
A Novel Decentralized Economic Operation in Islanded AC Microgrids





Abstract
:1. Introduction
- (1)
- Frequency information is used as a carrier to achieve decentralized economic operation, thus communications are not needed.
- (2)
- Synchronous operation within DGs capacity limitations is fully satisfied.
- (3)
- Flexible operation with plug-and-play of DGs is retained.
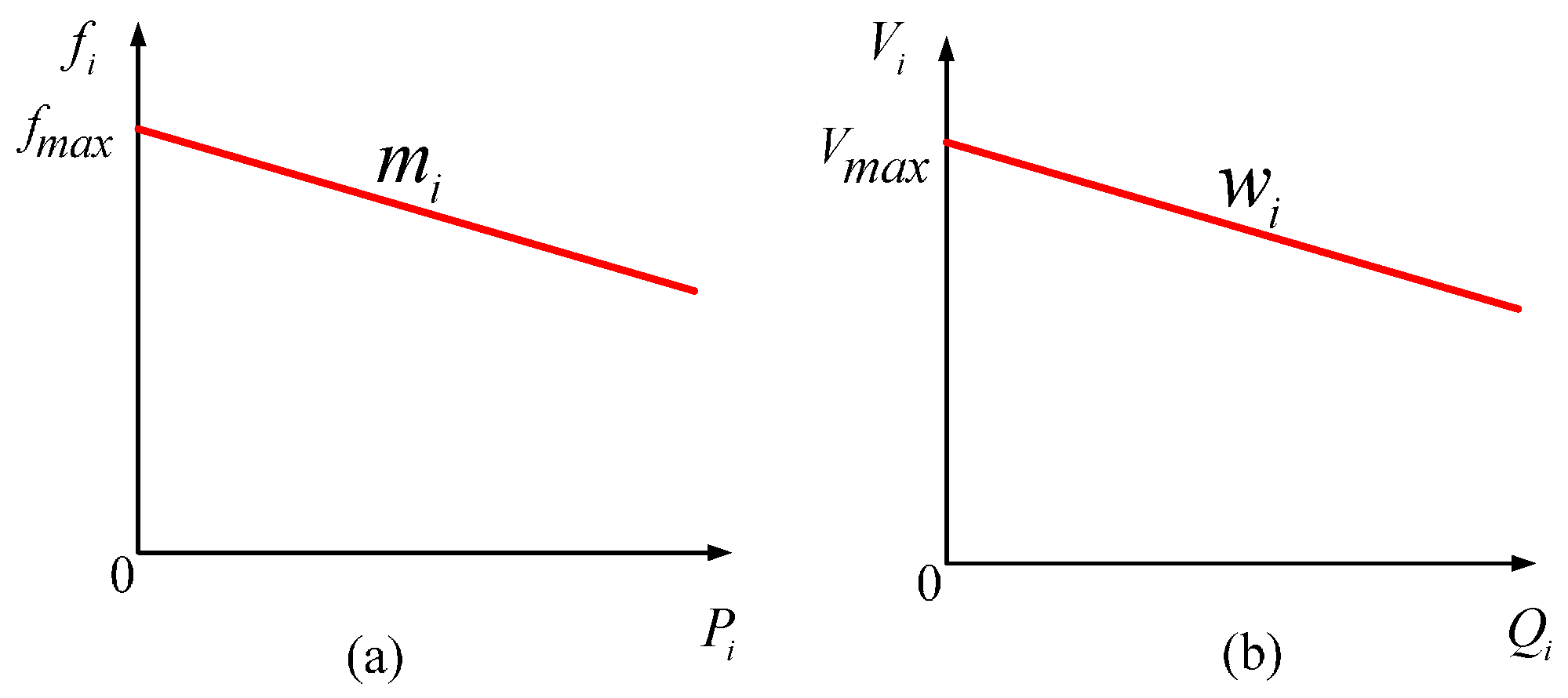
2. Traditional Droop Scheme
3. Problem Formulation
3.1. Sufficient Conditions for the Economic Dispatch Problem
3.2. Necessary Conditions for the Economic Dispatch Problem
4. Proposed P-f Scheme for Decentralized Economic Operation
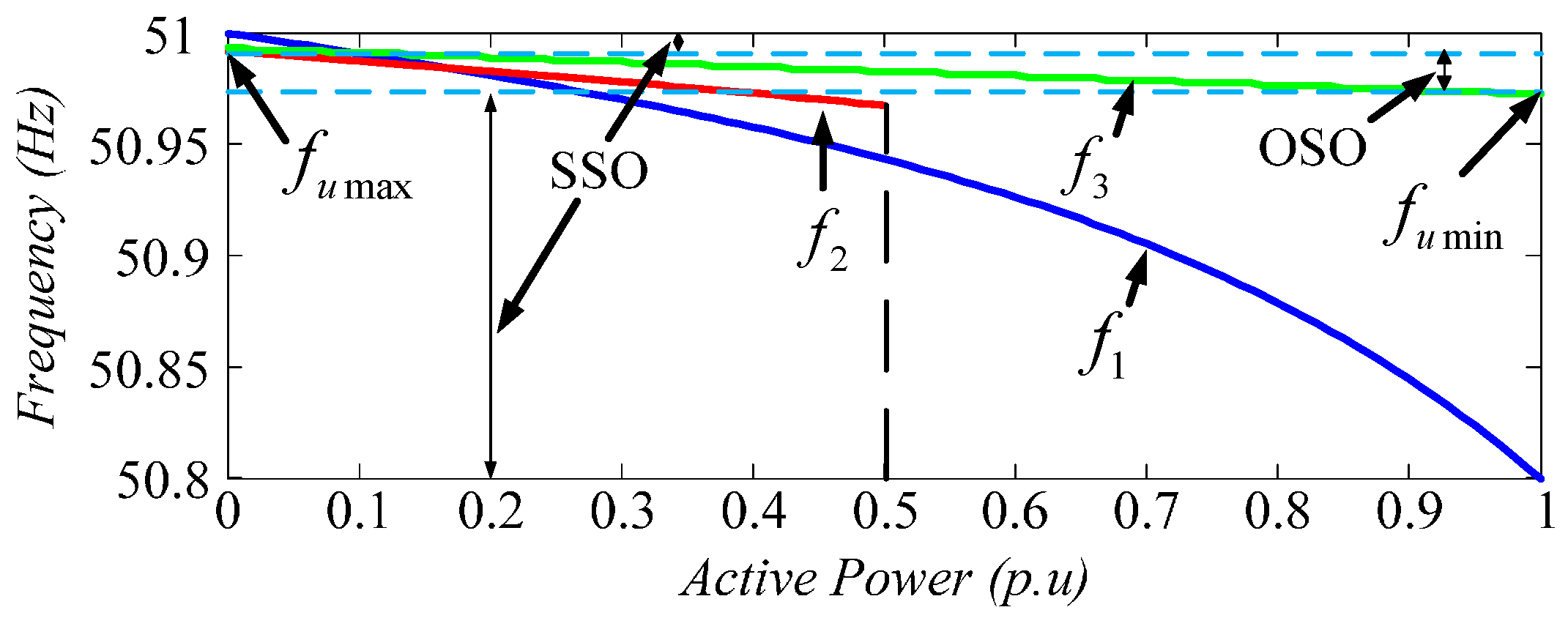
4.1. Optimal Synchronous Operation
