Figure 1.
Islanded AC Microgrid Power System.
Figure 1.
Islanded AC Microgrid Power System.
Figure 2.
Fuel Cell Model.
Figure 2.
Fuel Cell Model.
Figure 3.
Variable-Speed Wind Turbine Model with Supplementary Control Loop.
Figure 3.
Variable-Speed Wind Turbine Model with Supplementary Control Loop.
Figure 4.
The Traditional Second-order LADRC Structure.
Figure 4.
The Traditional Second-order LADRC Structure.
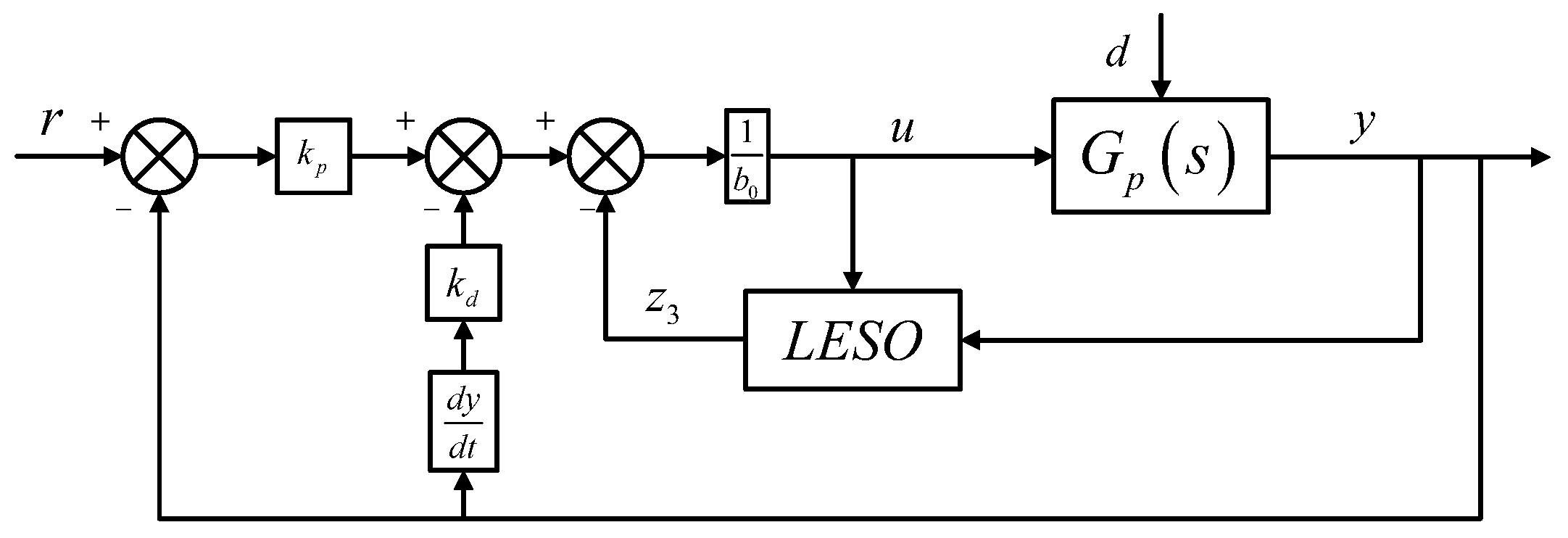
Figure 5.
The Modified Second-order LADRC Structure.
Figure 5.
The Modified Second-order LADRC Structure.
Figure 6.
Aqua Electrolyzer Supplementary Control Block.
Figure 6.
Aqua Electrolyzer Supplementary Control Block.
Figure 7.
Fitness value variation of LADRC.
Figure 7.
Fitness value variation of LADRC.
Figure 8.
Microgrid power system control strategy.
Figure 8.
Microgrid power system control strategy.
Figure 9.
Transient response of system power exchange with −0.2 p.u. change of load demand.
Figure 9.
Transient response of system power exchange with −0.2 p.u. change of load demand.
