
A Predictive Power Control Strategy for DFIGs Based on a Wind Energy Converter System



Abstract
:1. Introduction
1.1. Motivation
1.2. State of the Science
1.3. Contribution
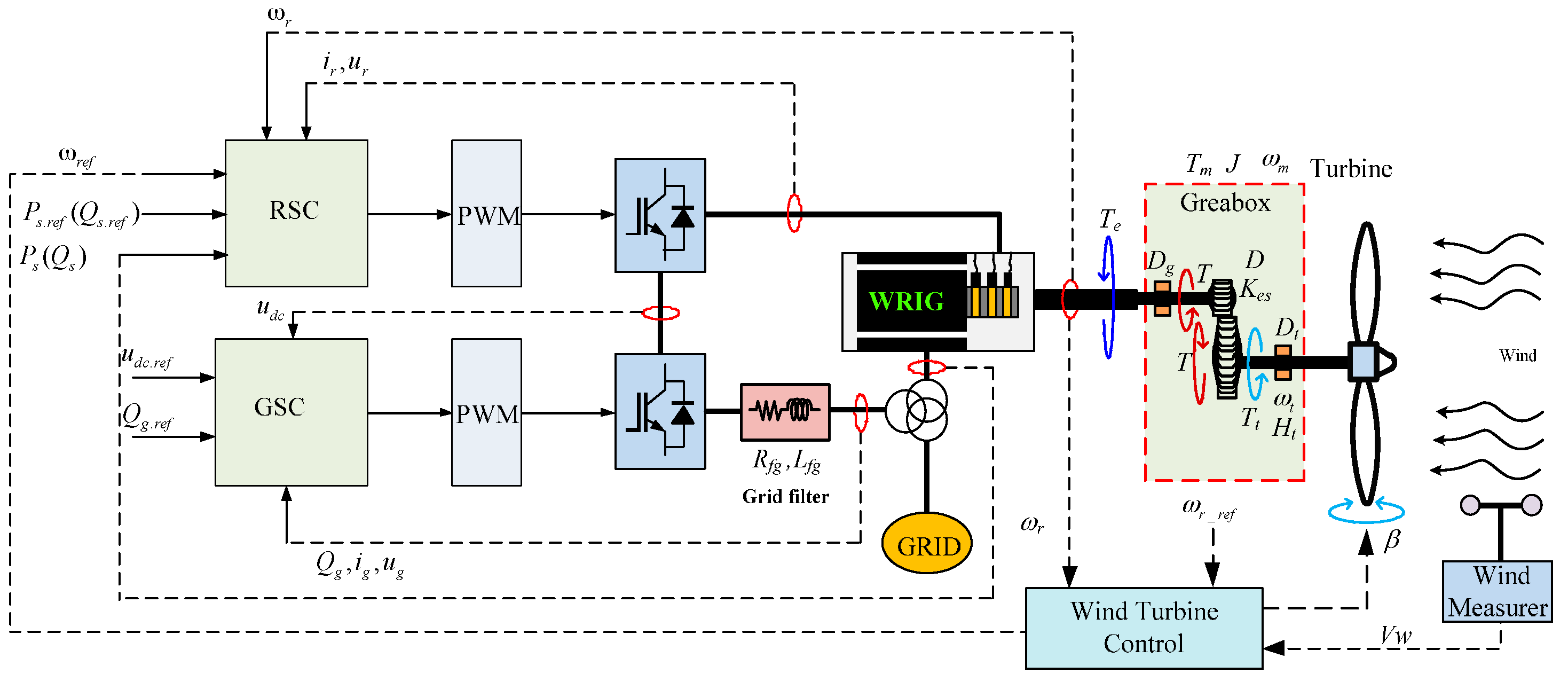