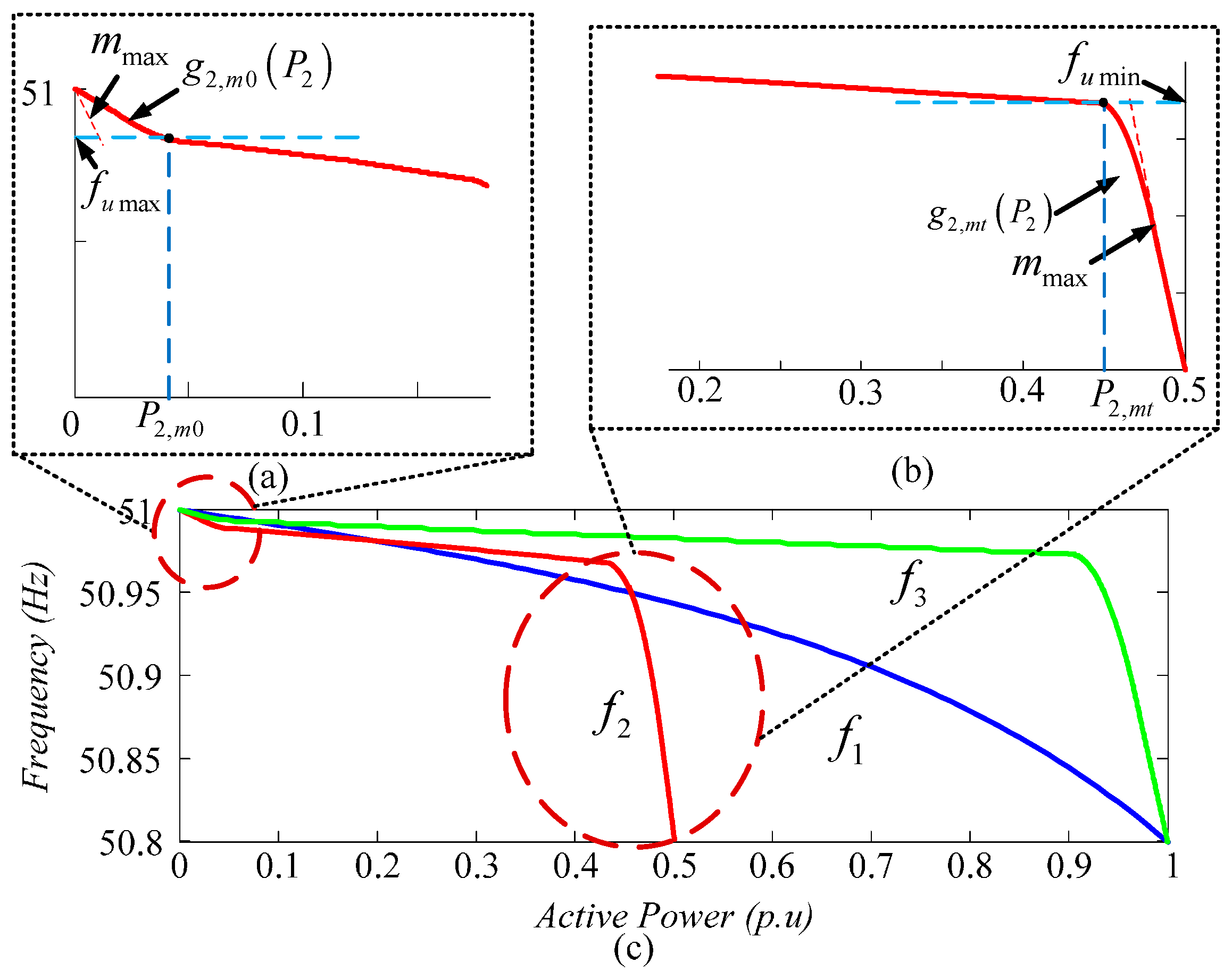
4.2. Suboptimal Synchronous Operation Considering Distributed Generators Capacity Limitations and Microgrid Stability
- (1)
- shall be smooth and continuous in the range of [, ], especially function should be continues at the connecting points and .
- (2)
- In order to obtain synchronous operation within DGs’ capacity limitations, should start from (Pi,min, fmax) and end at (Pi,max, fmin), namely gi,m0(Pi = Pi,max) = fmax, gi,mt(Pi = Pi,max) = fmin.
- (3)
- The droop coefficients should satisfy the stability constraints of the MG, i.e., . is the permissible maximum droop coefficient determined by the technical conditions of DGs and also by the requirement of a broad stability domain of the MG.