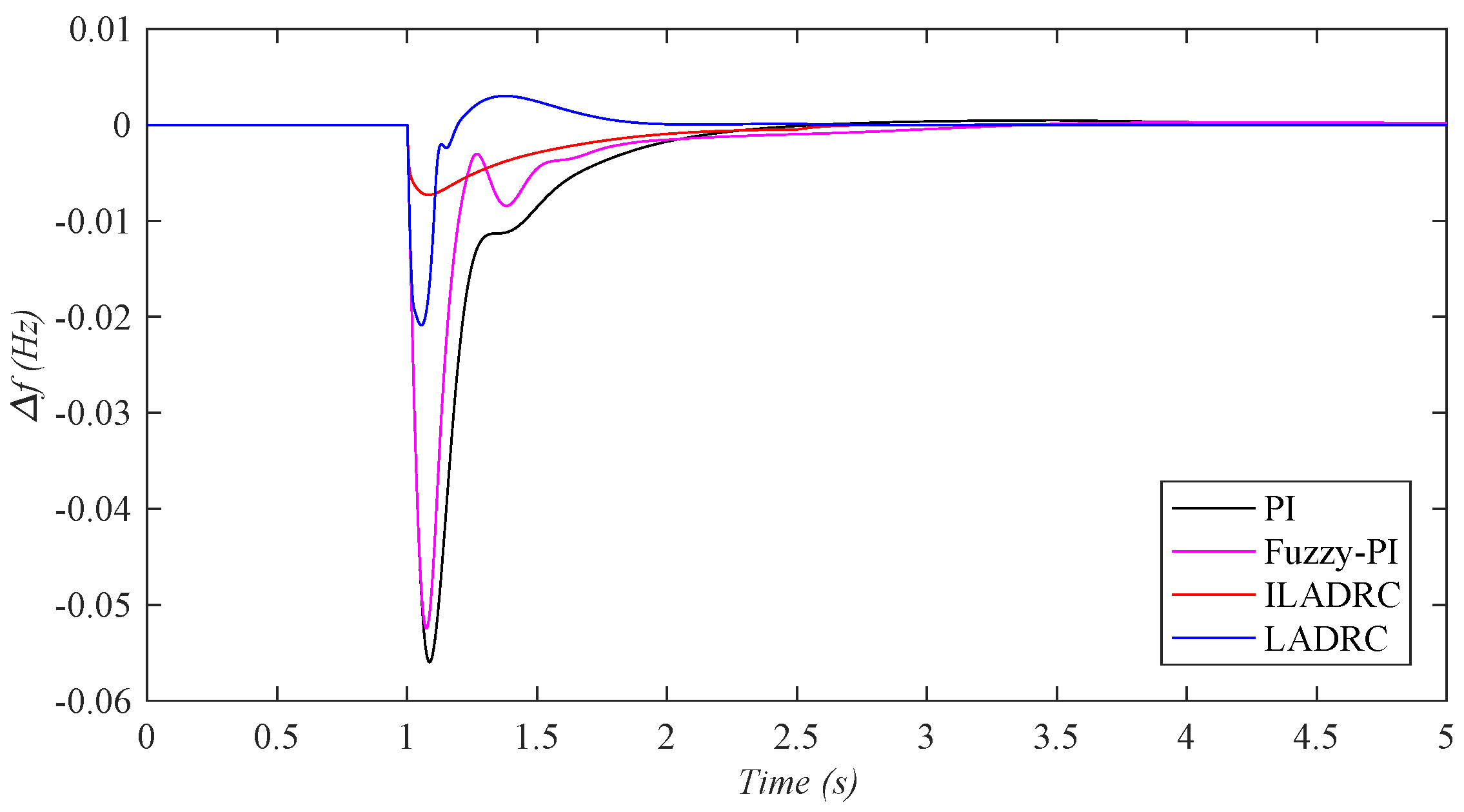
Figure 10.
Transient response of system frequency deviation with −0.2 p.u. change of load demand.
Figure 10.
Transient response of system frequency deviation with −0.2 p.u. change of load demand.
Figure 11.
Transient power response of each energy sources with −0.2 p.u. change of load demand based on ILADRC controller. (a) Load power change; (b) Dynamic response of DG; (c) Dynamic response of FC; (d) Dynamic response of AE; (e) Dynamic response of WTG.
Figure 11.
Transient power response of each energy sources with −0.2 p.u. change of load demand based on ILADRC controller. (a) Load power change; (b) Dynamic response of DG; (c) Dynamic response of FC; (d) Dynamic response of AE; (e) Dynamic response of WTG.