2. Mathematical Model of the Wind Energy Converter System
2.1. Dynamic Model of the Wind Turbine
2.2. Generator Model
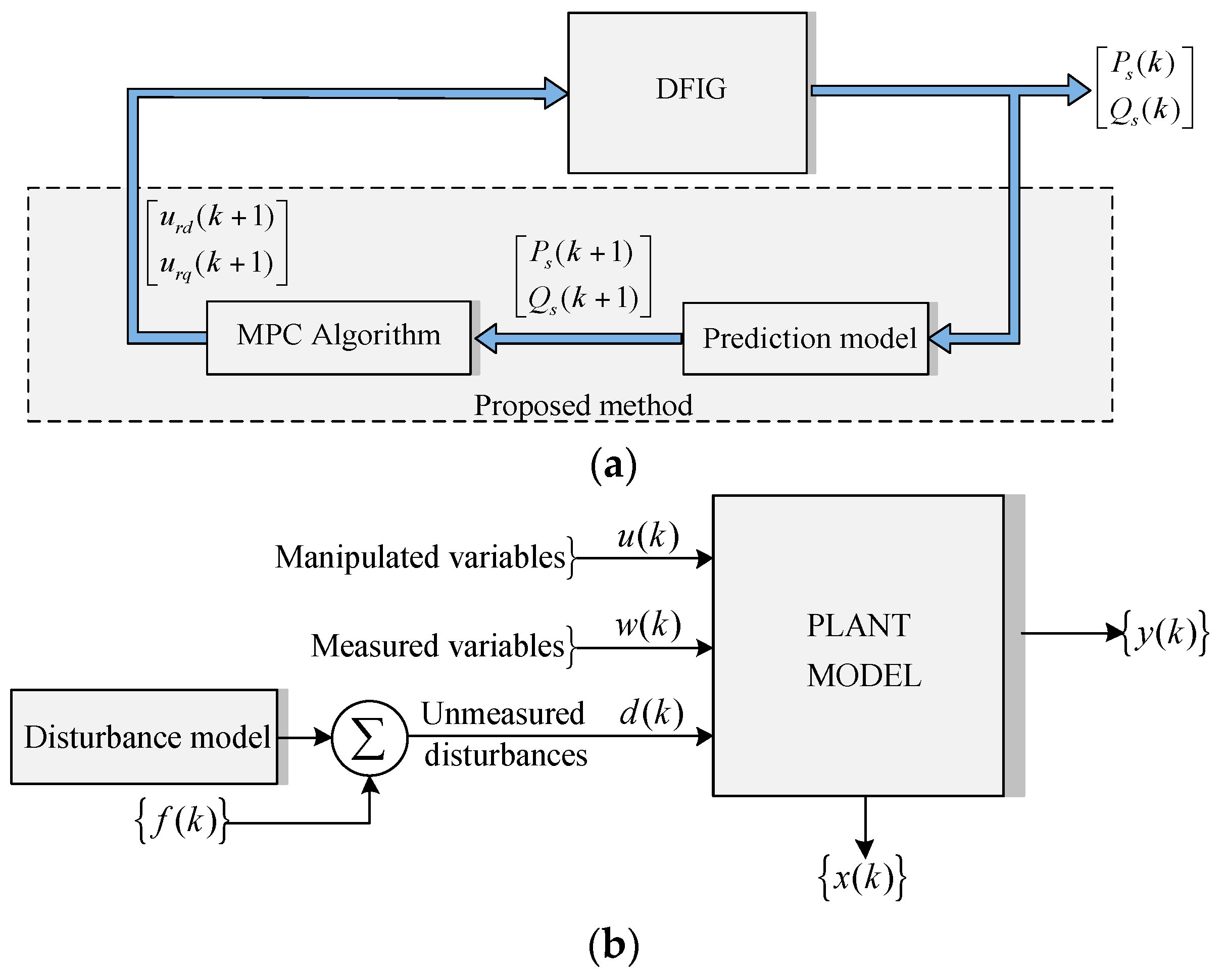
2.3. Modeling of Generator for Predictive Power Control
