
State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors




Abstract
:1. Introduction
2. Historical Analysis of the Development of the Theoretical Foundations of Electric Induction Motors and Fault Types and Statistics
2.1. Historical Analysis of the Development of the Theoretical Foundations of Electric Induction Motors
- e = Electromotive force (volts)
- = Design factor of the machine
- N = Number of coil turns
- Ф = Magnetic flux (webers)
- B = Flux density (Teslas)
- A = Transversal section crossed by the flow (m2)
- f(t) = Signal as a function of time.
- V1 = Signal magnitude.
- θ = Phase angle difference.
2.2. Types of Failures of Induction Motors and Occurrence Statistics
2.3. Maintenance Strategies
- Careful planning and control.
- Optimization of the resources.
- Adherence to safe working procedures.
- Continuous research and development of integrated management tools.
- Reduction of repair costs caused by a breakdown.
- Increased availability or useful life of the machines.
- More targeted planning of the maintenance work.
- Better protection of industrial equipment, since it takes into account the state of the components to prevent failure thereof.
- Detect anomalies immediately, at the control or diagnostic center.
- Record the behavior of the machine.
- Collect data in extreme climate situations.
- Minimize unnecessary maintenance actions.
- Allows the remote and automatic monitoring of the components and provides abundant information regarding the operation thereof.
3. Maintenance of Electric Induction Motors
- Electromagnetic field monitoring, search coils, and coils wound around motor shafts (axial flux related detection).
- Temperature measurements.
- Infrared recognition.
- Radio Frequency (RF) emissions monitoring.
- Noise and vibration measurements and monitoring.
- Chemical analysis.
- Acoustic measurements.
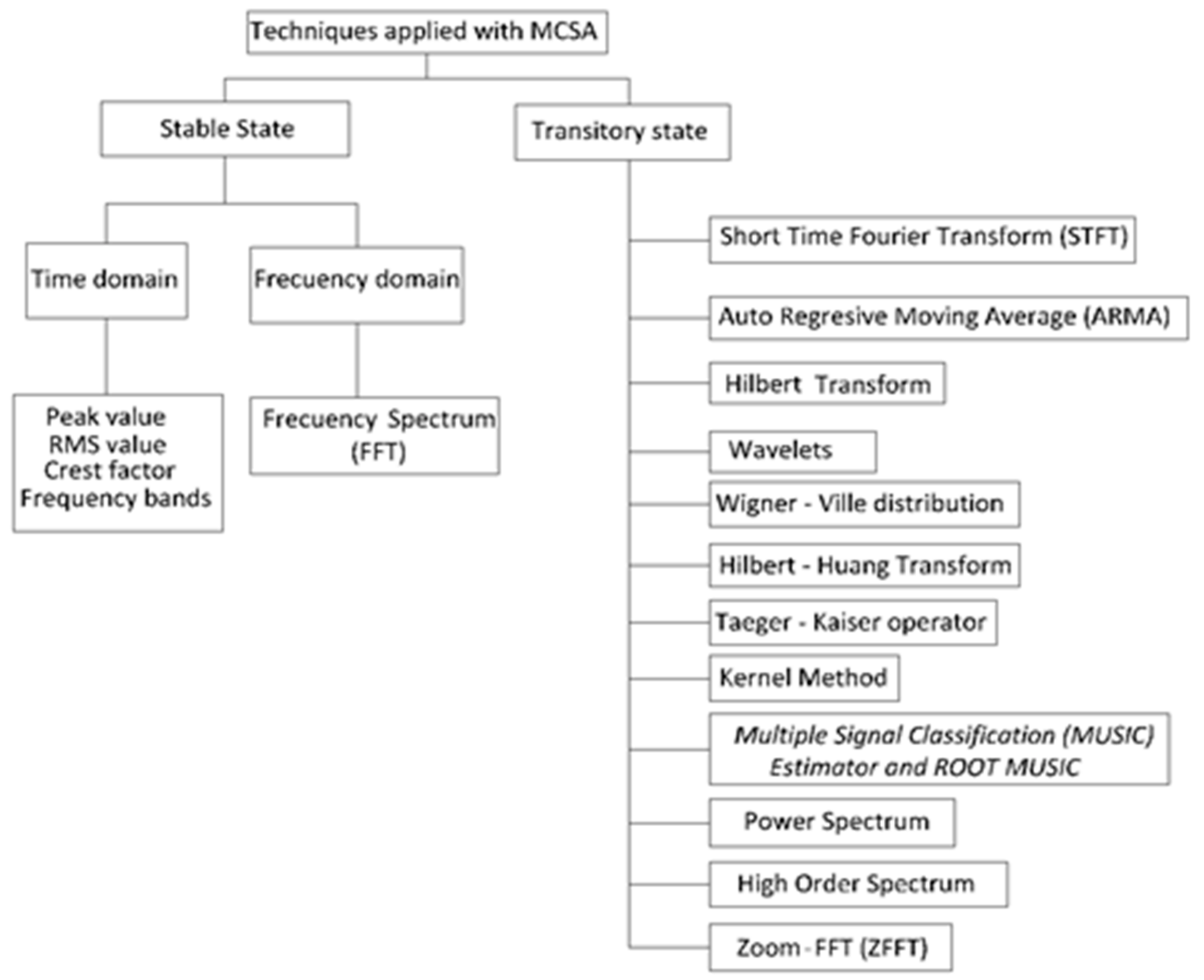
- Motor Current Signature Analysis (MCSA).
3.1. Maintenance through Invasive Techniques
3.2. Maintenance through Non-Invasive Techniques
- Reducing computation time.
- Saving memory space.
- Security in the specified frequency range.
3.3. Software and Hardware Used for Monitoring, Detection, and Diagnosis of Failures
- On-line health monitoring of induction motors by using LabVIEW to diagnose the mechanical faults.
- Analysis of induction motor performance.
- Internet technology-based development of remote diagnosis to check the machine status through the Internet and mobile terminals.
- CM of AC motors through intelligent fault diagnosis based on programmable logic controllers.
- Analysis of three-phase induction motor using the current Park’s vector.