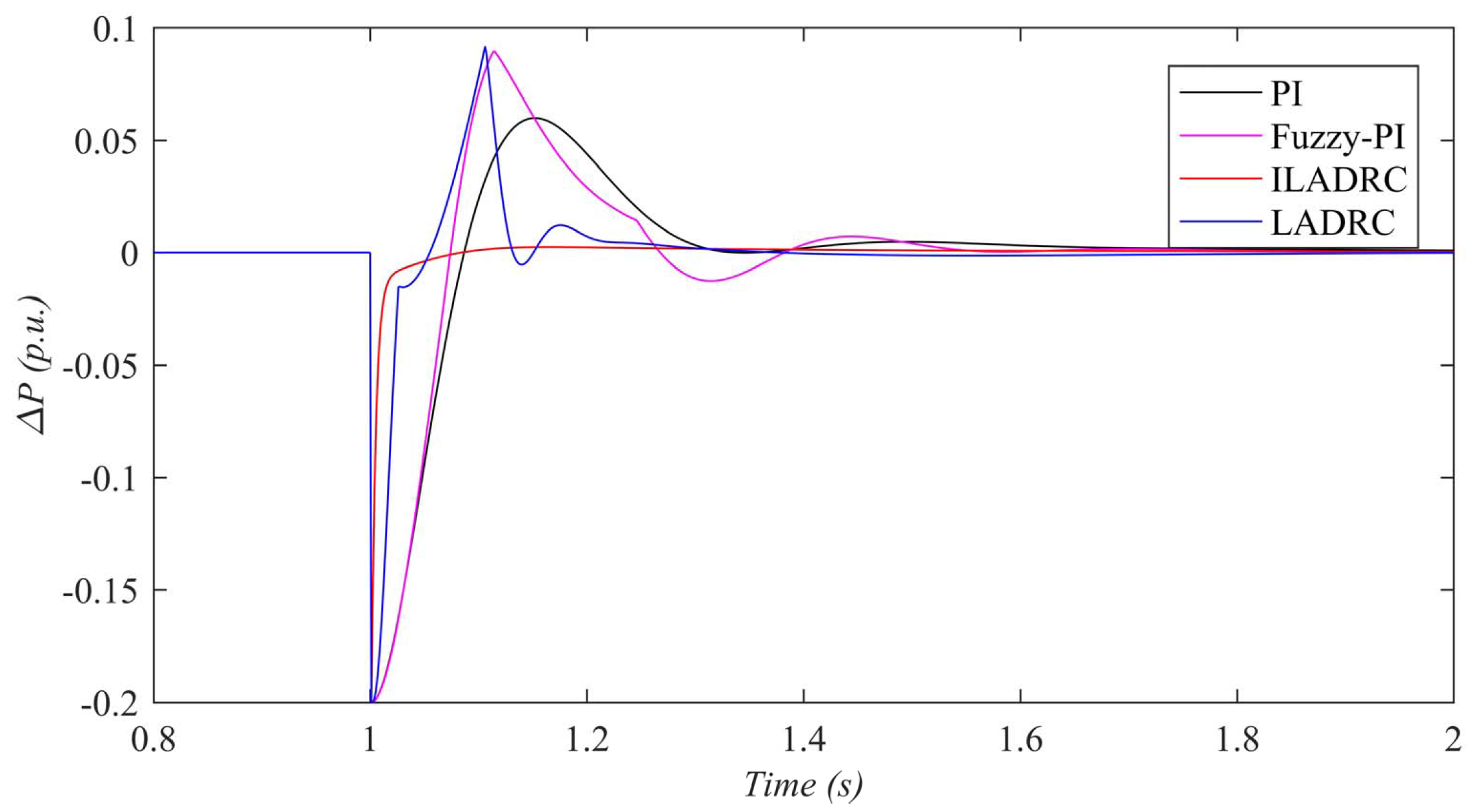
Figure 12.
Transient response of system power exchange with +0.2 p.u. change of load demand.
Figure 12.
Transient response of system power exchange with +0.2 p.u. change of load demand.
