Modeling Noise Sources and Propagation in External Gear Pumps



Abstract
:1. Introduction
2. Vibro-Acoustic Model of External Gear Pump
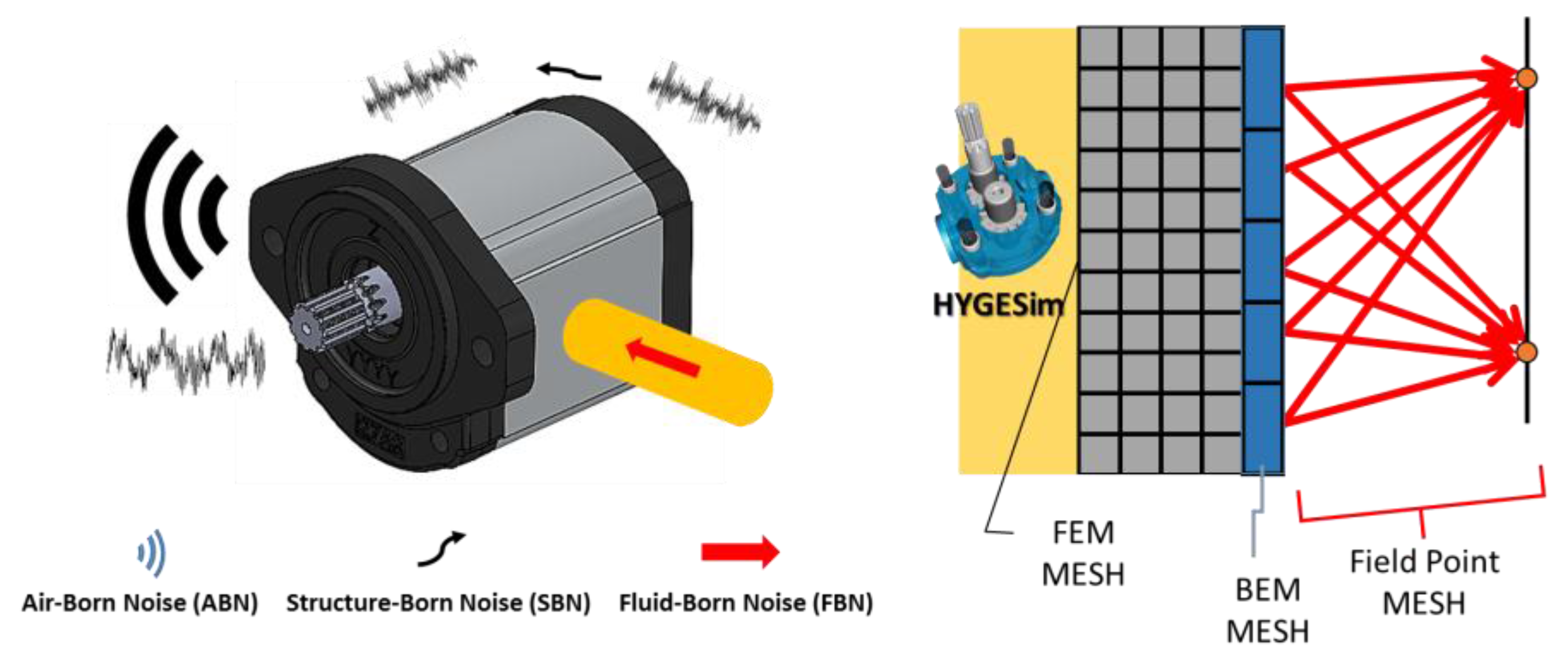
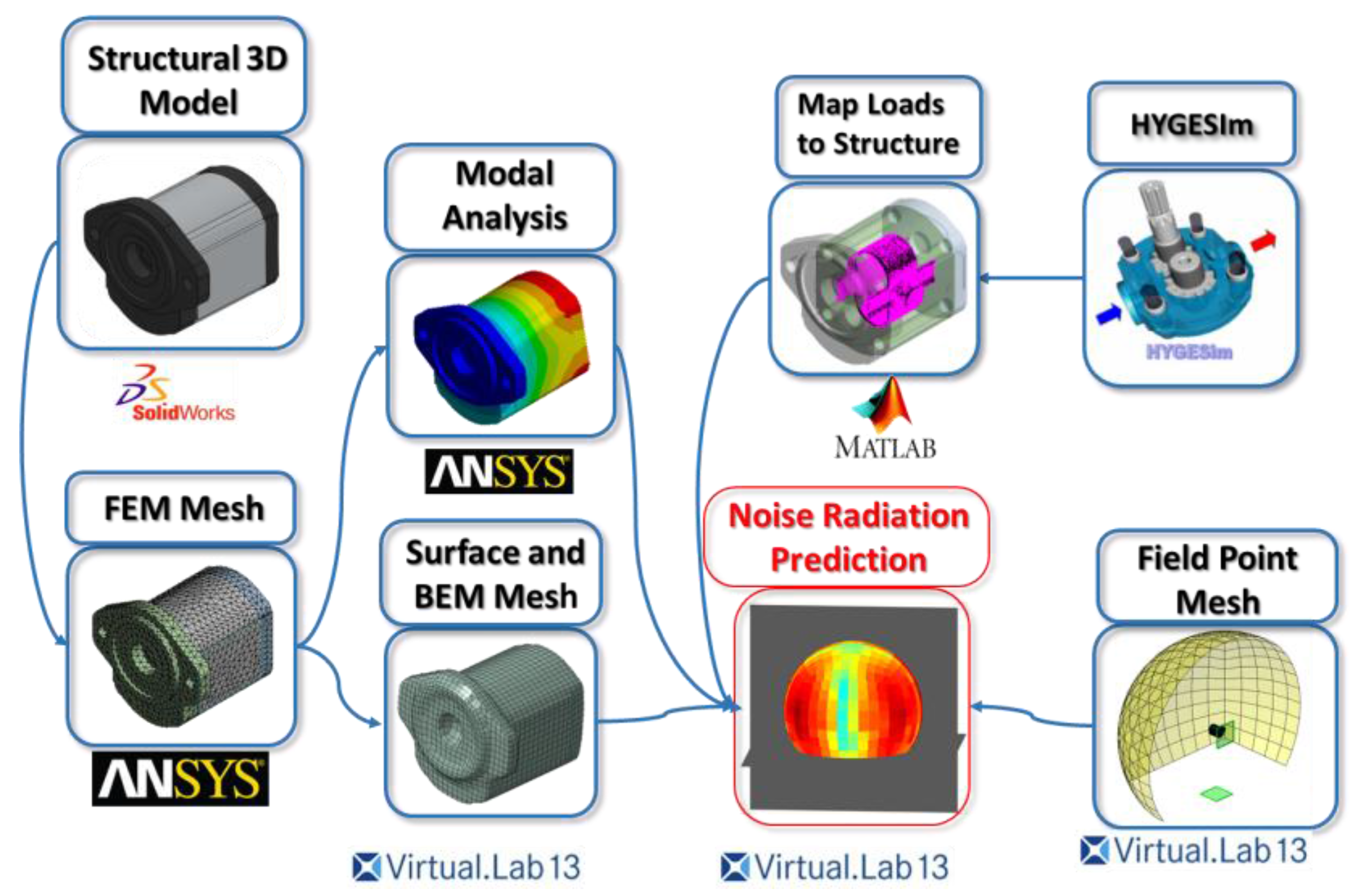
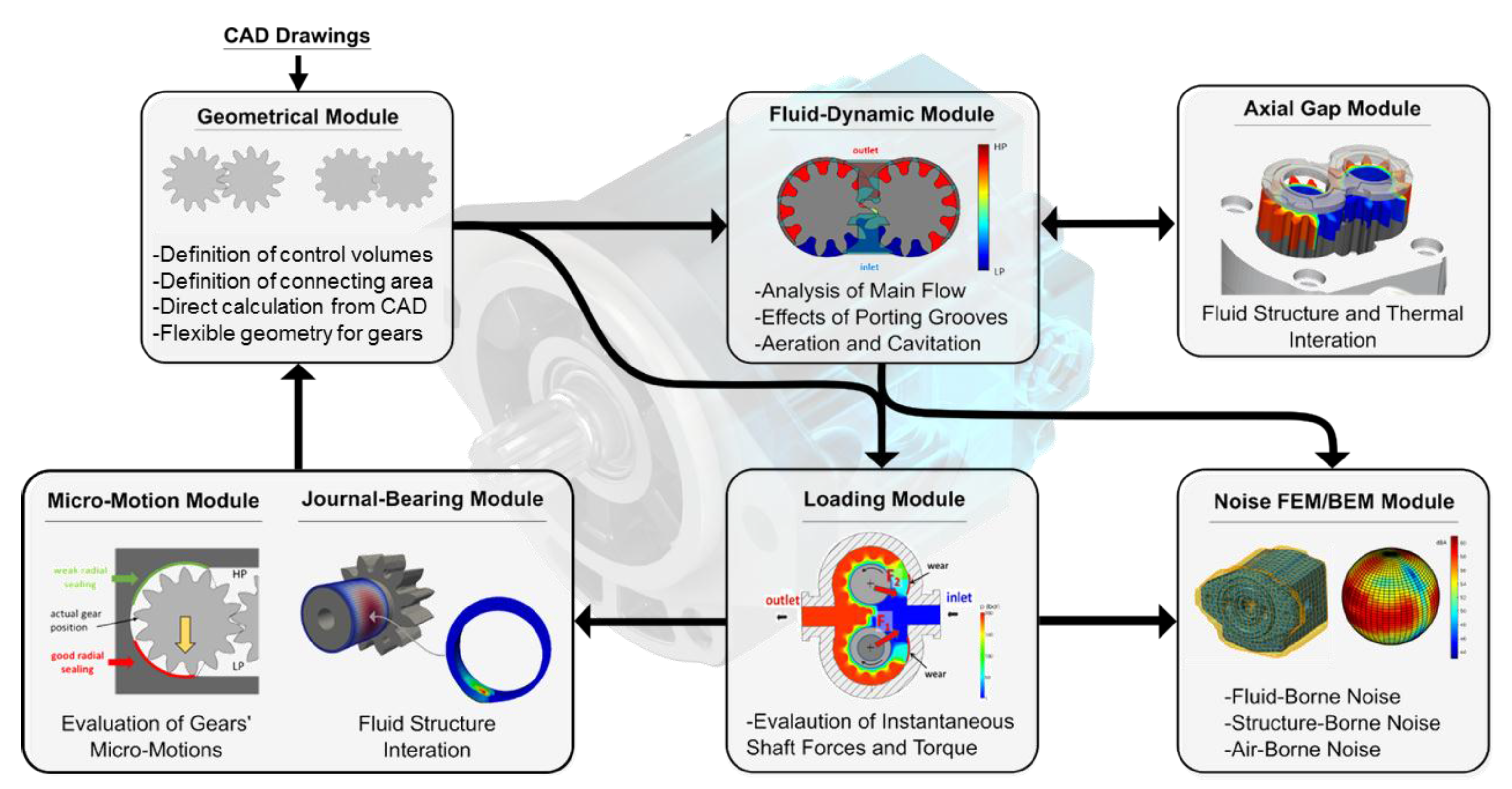
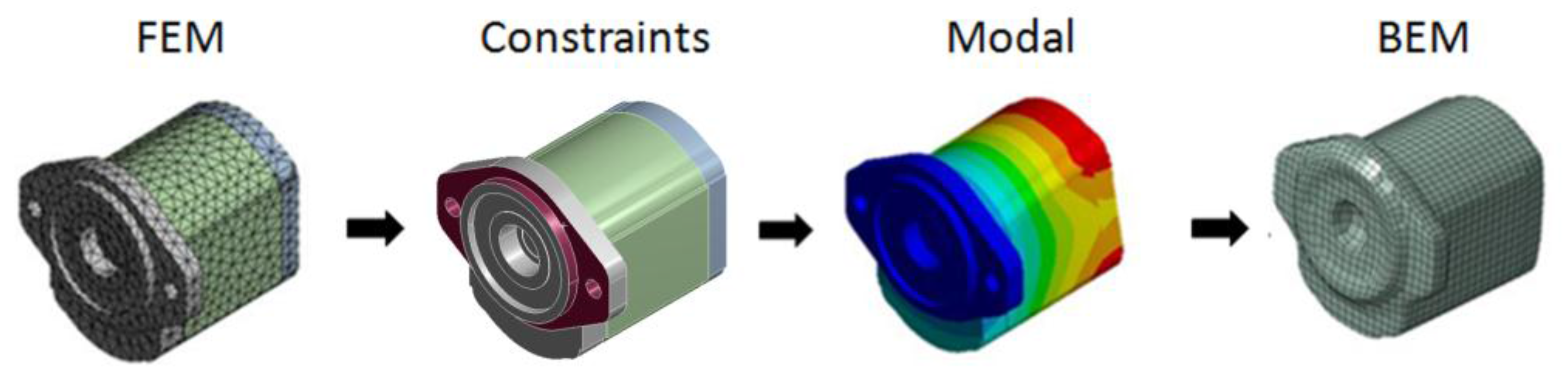
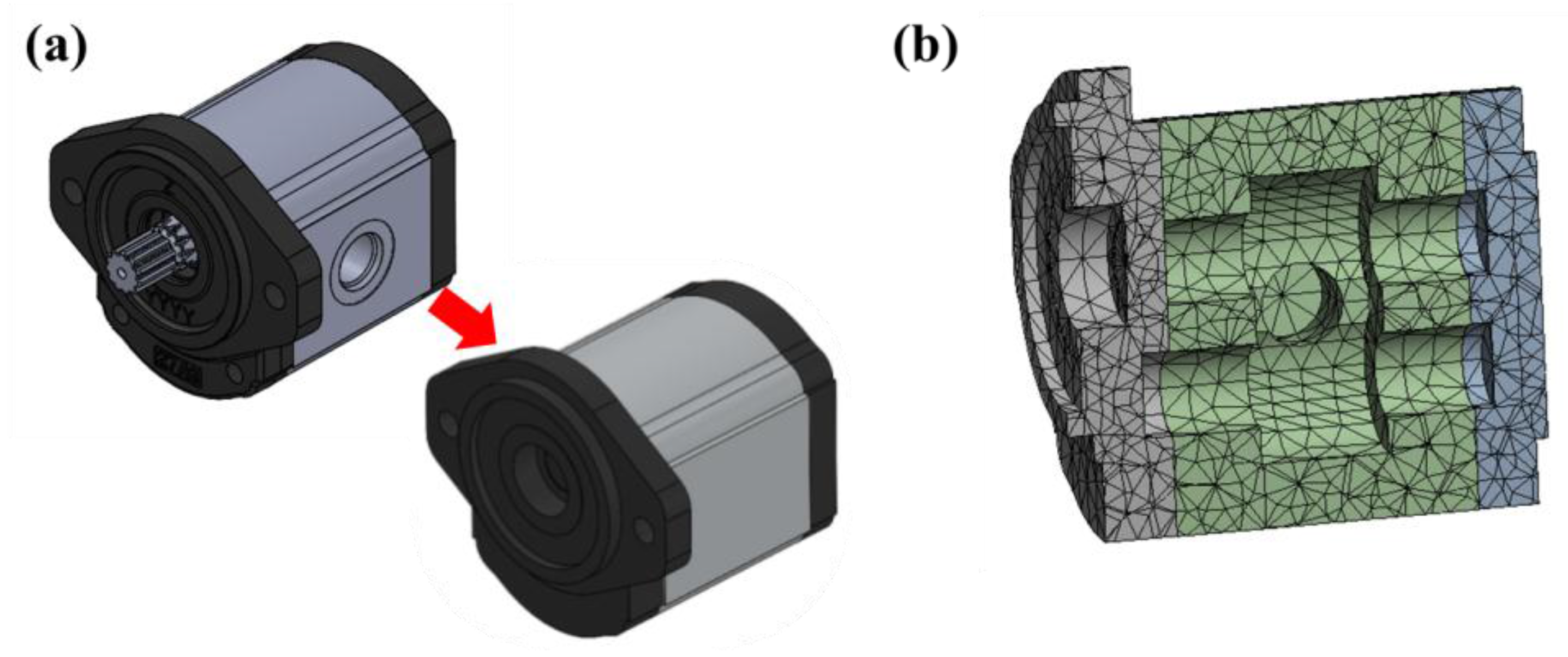
2.1. Modeling Approach
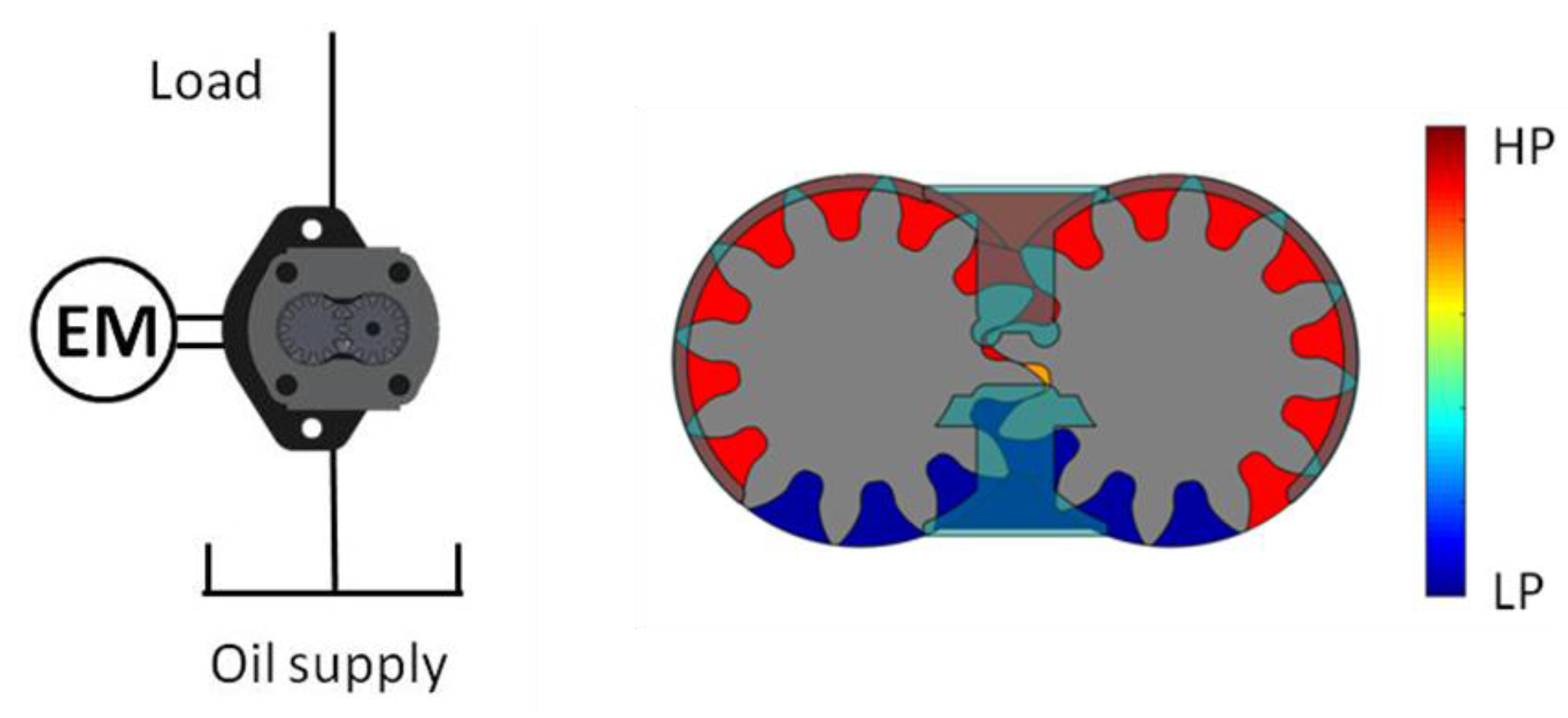
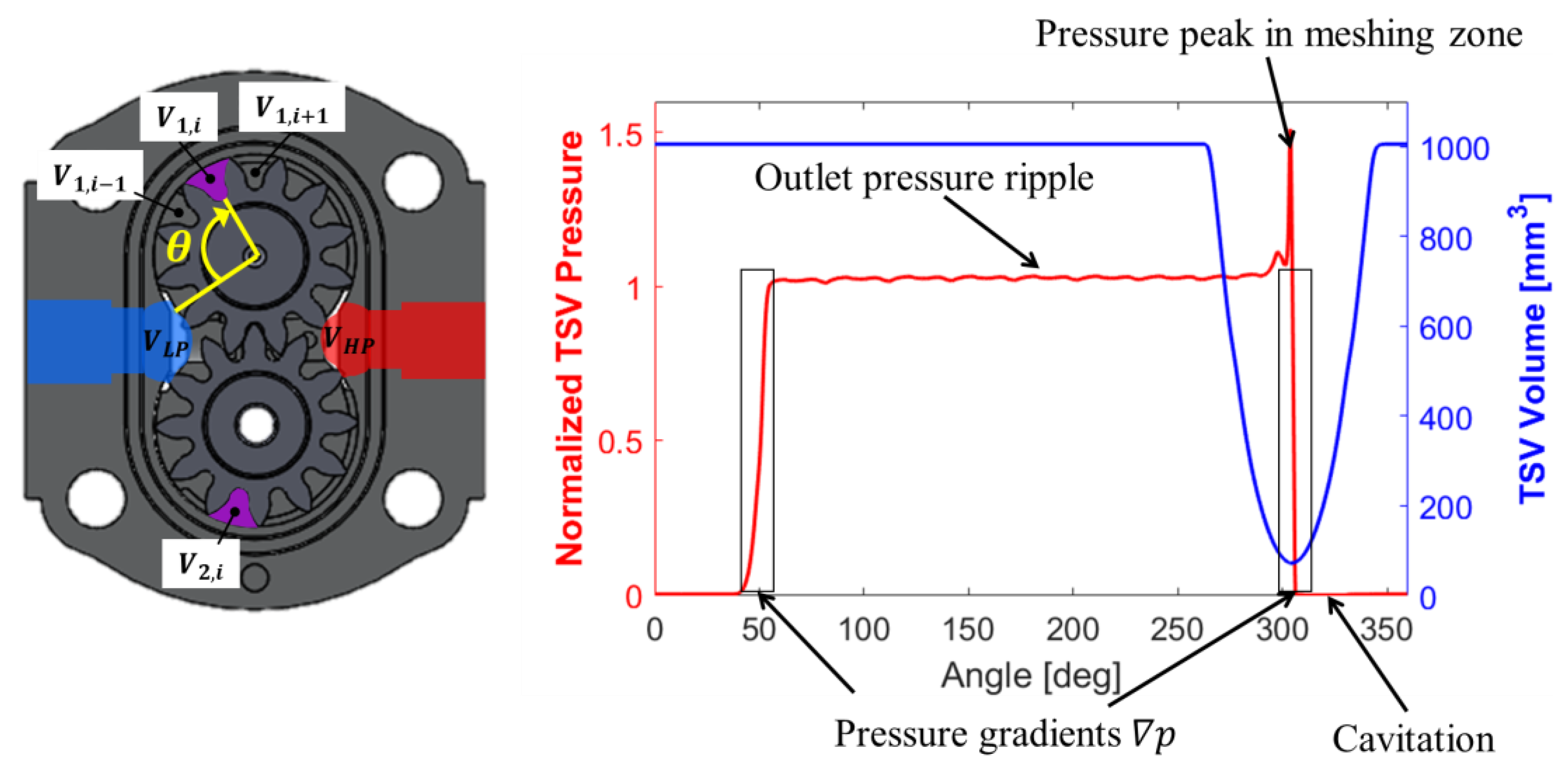
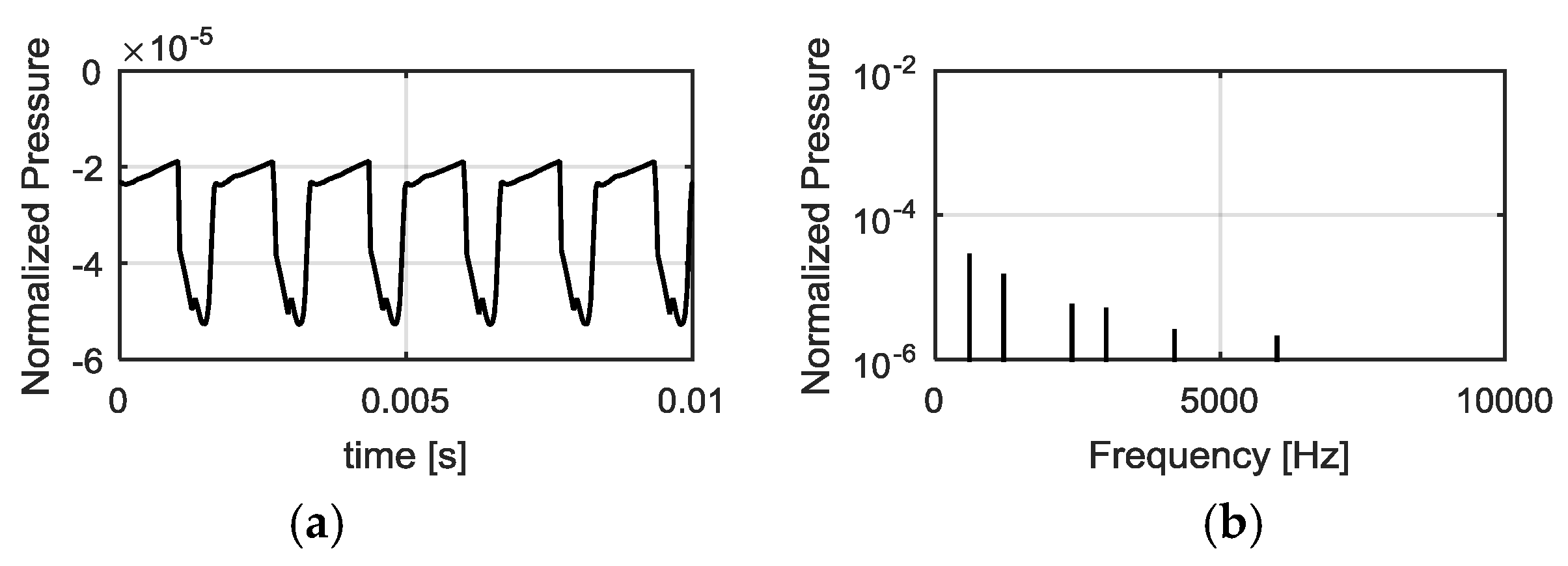
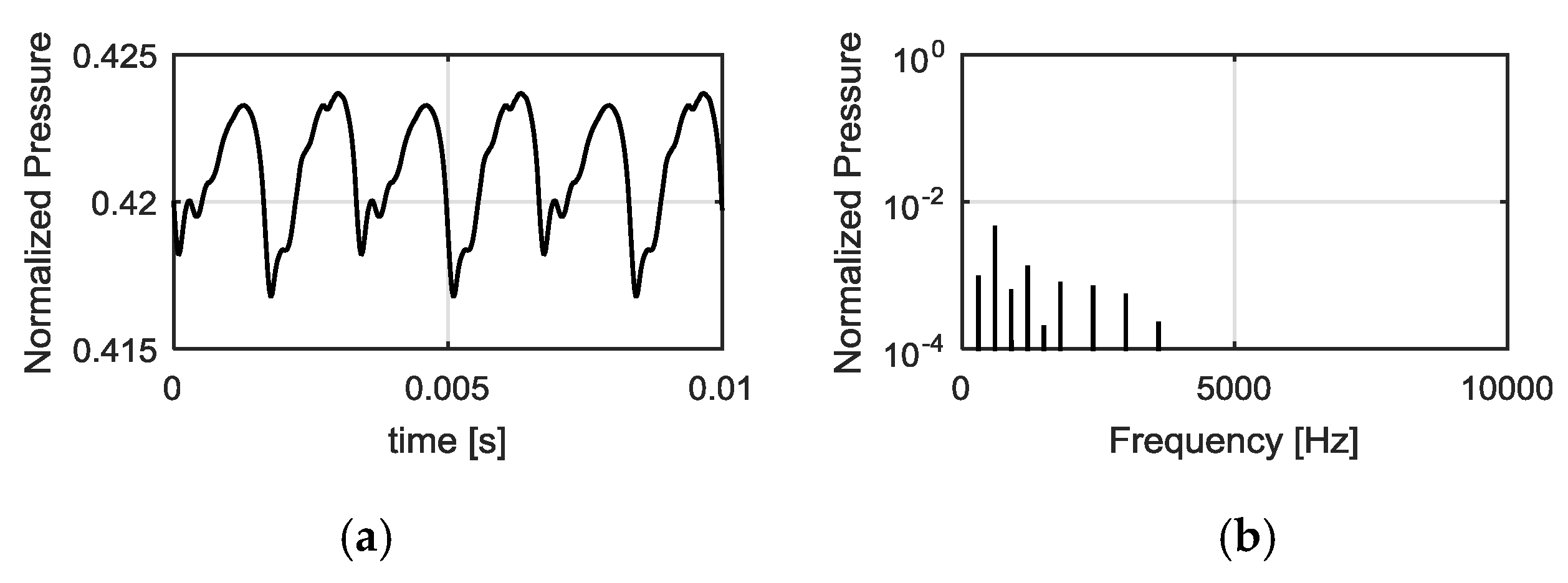
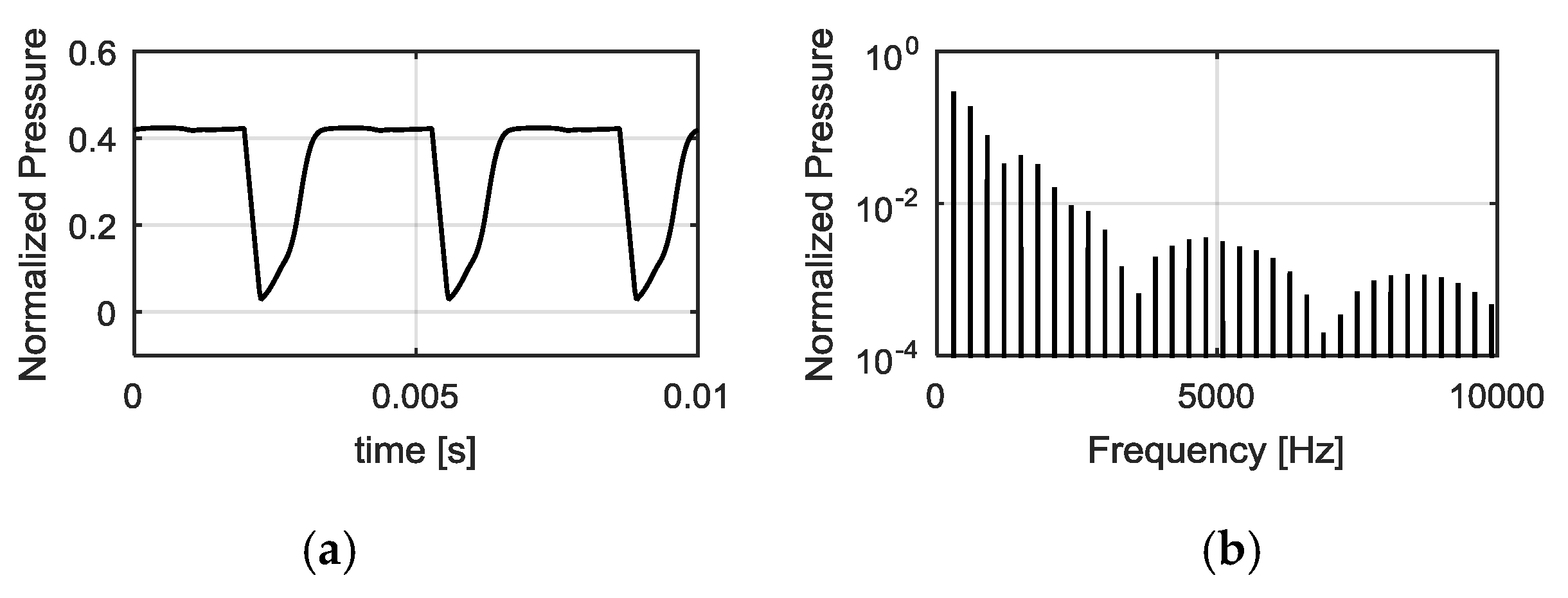
2.2. Model of Internal Fluid-Borne Noise Sources
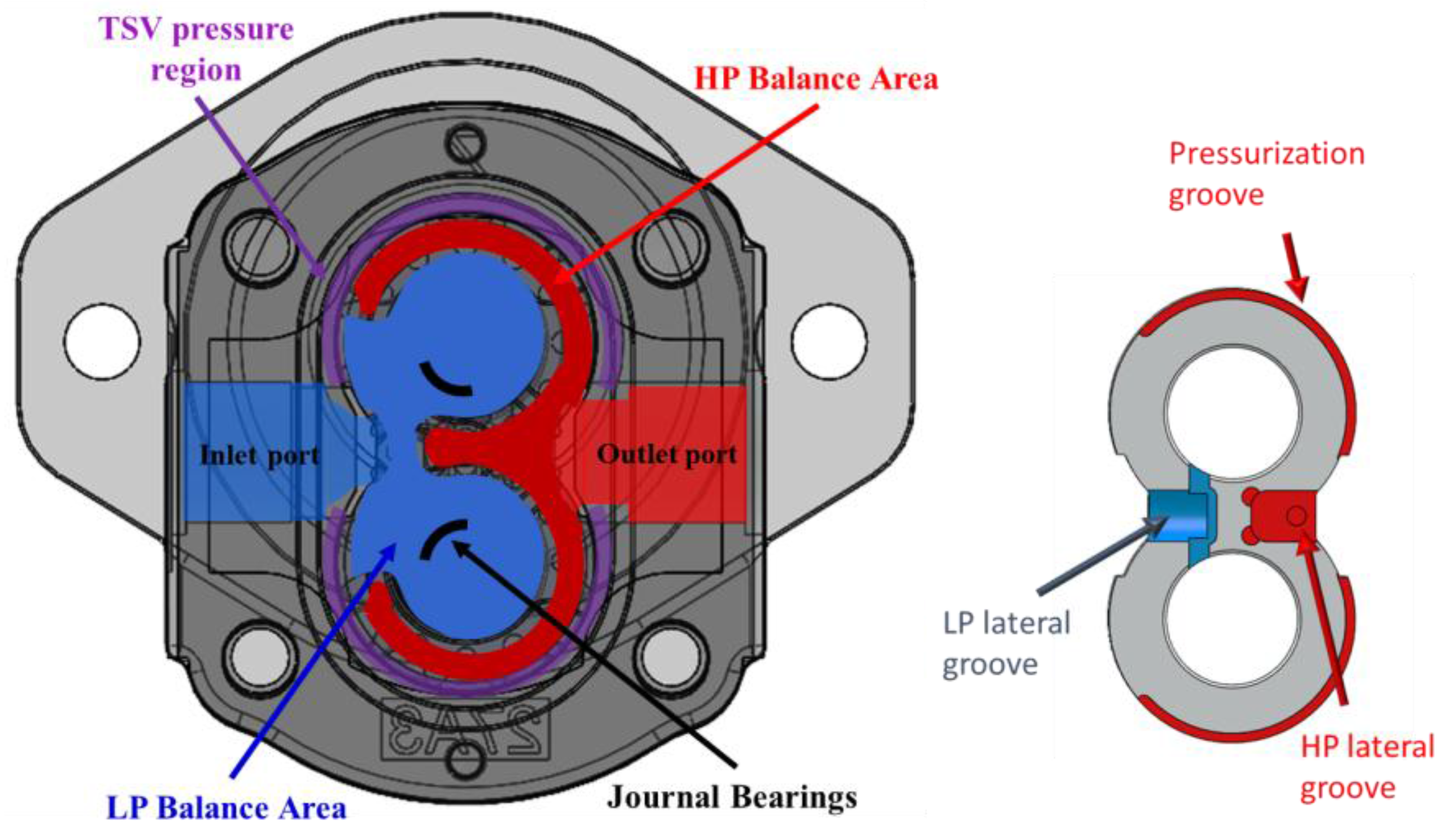
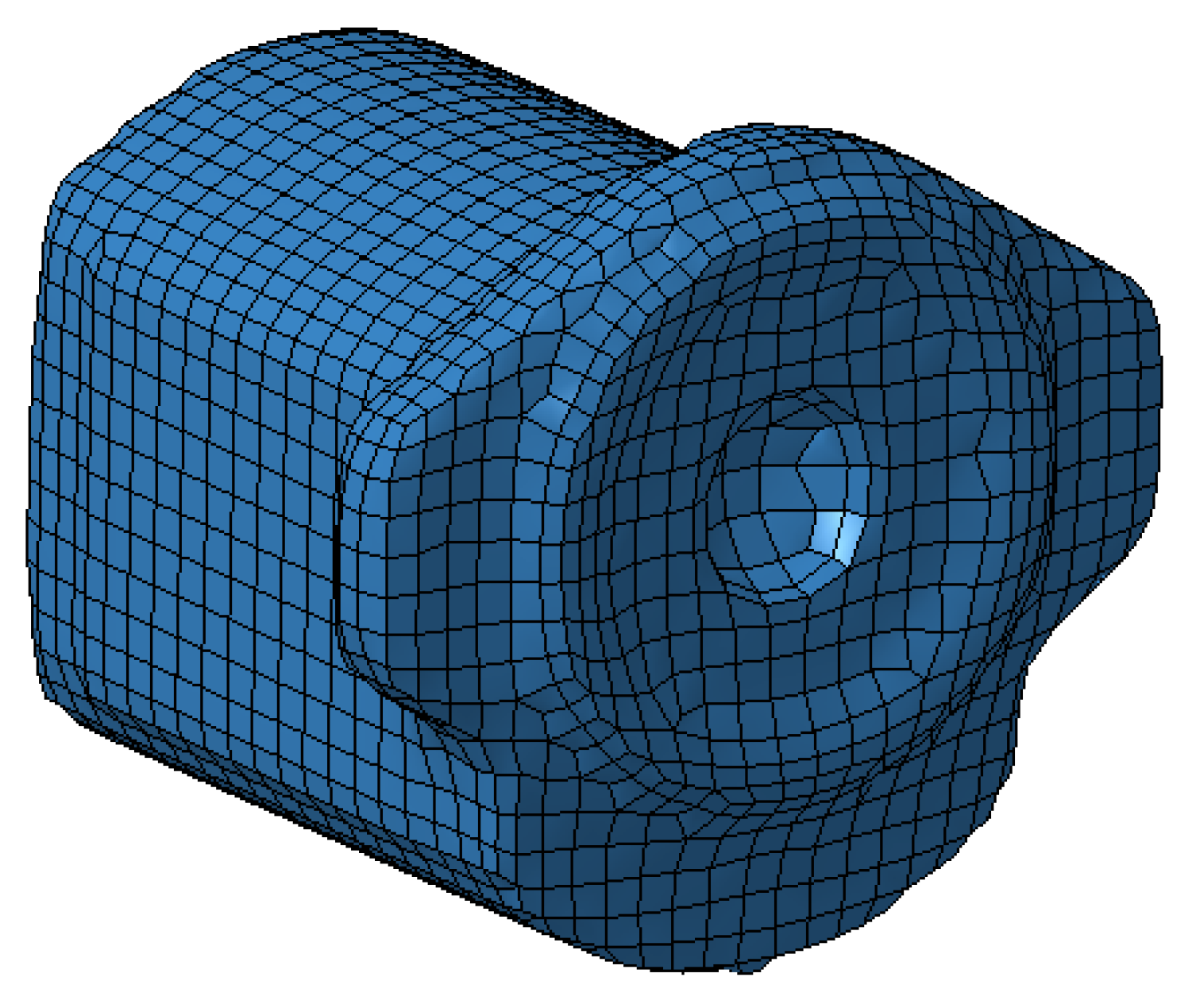
2.3. Structural Model of Pump Body Response
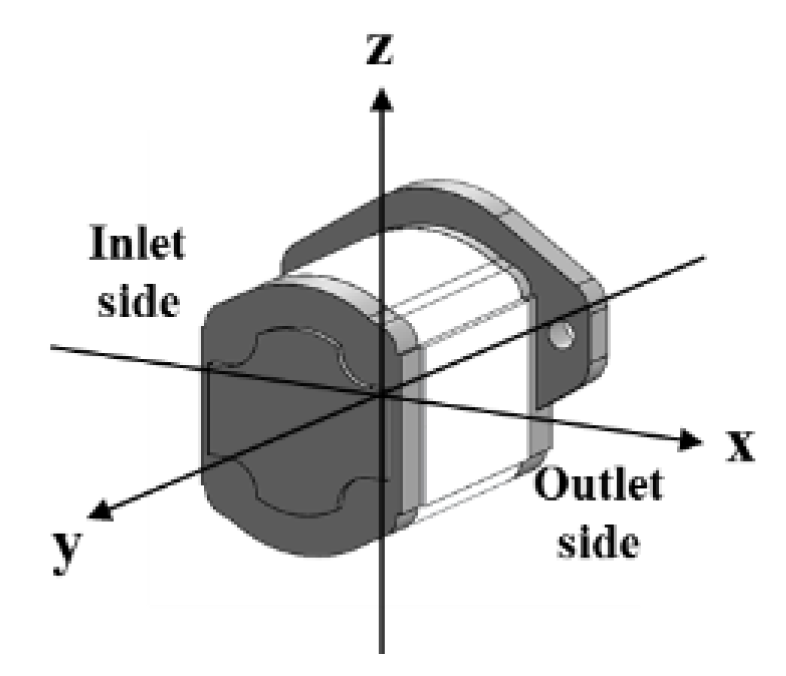
2.4. Acoustic Model
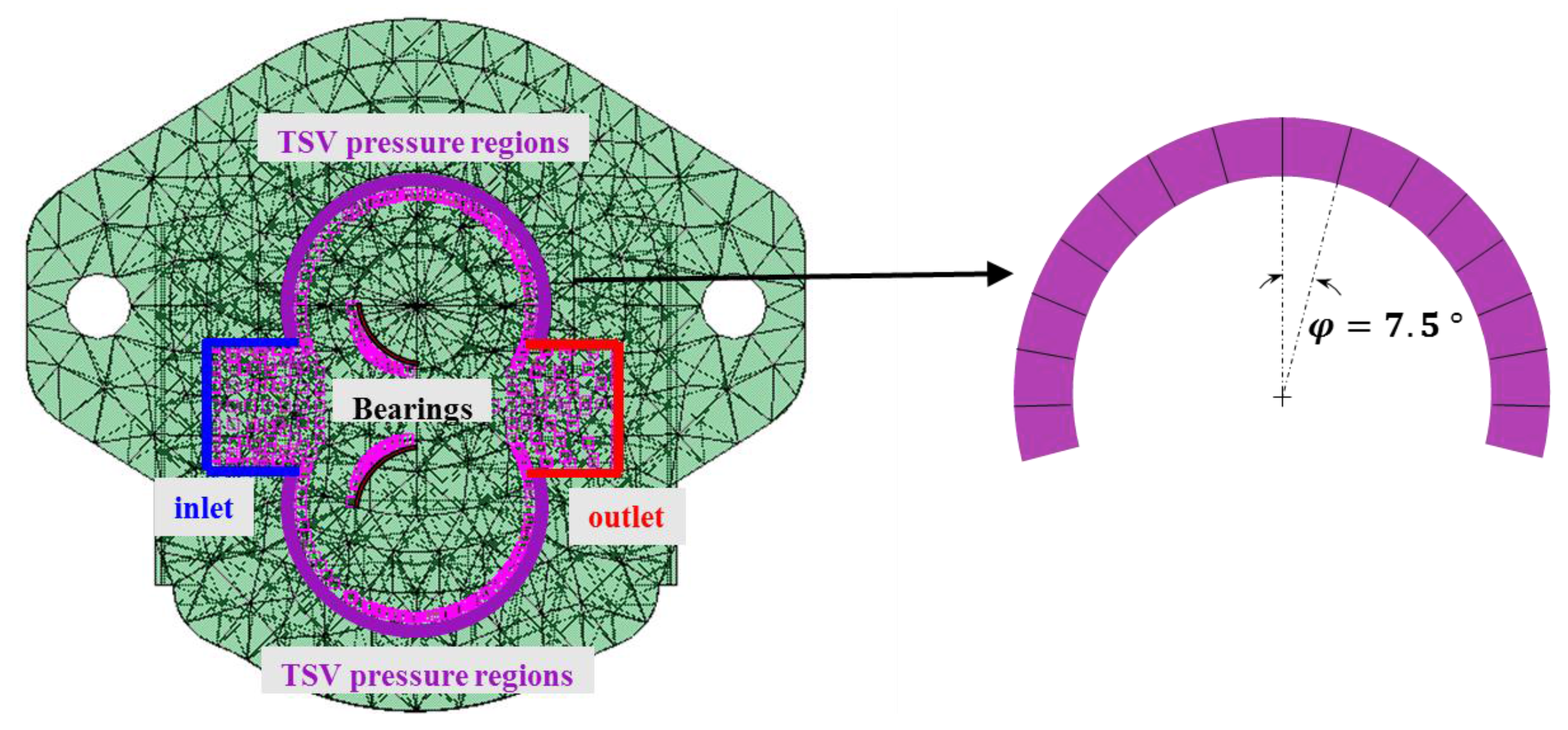
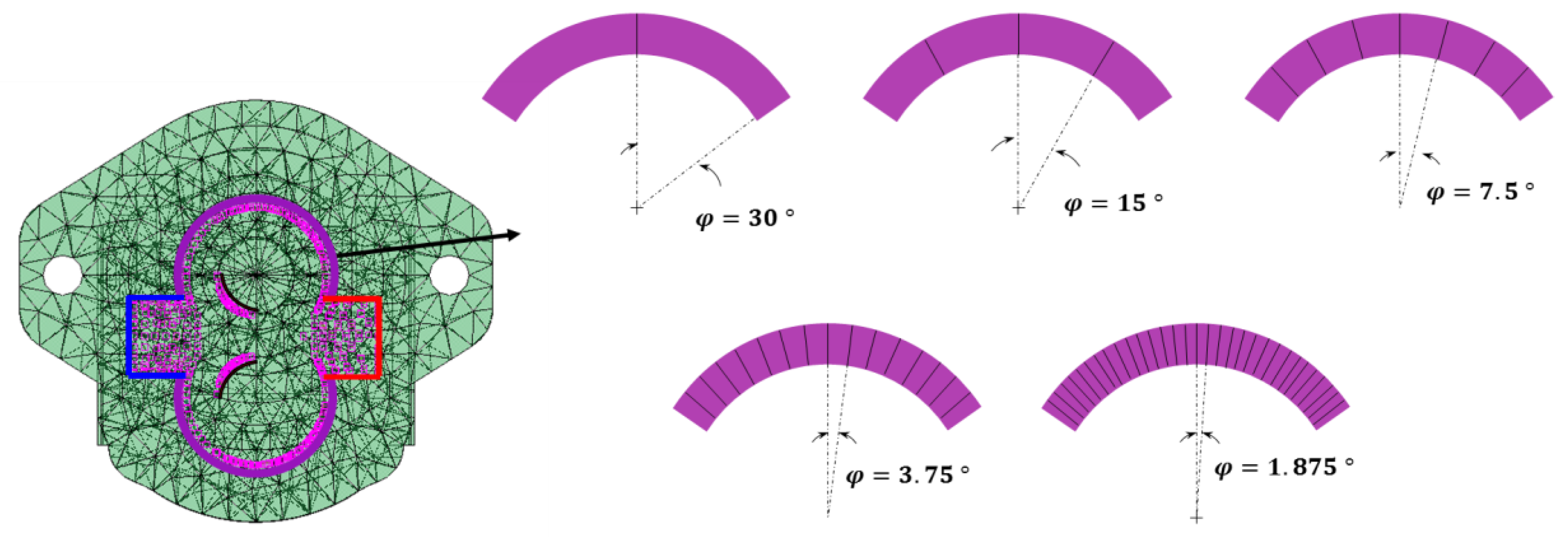
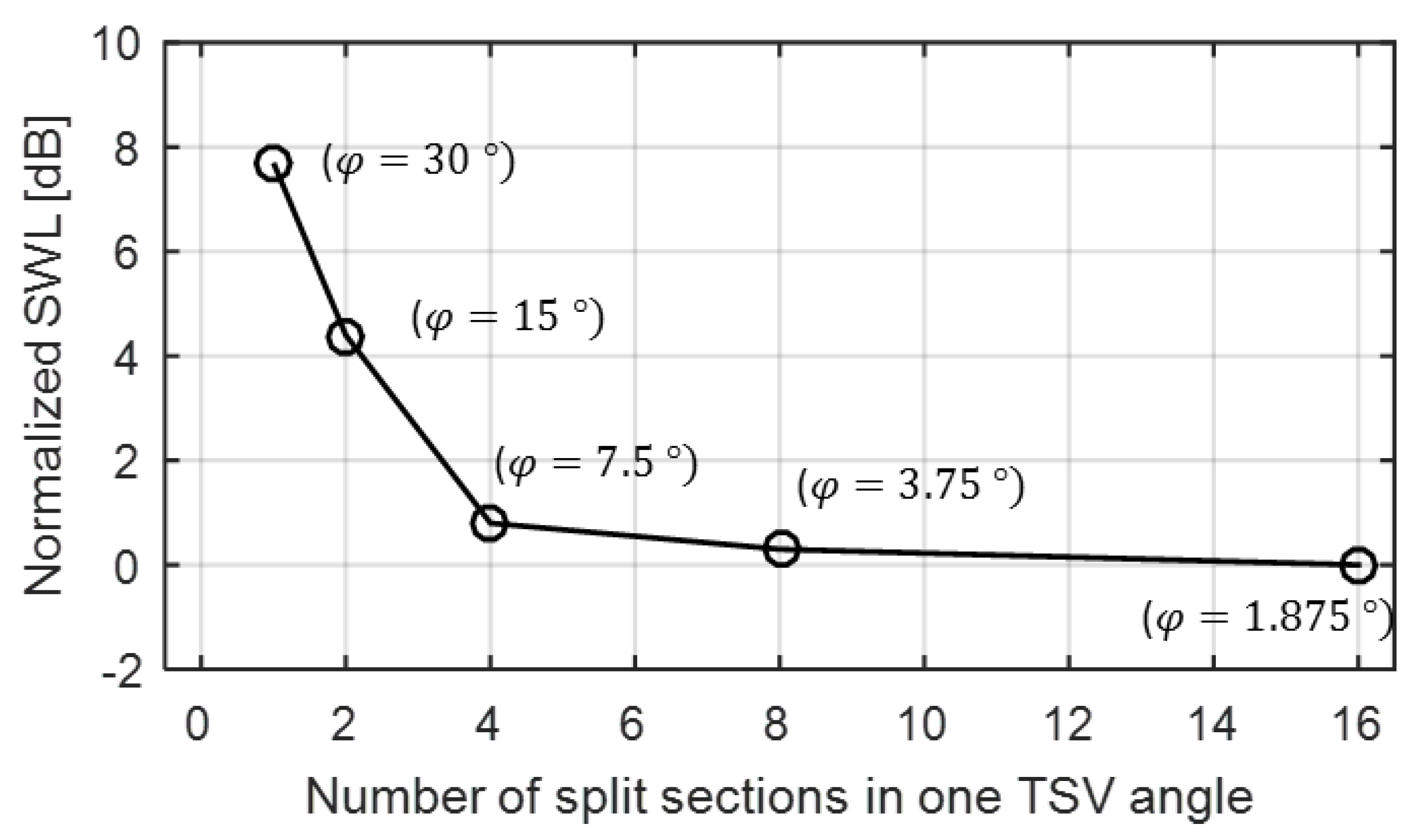
2.5. Sensitivity Study on the Angular Interval for Discretization of the TSV Pressure Region
3. Acoustic Results
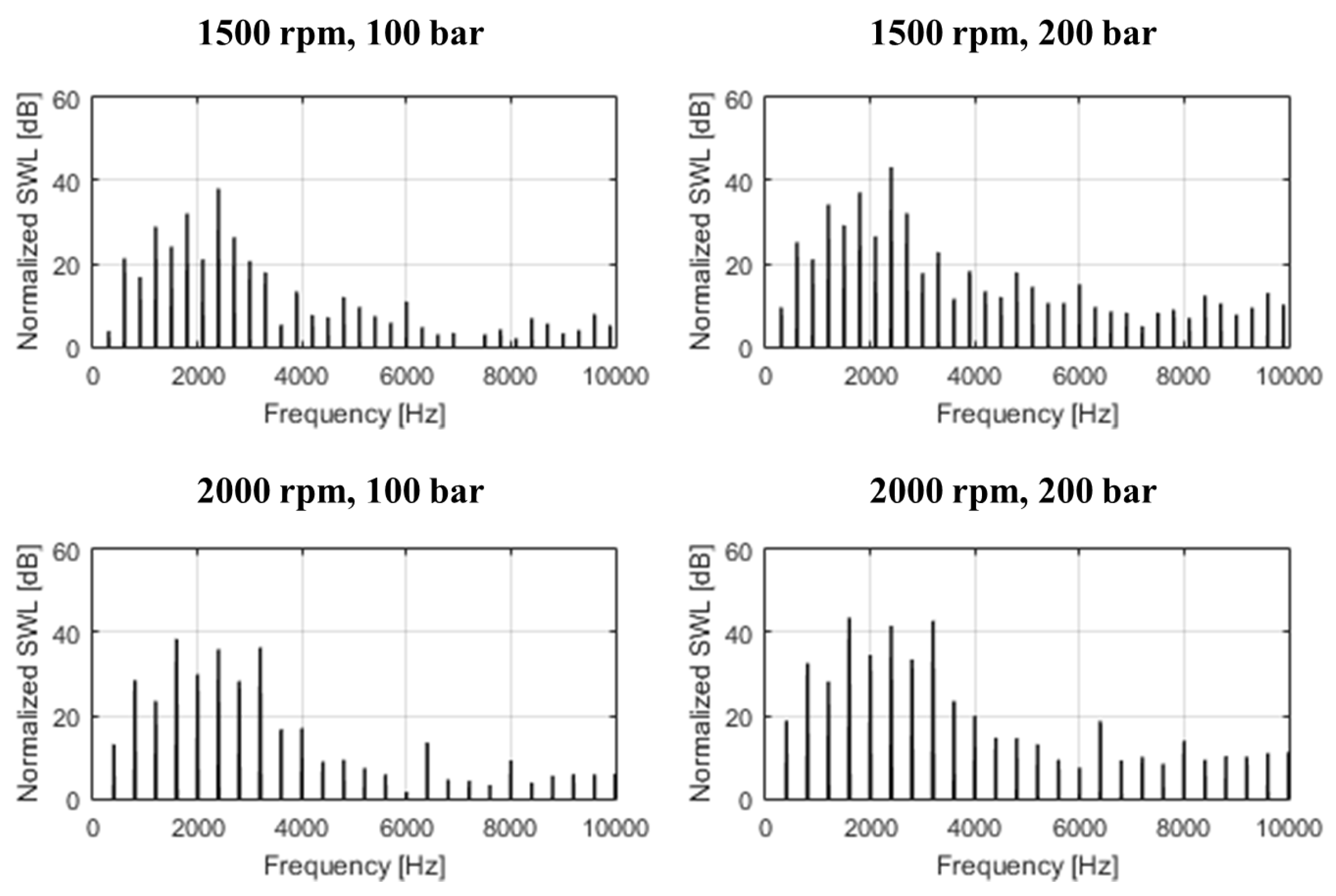
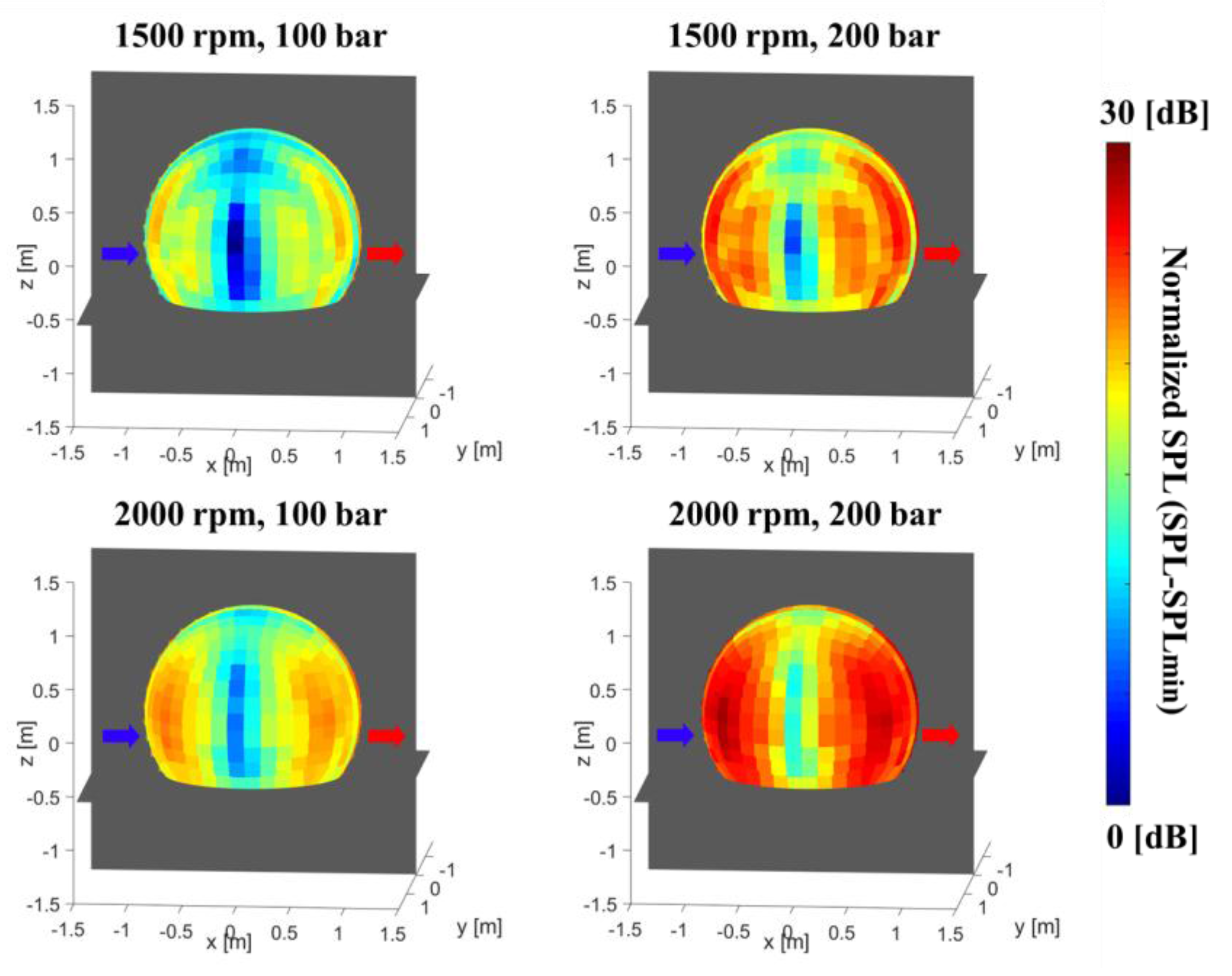
3.1. Numerical Results
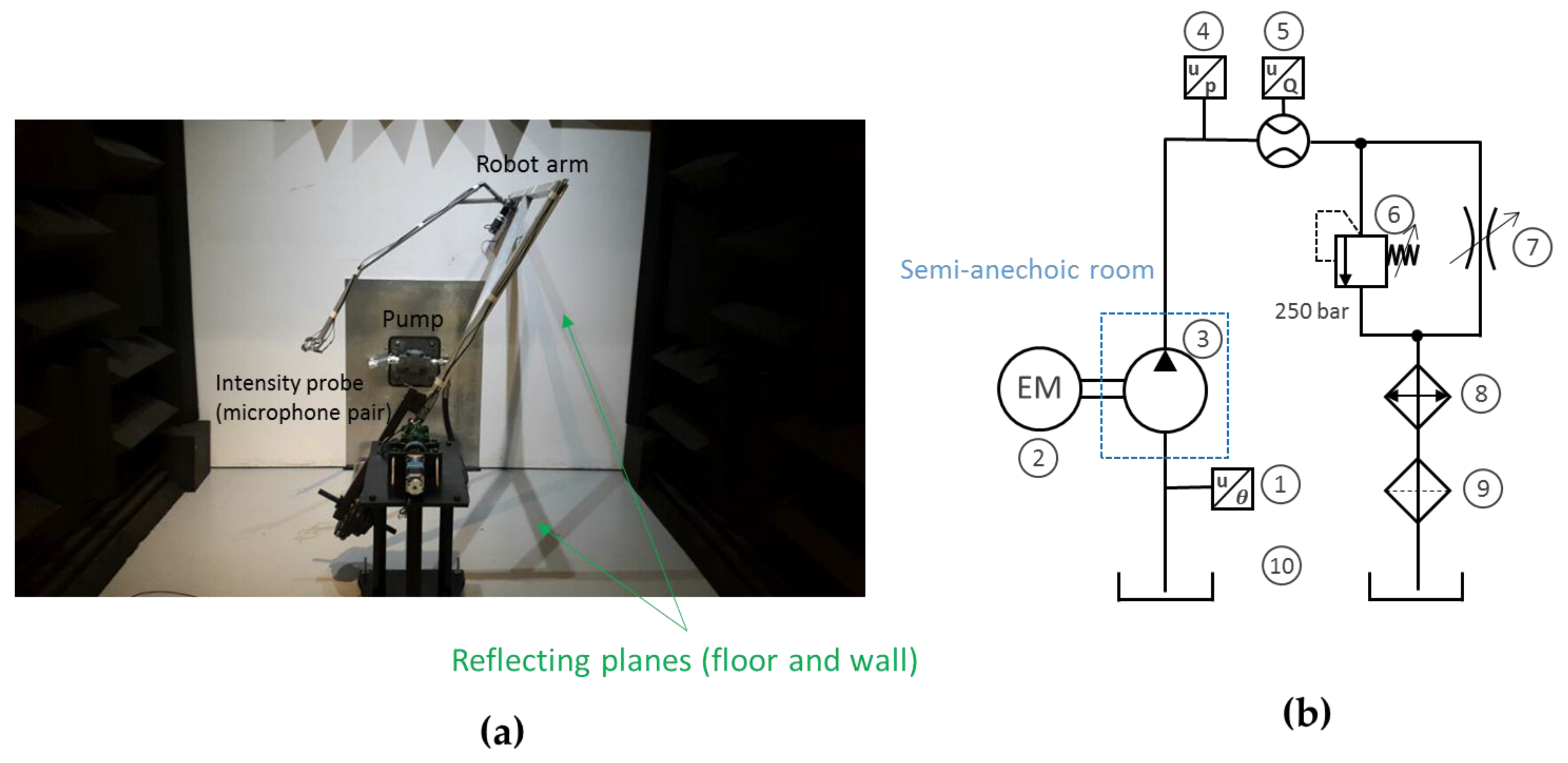
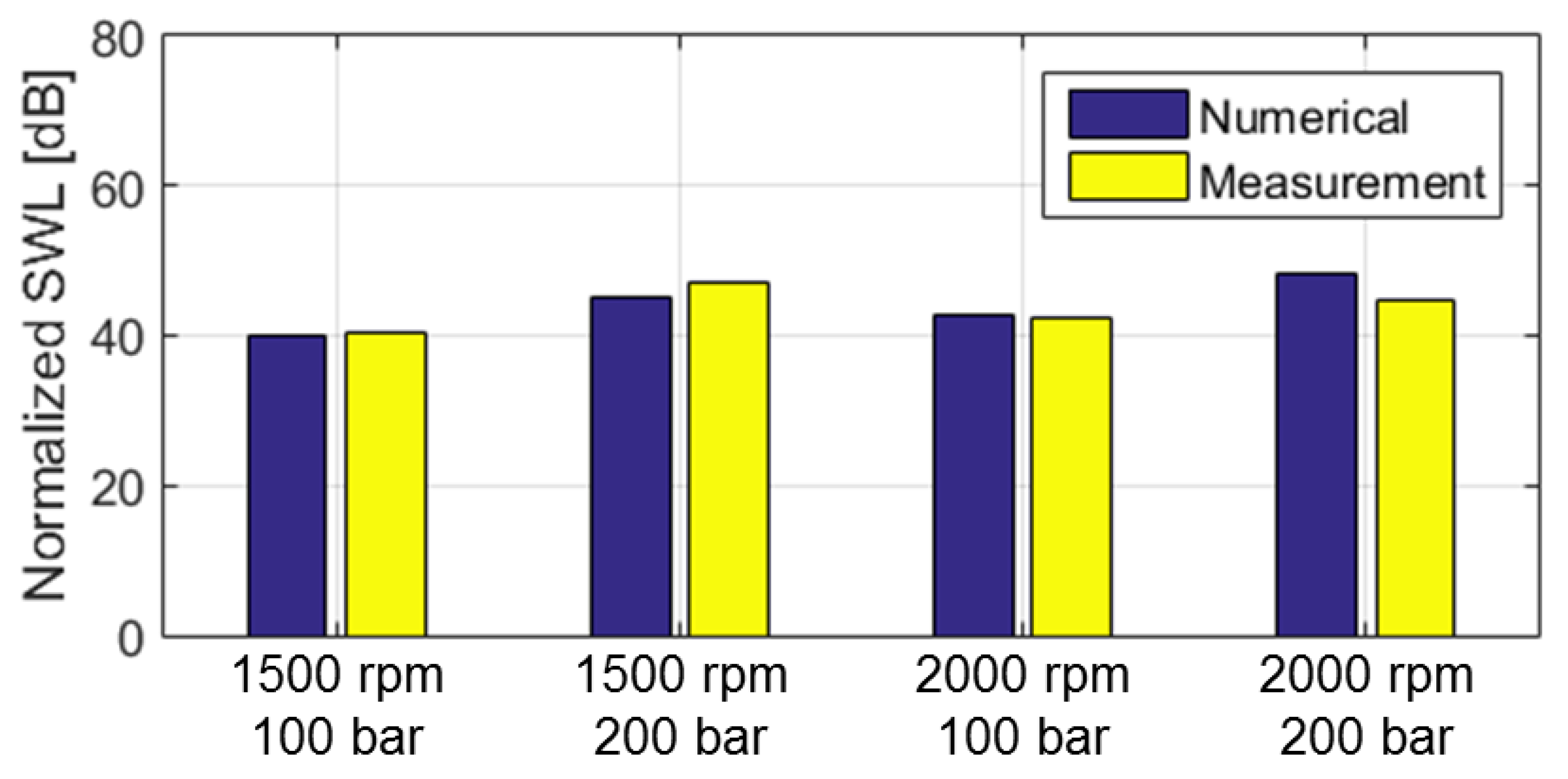
3.2. Experimental Validation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fiebig, W. Location of noise sources in fluid power machines. Int. J. Occup. Saf. Ergon. 2007, 13, 441–450. [Google Scholar] [CrossRef] [PubMed]