4. Failures According to the Part of the Machine and Diagnostic Methods
4.1. Rotor Failures
4.1.1. Broken Bars
- I = Magnitude of the fundamental component of the current
- Amplitude of the left lateral component (stator current) referred to its original component
- = Number of rotor bars
- = Number of continuous broken bars
- P = Number of poles
- (2
- Idb = [20log10(I1/I + 20log10(I1/I)]/2
- P = Number of pole pairs of the motor
- Ns = Sync speed (rpm)
- N = Asynchronous speed (rpm)
4.1.2. Eccentricity
- = Components associated with eccentricity
- = Frequency of the network
- R = Number of rotor slots
- s = Sliding
- p = Pairs of poles
- = ±1
- = 1, 3, 5, 7…
4.1.3. Rotoric Asymmetry
4.2. Bearings
4.2.1. Failure Detection through Stator Currents
- = Frequency of the network
- Number of spheres
- Mechanical speed of the rotor (Hz)
- = Diameter of the spheres
- = Bearing pitch diameter
- = Contact angle between the spheres and the tracks
- 1, 2, 3, …
- Failure frequency of the cage
- Failure frequency of the internal track
- Failure frequency of the external track
- Failure frequency of the spheres
- = Diameter of the spheres
- = Pitch diameter
4.2.2. Detection of Failures through Vibrational Analysis
- Ball pass frequency outer ring
- Ball pass frequency inner ring
- n = Number of balls
- N = Rotational speed (rpm)
- d = Ball diameter
- D = Bearing pitch diameter
- β = Ball contact angle with the race.
4.3. Detection of Stator Failures
4.3.1. Detection of Stator Shortcuts through MCSA
- = Components associated with the short circuit
- = Frequency of the network
- s = Sliding
- p = Pairs of poles
- n = 1, 2, 3, 4, …
- k = 1, 3, 5, 7, …
4.3.2. Stator Asymmetry
- , , = Positive, negative and zero sequence currents, respectively
- , , = Line currents
4.4. Combined Failures
5. Predictive Maintenance Based on Artificial Intelligence Techniques
- To be as simple as possible, i.e., having a minimum number of indicators, neurons, and rules.
- To require minimum prior knowledge.
- To have the most important steps of a system that uses SC techniques to perform a diagnosis as shown in Figure 13.
6. Conclusions and Recommendations
Acknowledgments
Conflicts of Interest
References
- Hunt, B. Pursuing Power and Light: Technology and Physics from James Watt to Albert Einstein, 1st ed.; Johns Hopkins University Press: Baltimore, MD, USA, 2010; pp. 14–134. ISBN 100801893593. [Google Scholar]
- Hernández, M.; Prieto, J. Historia de la Ciencia Vol II, 1st ed.; Fundacion Canaria Orotawa de Historia de la Ciencia: Tenerife, Spain, 2007; pp. 54–69. ISBN 978-84-612-4246-7. [Google Scholar]
- Shu-Hua, P. Origine de la Boussole. J. Hist. Sci. Soc. 1954, 45, 175–196. [Google Scholar] [CrossRef]
- May, W. The birth of the compass. J. Navig. 1949, 2, 259–263. [Google Scholar] [CrossRef]
- Daub, W.; Seese, W. Química, 8th ed.; Prentice Hall: Mexico City, Mexico, 1998; pp. 57–82. ISBN 970-26-0694-2. [Google Scholar]
- Arya, S. Fundamentals of Magnetism and Electricity; Navyug Publishers & Distributors: New Delhi, India, 2009; pp. 60–65. [Google Scholar]
- Cheng, D. Fundamentos de Electromagnetismo Para Ingeniería, 1st ed.; Addison-Wesley Iberoamericana: Wilmington, DE, USA, 1997; pp. 196–197. ISBN 0-201-65375-3. [Google Scholar]
- Hughes, A.; Drury, B.; MacLoud, D. Electric Motors and Drives: Fundamentals, Types and Applications, 3rd ed.; Elsevier: Oxford, UK, 2005; pp. 185–191. ISBN 978-0-7506-4718-2. [Google Scholar]
- Kline, R. Science and engineering theory in the invention and development of the induction motor, 1880–1900. Technol. Cult. 1987, 28, 283–313. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines, 2nd ed.; John Wiley & Sons: Chichester, UK, 2013; pp. 3–4. ISBN 978-0-470-69516-6. [Google Scholar]
- Trzynadlowski, A. Detection of mechanical abnormalities in induction motors by electric measurements. Int. J. Rotat. Mach. 1999, 5, 41–52. [Google Scholar] [CrossRef]
- Filippetti, F.; Franceschini, G.; Tassoni, C.; Vas, P. Broken bar detection in induction machines: Comparison between current spectrum approach and parameter estimation approach. In Proceedings of the Conference Record of the 1994 IEEE Industry Applications Society Annual Meeting, Denver, CO, USA, 2–6 October 1994; pp. 95–102. [Google Scholar] [CrossRef]
- Serway, R.; Jewett, J. Física Para Ciencias e Ingeniería, 6th ed.; Cengage Learning: Ciudad de México, México, 2007; pp. 191–250. ISBN 970-686-425-3. [Google Scholar]
- Ferreira, B.; Van der Merwe, W. The Principles of Electronic and Electromechanic Power Conversion: A Systems Approach; John Wiley & Sons: Hoboken, NJ, USA, 2013; pp. 56–61. ISBN 978-1-118-65609-9. [Google Scholar]
- Sundararajan, D. The Discrete Fourier Transform: Theory, Algorithms and Applications, 1st ed.; World Scientific Publishing Company: Singapore, 2001; pp. 1–11. ISBN 9789812810298. [Google Scholar]
- Hansen, E. Fourier Transforms: Principles and Applications, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2014; pp. 109–278. ISBN 978-1-118-47914-8. [Google Scholar]
- Stranneby, D.; Walker, W. Digital Signal Processing and Applications, 2nd ed.; Elsevier Science: Burlington, MA, USA, 2014; pp. 131–139. ISBN 0750663448. [Google Scholar]
- Boukra, T.; Lebaroud, A. Classification of induction machine faults, Systems Signals and Devices (SSD). In Proceedings of the 7th IEEE International Multi-Conference, Amman, Jordan, 27–30 June 2010; pp. 1–6. [Google Scholar]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Guide for Induction Machinery Maintenance Testing and Failure Analysis. IEEE Standards. Available online: https://dialnet.unirioja.es/servlet/tesis?codigo=38169 (accessed on 12 January 2016).