5. Small Signal Analysis
5.1. Small Signal Analysis for the Necessity of Modifications
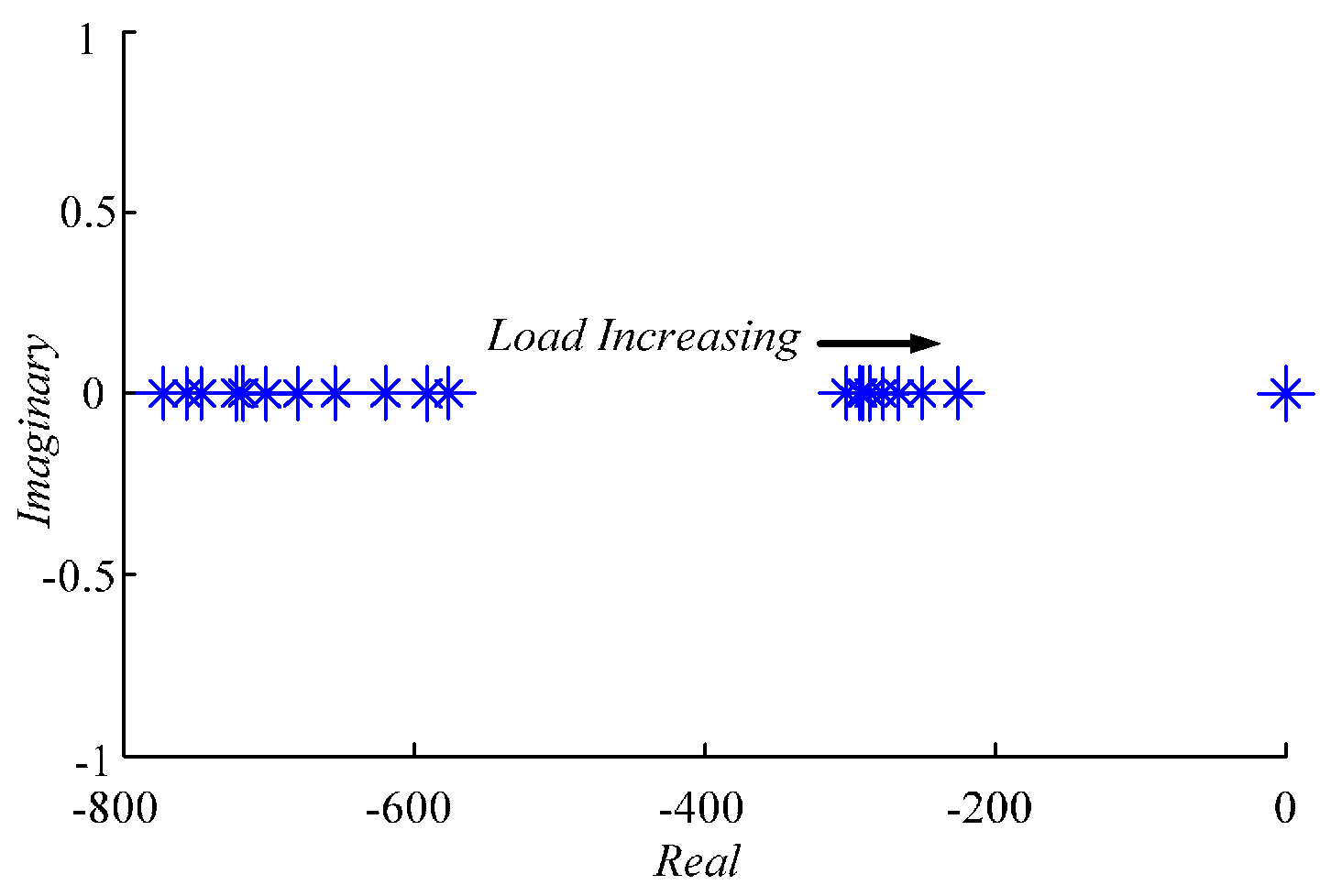
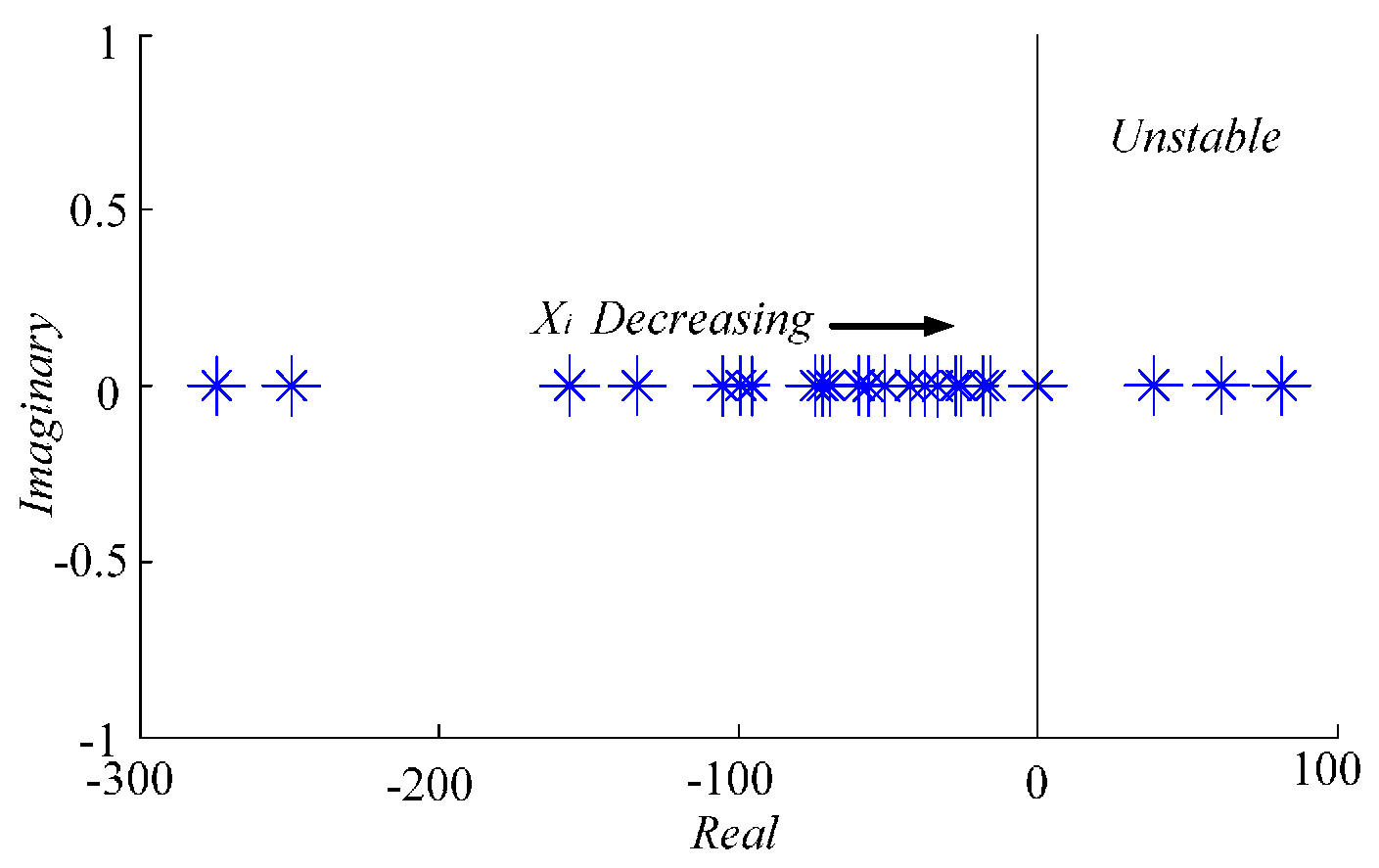
5.2. Root-Locus Analysis for the Proposed Scheme in the Considered Microgrid
6. Simulation Validations
6.1. Case1: Necessity for the Modifications When Considering DGs Capacity Limitations
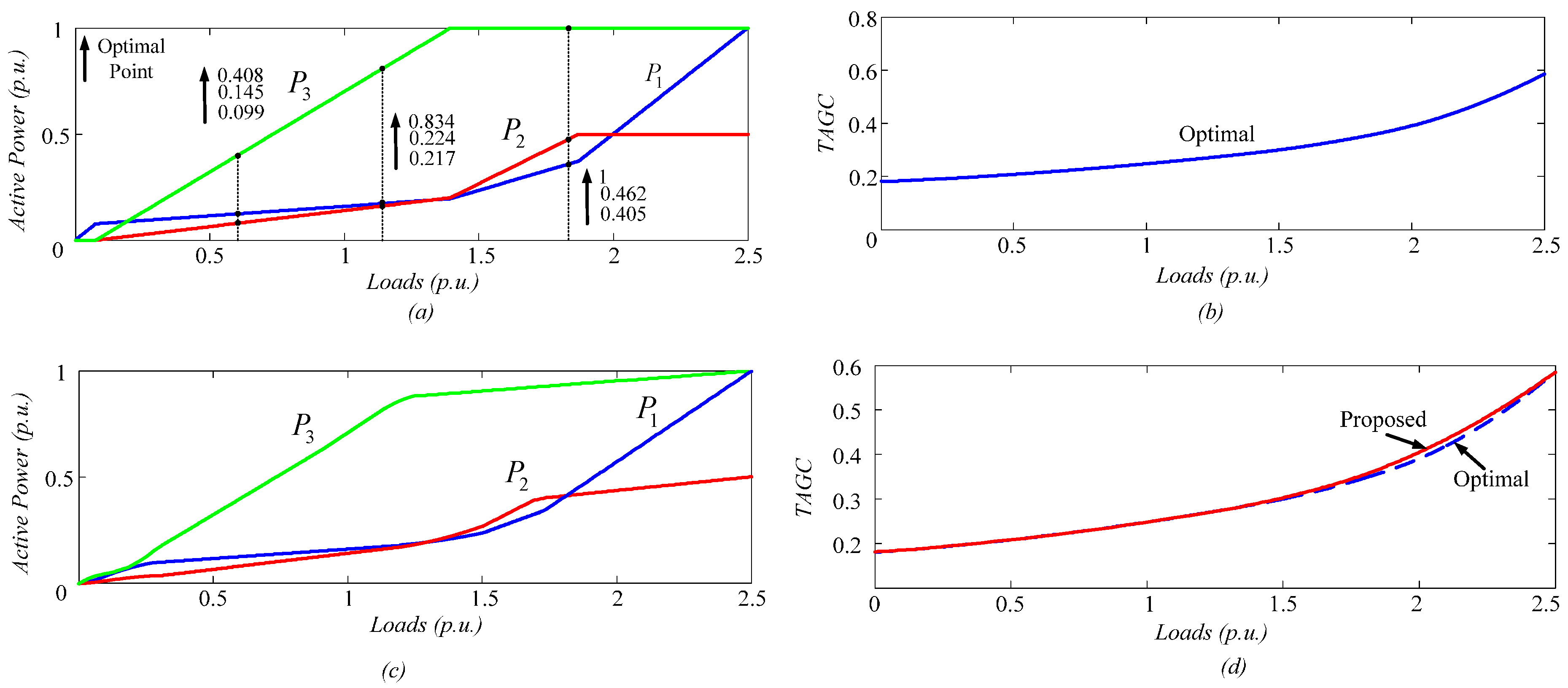
6.2. Case 2: Economy Comparisons between the Proposed P-f Scheme and the Interior Point Method
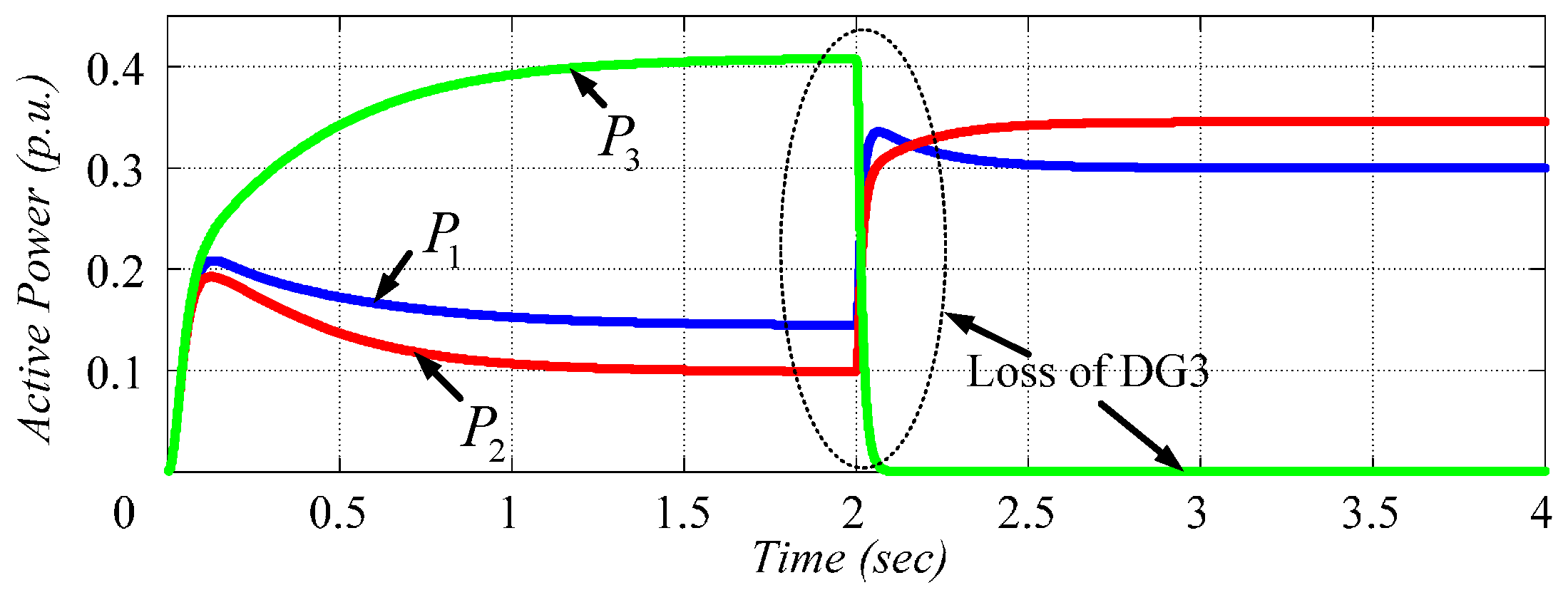
6.3. Case 3: Performance of the Proposed P-f Scheme
6.4. Case 4: Plug and Play Capability of the Proposed P-f Scheme
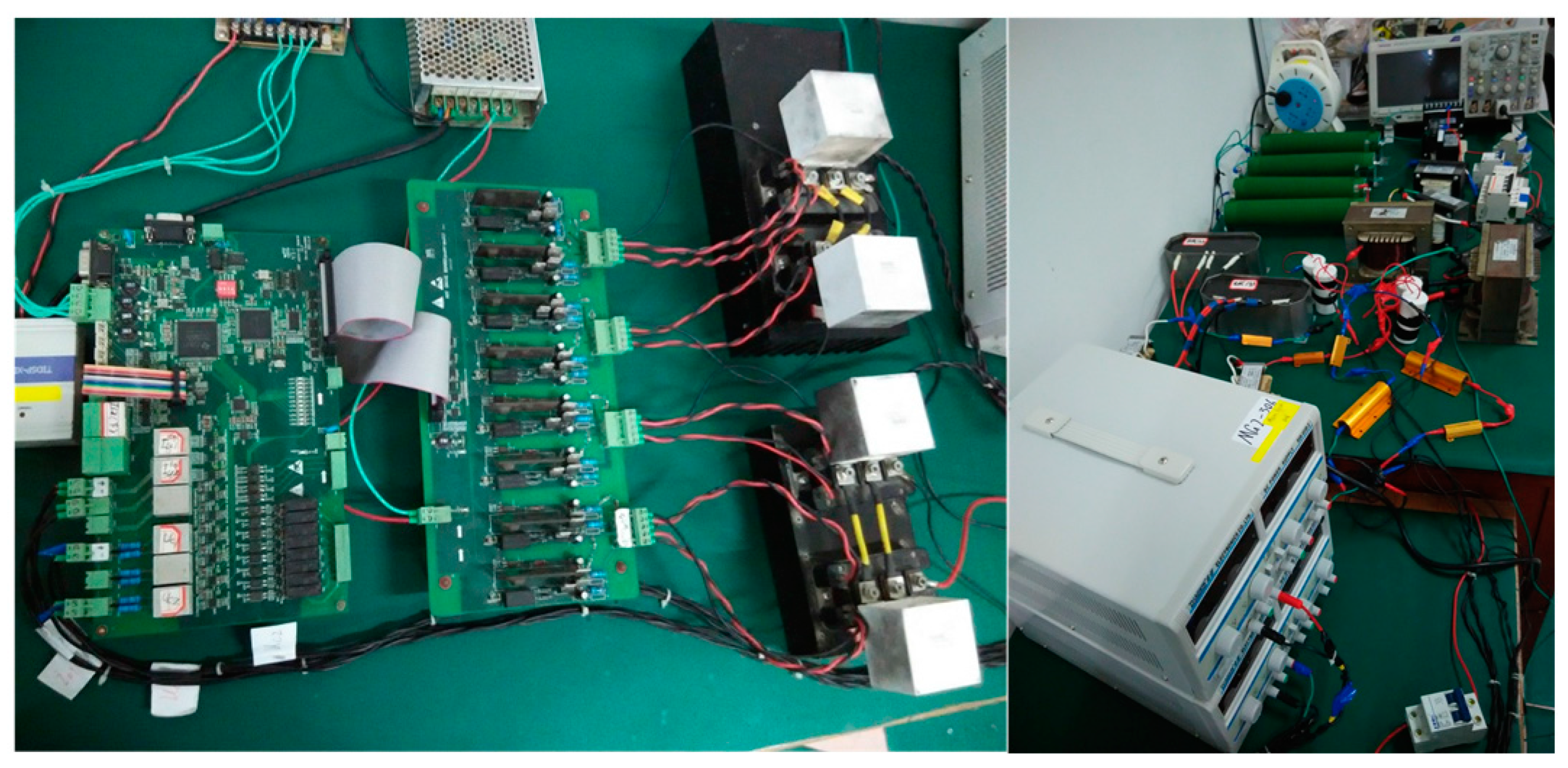
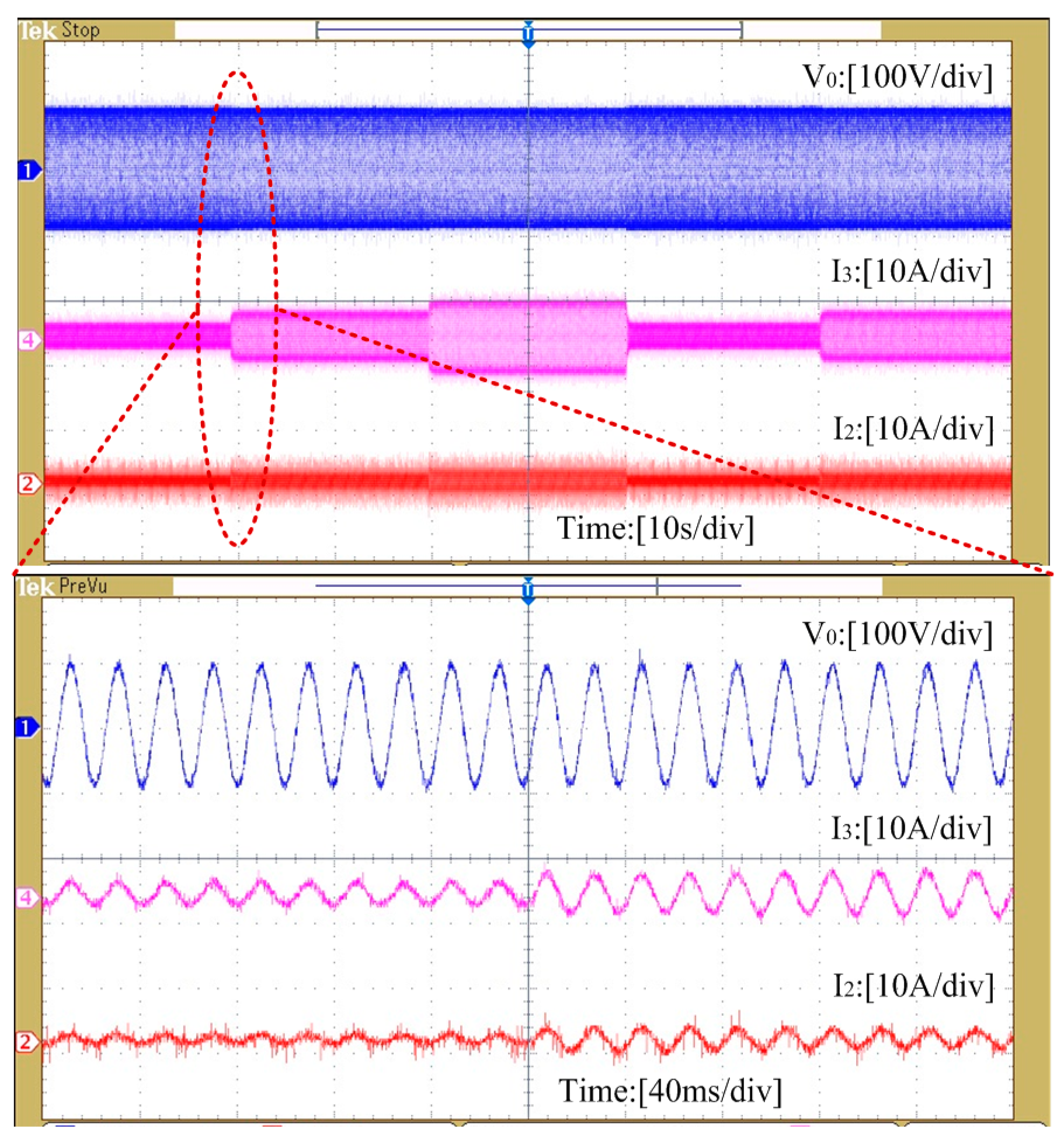
7. Experimental Results
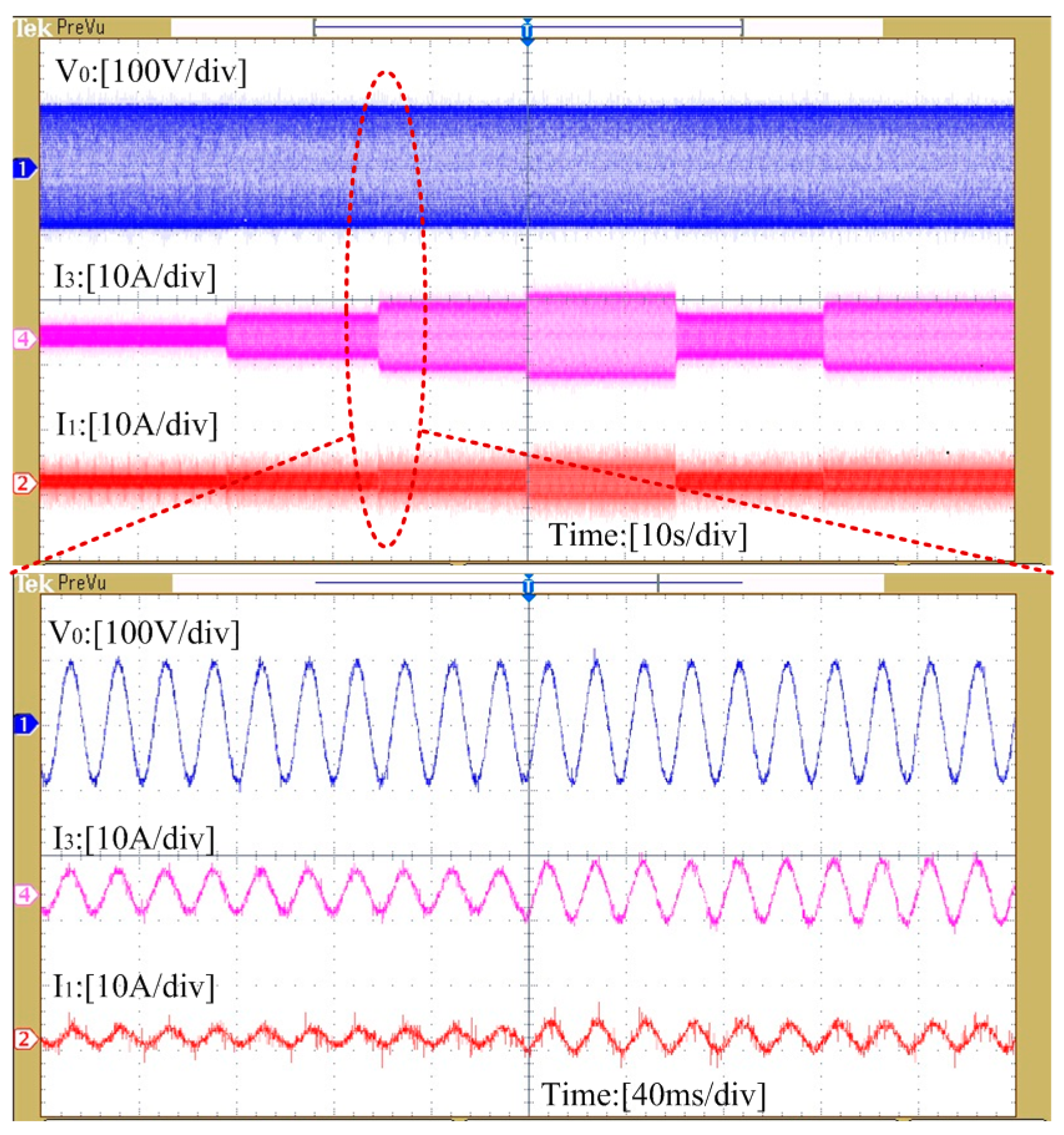
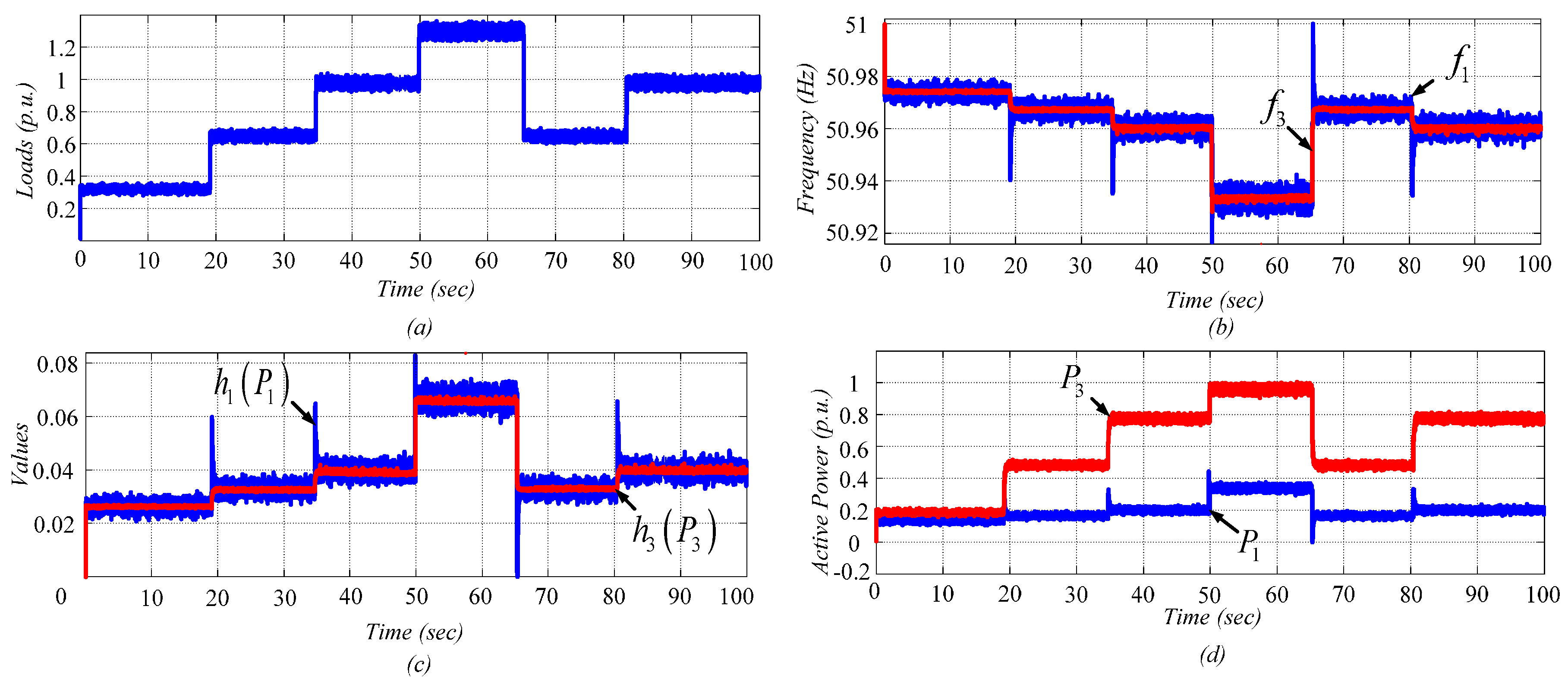
7.1. Case 1: Performance of the Proposed P-f scheme with Equally Rated DGs (DG1 and DG3)
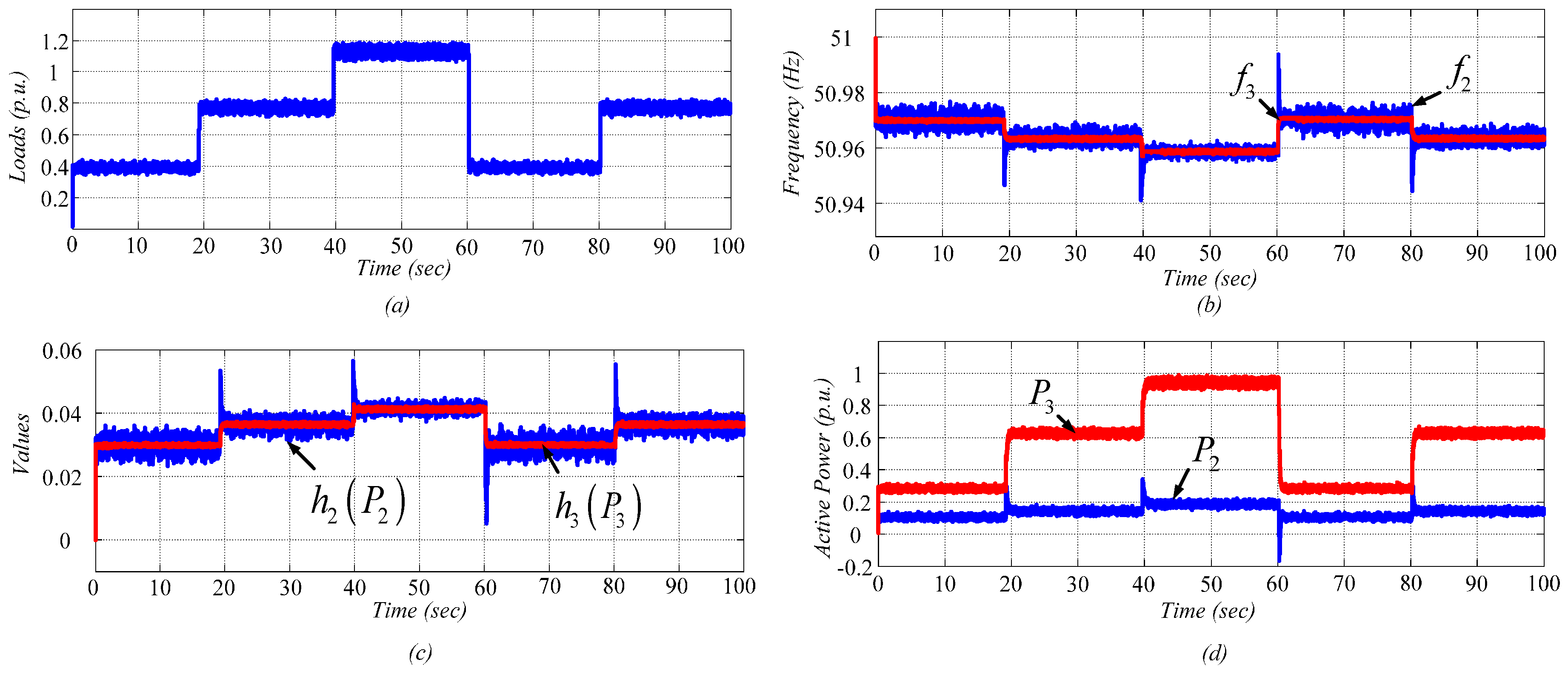
7.2. Case 2: Performance of the Proposed P-f Scheme with Unequally Rated DGs (DG2 and DG3)
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yu, Z.; Ai, Q.; Gong, J.; Piao, L. A novel secondary control for microgrid based on synergetic control of multi-agent system. Energies 2016, 9, 243. [Google Scholar] [CrossRef]
- Camblong, H.; Etxeberria, A.; Ugartemendia, J.; Curea, O. Gain Scheduling Control of an Islanded Microgrid Voltage. Energies 2014, 7, 4498–4518. [Google Scholar] [CrossRef]
- Hu, S.-H.; Lee, T.-L.; Kuo, C.-Y.; Guerrero, J.M. A Riding-through Technique for Seamless Transition between Islanded and Grid-Connected Modes of Droop-Controlled Inverters. Energies 2016, 9, 732. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T. Smart energy management system for optimal microgrid economic operation. IET Renew. Power Gener. 2011, 5, 258–267. [Google Scholar] [CrossRef]