- Bonanno, A.; Pedrielli, F. A study of the structure borne noise of hydraulic gear pumps. In Proceedings of the 7th JFPS International Symposium on Fluid Power, Toyama, Japan, 15–18 September 2008; pp. 641–646. [Google Scholar]
- Edge, K.A. Designing quieter hydraulic systems—Some recent developments and contributions. In Proceedings of the Fourth JHPS International Symposium on Fluid Power, Tokyo, Japan, 15–17 November 1999; pp. 3–27. [Google Scholar]
- Negrini, S. A gear pump designed for noise abatement and flow ripple reduction. In Proceedings of the International Fluid Power Exposition and Technical Conference, Chicago, IL, USA, 23–25 April 1996. [Google Scholar]
- Mucchi, E.; Dalpiaz, G.; Del Rincon, A.F. Elastodynamic analysis of a gear pump. Part I: Pressure distribution and gear eccentricity. Mech. Syst. Signal Proc. 2010, 24, 2160–2179. [Google Scholar] [CrossRef]
- Manring, N.D.; Kasaragadda, S.B. The theoretical flow ripple of an external gear pump. ASME J. Dyn. Syst. Meas. Control 2003, 125, 396–404. [Google Scholar] [CrossRef]
- Harrison, K.A.; Edge, K.A. Reduction of axial piston pump pressure ripple. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2000, 214, 53–64. [Google Scholar] [CrossRef]
- Opperwall, T.; Vacca, A. Modeling noise sources and propagation in displacement machines and hydraulic lines. In Proceedings of the 9th JFPS International Symposium on Fluid Power, Matsue, Japan, 28–31 October 2014. [Google Scholar]
- Huang, K.J.; Chen, C.C. Kinematic displacement optimization of external helical gear pumps. Chung Hua J. Sci. Eng. 2008, 6, 23–28. [Google Scholar]