3. Proposed Predictive Power Control Strategy
3.1. RSC Controller
3.1.1. Impact of Errors
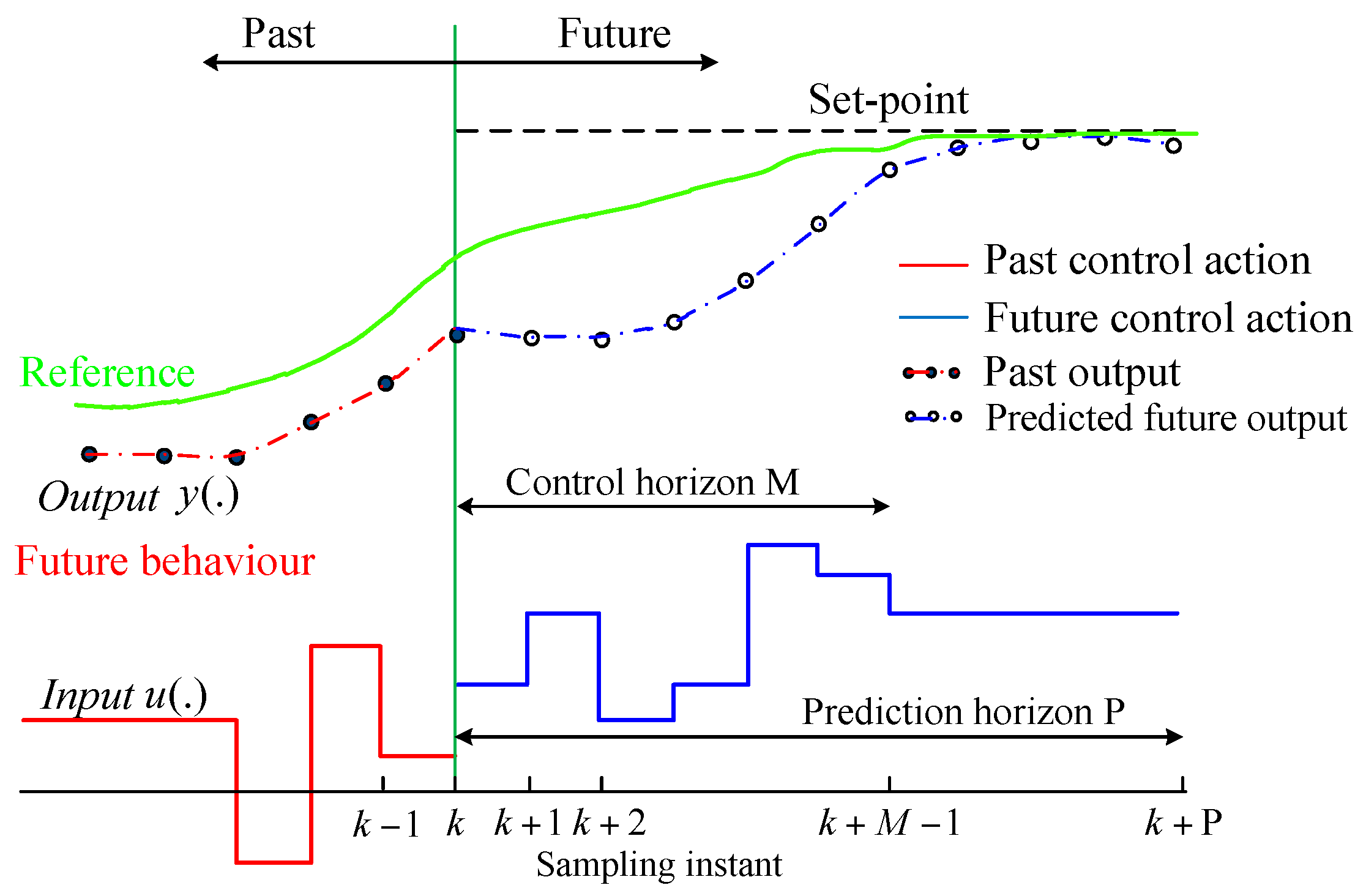
3.1.2. Design Self-Adaptive Model Predictive Controller
Output Prediction