- Fei, W.; Duarte, J. Grid-interfacing converter systems with enhanced voltage quality for microgrid application concept and implementation. IEEE Trans. Power Electron. 2011, 26, 3501–3513. [Google Scholar]
- Lim, Y.; Kim, H.M.; Kinoshita, T. Distributed load-shedding system for agent-based autonomous microgrid operations. Energies 2014, 7, 385–401. [Google Scholar] [CrossRef]
- Lu, X.; Wan, J. Modeling and Control of the Distributed Power Converters in a Standalone DC Microgrid. Energies 2016, 9, 217. [Google Scholar] [CrossRef]
- Lopes, J.P.; Moreira, C.L.; Madureira, A.G. Defining Control Strategies for MicroGrids Islanded Operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Nikmehr, N.; Ravadanegh, S.N. Optimal Power Dispatch of Multi-Microgrids at Future Smart Distribution Grids. IEEE Trans. Smart Grid 2015, 6, 1648–1657. [Google Scholar] [CrossRef]
- Barklund, E.; Pogaku, N.; Prodanovic, M.; Hernandez-Aramburo, C.; Green, T.C. Energy management in autonomous microgrid using stability-constrained droop control of inverters. IEEE Trans. Power Electron. 2008, 23, 2346–2352. [Google Scholar] [CrossRef]
- Nutkani, I.U.; Loh, P.; Wang, P.; Blaabjerg, F. Cost-prioritized droop schemes for autonomous AC microgrids. IEEE Trans. Power Electron. 2015, 30, 1109–1119. [Google Scholar] [CrossRef]
- Li, J.; Wei, W.; Xiang, J. A Simple Sizing Algorithm for Stand-Alone PV/Wind/Battery Hybrid Microgrids. Energies 2012, 5, 5307–5323. [Google Scholar] [CrossRef]