- Morselli, M.A. Geared Hydraulic Machine and Relative Gear Wheel. U.S. Patent 20150330387 A1, 19 November 2015. [Google Scholar]
- Devendran, R.S.; Vacca, A. Design potentials of external gear machines with asymmetric tooth profile. In Proceedings of the ASME/Bath Symposium on FPMC 2013, Sarasota, FL, USA, 8–11 October 2013; p. 12. [Google Scholar]
- Nagamura, K.; Ikejo, K.; Tutulan, F.G. Design and performance of gear pumps with a non-involute tooth profile. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2004, 218, 699–711. [Google Scholar] [CrossRef]
- Zhou, Y.; Hao, S.; Hao, M. Design and performance analysis of a circular-arc gear pump operating at high pressure and high speed. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 189–205. [Google Scholar] [CrossRef]
- Morselli, M.A. A Positive-Displacement Rotary Pump with Helical Rotors. EP Patent 1132618 B1, 30 April 2008. [Google Scholar]
- Lätzel, M.; Schwuchow, D. An innovative external gear pump for low noise applications. In Proceedings of the 8th International Fluid Power Conference (IFK), Dresden, Germany, 26–28 March 2012. [Google Scholar]
- Casoli, P.; Vacca, A.; Franzoni, G.; Guidetti, M. Effects of some relevant design parameters on external gear pumps operating: Numerical predictions and experimental investigations. In Proceedings of the 6IFK Internationales Fluidtechnisches Kolloquium, Dreden, Germany, 31 March–2 April 2008. [Google Scholar]
