
Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration



Abstract
:1. Introduction
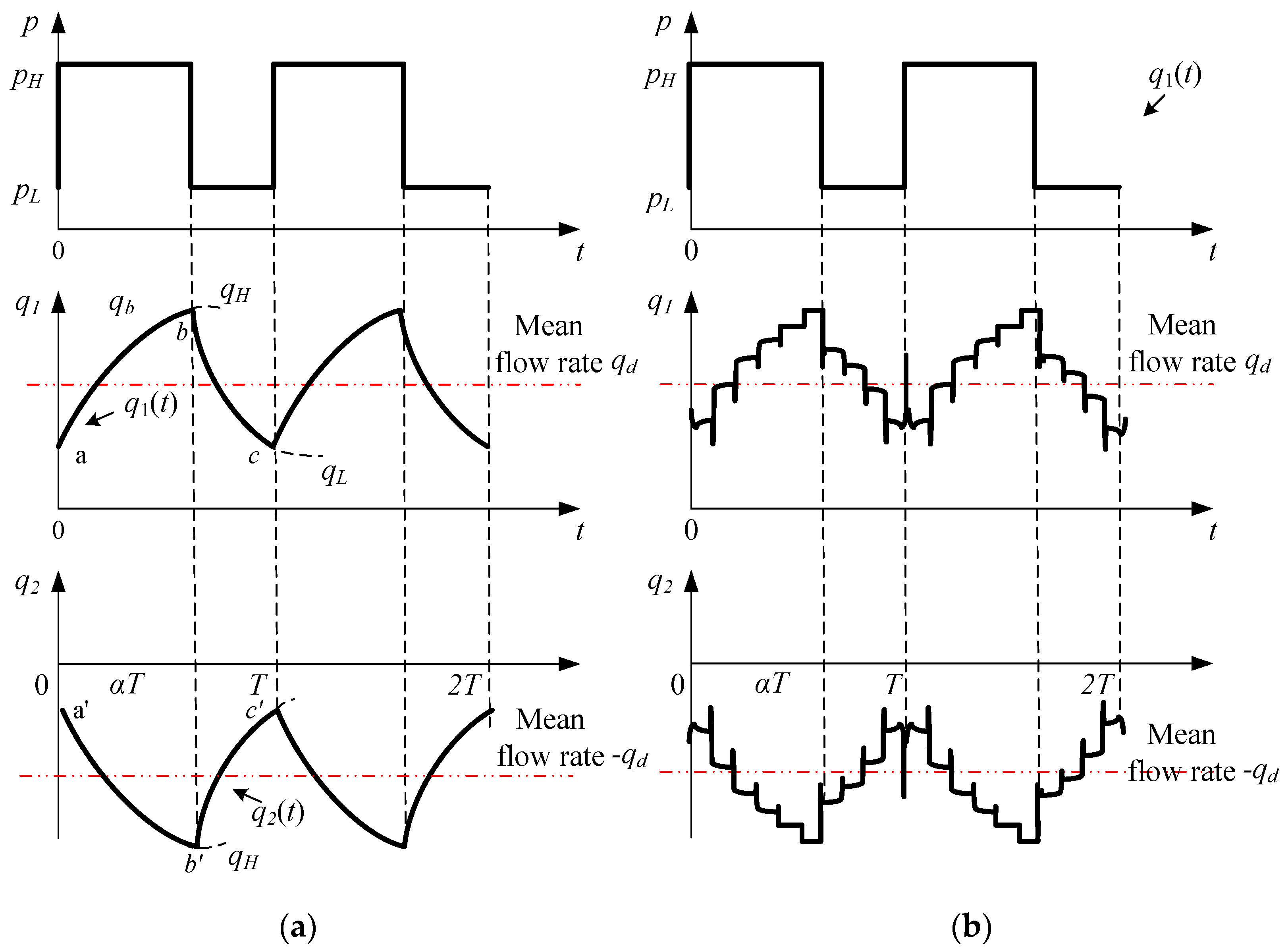
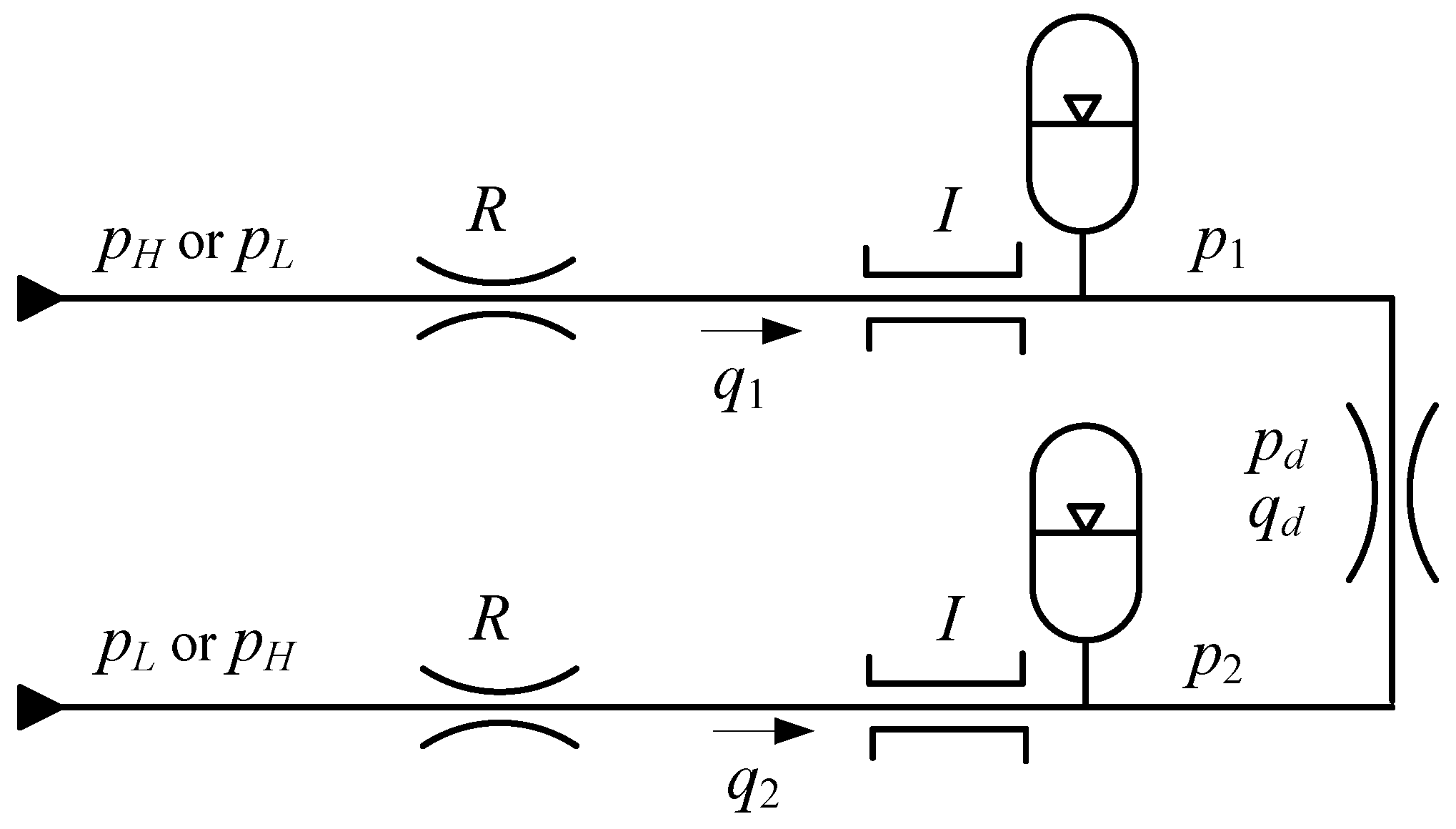
2. Lumped Parameter Model
3. Distributed Parameter Model
4. Experimental Validation
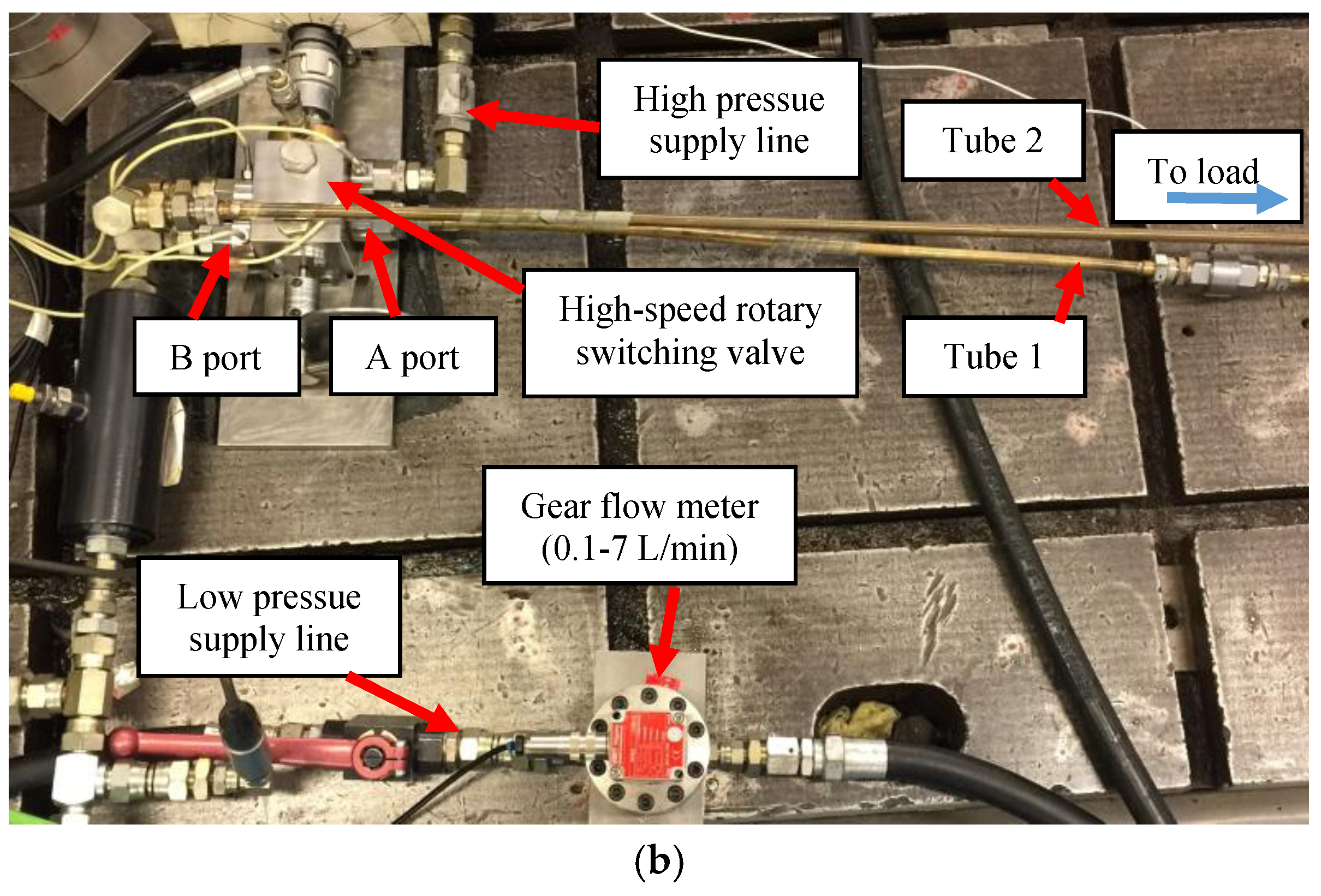
4.1. High-Speed Rotary Switching Valve
4.2. Experimental Rig
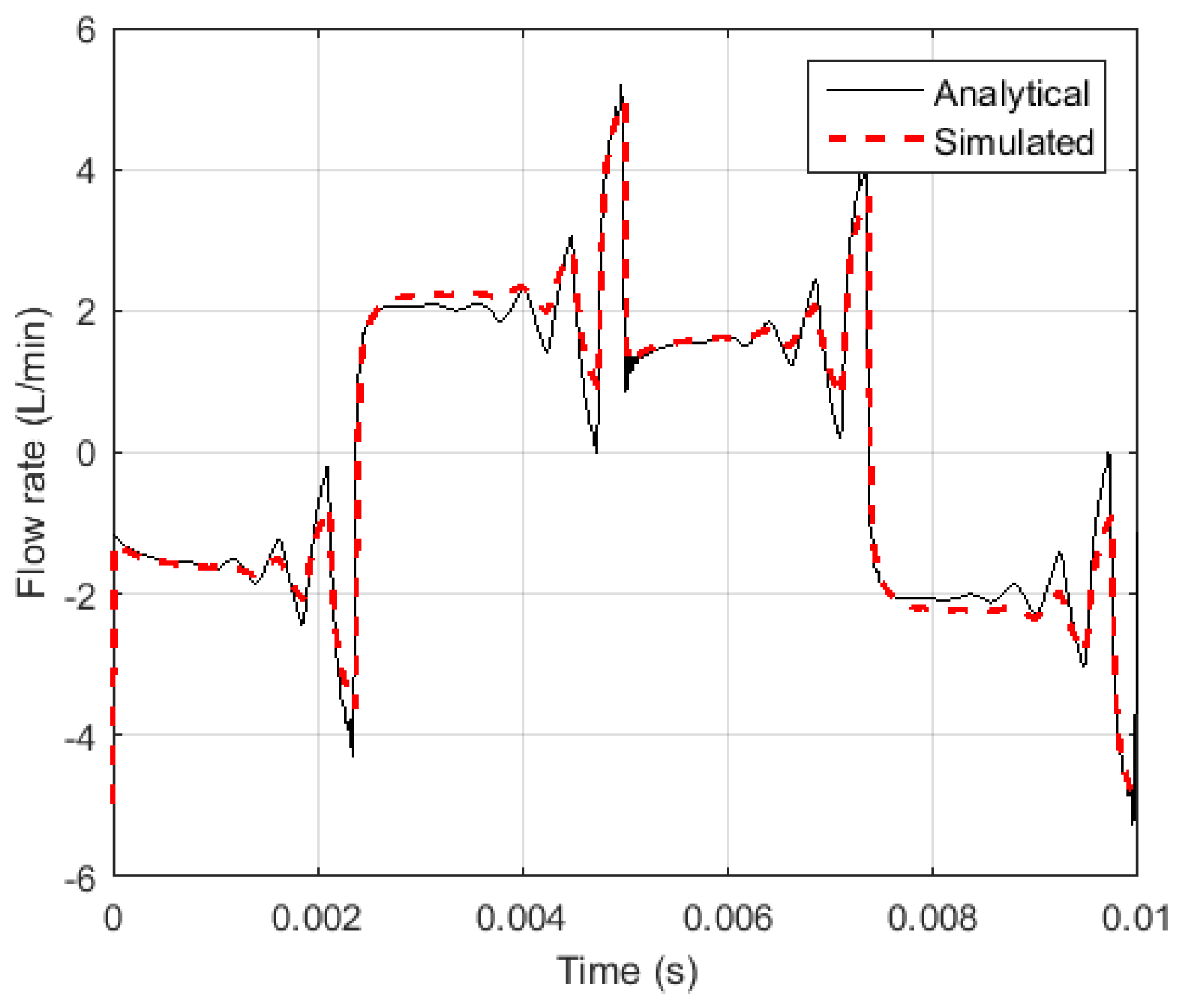
4.3. Upstream Pressure and Flow Rate at A Port
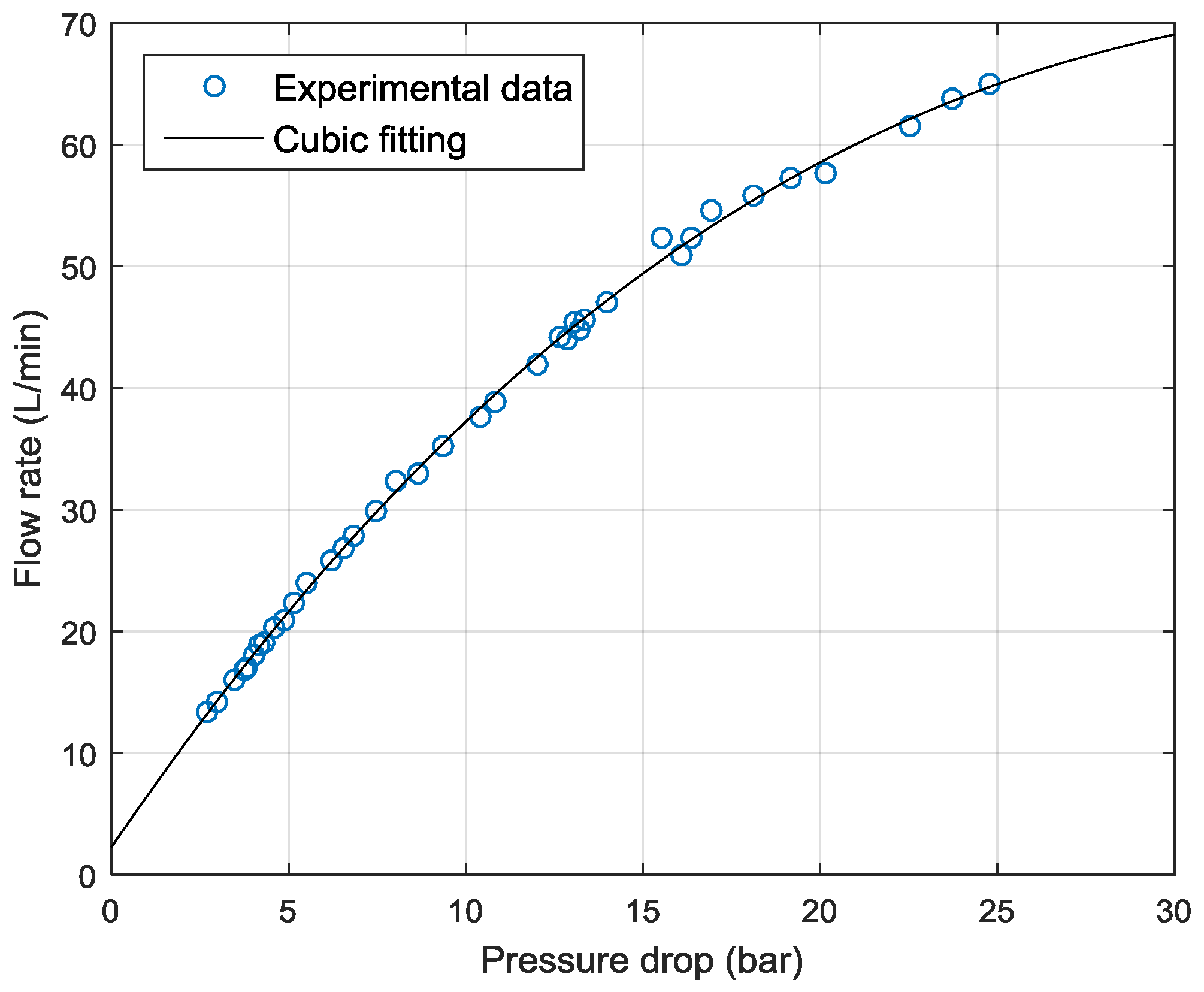
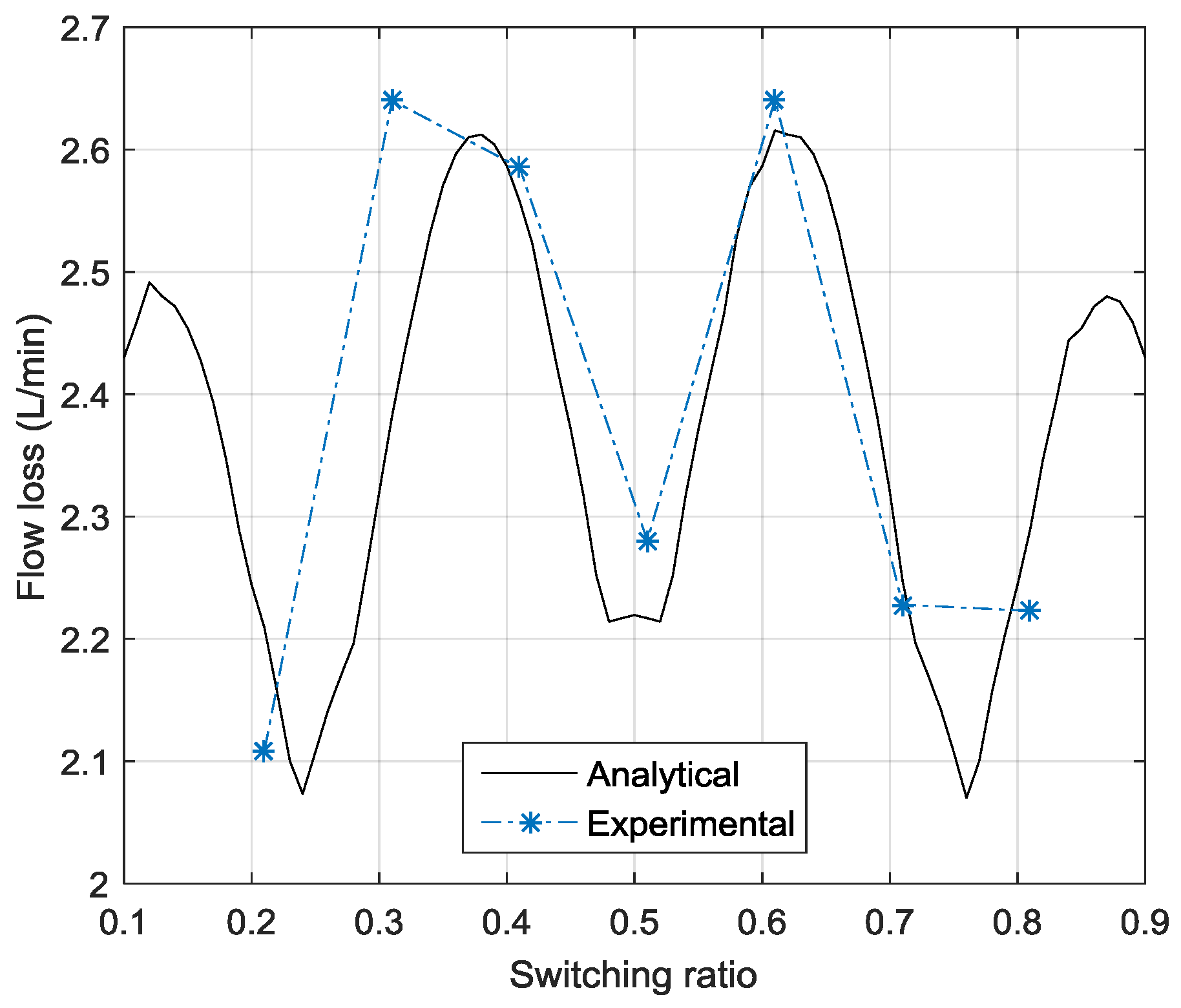
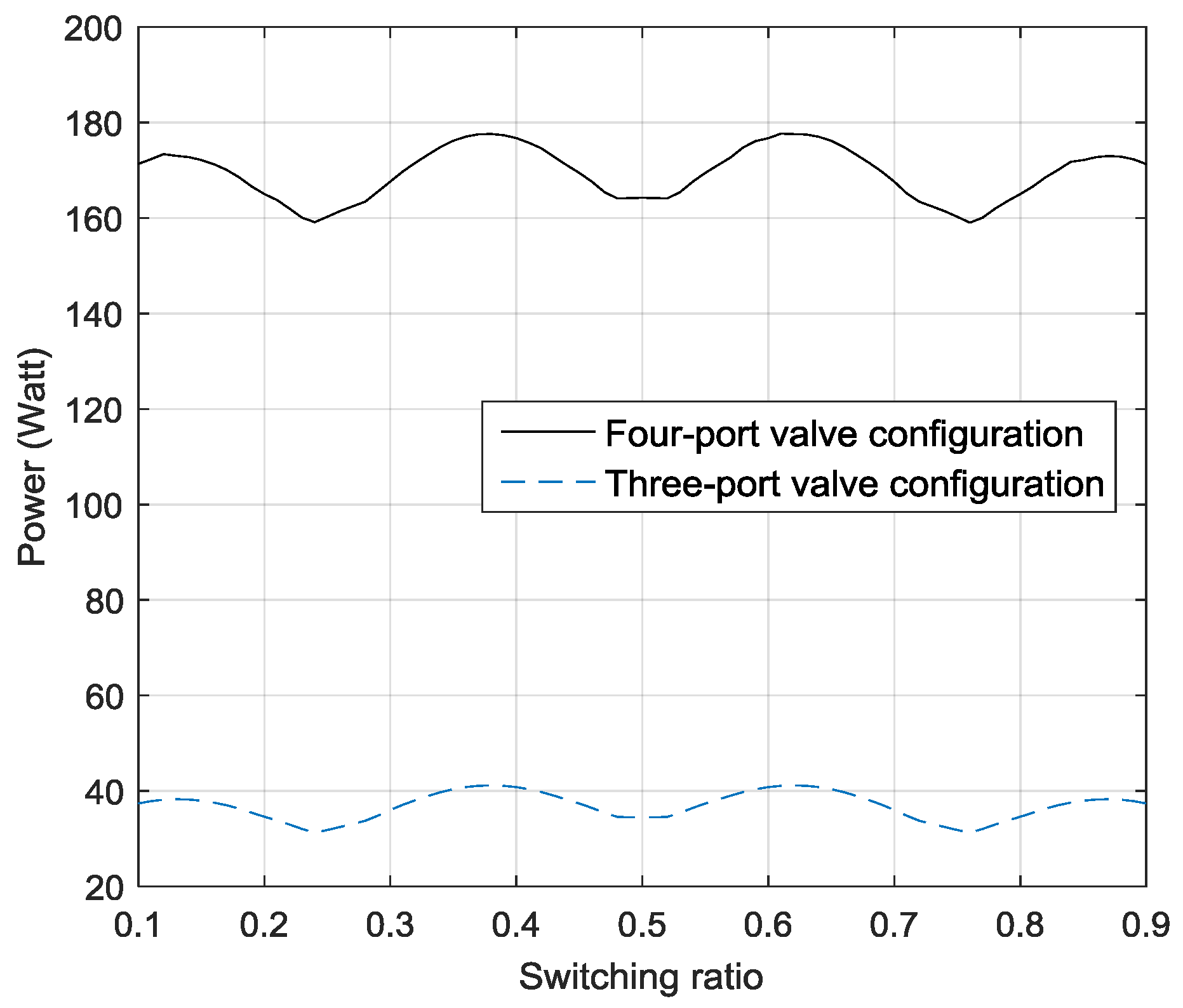
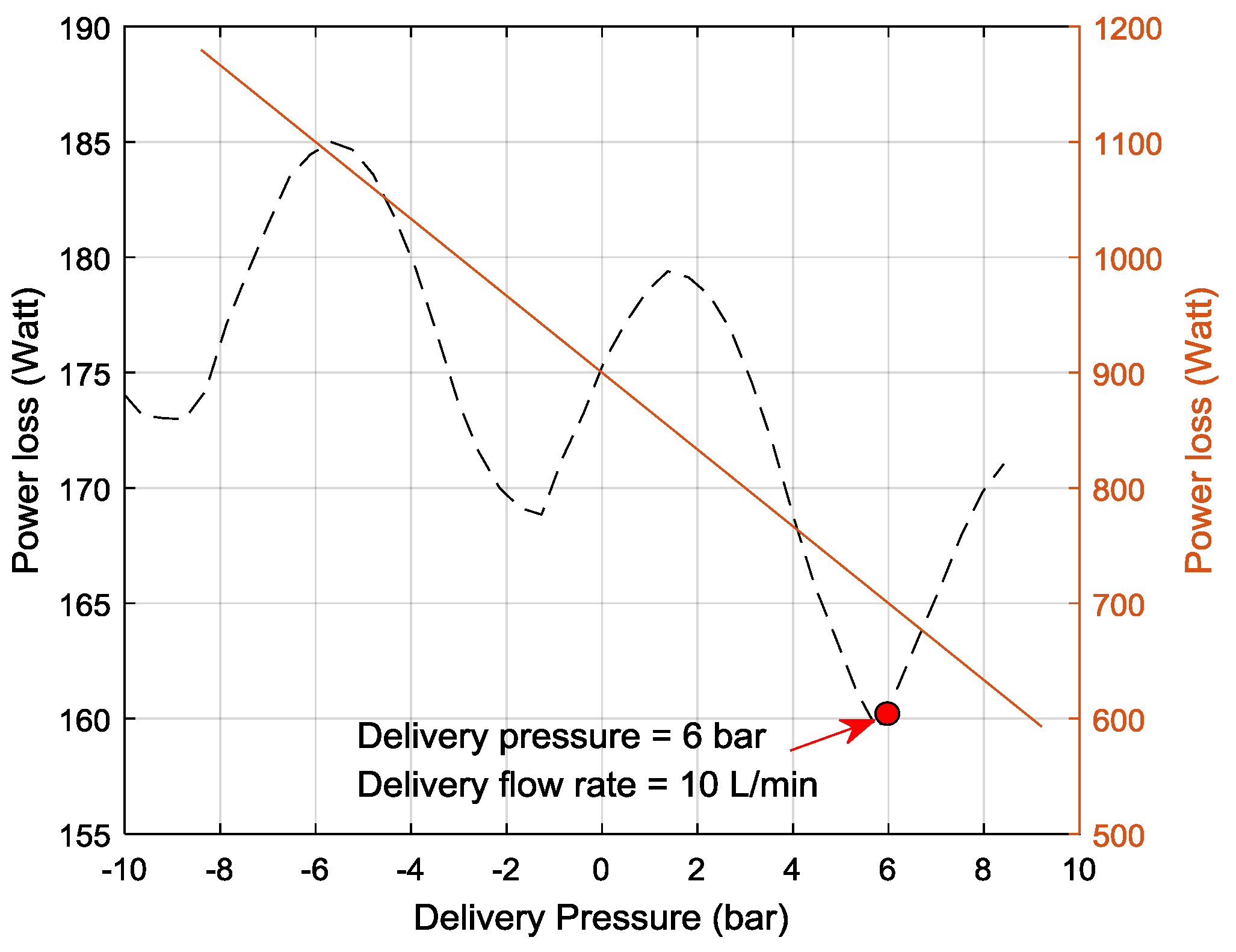
4.4. Flow Loss and System Efficiency
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Brown, F.T. Switched reactance hydraulics: A new way to control fluid power. In Proceedings of the National Conference on Fluid Power, Chicago, IL, USA, 2–5 March 1987; pp. 25–34. [Google Scholar]