- Song, N.O.; Lee, J.H.; Kim, H.M.; Im, Y.H.; Lee, J.Y. Optimal energy management of multi-microgrids with sequentially coordinated operations. Energies 2015, 8, 8371–8390. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.-H.; Kim, H.-M. Robust Optimization-Based Scheduling of Multi-Microgrids Considering Uncertainties. Energies 2016, 9, 278. [Google Scholar] [CrossRef]
- Che, L.; Shahidehpour, M. DC Microgrids: Economic Operation and Enhancement of Resilience by Hierarchical Control. IEEE Trans. Smart Grid 2014, 5, 2517–2526. [Google Scholar]
- Che, L.; Shahidehpour, M.; Alabdulwahab, A.; Al-Turki, Y. Hierarchical Coordination of a Community Microgrid with AC and DC Microgrids. IEEE Trans. Smart Grid 2015, 6, 3042–3051. [Google Scholar] [CrossRef]
- Li, C.; De Bosio, F.; Chen, F.; Chaudhary, S.K.; Vasquez, J.C.; Guerrero, J.M. Economic Dispatch for Operating Cost Minimization Under Real-Time Pricing in Droop-Controlled DC Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 587–595. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized control for optimizing microgrids operation. IEEE Trans. Energy Convers. 2008, 23, 241–248. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L. Advanced control architectures for intelligent microgrids—Part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Yazdanian, M.; Mehrizi-Sani, A. Distributed control techniques in microgrids. IEEE Trans. Smart Grid 2014, 5, 2901–2909. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, W.; Wang, X.; Liu, L.; Ferrese, F. Online optimal generation control based on constrained distributed gradient algorithm. IEEE Trans. Power Syst. 2015, 30, 35–45. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M.-Y. Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid. IEEE Trans. Power Syst. 2012, 27, 1761–1768. [Google Scholar] [CrossRef]