- Borghi, M.; Milani, M.; Zardin, B.; Patrinieri, F. The influence of cavitation and aeration on gear pump and motors meshing volume pressures. In Proceedings of the ASME International Mechanical Engineering Congress & Exposition, Chicago, IL, USA, 5–10 November 2006; pp. 47–56. [Google Scholar]
- Wang, S.; Sakurai, H.; Kasarekar, A. The optimal design in external gear pumps and motors. IEEE/ASME Trans. Mechatron. 2011, 16, 945–952. [Google Scholar] [CrossRef]
- Mucchi, E.; Tosi, G.; D’Ippolito, R.; Dalpiaz, G. A robust design optimization methodology for external gear pumps. In Proceedings of the ASME 2010 10th Biennial Conference on Engineering Systems Design and Analysis ESDA 2010, Istanbul, Turkey, 12–14 July 2010; pp. 1–10. [Google Scholar]
- Devendran, R.S.; Vacca, A. Optimal design of gear pumps for exhaust gas aftertreatment applications. Simul. Model. Pract. Theory 2013, 38, 1–19. [Google Scholar] [CrossRef]
- Edge, K.A.; Johnston, D.N. The “secondary source” method for the measurement of pump pressure ripple characteristics Part 1: Description of method. Proc. Inst. Mech. Eng. Part A J. Power Energy 1990, 204, 33–40. [Google Scholar] [CrossRef]
- Nakagawa, S.; Ichiyanagi, T.; Nishiumi, T. Experimental investigation on effective bulk modulus and effective volume in an external gear pump. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, 7–9 September 2016. [Google Scholar]
- Hartmann, K.; Harms, H.H.; Lang, T. A model based approach to optimize the noise harmonics of internal gear pumps by reducing the pressure pulsation. In Proceedings of the 8th International Fluid Power Conference (IFK) 2012, Dresden, Germany, 26–28 March 2012. [Google Scholar]