- Peña, H.; Ramirez, C.; Ledezma, E. Maintenance Testing and Failure. Energía y Computación 1994, 8, 71–76. [Google Scholar]
- O#x2019;Donnell, P. Report of large motor reliability survey of industrial and commercial installations, Part I. IEEE Trans. Ind. Appl. 1985, IA-21, 853–864. [Google Scholar] [CrossRef]
- Bonnett, A. Root cause AC motor failure analysis with a focus on shaft failures. IEEE Trans. Ind. Appl. 2000, 36, 1435–1448. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Tassoni, C.; Capolino, G. Advances in diagnostic techniques for induction machines. IEEE Trans. Ind. Electron. 2008, 55, 4109–4126. [Google Scholar] [CrossRef]
- Zhang, P.; Du, Y.; Habetler, T.; Lu, B. A survey of condition monitoring and protection methods for medium-voltage induction motors. IEEE Trans. Ind. Appl. 2011, 47, 34–46. [Google Scholar] [CrossRef]
- Garcia-Perez, A.; Romero-Troncoso, R.; Cabal-Yepez, E.; Osornio-Rios, R. The application of high-resolution spectral analysis for identifying multiple combined faults in induction motors. IEEE Trans. Ind. Electron. 2011, 58, 2002–2010. [Google Scholar] [CrossRef]
- Bianchini, F.; Monteiro, P.; Pederiva, R.; Diniz, V. An empirical demodulation for electrical fault detection in induction motors. IEEE Trans. Instrum. Meas. 2016, 65, 559–569. [Google Scholar] [CrossRef]
- Costa, A. Investigación de Nuevas Técnicas de Mantenimiento de Parques Eólicos. Ph.D. Thesis, Department of Marine Power and Propulsion, Coruña University, Coruña, Spain, 2012. [Google Scholar]
- Haji, M.; Toliyat, H. Pattern recognition—A technique for induction machines rotor broken bar detection. IEEE Trans. Energy Convers. 2001, 16, 312–317. [Google Scholar] [CrossRef]
- Soualhi, A.; Medjaher, K.; Zerhouni, N. Bearing health monitoring based on Hilbert—Huang transform, support vector machine, and regression. IEEE Trans. Instrum. Meas. 2015, 64, 52–62. [Google Scholar] [CrossRef]
- Das, A.; Maiti, J.; Banerjee, R. Process monitoring and fault detection strategies: A review. Int. J. Q. Res. Manag. 2012, 29, 720–752. [Google Scholar] [CrossRef]
- Alsyouf, I.; Alzghoul, A. Soft computing applications in wind power systems: A review and analysis. In Proceedings of the European Offshore Wind 2009 Conference Exhibition, Stockholm, Sweden, 14–16 September 2009. [Google Scholar]
- Aroui, T.; Koubaa, Y.; Toumi, A. Application of feedforward neural network for induction machine rotor faults diagnostics using stator current. J. Electr. Syst. 2007, 3, 213–226. [Google Scholar]
- Thomson, W.; Fenger, M. Current signature analysis to detect induction motor faults. IEEE Ind. Appl. Mag. 2001, 7, 26–34. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Peña, H.; Ramirez, C.; Manecha, E. Fallas en los motores eléctricos de inducción. Causas, diagnósticos y medidas preventivas. Energía y Computación 1998, 3, 71–72. [Google Scholar]
- Drozdowski, P.; Duda, A. Influence of magnetic saturation effects on the fault detection of induction motors. Arch. Electr. Eng. 2014, 63, 489–506. [Google Scholar] [CrossRef]
- Narwade, S.; Kulkarni, P.; Partil, C. Fault detection of induction motor using current and vibration monitoring. Int. J. Adv. Comput. Res. 2013, 3, 272. [Google Scholar]
- Kia, S.; Henao, H.; Capolino, G. A high-resolution frequency estimation method for three-phase induction machine fault detection. IEEE Trans. Ind. Electron. 2007, 54, 2305–2314. [Google Scholar] [CrossRef]
- Alarcón, C. Aportación al Mantenimiento Predictivo de Motores de Inducción Mediante Modernas Técnicas de Análisis de la Señal. Ph.D. Thesis, Institute of Energy Engineering, Universitat Politècnica de València, Valencia, Spain, 2012. [Google Scholar]
- Henao, H.; Capolino, G.; Fernandez-Cabanas, M.; Filippetti, F.; Bruzzese, C.; Strangas, E.; Pusca, R.; Estima, J.; Riera-Guasp, M.; Hedayati-Kia, S. Trends in fault diagnosis for electrical machines: A review of diagnostic techniques. IEEE Ind. Electron. Mag. 2014, 8, 31–42. [Google Scholar] [CrossRef]
- Duque-Perez, O.; Garcia-Escudero, L.A.; Morinigo-Sotelo, O.; Gardel, P.; Perez-Alonso, M. Analysis of fault signatures for the diagnosis of induction motors fed by voltage source inverters using ANOVA and additive models. Electr. Power Syst. Res. 2015, 121, 1–13. [Google Scholar] [CrossRef]
- Garcia-Escudero, L.; Duque-Perez, O.; Fernandez-Temprano, M.; Morinigo-Sotelo, D. Robust detection of incipient faults in VSI-fed induction motors using quality control charts. IEEE Trans. Ind. Appl. 2016, 53, 3076–3085. [Google Scholar] [CrossRef]
- Hernandez, L.; Baladron, C.; Aguiar, J.; Carro, B.; Sanchez-Esguevillas, A.; Lloret, J.; Massana, J. A survey on electric power demand forecasting: Future trends in smart grids, microgrids and smart buildings. IEEE Commun. Surv. Tutor. 2014, 16, 1460–1495. [Google Scholar] [CrossRef]
- Szabó, L.; Tóth, F.; Kovács, E.; Fekete, G. An overview on induction machine’s diagnosis methods. J. Comput. Sci. Control Syst. 2008, 1, 229–234. [Google Scholar]
- Soto, N.; De la Torre, F. ; Diagnóstico de problemas de asimetrías rotóricas en un motor de inducción de gran potencia. Ingeniería Mecánica 2007, 10, 47–50. [Google Scholar]
- Benbouzid, M.; Vieira, M.; Theys, C. Induction motors’ faults detection and localization using stator current advanced signal processing techniques. IEEE Trans. Power Electron. 1999, 14, 14–22. [Google Scholar] [CrossRef]
- Baranski, M.; Decner, A.; Polak, A. Selected diagnostic methods of electrical machines operating in industrial conditions. IEEE Trans. Dielectr. Electr. Insul. 2014, 21, 2047–2054. [Google Scholar] [CrossRef]
- Shnibha, R.; Albarbar, A.; Abouhnik, A.; Ibrahim, G. A more reliable method for monitoring the condition of three-phase induction motors based on their vibrations. ISRN Mech. Eng. 2012, 2012, 230–314. [Google Scholar] [CrossRef] [PubMed]
- Benbouzid, M.; Kliman, G. What stator current processing-based technique to use for induction motor rotor faults diagnosis? IEEE Trans. Energy Convers. 2003, 18, 238–244. [Google Scholar] [CrossRef]
- Filho, P.; Batista, F.; Pederiva, R.; Silva, V. Electrical fault diagnosis in induction motors using local extremes analysis. J. Q. Maint. Eng. 2016, 22, 321–332. [Google Scholar] [CrossRef]
- Villada, F.; Cadavid, D. Diagnostico de fallas en motores de inducción mediante la aplicación de redes neuronales artificiales. Inf. Tecnol. 2007, 18, 105–112. [Google Scholar] [CrossRef]
