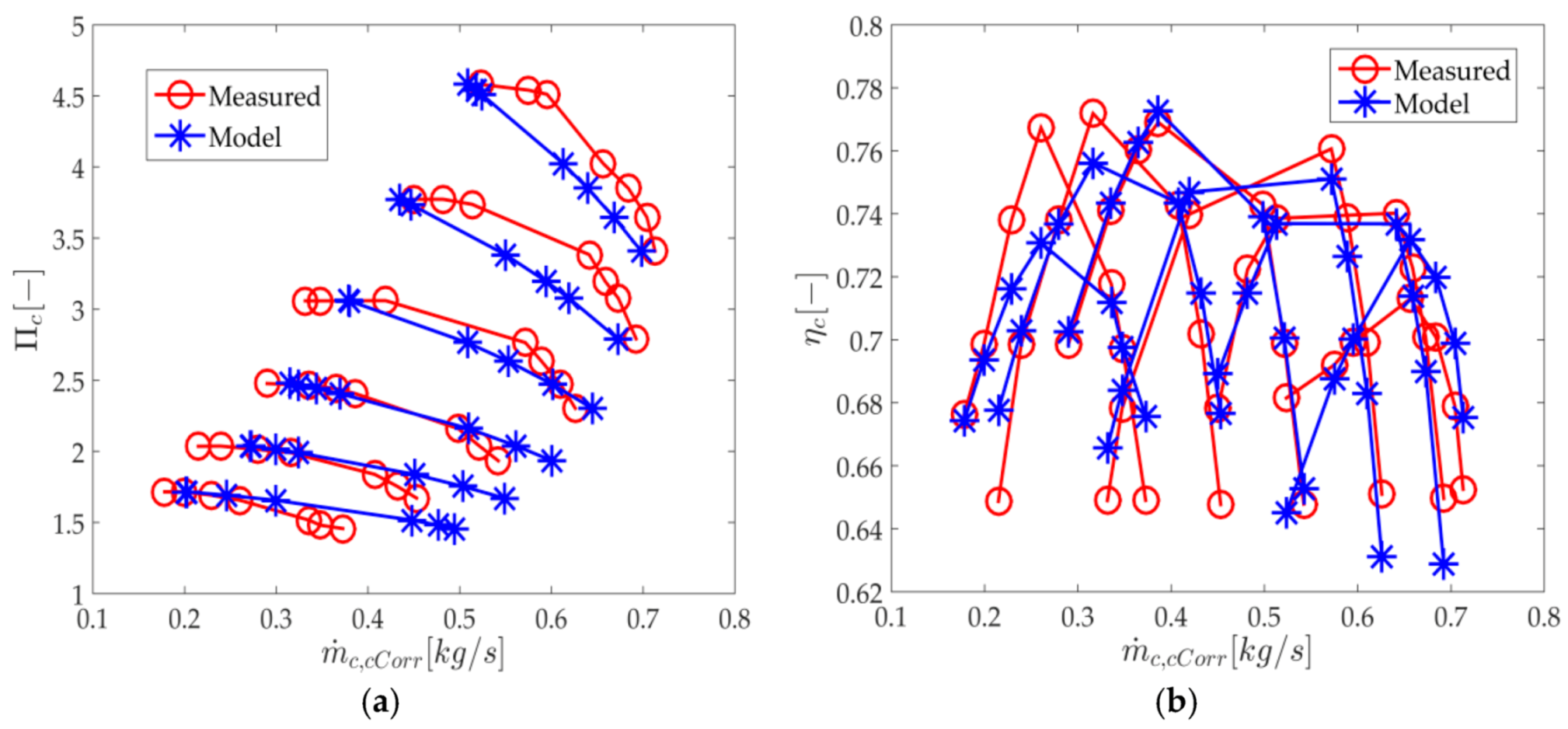
2.1.1. Turbocharger
2.1.2. Intercooler
2.1.3. Manifold
2.1.4. Air Mass into the Cylinder
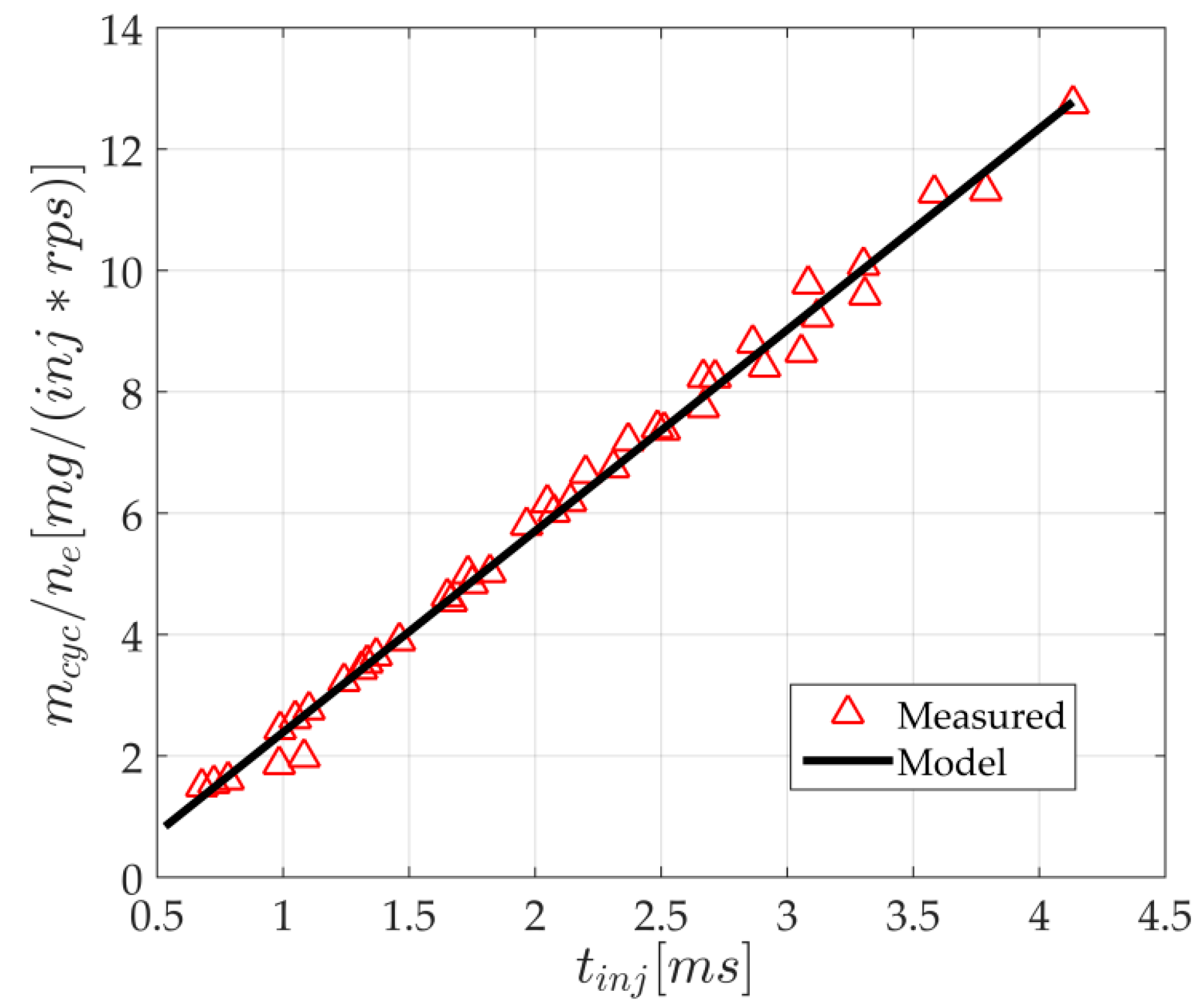
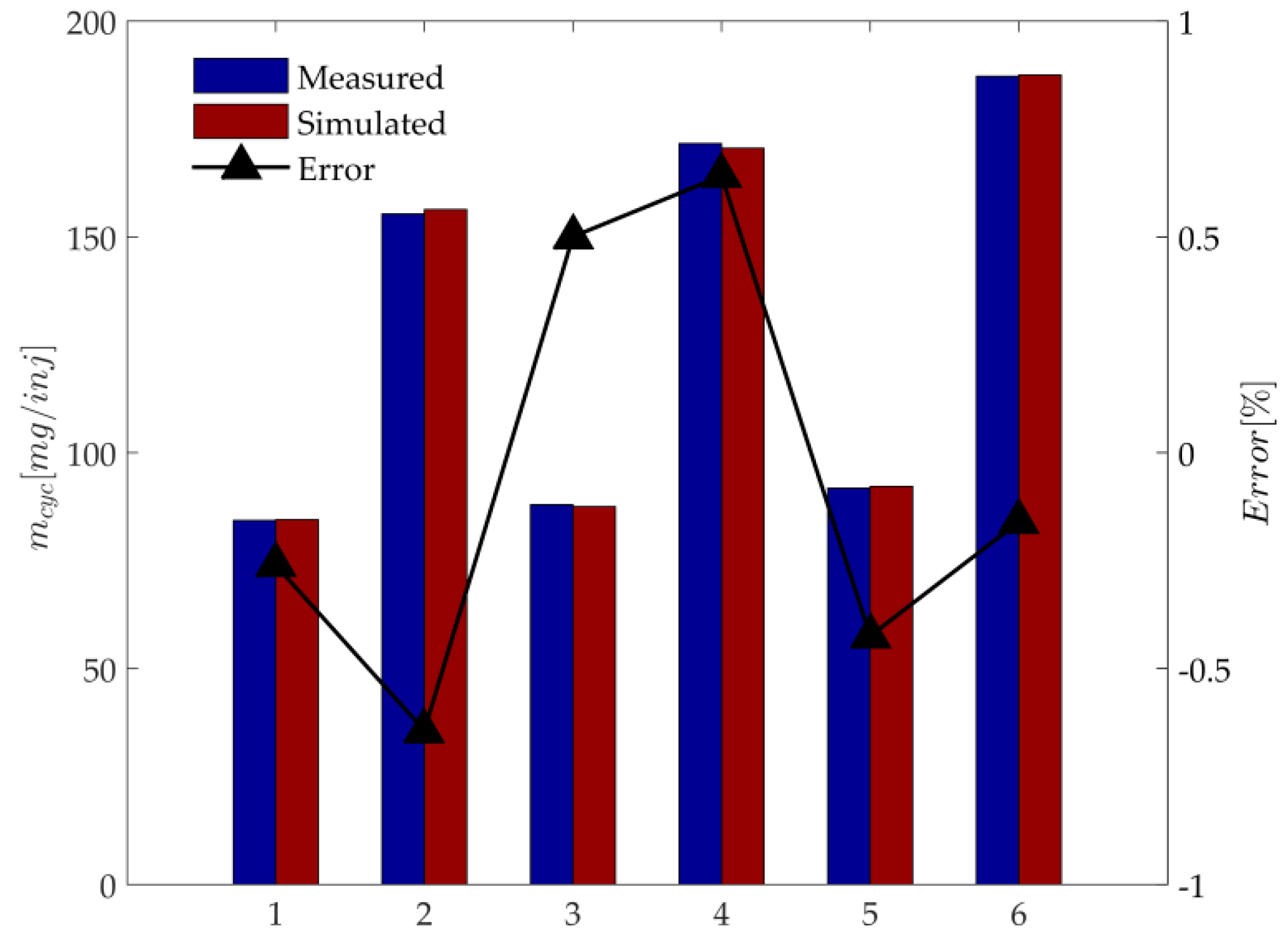
2.2. Injection System
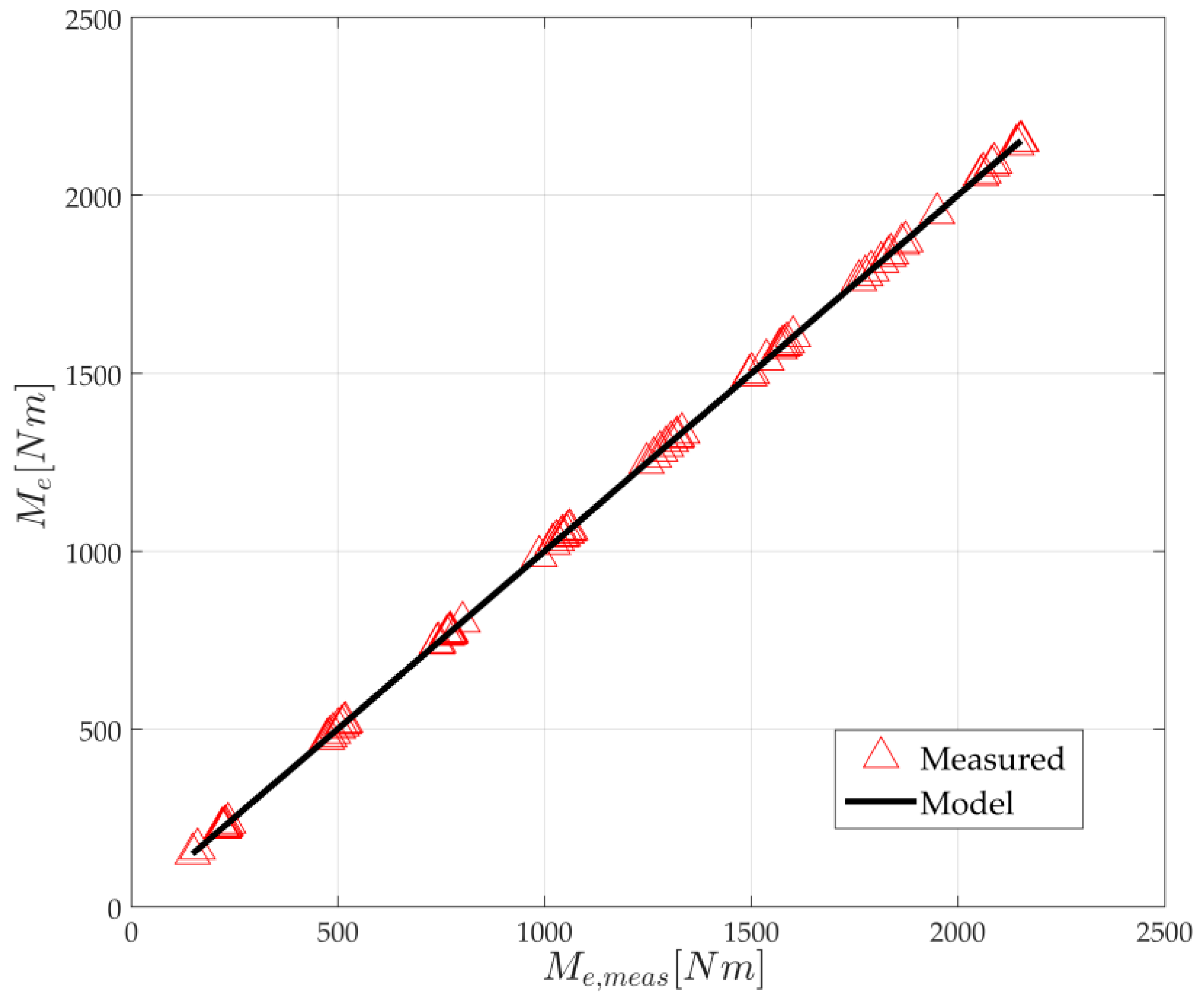
2.3. Torque Generate System
2.3.1. Cylinders
2.3.2. Accessory
2.4. Crankshaft System
2.5. Protection System
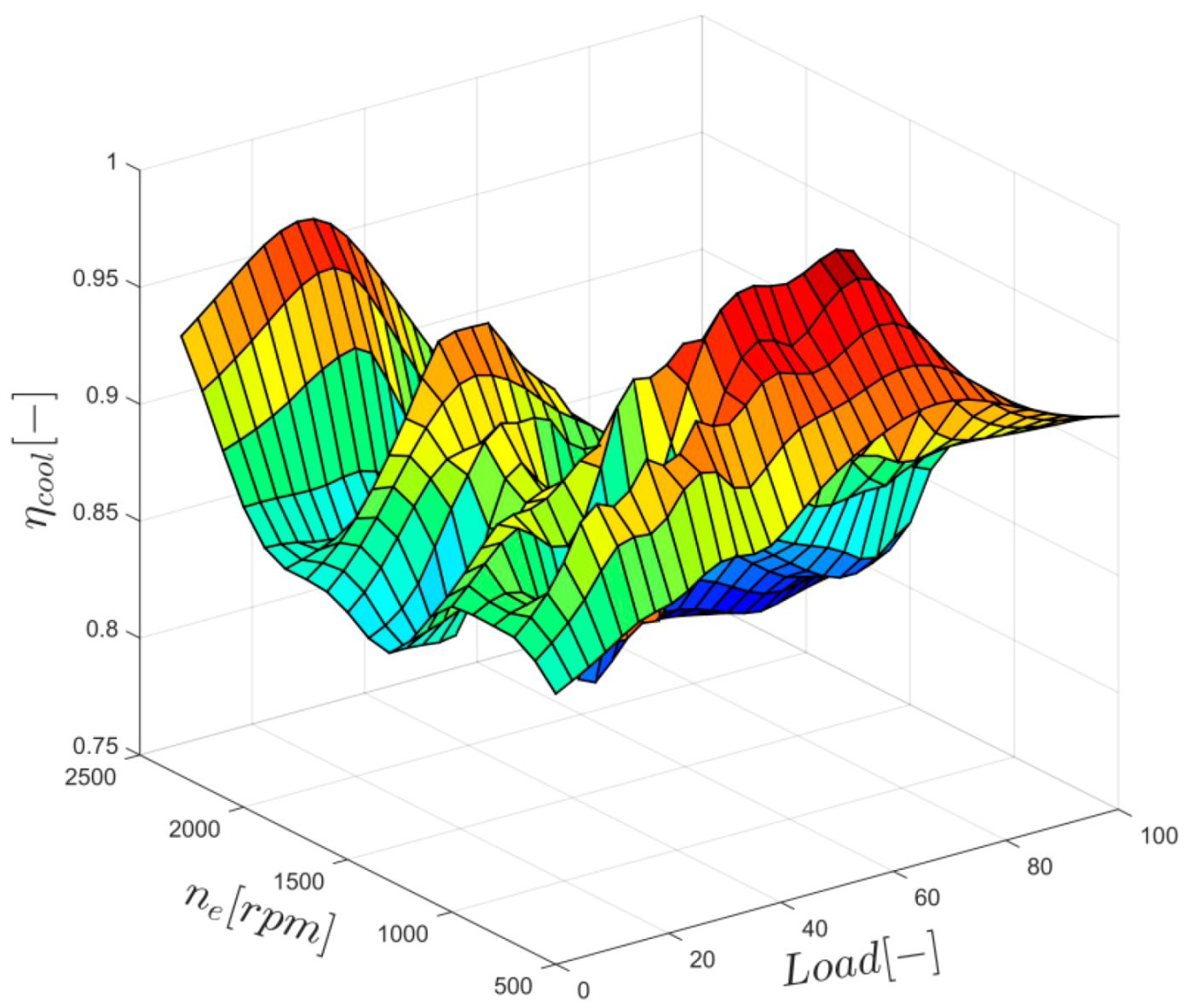
2.5.1. Cooling Block
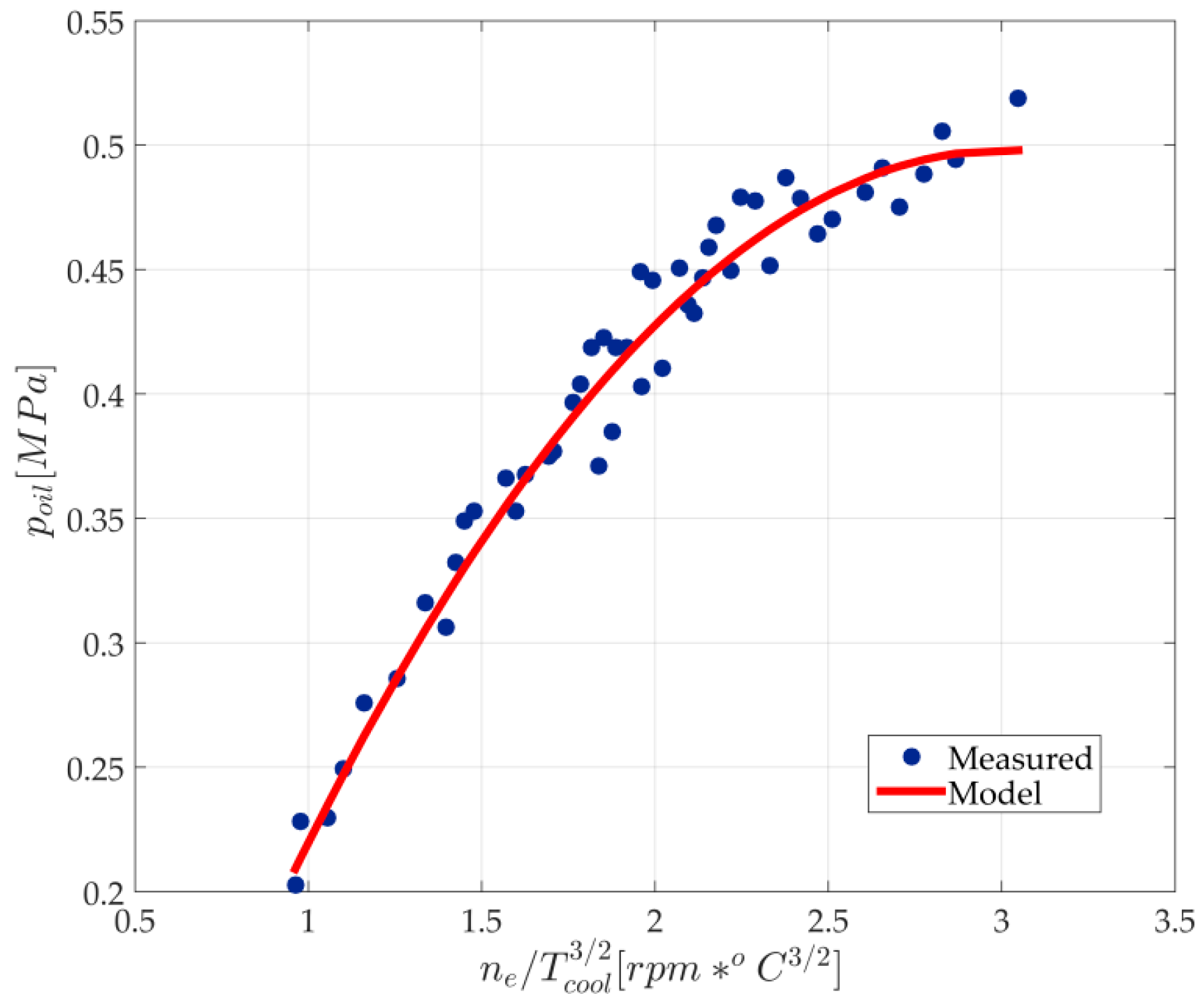
2.5.2. Lubrication Block
3. Model Tuning and Validating
3.1. Tuning
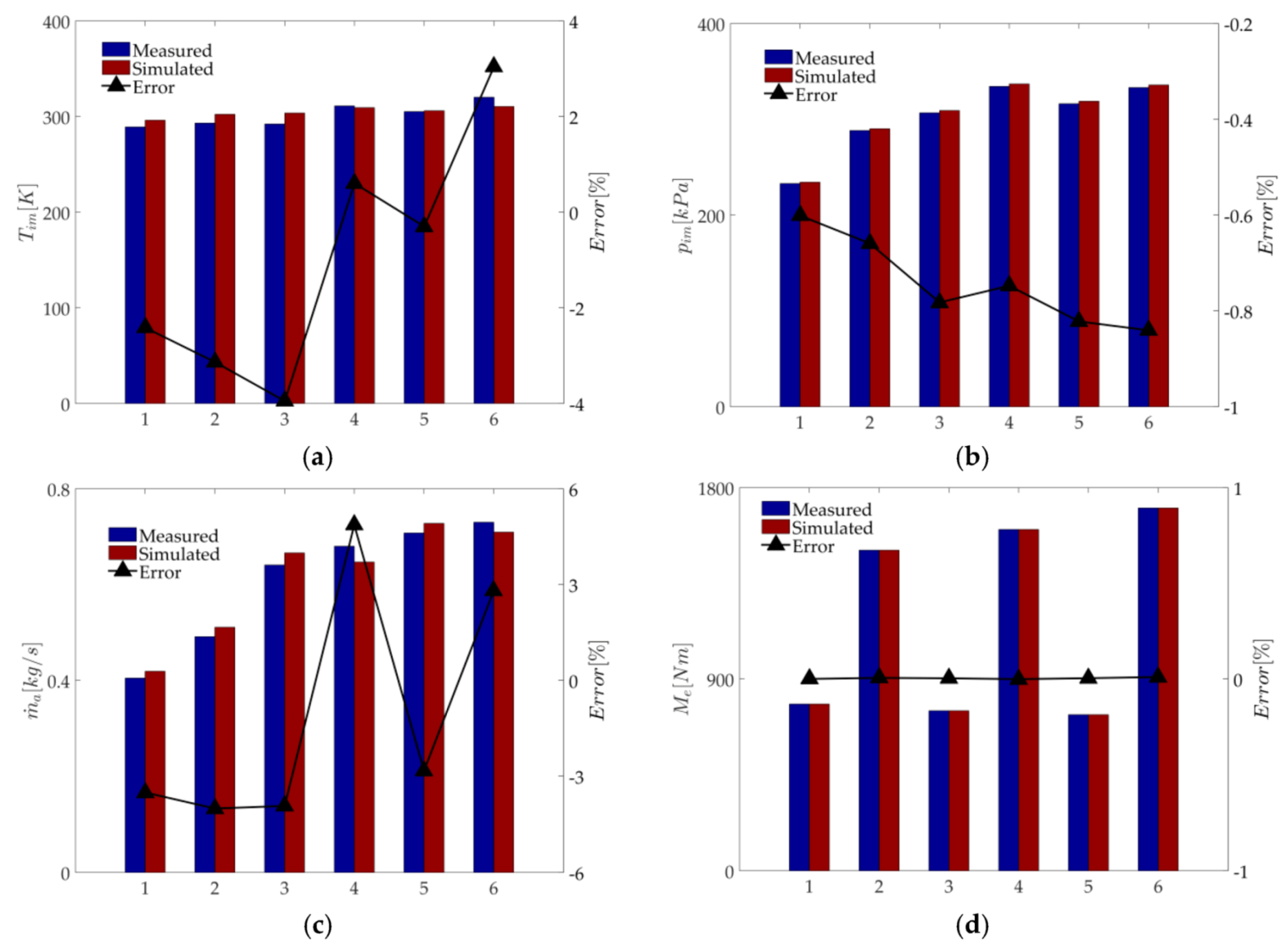
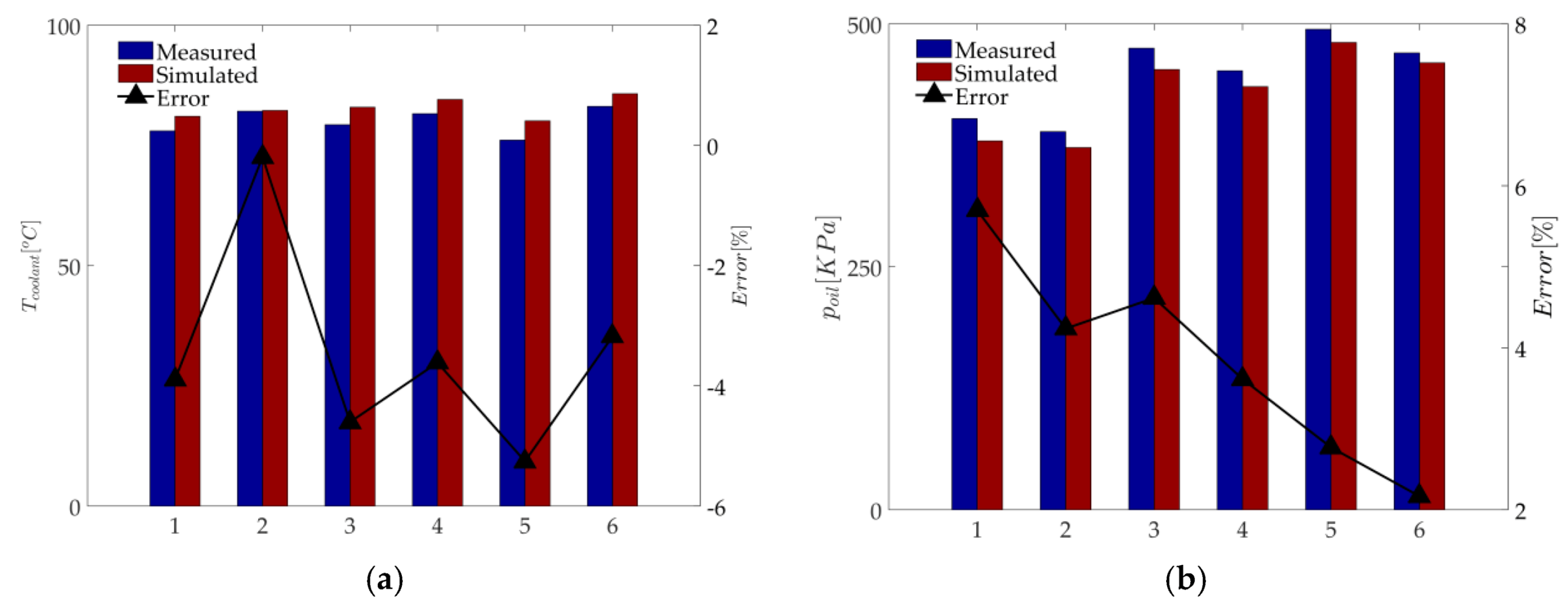
3.2. Validation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cong, G.; Gerasimos, T.; Peilin, Z.; Hui, C. Computational investigation of a large containership propulsion engine operation at slow steaming conditions. Appl. Energy 2014, 130, 370–383. [Google Scholar]
- Jensen, J.P.; Kristensen, A.F.; Serensen, S.C.; Houback, N.; Hendricks, N. Mean Value Modeling of a Small Turbocharged Diesel Engine; Society of Automotive Engineers (SAE) Technical Paper: 910070; SAE: Warrendale, PA, USA, 1991. [Google Scholar]