- Yang, S.; Tan, S.; Xu, J.-X. Consensus based approach for economic dispatch problem in a smart grid. IEEE Trans. Power Syst. 2013, 28, 4416–4426. [Google Scholar] [CrossRef]
- Yan, B.; Wang, B.; Zhu, L. A novel, stable, and economic power sharing scheme for an autonomous microgrid in the energy internet. Energies 2015, 8, 12741–12764. [Google Scholar] [CrossRef]
- Ahn, C.; Peng, H. Decentralized and real-time power dispatch control for an islanded microgrid supported by distributed power sources. Energies 2013, 6, 6439–6454. [Google Scholar] [CrossRef]
- Cosse, R.E.; Alford, M.D.; Hajiaghajani, M.; Hamilton, E.R. Turbine/generator governor droop/isochronous fundamentals—A graphical approach. In Proceedings of the Petroleum and Chemical Industry Conference, Toronto, ON, Canada, 19–21 September 2011. [Google Scholar]
- Jaleeli, N.; VanSlyck, L.S.; Ewart, D.N.; Fink, L.H.; Hoffmann, A.G. Understanding automatic generation control. IEEE Trans. Power Syst. 1992, 7, 1106–1122. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Hang, L.; Uceda, J. Control of distributed uninterruptible power supply systems. IEEE Trans. Ind. Electron. 2008, 55, 2845–2859. [Google Scholar] [CrossRef]
- Lee, C.T. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- Haddadi, A.; Joos, G. Load sharing of autonomous distribution-level microgrids. In Proceedings of the Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011. [Google Scholar]
- Mohamed, Y.A.-R.I.; El-Saadany, E.F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Nutkani, I.U.; Loh, P.C.; Blaabjerg, F. Droop scheme with consideration of operating costs. IEEE Trans. Power Electron. 2014, 29, 1047–1052. [Google Scholar] [CrossRef]