- Cusido, J.; Romeral, L.; Ortega, J.; Rosero, J.; Espinosa, A. Fault detection in induction machines using power spectral density in wavelet decomposition. IEEE Trans. Ind. Electron. 2008, 55, 633–643. [Google Scholar] [CrossRef]
- Allal, A.; Chetate, B. A new and best approach for early detection of rotor and stator faults in induction motors coupled to variable loads. Front. Energy 2016, 10, 176–191. [Google Scholar] [CrossRef]
- Kohler, J.; Sottile, J.; Trutt, F. Alternatives for assessing the electrical integrity of induction motors. IEEE Trans. Ind. Appl. 1992, 28, 1109–1117. [Google Scholar] [CrossRef]
- Filippetti, F.; Franceschini, G.; Tassoni, C.; Vas, P. AI techniques in induction machines diagnosis including the speed ripple effect. IEEE Trans. Ind. Appl. 1998, 34, 98–108. [Google Scholar] [CrossRef]
- Chow, T.; Shi, H. Induction machine fault diagnostic analysis with wavelet technique. IEEE Trans. Ind. Electron. 2004, 51, 558–565. [Google Scholar] [CrossRef]
- Aydın, I.; Karaköse, M.; Akın, E. Combined intelligent methods based on wireless sensor networks for condition monitoring and fault diagnosis. J. Intell. Manuf. 2005, 26, 717–729. [Google Scholar] [CrossRef]
- Ding, L. A New Paradigm of Knowledge Engineering by Soft Computing, 1st ed.; World Scientific Publishing: London, UK, 2001; pp. 1–5. ISBN 109810245173. [Google Scholar]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Time series trending for condition assessment and prognostics. J. Manuf. Technol. Manag. 2014, 25, 550–567. [Google Scholar] [CrossRef]
- Zhao, M.; Lin, J.; Xu, X.; Lei, Y. Tacholess envelope order analysis and its application to fault detection of rolling element bearings with varying speeds. Sensors 2013, 13, 10856–10875. [Google Scholar] [CrossRef] [PubMed]
- Arthur, N.; Penman, J. Induction machine condition monitoring with higher order spectra. IEEE Trans. Ind. Electron. 2000, 47, 1031–1041. [Google Scholar] [CrossRef]
- Eren, L.; Devaney, M. Bearing damage detection via wavelet packet decomposition of the stator current. IEEE Trans. Instrum. Meas. 2004, 53, 431–436. [Google Scholar] [CrossRef]
- Barbour, A.; Thomson, W. Finite element study of rotor slot designs with respect to current monitoring for detecting static airgap eccentricity in squirrel-cage induction motors. In Proceedings of the Conference Record of the 1997 IEEE Industry Application Conference, New Orleans, LA, USA, 5–9 October 1997; pp. 112–119. [Google Scholar]
- Zhang, Z.; Wang, Y.; Wang, K. Fault diagnosis and prognosis using wavelet packet decomposition, Fourier transform and artificial neural network. J. Intell. Manuf. 2013, 24, 1213–1227. [Google Scholar] [CrossRef]
- Ren, L.; Lv, W.; Jiang, S.; Xiao, Y. Fault diagnosis using a joint model based on sparse representation and SVM. IEEE Trans. Instrum. Meas. 2016, 65, 2313–2320. [Google Scholar] [CrossRef]
- Son, J.; Ahn, B.; Ha, J.; Choi, B. An availability of MEMS-based accelerometers nd current sensors in machinery fault diagnosis. Measurement 2016, 94, 680–691. [Google Scholar] [CrossRef]
- Camarena-Martinez, D.; Valtierra-Rodriguez, M.; Garcia-Perez, A.; Osornio-Rios, R.; Romero-Troncoso, R. Empirical mode decomposition and neural networks on FPGA for fault diagnosis in induction motors. Sci. World J. 2014, 2014, 908140. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A. Diagnostics of DC and Induction Motors Based on the Analysis of Acoustic Signals. Meas. Sci. Rev. 2014, 14, 257–262. [Google Scholar] [CrossRef]
- Li, B.; Chow, M.; Tipsuwan, Y.; Hung, J. Neural-network-based motor rolling bearing fault diagnosis. IEEE Trans. Ind. Electron. 2000, 47, 1060–1069. [Google Scholar] [CrossRef]
- Ruiz-Gonzalez, R.; Gomez-Gil, J.; Martínez-Martínez, V. An SVM-Based classifier for estimating the state of various rotating components in agro-industrial machinery with a vibration signal acquired from a single point on the machine chassis. Sensors 2014, 14, 20713–20735. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Chong, K. Induction machine condition monitoring using neural network modeling. IEEE Trans. Ind. Electron. 2007, 54, 241–249. [Google Scholar] [CrossRef]
- Chudasama, K.; Shah, S. Induction motor relaying scheme for external faults detection and classification using subtractive clustering based sugeno fuzzy inference system. Electr. Power Compon. Syst. 2016, 44, 1149–1162. [Google Scholar] [CrossRef]
- Dash, R.; Subudhi, B. Stator inter-turn fault detection of an induction motor using neuro-fuzzy techniques. Arch. Control Sci. 2010, 20, 363–376. [Google Scholar] [CrossRef]
- Mortada, M.; Yacout, S.; Lakis, A. Diagnosis of rotor bearings using logical analysis of data. J. Q. Maint. Eng. 2011, 17, 371–397. [Google Scholar] [CrossRef]
- Ranga, C.; Chandel, A. Advanced tool based condition monitoring of induction machines by using labVIEW—A review. In Proceedings of the IEEE UP Section Conference of Electical Computer and. Electronics (UPCON), Allahabad, India, 4–6 December 2015; pp. 1–6. [Google Scholar]
- Zilouchian, A.; Jamshidi, M. Intelleging Control Systems Using Soft Computing Methodologies, 1st ed.; CRC Press: Boca Raton, FL, USA, 2000; ISBN 0-8493-1875-0. [Google Scholar]
- Kobbacy, K.; Vadera, S. A survey of AI in operations management from 2005 to 2009. J. Manuf. Technol. Manag. 2011, 22, 706–733. [Google Scholar] [CrossRef]
- Pracash, A. Perfomance Monitoring of Wind Turbines—A Data Mining Approach. Ph.D. Thesis, Graduate College, Iowa University, Iowa, IA, USA, 2012. [Google Scholar]
- Cardoso, A.; Saraiva, E. Computer-aided detection of airgap eccentricity in operating three-phase induction motors by Park’s vector approach. IEEE Trans. Ind. Appl. 1993, 29, 897–901. [Google Scholar] [CrossRef]
- Kyusung, K.; Parlos, A. Induction motor fault diagnosis based on neuropredictors and wavelet signal processing. IEEE/ASME Trans. Mech. 2002, 7, 201–219. [Google Scholar] [CrossRef]
- Khireddine, M.; Slimane, N.; Abdessemed, Y.; Makhloufi, M. Fault Detection and Diagnosis in Induction Motor Using Artificial Intelligence Technique. MATEC Web of Conferences. 2014, Volume 16. Available online: https://www.matec-conferences.org/articles/matecconf/pdf/2014/07/matecconf_csndd2014_10004.pdf (accessed on 16 February 2017).