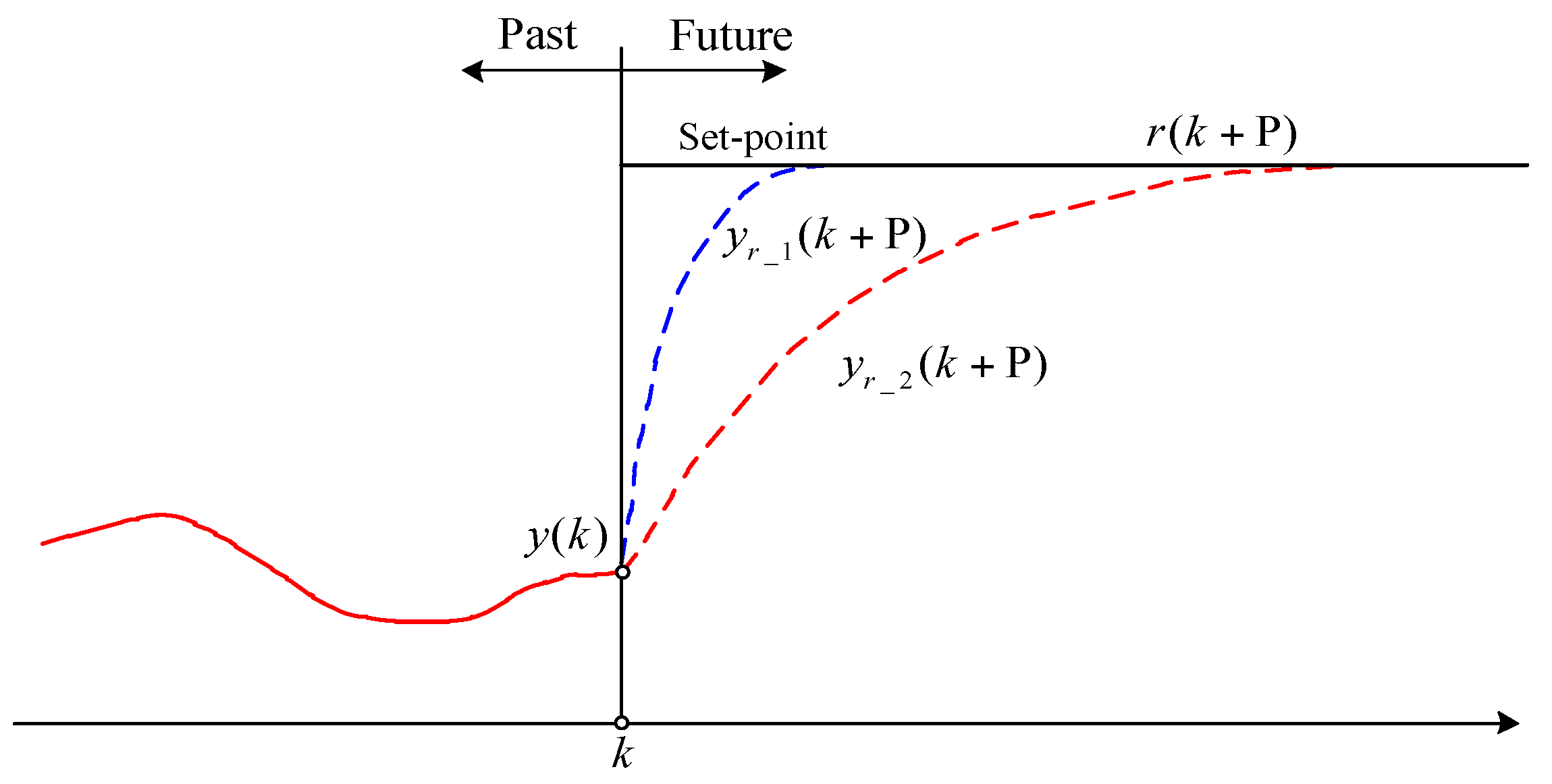
Reference Trajectory
Performance Index
3.1.3. Stability Analysis of the Self-Adaptive Model Predictive Controller
3.2. GSC Controller
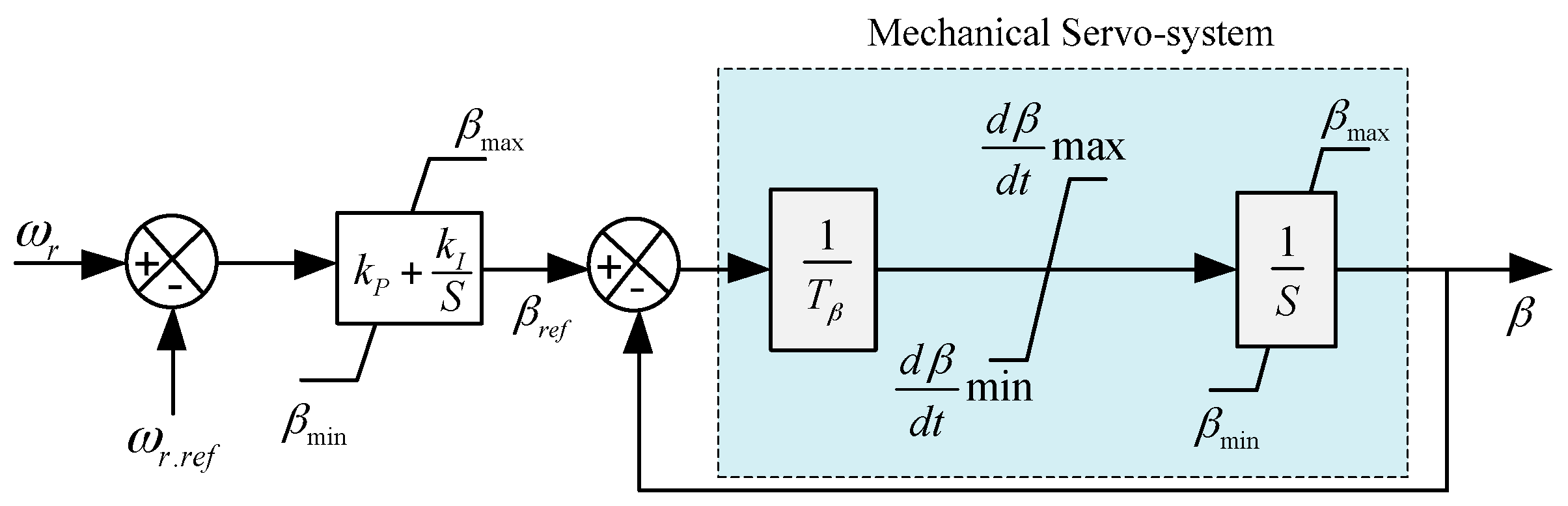