- Brown, F.T. A hydraulic rotary switched inertance servo-transformer. J. Dyn. Syst. Meas. Control 1988, 110, 144–150. [Google Scholar] [CrossRef]
- Johnston, D.N. A switched inertance device for efficient control of pressure and flow. In Proceedings of the Bath/ASME Fluid Power and Motion Control Symposium, Hollywood, CA, USA, 12–14 October 2009. [Google Scholar]
- Pan, M.; Johnston, D.N.; Plummer, A.; Kudzma, S.; Hillis, A. Theoretical and experimental studies of a switched inertance hydraulic system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 12–25. [Google Scholar] [CrossRef]
- Pan, M.; Johnston, D.N.; Plummer, A.; Kudzma, S.; Hillis, A. Theoretical and experimental studies of a switched inertance hydraulic system including switching transition dynamics, non-linearity and leakage. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 802–815. [Google Scholar] [CrossRef]
- Pan, M.; Johnston, D.N.; Robertson, J.; Plummer, A.; Hillis, A.; Yang, H. Experimental investigation of a switched inertance hydraulic system with a high-speed rotary valve. Trans. ASME J. Dyn. Syst. Meas. Control 2015, 137, 121003. [Google Scholar] [CrossRef]
- Kogler, H.; Scheidl, R. Energy efficient linear drive axis using a hydraulic switching converter. J. Dyn. Syst. Meas. Control 2016, 138, 091010. [Google Scholar] [CrossRef]
- Scheidl, R.; Manhartsgruber, B.; Kogler, H.; Winkler, B.; Mairhofer, M. The hydraulic buck converter–concept and experimental results. In Proceedings of the Sixth International Conference on Fluid Power, Dresden, Germany, 31 March–2 April 2008. [Google Scholar]