- Tang, C.; Wang, Y.S.; Gao, J.H.; Guo, H. Fluid-sound coupling simulation and experimental validation for noise characteristics of a variable displacement external gear pump. Noise Control Eng. J. 2014, 62, 123–131. [Google Scholar] [CrossRef]
- Carletti, E.; Miccoli, G.; Pedrielli, F.; Parise, G. Vibroacoustic measurements and simulations applied to external gear pumps: An integrated simplified approach. Arch. Acoust. 2016, 41, 285–296. [Google Scholar] [CrossRef]
- Miccoli, G.; Carletti, E.; Pedrielli, F.; Parise, G. Simplified methodology for pump acoustic field analysis: The effect of different excitation boundary conditions. In Proceedings of the Inter-Noise 2016, Hamburg, Germany, 27–30 August 2016; pp. 3984–3992. [Google Scholar]
- Mucchi, E.; Dalpiaz, G. Numerical vibro-acoustic analysis of gear pumps for automotive applications. In Proceedings of the International Conference on Noise and Vibration Engineering ISMA 2012, Leuven, Belgium, 17–19 September 2012; pp. 3951–3961. [Google Scholar]
- Mucchi, E.; Rivola, A.; Dalpiaz, G. Modelling dynamic behaviour and noise generation in gear pumps: Procedure and validation. Appl. Acoust. 2014, 77, 99–111. [Google Scholar] [CrossRef]
- Vacca, A.; Guidetti, M. Modelling and experimental validation of external spur gear machines for fluid power applications. Simul. Model. Pract. Theory 2011, 19, 2007–2031. [Google Scholar] [CrossRef]