- Moskwa, J.J.; Hendricks, J.K. Modeling and validation of automotive engines for control algorithm development. Trans. ASME J. Dyn. Syst. Meas. Control 1992, 114, 278–285. [Google Scholar] [CrossRef]
- Guzzella, L.; Onder, C.H. Introduction to Modeling and Control of Internal Combustion Engine Systems, 2rd ed.; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Amir-Mohammad, S.; Amir, H.S. A new approach in improvement of mean value models for spark ignition engines using neural networks. Expert Syst. Appl. 2015, 42, 5192–5218. [Google Scholar]
- Janakiraman, V.M.; Nguyen, X.; Assanis, D. Nonlinear identification of a gasoline HCCI engine using neural networks coupled with principal component analysis. Appl. Soft Comput. 2013, 13, 2375–2389. [Google Scholar] [CrossRef]
- Cay, Y.; Cicek, A.; Kara, F.; Sagiroglu, S. Prediction of engine performance for an alternative fuel using artificial neural network. Appl. Therm. Eng. 2012, 37, 217–225. [Google Scholar] [CrossRef]
- Ruixue, L.; Ying, H.; Gang, L.; He, S. Control-oriented modeling and analysis for turbocharged diesel engine system. Adv. Mech. Eng. 2013, 2, 855–860. [Google Scholar]
- Paolo, C.; Agostino, G.; Nicola, P.; Ugo, C.; Enrico, L.; Annachiara, P. Development and Validation of a “Crank-angle” Model of an Automotive Turbocharged Engine for HiL Applications. Energy Procedia 2014, 45, 839–848. [Google Scholar]
- Fadila, M.; Charbel, S. Combined mean value engine model and crank angle resolved in-cylinder modeling with NOx emissions model for real-time Diesel engine simulations at high engine speed. Energy 2015, 88, 515–527. [Google Scholar]
- Giakoumis, E.G.; Alafouzos, A.I. Study of diesel engine performance and emissions during a Transient Cycle applying an engine mapping-based methodology. Appl. Energy 2010, 87, 1358–1365. [Google Scholar] [CrossRef]
- Benz, M.; Onder, C.H.; Guzzella, L. Engine emission modeling using a mixed physics and regression approach. J. Eng. Gas Turbines Power 2010, 132, 042803. [Google Scholar] [CrossRef]