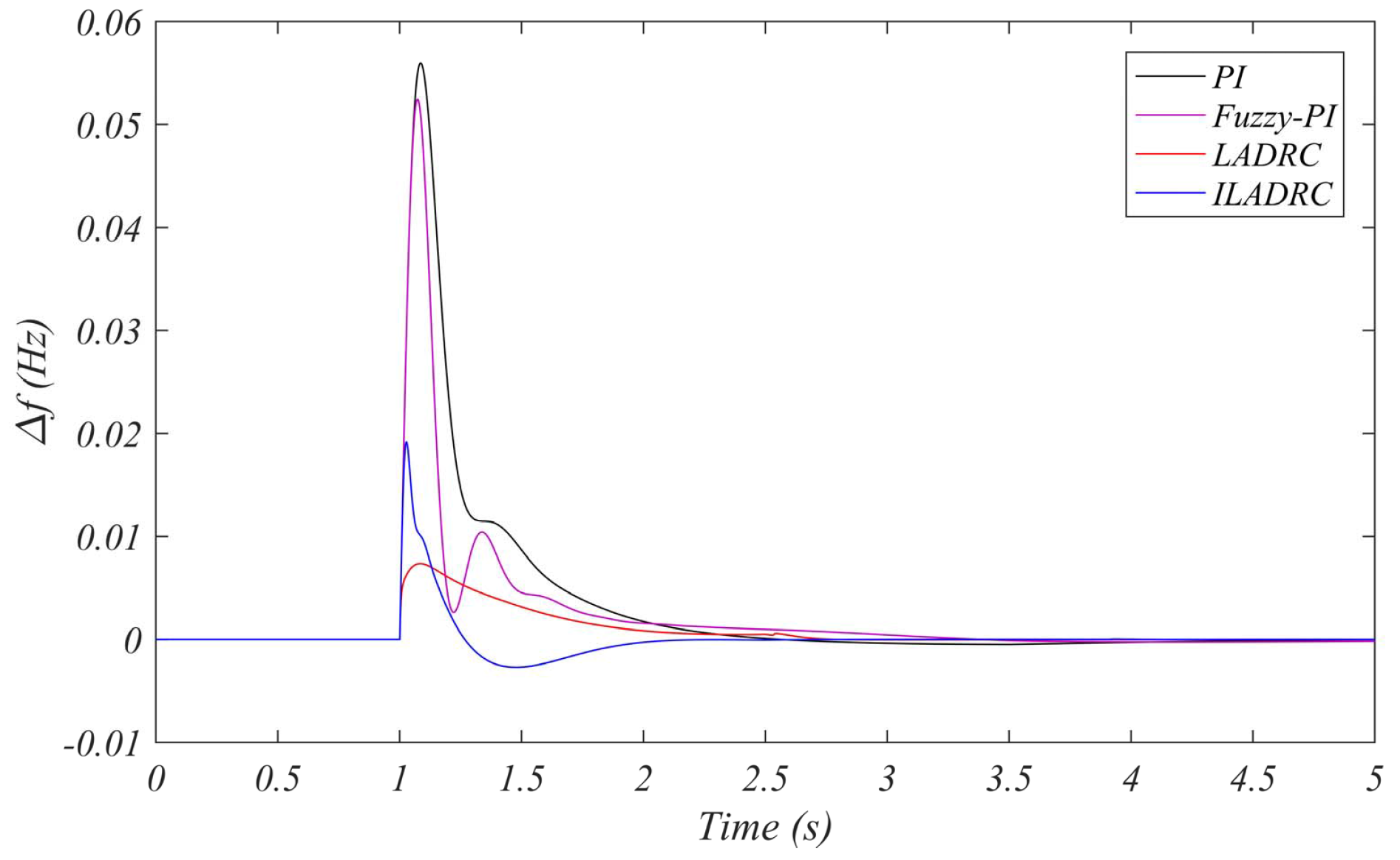
Figure 13.
Transient response of system frequency deviation with +0.2 p.u. change of load demand.
Figure 13.
Transient response of system frequency deviation with +0.2 p.u. change of load demand.
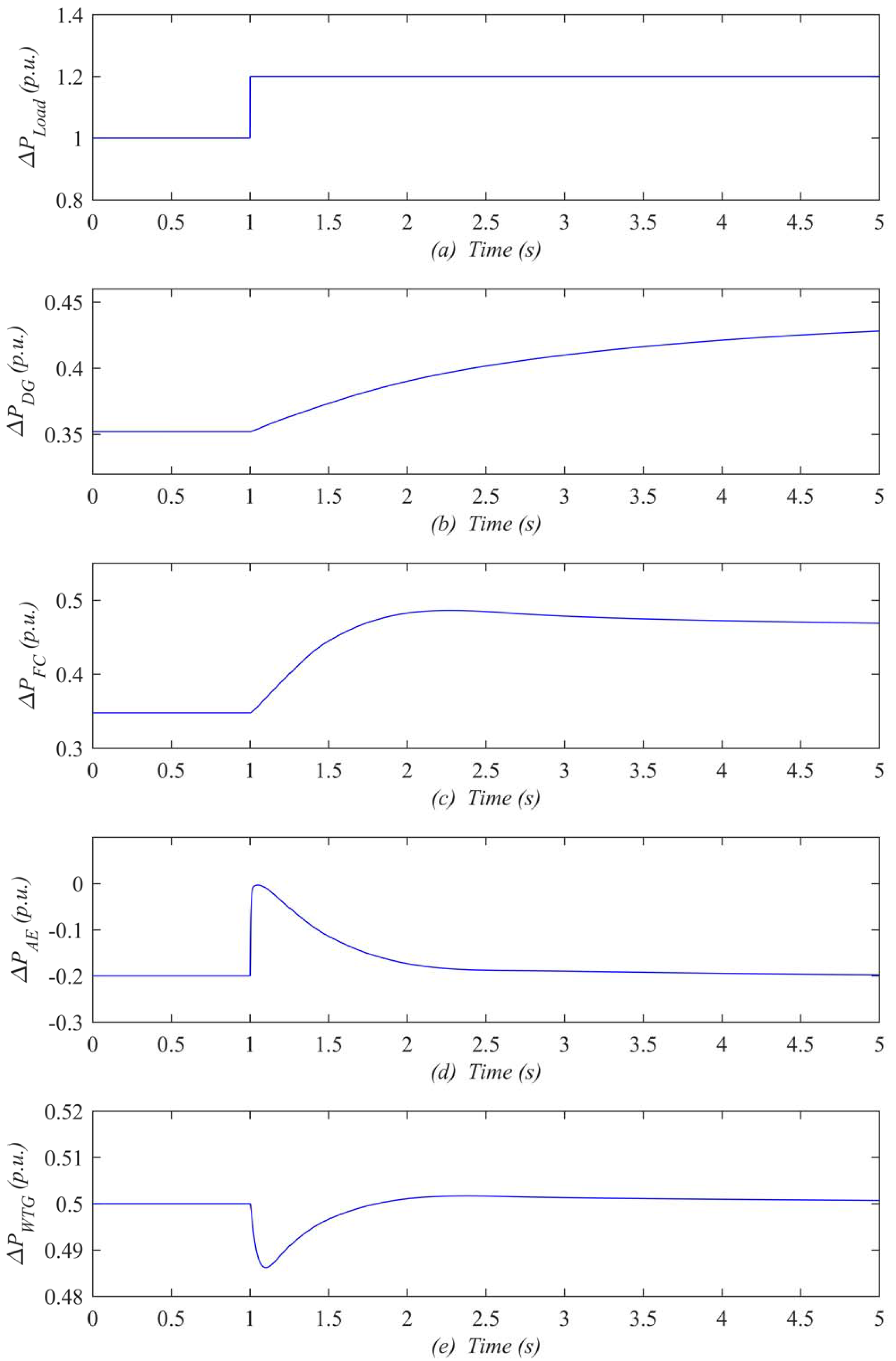
Figure 14.
Transient power response of each energy sources with +0.2 p.u. change of load demand based on ILADRC controller. (a) Load power change; (b) Dynamic response of DG; (c) Dynamic response of FC; (d) Dynamic response of AE; (e) Dynamic response of WTG.
Figure 14.
Transient power response of each energy sources with +0.2 p.u. change of load demand based on ILADRC controller. (a) Load power change; (b) Dynamic response of DG; (c) Dynamic response of FC; (d) Dynamic response of AE; (e) Dynamic response of WTG.
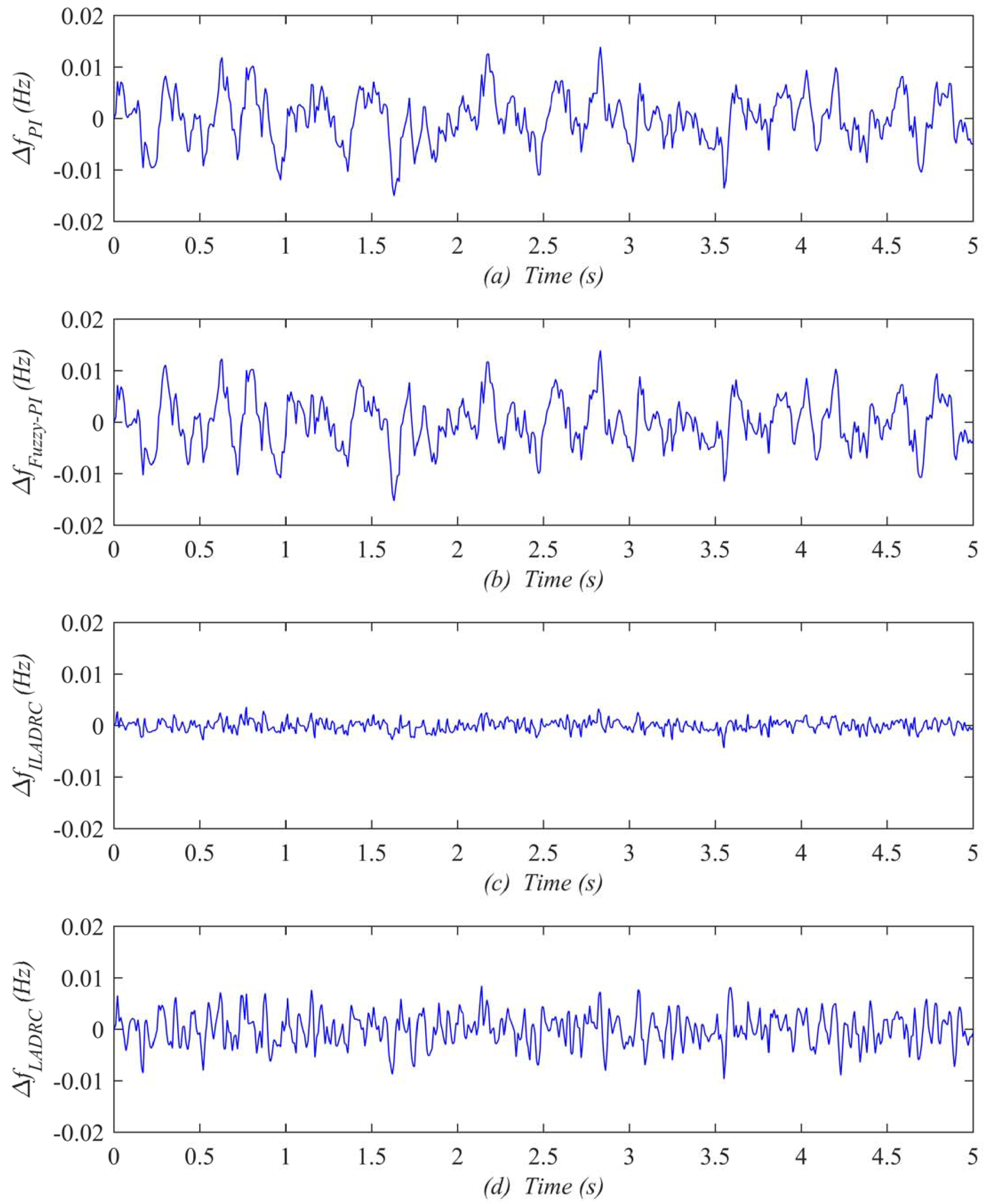
Figure 15.
Transient response of system frequency deviation under stochastic power output of wind turbine generator. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 15.