- Opperwall, T.; Vacca, A. A combined FEM/BEM model and experimental investigation into the effects of fluid-borne noise sources on the air-borne noise generated by hydraulic pumps and motors. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 457–471. [Google Scholar] [CrossRef]
- Dhar, S.; Vacca, A. A fluid structure interaction-EHD model of the lubricating gaps in external gear machines: Formulation and validation. Tribol. Int. 2013, 62, 78–90. [Google Scholar] [CrossRef]
- Pellegri, M.; Vacca, A. A CFD-radial motion coupled model for the evaluation of the features of journal bearings in external gear machines. In Proceedings of the ASME/BATH 2015 Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015. [Google Scholar]
- Zhao, X.; Vacca, A. Numerical analysis of theoretical flow in external gear machines. Mech. Mach. Theory 2017, 108, 41–56. [Google Scholar] [CrossRef]
- Thiagarajan, D.; Vacca, A. Mixed lubrication effects in the lateral lubricating interfaces of external gear machines: Modelling and experimental validation. Energies 2017, 10, 111. [Google Scholar] [CrossRef]
- Zhou, J.; Vacca, A.; Casoli, P. A novel approach for predicting the operation of external gear pumps under cavitating conditions. Simul. Model. Pract. Theory 2014, 45, 35–49. [Google Scholar] [CrossRef]
- Opperwall, T.; Vacca, A. A transfer path approach for experimentally determining the noise impact of hydraulic components. In Proceedings of the SAE Commercial VEC 2015, Rosemont, IL, USA, 6–8 October 2015. [Google Scholar]
- Desmet, W.; Sas, P.; Vandepitte, D. Numerical Acoustics Theoretical Manual; LMS International: Lueven, Belgium, 2012. [Google Scholar]