- Kolmanovsky, I.V.; Stefanopoulou, A.G.; Moraal, P.E.; van Nieuwstadt, M. Issues in modeling and control of intake flow in variable geometry turbocharged engines. In Proceedings of the 18th IFIP Conference on System Modelling and Optimization, Detroit, MI, USA, 22–25 July 1997; Volume 396, pp. 436–445. [Google Scholar]
- Kamyar, N.; Amir, H.S. An extended mean value model (EMVM) for control-oriented modeling of diesel engines transient performance and emissions. Fuel 2015, 154, 275–292. [Google Scholar]
- Paul, D.; Dariusz, C.; Keith, G.; Nick, C.; Yukio, Y.; Yusuke, Y.; Toru, H. On-Engine Validation of Mean Value Models for IC Engine Air-Path Control and Evaluation. IFAC Proc. Vol. 2014, 47, 2987–2993. [Google Scholar]
- Wahlstrom, J.; Eriksson, L. Modelling diesel engines with a variable-geometry turbocharger and exhaust gas recirculation by optimization of model parameters for capturing non-linear system dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2011, 225, 960–986. [Google Scholar] [CrossRef]
- Gupta, V.K.; Zhang, Z.; Sun, Z. Modeling and control of a novel pressure regulation mechanism for common rail fuel injection systems. Appl. Math. Model. 2011, 35, 3473–3483. [Google Scholar] [CrossRef]
- Lino, P.; Maione, B.; Rizzo, A. Nonlinear modelling and control of a common rail injection system for diesel engines. Appl. Math. Model. 2007, 31, 1770–1784. [Google Scholar] [CrossRef]
- Buono, D.; Senatore, A.; Prati, M.V.; Manganelli, M. Analysis of the Cooling Plant of a High Performance Motorbike Engine; Society of Automotive Engineers (SAE) Technical Papers: 2012-01-0354; SAE: Warrendale, PA, USA, 2012. [Google Scholar]
- Piccione, R.; Bova, S. Engine Rapid Shutdown: Experimental Investigation on the Cooling System Transient Response. J. Eng. Gas Turbines Power 2010, 132, 072801. [Google Scholar] [CrossRef]
- Algieri, A.; Amelio, M.; Bova, S.; Morrone, P. Energy Efficiency Analysis of Monolith and Pellet Emission Control Systems in Unidirectional and Reverse-Flow Designs. SAE Int. J. Engines 2010, 2, 684–693. [Google Scholar] [CrossRef]