Transient response of system frequency deviation under stochastic power output of wind turbine generator. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 16.
Stochastic power output of wind turbine generator.
Figure 16.
Stochastic power output of wind turbine generator.
Figure 17.
Stochastic load demand.
Figure 17.
Stochastic load demand.
Figure 18.
Transient response of system frequency deviation under stochastic load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 18.
Transient response of system frequency deviation under stochastic load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 19.
Transient response of system frequency deviation under stochastic power of wind turbine generator and stochastic load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 19.
Transient response of system frequency deviation under stochastic power of wind turbine generator and stochastic load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
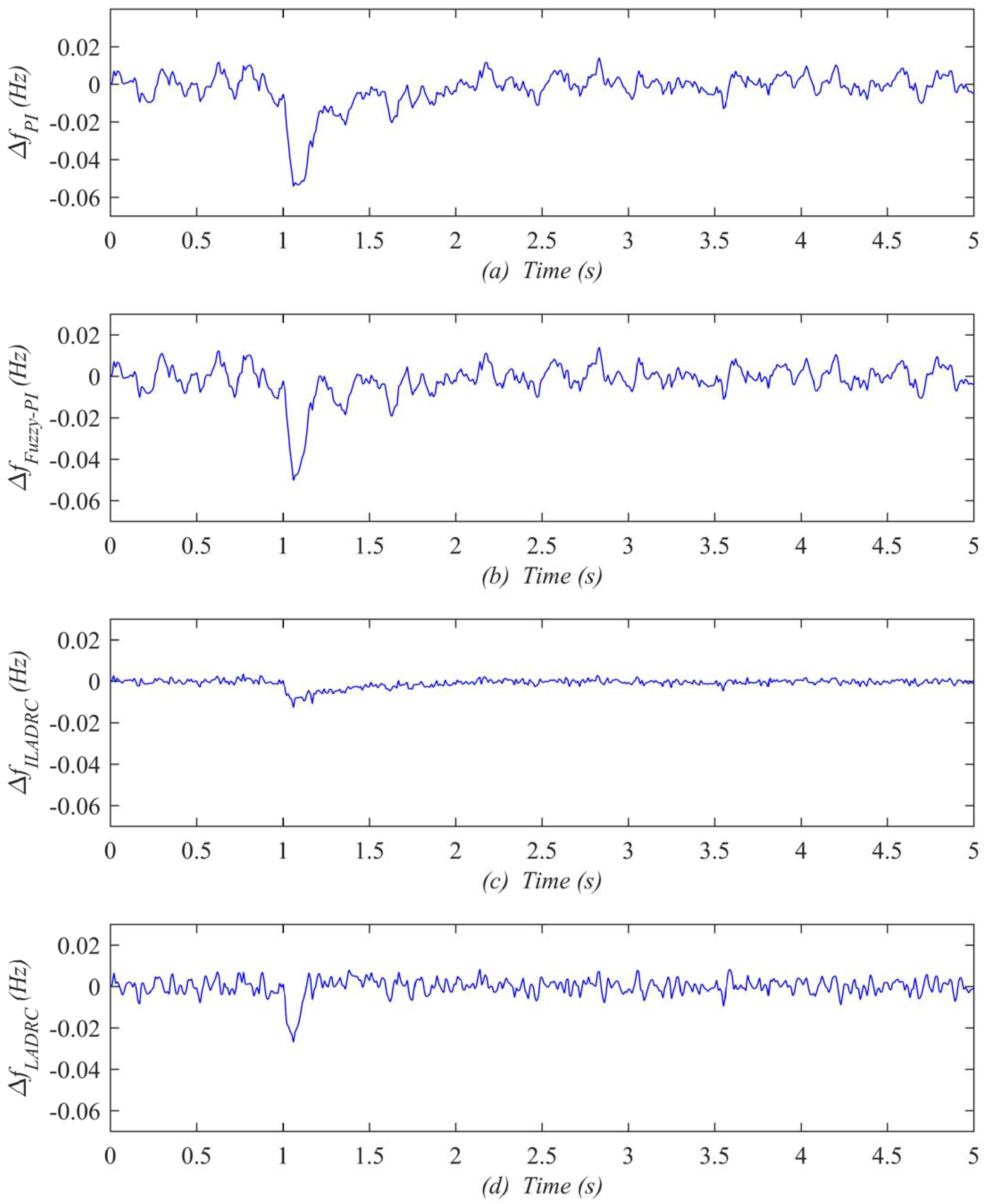
Figure 20.