- Acoustics—Determination of Sound Power Levels of Noise Sources using Sound Intensity. Part 1: Measurement at Discrete Points; International Standardization Organization (ISO): Geneva, Switzerland, 1993.
- Fahy, F.J. Sound Intensity, 2nd ed.; E & FN Spon: London, UK, 1995. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Method | Tetrahedral mesh |
| Algorithm | Patch Independent |
| Midside nodes | No |
| Minimum edge length | 0.0005 m |
| Number of elements | 17,942 |
| Number of nodes | 29,966 |
| Mode | Normalized Modal Frequencies |
|---|---|
| 1 | 1.00 |
| 2 | 1.02 |
| 3 | 1.95 |
| 4 | 2.75 |
| 5 | 3.71 |
| 6 | 3.89 |
| 7 | 5.18 |
| 8 | 5.43 |
| 9 | 5.60 |
| 10 | 5.72 |
| 11 | 5.85 |
| 12 | 6.27 |
| 13 | 6.36 |
| 14 | 6.60 |
| 15 | 6.94 |
| 16 | 7.04 |
| Operating Conditions | Normalized Overall SWL |
|---|---|
| 1500 rpm, 100 bar | 40.0 dB |
| 1500 rpm, 200 bar | 45.1 dB |
| 2000 rpm, 100 bar | 42.6 dB |
| 2000 rpm, 200 bar | 48.1 dB |
| No. | Description | Details |
|---|---|---|
| 1 | Inlet temperature sensor | Wika TR33, Temperature range 30–120 °C |
| 2 | Electric motor | SSB, 500 Nm, speed ±3000 rpm |
| 3 | Test pump | Casappa PLP20QW, 22 cc/rev |
| 4 | Outlet pressure sensor | Hydac 4745—Strain gauge type—Range: 0–400 bar |
| 5 | Outlet flow meter | Kracht VC5 24V—Fixed displacement volume (gear type) —Range: 1–191 ℓ/min |
| 6 | Pressure relief valve | Sun Hydraulics RPICKCN, Capacity: 100 gpm (378.5 ℓ/min), Maximum operating pressure: 5000 psi (344.7 bar) |