- Piccione, R.; Vulcano, A.; Bova, S. A Convective Mass Transfer Model for Predicting Vapor Formation within the Cooling System of an Internal Combustion Engine after Shutdown. J. Eng. Gas Turbines Power 2010, 132, 022804. [Google Scholar] [CrossRef]
- Teresa, C.; Sergio, B.; Mario, B. A Model Predictive Controller for the Cooling System of Internal Combustion Engines. Energy Procedia 2016, 101, 582–589. [Google Scholar]
- Pizzonia, F.; Castiglione, T.; Bova, S. A Robust Model Predictive Control for Efficient thermal management of Internal Combustion Engines. Appl. Energy 2016, 169, 555–566. [Google Scholar] [CrossRef]
- Castiglione, T.; Pizzonia, F.; Bova, S. A Novel Cooling System Control Strategy for Internal Combustion Engines. SAE Int. J. Engines 2016, 9, 294–302. [Google Scholar] [CrossRef]
- Mohammad, H.S.; Thomas, H.M.; John, R.W.; Darren, M.D. A Smart Multiple-Loop Automotive Cooling System—Model, Control, and Experimental Study. IEEE/ASME Trans. Mechatron. 2010, 15, 117–124. [Google Scholar]
- Chun, S.M. Network analysis of an engine lubrication system. Tribol. Int. 2003, 36, 609–617. [Google Scholar] [CrossRef]
- Hassan, M.N.; Rafic, Y.; Hassan, S.; Mustapha, O. Modeling with Fault Integration of the Cooling and the Lubricating Systems in Marine Diesel Engine: Experimental Validation. Int. Fed. Autom. Control 2016, 49, 570–575. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Value |
|---|---|
| Displacement | 15.8 L |
| Bore × Stroke | 132 mm × 145 mm |
| Number of Strokes | 4 |
| Number of Cylinder | 8 |
| Compression ratio | 17.5 |
| Max enging speed | 2100 rpm |
| Fuel supply system | Electronic Unit Pump |
| Measured | Variable |
|---|---|
| Ambient temperature | Ambient pressure |
| Compressor inlet temperature | Compressor inlet pressure |
| Compressor outlet temperature | Compressor outlet pressure |
| Intake manifold temperature | Intake manifold pressure |
| Exhaust manifold temperature | Exhaust manifold pressure |
| Fuel delivery per cycle per cylinder | Injection duration |
| Engine speed | Engine effective torque |