- Kumar, E.; Chaturvedi, S.; Deshpande, A. Maintenance of industrial equipment. Int. J. Q. Reliab. Manag. 2009, 26, 196–211. [Google Scholar] [CrossRef]
- Moosavian, M.; Ahmadi, H.; Sakhaei, B.; Labbafi, R. Support vector machine and K-nearest neighbour for unbalanced fault detection. J. Q. Maint. Eng. 2014, 20, 65–75. [Google Scholar] [CrossRef]
- Jayaswal, P.; Verma, S.; Wadhwani, A. Application of ANN, fuzzy logic and wavelet transform in machine fault diagnosis using vibration signal analysis. J. Q. Maint. Eng. 2010, 16, 190–213. [Google Scholar] [CrossRef]
- Jalali, M.; Farokhzad, S.; Abad, A. Vibration based fault detection of alternator by fast fourier transform and adaptive neuro fuzzy inference system. J. Curr. Res. Sci. 2013, 1, 221–226. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental | Operations | Equipment | Human | Electrical Power |
|---|---|---|---|---|
| Temperature | Vibration | Aging | Bad selection of electric motor | Transients due to: Short circuit Fluctuations Resonance Transfers Reconnections Capacitors Insulation Drivers |
| Moisture | Overload | Quality | Bad use | Voltage drop |
| Rust | Excessive starts | Design defects | Lack of maintenance | Voltage low |
| Ventilation | Alignment | Manufacturing defects | Improper maintenance or repairs | Voltage unbalance |
| Pollution | Resonance of the System | Inappropriate or poor quality parts | Harmonics | |
| Strange Objects | Shaft currents Stator-rotor Friction Partial Discharge (PD) | Lubrication | Defective electrical installation |
| ELECTRICAL | MECHANICAL | |||
|---|---|---|---|---|
| STATOR | Factors for failures | Failures | Failures | Factors for failures |
| Vibration of coils | Radial and tangential movement Destruction of winding fastening Insulation damage Short circuit | Electromagnetic noise and vibration Damage to core due to friction with the stator Destruction of insulation and wedges overheating | Rotor eccentricity | |
| Insulation failure | Short circuit between: turns coils phases phase and ground | Loosening of the core Loss of interlaminar insulation Destruction of insulation Destruction of winding fastening Decreased performance | Overheating | |
| Tracking | Insulation perforation and destruction Circuit formation between winding and ground Discharge of currents to ground Ground fault | Core damage during assembly Core damage during assembly or rewinding Applying heat excessive | Maintenance | |
| Transients | Insulation destruction | Overheating | Lack of ventilation | |
| ROTOR | Vibration of coils | Radial and tangential movement Destruction of winding fastening Insulation damage Short circuit | Shaft breakage Bearing, fan and couplings failure Friction with the stator Centrifugal and thermal stresses Stresses in the blades and bars | Dynamic Failures |
| Insulation failure | Short circuit between: turns coils phases phase and ground | Electromagnetic noise and vibration Damage to core due to friction with the stator Bearing failure Shaft currents Production of sparks by discharges | Static and dynamic eccentricity | |
| Electromagnetic faults | Displacements accompanied by deflection and stresses of the bars | Eccentricity, twist, break, residual stresses, overload, damage during repairs or mounts | Shaft | |
| Magnetic faults | Broken bars Noise Vibration Shaft twisting Bearing failure Friction with the stator | Loosening core Loss of interlaminar insulation Bearing failure | Overheating | |
| Overheating | Lack of ventilation | |||
| Eccentricity electromagnetic noise and vibration Damage to core due to friction with the stator Shaft currents Production of sparks by discharges | Bearing | |||
| Stresses | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mechanical | Electrical | Magnetic | Thermal | Environmental | Residual | Dynamic | Vibration or Shakes | Dynamic and Static Charges | Others | ||
| Stator Winding | Friction between coils | Degradation of the dielectric | Aging | Humidity | |||||||
| Rotor strikes | Crown effect | Voltage variation | Abrasion | ||||||||
| Rotor defects | Transient | Load | Chemicals | ||||||||
| Impact of objects | Ventilation | Ventilation | |||||||||
| Environment | Temperature | ||||||||||
| Effects | Rotor | Cast Iron Impurities | Noise | Thermal overload | Humidity | Concentration of stresses | Vibration | Poor design or Manufacturing defects | |||
| Destruction of sheets | Circulation of currents | Thermal imbalance | Abrasion | Friction | Transient torques | ||||||
| Fatigue | Vibrations | Excessive rotor losses | Chemicals | Unequal stresses on bars | High speeds | Core or bars wear | |||||