- Kogler, H.; Scheidl, R. Two basic concepts of hydraulic switching converters. In Proceedings of the First Workshop on Digital Fluid Power, Tampere, Finland, 3 October 2008. [Google Scholar]
- Kogler, H.; Scheidl, R. The hydraulic buck converter exploiting the load capacitance. In Proceedings of the 8th International Fluid Power Conference (8. IFK), Dresden, Germany, 26–28 March 2012; Volume 2, pp. 297–309. [Google Scholar]
- Kogler, H.; Scheidl, R.; Ehrentraut, M.; Guglielmino, E.; Semini, C.; Caldwell, D.G. A Compact Hydraulic Switching Converter for Robotic Applications; Fluid Power and Motion Control: Bath, UK, 2010; pp. 55–66. [Google Scholar]
- Scheidl, R.; Garstenauer, M.; Manhartsgruber, B. Switching Type Control of Hydraulic Drives—A Promising Perspective for Advanced Actuation in Agricultural Machinery; SAE Technical Paper No. 2000-01-2559; SAE International: Warrendale, PA, USA, 2009. [Google Scholar]
- Scheidl, R.; Manhartsgruber, B.; Kogler, H. Mixed time-frequency domain simulation of a hydraulic inductance pipe with a check valve. Proc. Inst. Mech. Eng. Part C 2011, 225, 2413–2421. [Google Scholar] [CrossRef]
- Wang, F.; Gu, L.; Chen, Y. A continuously variable hydraulic pressure converter based on high-speed on–off valves. Mechatronics 2011, 21, 1298–1308. [Google Scholar] [CrossRef]
- Van de Ven, J.D. On fluid compressibility in switch-mode hydraulic circuits—Part I: Modeling and analysis. ASME J. Dyn. Syst. Meas. Control 2013, 135, 021013. [Google Scholar] [CrossRef]
- Rannow, M.B.; Li, P.Y. Soft switching approach to reducing transition losses in an on/off hydraulic valve. J. Dyn. Syst. Meas. Control 2012, 134, 064501. [Google Scholar] [CrossRef]