- Cingoz, F.; Elrayyah, A.; Sozer, Y. Plug and play nonlinear droop construction scheme to optimize microgrid operations. In Proceedings of the Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 24–29 July 2011. [Google Scholar]
- Xiao, L.; Boyd, S. Optimal scaling of a gradient method for distributed resource allocation. J. Optim. Theory Appl. 2006, 129, 469–488. [Google Scholar] [CrossRef]
- Ghadimi, E.; Johansson, M.; Shames, I. Accelerated gradient methods for networked optimization. In Proceedings of the American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Dong, J.; Zhang, C.-J.; Meng, X.-M.; Guo, Z.-N.; Kan, Z.-Z. Modeling and stability analysis of autonomous microgrid composed of inverters based on improved droop control. In Proceedings of the International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014. [Google Scholar]
- Pogaku, N.; Prodanovic, M.; Green, T. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Guo, X.Q.; Lu, Z.G.; Wang, B.C. Dynamic Phasors-Based Modeling and Stability Analysis of Droop-Controlled Inverters for Microgrid Applications. IEEE Trans. Smart Grid 2014, 5, 2980–2987. [Google Scholar] [CrossRef]
- Palizban, O.; Kauhaniemi, K. Hierarchical control structure in microgrids with distributed generation: Island and grid-connected mode. Renew. Sustain. Energy Rev. 2015, 44, 797–813. [Google Scholar] [CrossRef]
- Reza, O.S.; Richard, M.M. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar]
- Simpson-Porco, J.W.; Dörfler, F.; Bullo, F. Synchronization and power sharing for droop-controlled inverters in islanded microgrids. Automatica 2013, 49, 2603–2611. [Google Scholar] [CrossRef]