| Misaligned | Core saturation | Sparks | Poor ventilation | Cyclic stresses | Rotation direction wrong | ||||||
| Material deviations | Hot spots | Overheating | Centrifugal forces | ||||||||
| Incorrect settings | Pollution | ||||||||||
| Effects | Bearings | Loss of slack | Misaligned rotor | Friction | Condensation | Vibration | Radial | ||||
| Misaligned | Electrostatic charge | Lubrication | Materials foreign | Axial | |||||||
| Bearing housing wear | Electrostatic coupling | Environment | Overheating | Coupling equipment | Preload | ||||||
| Frequency variations | Ventilation lack | ||||||||||
| Shaft | Overload and flexion | Lateral loads | Temperature gradients | Corrosion | Cyclic loads | Manufacturing processes | |||||
| Torsional load | Moisture | Shakes | |||||||||
| Axial loads | Gap | Erosion | Repair processes | ||||||||
| Wear | |||||||||||
| REFERENCES | [21] | [23] | [24] | [25] | [26] | [22] | [27] | [28] | [29] | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IEEE-IAS | EPRI | Allianz | |||||||||
| Bearings | 41 | 69 | 44 | 41 | 13 | 40–50 | 44 | 51 | 40 | 40–50 | 42 |
| Stator | 23 | 21 | 26 | 36 | 66 | 28–43 | 26 | 38 | 30–40 | 31 | |
| Inter-turn short circuits | 26 | ||||||||||
| Rotor | 10 | 8 | 9 | 13 | 5–10 | 10 | |||||
| Broken bars/end ring | 7 | 8 | 5 | 5–10 | 9 | ||||||
| Shaft/coupling | 3 | 2 | |||||||||
| Unknown causes | 10 | ||||||||||
| External causes | 16 | ||||||||||
| Others | 12 | 22 | 14 | 8 | 12 | 22 | 12 | 12 | |||
| Failure | % |
|---|---|
| Failure Initiator | |
| Transient overvoltage | 1.5 |
| Overheating | 3.2 |
| Other insulation breakdown | 12.3 |
| Mechanical breakage | 33.1 |
| Electrical fault or malfunction | 7.6 |
| Stalled motor | 0.9 |
| Other | 31.4 |
| Failure Contributor | |
| Persistent overloading | 4.2 |
| High ambient temperature | 3.0 |
| Abnormal moisture | 5.8 |
| Abnormal voltage | 1.5 |
| Abnormal frequency | 0.6 |
| High vibration | 15.5 |
| Aggressive chemicals | 4.2 |
| Poor lubrication | 15.2 |
| Poor ventilation or cooling | 3.9 |
| Normal deterioration from age | 26.4 |
| Other | 19.7 |
| Underlying Failure Cause | |
| Defective component | 20.1 |
| Poor installation/testing | 12,9 |
| Inadequate maintenance | 21.4 |
| Improper operation | 3.6 |
| Improper handling/shipping | 0.6 |
| Inadequate physical protection | 6.1 |
| Inadequate electrical protection | 5.8 |
| Personnel error | 6.8 |
| Outside agency other than personnel | 3.9 |
| Motor-driven equipment mismatch | 4.9 |
| Other | 13.9 |
| Bearing Related | % |
|---|---|
| Sleeve bearings | 16 |
| Antifriction bearings | 8 |
| Seals | 6 |
| Thrust bearing | 5 |
| Oil leakage | 3 |
| Other | 0.9 |
| Total | 41 |
| Stator Related | |
| Ground insulation | 23 |
| Turn insulation | 4 |
| Bracing | 3 |
| Wedges | 1 |
| Frame | 1 |
| Core | 1 |
| Other | 4 |
| Total | 37 |
| Rotor Related | |
| Cage | 5 |
| Shaft | 2 |
| Core | 1 |
| Other | 2 |
| Total | 10 |
| Applied Techniques | (Data-Based Approach) Data-Driven Techniques | Prior Knowledge-Based Techniques (Model-Based Approach) | Hybrid Models |
|---|---|---|---|
| Fundamentals | Empirical models constructed primarily from the process history data | Relies on an explicit model of the process primarily based on first principles, input-output or state space models | Amalgamation of the data-based and model-based approaches |
| Classification | Statistical Techniques Artificial Intelligence | Parameter-based estimation method | |
| Technique based (artificial neural network and fuzzy logic) | Observer-based method | ||
| Artificial Neural Network (ANN)-fuzzy logic | Based on parity relations |
| Characteristics | Data-Based Approach | Prior Knowledge-Based or Model-Based Approach | |||
|---|---|---|---|---|---|
| Statistical Techniques | AI | Parameter Estimation | Observer Based | Parity Relations | |
| Ease of development | Easy | Easy | Relatively tough | Tough | Tough |
| Diagnostic ability | Satisfactory | Very Good | Good | Good | Good |
| Detection speed | Quick | Quick | Quick for abrupt faults, but relatively slow for developing faults | Quick for abrupt faults | Quick for abrupt faults |
| Robustness to noise | Good | Very good | Poor | Poor | Poor |
| Generalization capability | Poor | Poor | Good | Good | Good |
| Handling of nonlinearity | Good | Excellent | Satisfactory | Satisfactory | Satisfactory |
| Failure types addressed | Mainly process component or equipment failures | Mainly actuator and sensor failures | |||
| Industrial applicability | Predominantly process industries | Varied applications | Predominantly mechanical and airspace industries | ||