Transient response of system frequency deviation under stochastic power of wind turbine generator and +0.2 p.u. change of load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 20.
Transient response of system frequency deviation under stochastic power of wind turbine generator and +0.2 p.u. change of load demand. (a) Frequency deviation with PI controller; (b) Frequency deviation with Fuzzy-PI controller; (c) Frequency deviation with ILADRC controller; (d) Frequency deviation with LADRC controller.
Figure 21.
The comparison of robust performance testing results.
Figure 21.
The comparison of robust performance testing results.
Table 1.
System, DG and AE model parameters used for simulation.
Table 1.
System, DG and AE model parameters used for simulation.
| Symbol | Description | Value | Unit |
|---|
| M | Power system inertia constant | 0.1667 | - |
| D | Power system damping constant | 0.015 | - |
| Diesel generator gain | 1/300 | - |
| Valve devise time constant | 0.8 | s |
| Diesel generator time constant | 2 | s |
| Aqua electrolyzer gain | 1/500 | - |
| Aqua electrolyzer time constant | 0.1 | s |
Table 2.
FC model parameters used for simulation.
Table 2.
FC model parameters used for simulation.
| Symbol | Description | Value | Unit |
|---|
| T | Absolute temperature | 1273 | K |
| F | Faraday’s constant | 96485 | C/mol |
| R | Universal gas constant | 8314 | J/(kmol·K) |
| Ideal standard potential | 1.18 | V |
| Number of cells in series in the stack | 384 | - |
| Constant, | | kmol (s·A) |
| Maximum fuel utilization | 0.9 | - |
| Minimum fuel utilization | 0.8 | - |
| Optimal fuel utilization | 0.85 | - |
| Ratio of hydrogen to oxygen | 1.145 | - |
| Electrical response time | 0.8 | s |
| Fuel flow response time | 0.5 | s |
| Value molar constant for hydrogen | | kmol/(s·atm) |
| Value molar constant for oxygen | | kmol/(s·atm) |
| Value molar constant for water | | kmol/(s·atm) |
| Response time for hydrogen flow | 26.1 | s |
| Response time for oxygen flow | 2.91 | s |
| Response time for water flow | 78.3 | s |
| r | Ohmice resistance | 0.126 | Ω |
Table 3.
WTG model parameters used for simulation.
Table 3.