- Pan, M.; Johnston, N.; Hillis, A. Active control of pressure pulsation in a switched inertance hydraulic system. Proc. Inst. Mech. Eng. Part I Syst. Control Eng. 2013, 227, 610–620. [Google Scholar] [CrossRef]
- Pan, M. Adaptive control of a piezoelectric valve for fluid-borne noise reduction in a hydraulic buck converter. Trans. ASME J. Dyn. Syst. Meas. Control 2017, 139. [Google Scholar] [CrossRef]
- Johnston, D.N.; Pan, M.; Plummer, A.; Hillis, A.; Yang, H. Theoretical studies of a switched inertance hydraulic system in a four-port valve configuration. In Proceedings of the Seventh Workshop on Digital Fluid Power, Linz, Austria, 26–27 February 2015. [Google Scholar]
- Akers, A.; Gassman, M.; Smith, R. Hydraulic Power System Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Johnston, D.N. Measurement and Prediction of the Fluid Borne Noise Characteristics of Hydraulic Components and Systems. Ph.D. Thesis, University of Bath, Bath, UK, 1987. [Google Scholar]
- Stecki, J.S.; Davis, D. Fluid transmission lines—Distributed parameter models Part 1: A review of the state of the art. Proc. Inst. Mech. Eng. Part A J. Power Energy 1986, 200, 215–228. [Google Scholar] [CrossRef]
- Wang, P.; Kudzma, S.; Johnston, D.N.; Plummer, A.; Hillis, A.J. The influence of wave effects on digital switching valve performance. In Proceedings of the Fourth Workshop on Digital Fluid Power, Linz, Austria, 21–22 September 2011. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Length of tube 1 l1 | 162 cm |
| Length of tube 2 l2 | 160 cm |
| Internal diameter of tube d | 7 mm |
| Estimated speed of sound c | 1350 m/s |
| High supply pressure pH | 32 bar |
| Low supply pressure pL | 10 bar |
| Switching frequency f | 100 Hz |
| Switching ratio α | 0.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, M.; Plummer, A.; El Agha, A. Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration. Energies 2017, 10, 780. https://doi.org/10.3390/en10060780
Pan M, Plummer A, El Agha A. Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration. Energies. 2017; 10(6):780. https://doi.org/10.3390/en10060780
Chicago/Turabian StylePan, Min, Andrew Plummer, and Abdullah El Agha. 2017. "Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration" Energies 10, no. 6: 780. https://doi.org/10.3390/en10060780
APA StylePan, M., Plummer, A., & El Agha, A. (2017). Theoretical and Experimental Studies of a Switched Inertance Hydraulic System in a Four-Port High-Speed Switching Valve Configuration. Energies, 10(6), 780. https://doi.org/10.3390/en10060780