| Test | Description | Effectiveness | Test Precautions/Considerations |
|---|---|---|---|
| AC high potential | Overvoltage test applied from conductor-to-ground. | Pass/Fail Test; not effective for trending. | Potentially destructive. |
| Capacitance | AC test to measure insulation capacitance line-to-ground. | Effective in manufacturing; possibly effective for trending. | Effective on single coils during manufacturing of medium-voltage machines. |
| Core loss (loop) | Test for shorted stator core laminations. | Pass/Fail Test; not typically effective for trending, although may be used for trending under controlled conditions. | Be prepared to stop test abruptly if core damage is suspected. |
| DC high potential | Overvoltage test applied line to ground test, measures leakage current plus charging current. | Effective for trending and as pass/fail. | DC high potential test should only be undertaken after passing the PI test. |
| Dielectric absorption | Ratio of the 60-s IR reading to the 30-s IR reading. | Effective for trending | |
| Dissipation factor and power factor | AC test measuring dissipation-capacitance line-to-ground. | Effective on single coils during manufacturing of medium-voltage machines; possibly effective for trending. | |
| Grease analysis | Appearance, smell, grit, content of grease sample grease lubricated machine bearings. | Effective for trending. | |
| Growler | Tests of rotor core and squirrel cage of disassembled machine by introducing an external magnetic field, and monitoring temperatures, magnetic patterns or current patterns of the rotor. | Pass/fail test; not effective for trending. | |
| Insulation resistance | Measures resistance of insulation between conductor and ground. | Effective for trending. | Temperature correction required for trending. Adequate scale range required. |
| Oil analysis | Analysis of oil for lubricant characteristics and foreign particle concentration for oil-lubricated machine bearings. | Effective for trending. | |
| Partial discharge | AC test that measures partial discharge (corona) line-to-ground. | Requires experienced operator; effective for trending with some technologies. | |
| Phase angle | Timed measurement of voltage and current angle in degrees. | Effective for trending. | |
| Phase balance (Inductance and Impedance) | AC frequency test to measure stator line-to-line inductance or impedance balance. | Effective for trending. | Correct for winding temperature and rotor position. |
| Polarization index | Ratio of ten-minute IR to one-minute IR. | Effective for trending. | Should have adequate scale range. Note: form-wound coils only. |
| Single-phase rotor test | Monitors the AC current level while the machine is single- phased at lower voltage level, while the shaft is rotated manually. | Pass/fail. | WARNING: possible hazard to operator; risk of single-phase start. |
| Broken Bars | Bearings | Eccentricity | Unbalance Shaft | Winding Short | Rotor Asymmetry | Voltage Unbalance | Insulation between Turns | ||
|---|---|---|---|---|---|---|---|---|---|
| Signal | Applied Technique | ||||||||
| Current | Fast Fourier Transform (FFT) | [23,24,34,37,44,45] | [23,24,37,40] | [24,31,46] | [23,24,33] | [37] | [47] | ||
| Short Time Fast Fourier Transform (STFT) | [48] | [48] | [48] | ||||||
| Music, Root music | [25,37,49] | [23,25,49] | [23] | [49] | [25] | ||||
| Wavelets | [50] | [51] | |||||||
| Time Frequency Representation (TFR) Mahalanobis Distance | [18] | [18] | [18] | ||||||
| Wavelet Transform Decomposition Wavelet Power Spectral Density | [52] | [52] | |||||||
| Park’s Vector Square Modulus (PVSM) and Park-Hilbert (P-H) | [53] | [54] | [53] | ||||||
| Input Power | [12] | [12] | [12] | [12] | |||||
| Finite Element | [55] | ||||||||
| Current (drivers) | Statistical analysis based on additive model | [40,41] | [42] | [42] | |||||
| Wavelet Packet Decomposition (WPD) | [56] | [56] | [56] | ||||||
| External radial flux | Empirical Demodulation (ED) Hilbert Transform (HT) | [40,44] | [27,40] | [27] | |||||
| Vibration | MCSA (FFT) | [45] | [24,47,49] | [49] | [27,53] | [27,53] | |||
| Fault Frequency Highlighting (FFH) | [53] | [53] | |||||||
| Gaussian Mixture Models and Bayesian classification | [57] | ||||||||
| Wavelet (Gaussian envelope oscillation) | [58] | [58] | [58] | [58] | |||||
| Empirical Mode Decomposition (EMD) Time series trending for condition assessment and prognostics | [59] | ||||||||
| Envelope Order Spectrum (EOS) tacholess envelope order analysis technique | [60] | ||||||||
| Higher Order Spectra (HOS) | [61] | [61] | [61] | ||||||