- Byrne, C.L. Iterative Optimization. In A First Course in Optimization; CRC Press: Lowell, MA, USA, 2014. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG | ||||
|---|---|---|---|---|
| DG1 | 0.253 | 0.010 | 1.0 × 10−3 | 3.33 |
| DG2 | 0.150 | 0.049 | 0.4 × 10−3 | 2.86 |
| DG3 | 0.030 | 0.049 | 0 | 0 |
| Parameter | Values | Parameter | Values |
|---|---|---|---|
| Frequency | [50.8, 51] Hz | Max () | 0.5 p.u. |
| Voltage | [0.95, 1.05] p.u. | Max () | 1 p.u. |
| Basic voltage | 380 V | Max ) | 0.563 |
| Basic power | 4 kW | Max () | 0.359 |
| Max () | 1 p.u. | Max () | 0.109 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Frequency | [50.8, 51] Hz | Filter inductor | 1 mH |
| Voltage | [0.95, 1.05] p.u. | Filter capacitor | 20 µF |
| Basic voltage | 96V (Line rms) | Line 3 inductor | 0.6 mH |
| Basic power | 400 W | Line 1, 2 inductor | 0.3 mH |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Li, L.; Wang, L.; Su, M.; Zhao, Y.; Guerrero, J.M. A Novel Decentralized Economic Operation in Islanded AC Microgrids. Energies 2017, 10, 804. https://doi.org/10.3390/en10060804
Han H, Li L, Wang L, Su M, Zhao Y, Guerrero JM. A Novel Decentralized Economic Operation in Islanded AC Microgrids. Energies. 2017; 10(6):804. https://doi.org/10.3390/en10060804
Chicago/Turabian StyleHan, Hua, Lang Li, Lina Wang, Mei Su, Yue Zhao, and Josep M. Guerrero. 2017. "A Novel Decentralized Economic Operation in Islanded AC Microgrids" Energies 10, no. 6: 804. https://doi.org/10.3390/en10060804
APA StyleHan, H., Li, L., Wang, L., Su, M., Zhao, Y., & Guerrero, J. M. (2017). A Novel Decentralized Economic Operation in Islanded AC Microgrids. Energies, 10(6), 804. https://doi.org/10.3390/en10060804