| Coolant temperature | Oil pressure |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, J.; Su, T.; Guan, Z.; Chu, Q.; Meng, C.; Jia, L.; Wang, J.; Zhang, Y. Modeling and Validation of a Diesel Engine with Turbocharger for Hardware-in-the-Loop Applications. Energies 2017, 10, 685. https://doi.org/10.3390/en10050685
Yin J, Su T, Guan Z, Chu Q, Meng C, Jia L, Wang J, Zhang Y. Modeling and Validation of a Diesel Engine with Turbocharger for Hardware-in-the-Loop Applications. Energies. 2017; 10(5):685. https://doi.org/10.3390/en10050685
Chicago/Turabian StyleYin, Jinguan, Tiexiong Su, Zhuowei Guan, Quanhong Chu, Changjiang Meng, Li Jia, Jun Wang, and Yangang Zhang. 2017. "Modeling and Validation of a Diesel Engine with Turbocharger for Hardware-in-the-Loop Applications" Energies 10, no. 5: 685. https://doi.org/10.3390/en10050685
APA StyleYin, J., Su, T., Guan, Z., Chu, Q., Meng, C., Jia, L., Wang, J., & Zhang, Y. (2017). Modeling and Validation of a Diesel Engine with Turbocharger for Hardware-in-the-Loop Applications. Energies, 10(5), 685. https://doi.org/10.3390/en10050685