| Zero sequence voltage | [33,49] | [36] | [36] | [62] | |||||
| Thermal | [24] | [24] | |||||||
| Acoustic | [24] | ||||||||
| Torque variations | [44] | ||||||||
| Equivalent circuit | [63] |
| Stage | Equipment | References |
|---|---|---|
| Current sensor | Fluke Hall Effect probe | [41,42] |
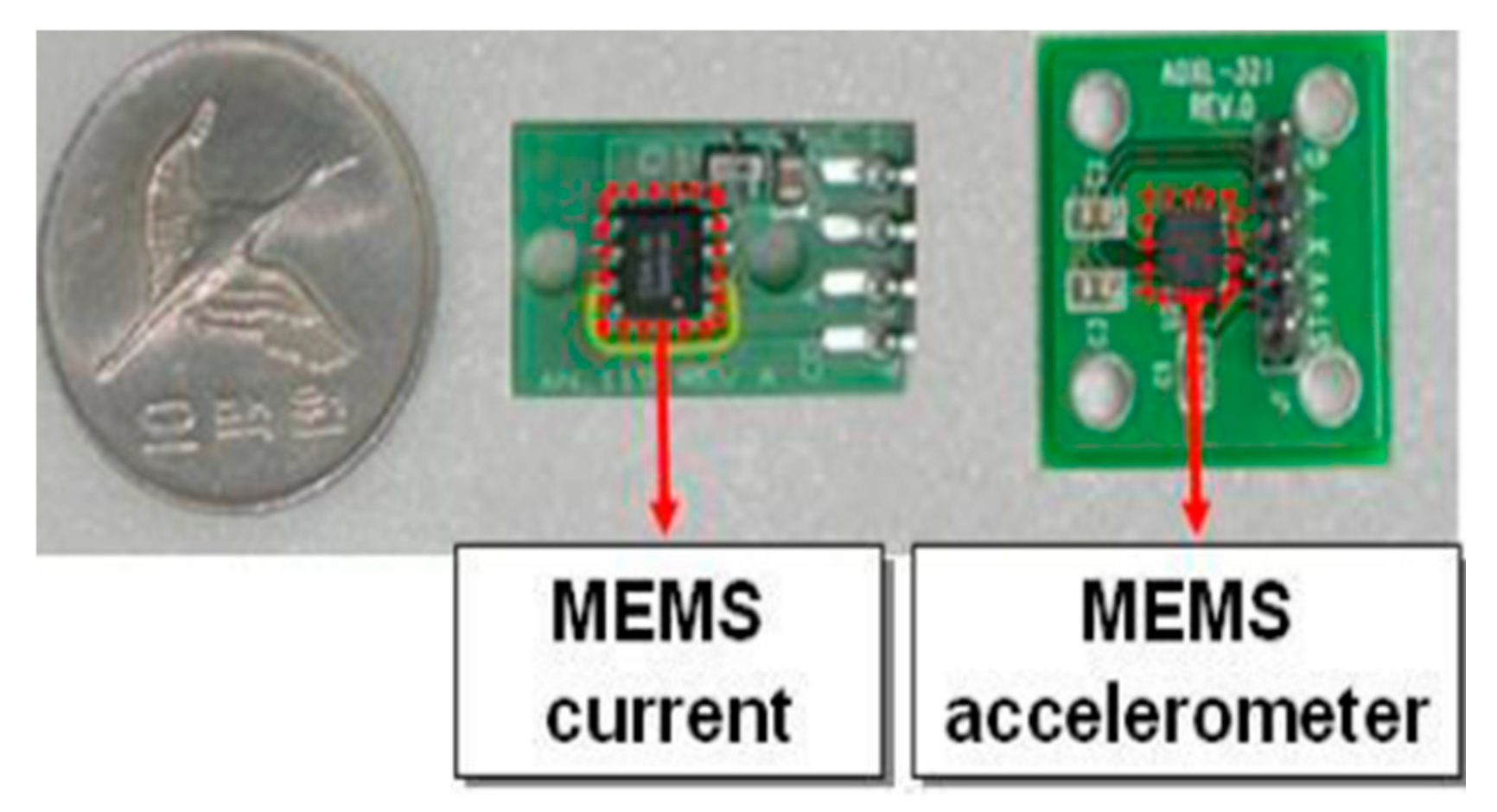
| Micro electromechanical systems (MEMS) model CSA-1V | [39,66] | |
| Wireless XBEE | [57] | |
| 3035B DYTRAN accelerometers | [29] | |
| Current Clamp | [67] | |
| Vibration sensor | MEMS model LIS3L02AS4 | [25] |
| DeltaTron accelerometer type 4517 | [26] | |
| Wireless XBEE | [57] | |
| Kistler: Type 8702B100 | [64] | |
| Sound sensor | OLYMPUS WS 200S | [68] |
| Acquisition signal | PCI-6250 M DAQ NI | [37,41,52,64,69] |
| NI-6251 | [26,41] | |
| NI-9234 | [70] | |
| AT-MIO-16D data A/D card | [56] | |
| DSP 56F8357 | [51] | |
| 13-channel IO Tech | [71] | |
| ARCOM acquisition board | [68] | |
| MEMS model ADS7841 | [25] | |
| FPGA-based System | [67] | |
| Accessories for acquiring signals | NI BNC-2110 | [64] |
| NI cDAQ-9172 | [70] | |
| Signal analysis | MATLAB and LabVIEW | [41,42,64,69] |
| MATLAB | [32,37,41,51,53,59,67,69,70,72,73,74] | |
| LabVIEW | [44] | |
| NI Sound and Vibration Assistant software | [70] | |
| NI DAQ Ware 4.5 | [56] |
| Motor Condition | Amplitude Difference (dB) |
|---|---|
| Healthy | 54–60 |
| Acceptable | 48–54 |
| Half section broken bar | 42–48 |
| One broken bar | 36–42 |
| Many broken bar | 30–36 |
| Severe problems | <30 |
| Signal Components | |
|---|---|
| Failure | Bandwidth (Hz) |
|---|---|
| Broken bars | 45–75 |
| Defective Bearings (current signal) | 104–124 |
| Defective Bearings (vibration signal) | 164–184 |
| Phase Unbalance | 45–65 |
| Techniques | Emulated Phenomenon |
|---|---|
| ANN | Learning and classifying patterns like the human brain |
| Fuzzy Logic | How the brain handles inaccurate information and makes inferences Stores the experience in a linguistic form |
| Fuzzy Sets | How the brain handles inaccurate and accurate information. |
| Neuro-Fuzzy System (Hybrid Systems) | Learning and classifying patterns like the human brain, making inferences based on inaccurate information and storing experience in a linguistic form |
| Genetic Algorithm | Crossing and evolution of individuals Selection of the best adapted Chromosomes, Genes |
| Support Vector Machine (SVM) | Based on statistical learning theory |
| K-nearest neighbors (KNN) | Estimates the probability that an element belongs to a given set |
| Data Mining | Techniques to process large databases to find patterns of trends that explain their behavior |
| Case-Based Reasoning (CBR) | Troubleshooting based on similar previous cases |
| Expert Systems | Computer system that performs inferences based on stored data and received information |
| Faults | |||||||||
| Signal | Applied Techniques | Broken Bars | Bearings | Eccentricity | Unbalance | Windings Short | Voltage Unbalance | Degradation of Components Prediction | |
| Current | ANN | Feed Forward Propagation | [32,79] | [32] | [32] | [32] | |||
| Recurrent Dynamic | [80] | [80] | [80] | ||||||
| Feed Forward Propagation Adaptive linear network | [67] | [67] | [67] | ||||||
| Negative sequence current | [51] | ||||||||
| Fuzzy logic | [57,81] | [57,81] | |||||||
| Hybrid systems | Feed-forward MLP ANFIS | [73] | |||||||
| Fuzzy sets | [82] | [82] | [82] | [82] | |||||
| Vibration | ANN | Back propagation | [80] | [64] | |||||
| MLP | [71] | ||||||||
| SVM | [48] | [48] | [48] | ||||||
| Hilbert-Huangttransform (HHT), SVR | [29] | ||||||||
| Sparse representation | [65] | ||||||||
| wavelet packet decomposition | [77] | ||||||||
| KNN | [83] | ||||||||
| Hybrid Systems | Left Right type fuzzy numbers ANN Wavelet decomposition Fuzzy Logic | [84] | |||||||
| ANFIS | [85] | [85] | |||||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merizalde, Y.; Hernández-Callejo, L.; Duque-Perez, O. State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies 2017, 10, 1056. https://doi.org/10.3390/en10071056
Merizalde Y, Hernández-Callejo L, Duque-Perez O. State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies. 2017; 10(7):1056. https://doi.org/10.3390/en10071056
Chicago/Turabian StyleMerizalde, Yuri, Luis Hernández-Callejo, and Oscar Duque-Perez. 2017. "State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors" Energies 10, no. 7: 1056. https://doi.org/10.3390/en10071056
APA StyleMerizalde, Y., Hernández-Callejo, L., & Duque-Perez, O. (2017). State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies, 10(7), 1056. https://doi.org/10.3390/en10071056