WTG model parameters used for simulation.
| Symbol | Description | Value | Unit |
|---|
| Wind turbine generator inertia | | s |
| Convertor response time constant | | s |
| Power measurement time constant | 5 | s |
| Wind turbine generator voltage | | p.u. |
| Speed regulator proportional constant | 3 | - |
| Speed regulator integral constant | 0.6 | - |
| Contribution coefficient | 4 | s |
| Wind turbine generator output power limits | 0.1∼1.2 | p.u. |
Table 4.
The parameters of ILADRC controller used for simulation.
Table 4.
The parameters of ILADRC controller used for simulation.
| Diesel Generator | Aqua Electrolyzer | Fuel Cell |
|---|
| | | | | | | | |
| 3.2270 | 8.4405 | 4.2164 | 73.8680 | 23.4958 | 5.7231 | 0.2379 | 14.6713 | 10.1203 |
Table 5.
The parameters of LADRC controller used for simulation.
Table 5.
The parameters of LADRC controller used for simulation.
| Diesel Generator | Aqua Electrolyzer | Fuel Cell |
|---|
| | | | | | | | |
| 0.0503 | 11.0225 | 11.5792 | 19.0382 | 30.4135 | 7.5005 | 0.0490 | 30.1004 | 5.1474 |
Table 6.
The parameters of PI and Fuzzy-PI controller used for simulation.
Table 6.
The parameters of PI and Fuzzy-PI controller used for simulation.
| Diesel Generator | Aqua Electrolyzer | Fuel Cell |
|---|
| | | | | |
| 0.4395 | 12.9450 | 3.6890 | 14.4411 | 195.4674 | 209.2223 |
Table 7.
Performance comparison with ILADRC, LADRC, PI and Fuzzy-PI controller.
Table 7.
Performance comparison with ILADRC, LADRC, PI and Fuzzy-PI controller.
| Case | Controller | Overshoot | Settling Time | ITAE | RoCoF | ITAE + RoCoF |
|---|
| −0.2 p.u. Load Change | ILADRC | −0.0074 Hz | 0.184 s | 0.0092 | 0.0211 | 0.0303 |
| LADRC | −0.0192 Hz | 0.260 s | 0.0046 | 0.0449 | 0.0545 |
| Fuzzy-PI | −0.0525 Hz | 0.470 s | 0.0219 | 0.1317 | 0.1536 |
| PI | −0.0525 Hz | 0.660 s | 0.0169 | 0.1403 | 0.1572 |
| +0.2 p.u. Load Change | ILADRC | 0.0073 Hz | 0.112 s | 0.0081 | 0.0187 | 0.0268 |
| LADRC | 0.0209 Hz | 0.262 s | 0.0045 | 0.0545 | 0.0590 |
| Fuzzy-PI | 0.0525 Hz | 0.484 s | 0.1677 | 0.1314 | 0.1481 |
| PI | 0.0560 Hz | 0.659 s | 0.0218 | 0.1316 | 0.1534 |
Table 8.
Comparison of the range of variation of with ILADRC, LADRC, PI and Fuzzy-PI controller under different disturbances.
Table 8.
Comparison of the range of variation of with ILADRC, LADRC, PI and Fuzzy-PI controller under different disturbances.
| Controller | The Range of Variation of |
|---|
| With Stochastic | With Stochastic | With Stochastic and |
|---|
| ILADRC | −0.0044 Hz∼0.0036 Hz | −0.0034 Hz∼0.0036 Hz | −0.0044 Hz∼0.0054 Hz |
| LADRC | −0.0097 Hz∼0.0084 Hz | −0.0070 Hz∼0.0065 Hz | −0.0104 Hz∼0.0102 Hz |
| Fuzzy-PI | −0.0150 Hz∼0.0139 Hz | −0.0097 Hz∼0.0095 Hz | −0.0172 Hz∼0.0189 Hz |
| PI | −0.0153 Hz∼0.0139 Hz | −0.0097 Hz∼0.0103 Hz | −0.0173 Hz∼0.0190 Hz |
Table 9.
Performance comparison with ILADRC, LADRC, PI and Fuzzy-PI controller under stochastic power of wind turbine generator and +0.2 p.u. change of load demand.
Table 9.
Performance comparison with ILADRC, LADRC, PI and Fuzzy-PI controller under stochastic power of wind turbine generator and +0.2 p.u. change of load demand.
| Controller | Overshoot | ITAE |
|---|
| ILADRC | −0.0127 Hz | 0.0131 |
| LADRC | −0.0269 Hz | 0.0304 |
| Fuzzy-PI | −0.0503 Hz | 0.0551 |
| PI | −0.0542 Hz | 0.0551 |
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}