| 7 | Needle valve | Sun Hydraulics NFECKEN, Capacity: 30 gpm (113.6 ℓ/min), Maximum operating pressure: 5000 psi (344.7 bar) |
| 8 | Heat exchanger | Parker OAW 46-60, Cooling Capacity: 23–142 hp (17.2–105.9 kW) |
| 9 | Filter | Parker 50AT, Nominal Filter Rating: 10 micron, Nominal Flow Rating: 40 gpm (151.4 ℓ/min) |
| 10 | Reservoir | Buyers UR 70S, Capacity: 70 gallon (265.0 ℓ), ISO 46 oil |
| Operating Conditions | Numerical Normalized SWL | Measured Normalized SWL | SWL Difference |
|---|---|---|---|
| 1500 rpm, 100 bar | 40.0 dB | 40.5 dB | −0.5 dB |
| 1500 rpm, 200 bar | 45.1 dB | 46.9 dB | −1.8 dB |
| 2000 rpm, 100 bar | 42.6 dB | 42.5 dB | +0.1 dB |
| 2000 rpm, 200 bar | 48.1 dB | 45.7 dB | +3.4 dB |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, S.; Opperwall, T.; Vacca, A.; Rigosi, M. Modeling Noise Sources and Propagation in External Gear Pumps. Energies 2017, 10, 1068. https://doi.org/10.3390/en10071068
Woo S, Opperwall T, Vacca A, Rigosi M. Modeling Noise Sources and Propagation in External Gear Pumps. Energies. 2017; 10(7):1068. https://doi.org/10.3390/en10071068
Chicago/Turabian StyleWoo, Sangbeom, Timothy Opperwall, Andrea Vacca, and Manuel Rigosi. 2017. "Modeling Noise Sources and Propagation in External Gear Pumps" Energies 10, no. 7: 1068. https://doi.org/10.3390/en10071068
APA StyleWoo, S., Opperwall, T., Vacca, A., & Rigosi, M. (2017). Modeling Noise Sources and Propagation in External Gear Pumps. Energies, 10(7), 1068. https://doi.org/10.3390/en10071068