3.3. Turbine Control
4. Case Study and Results
- (i)
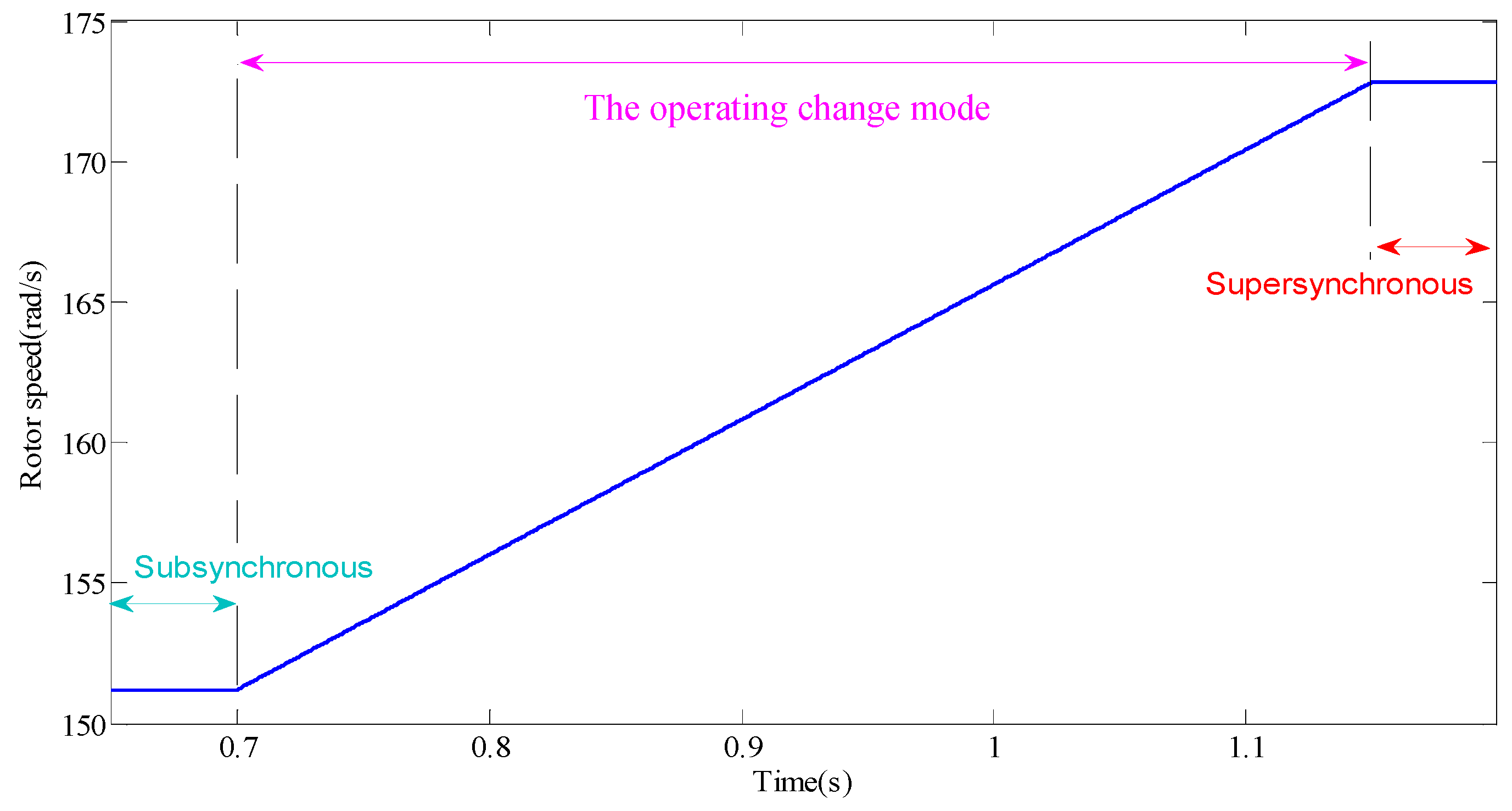
- The impact of the rotor speed variation,
- (ii)
- The impact of the parameter variation of the generator.
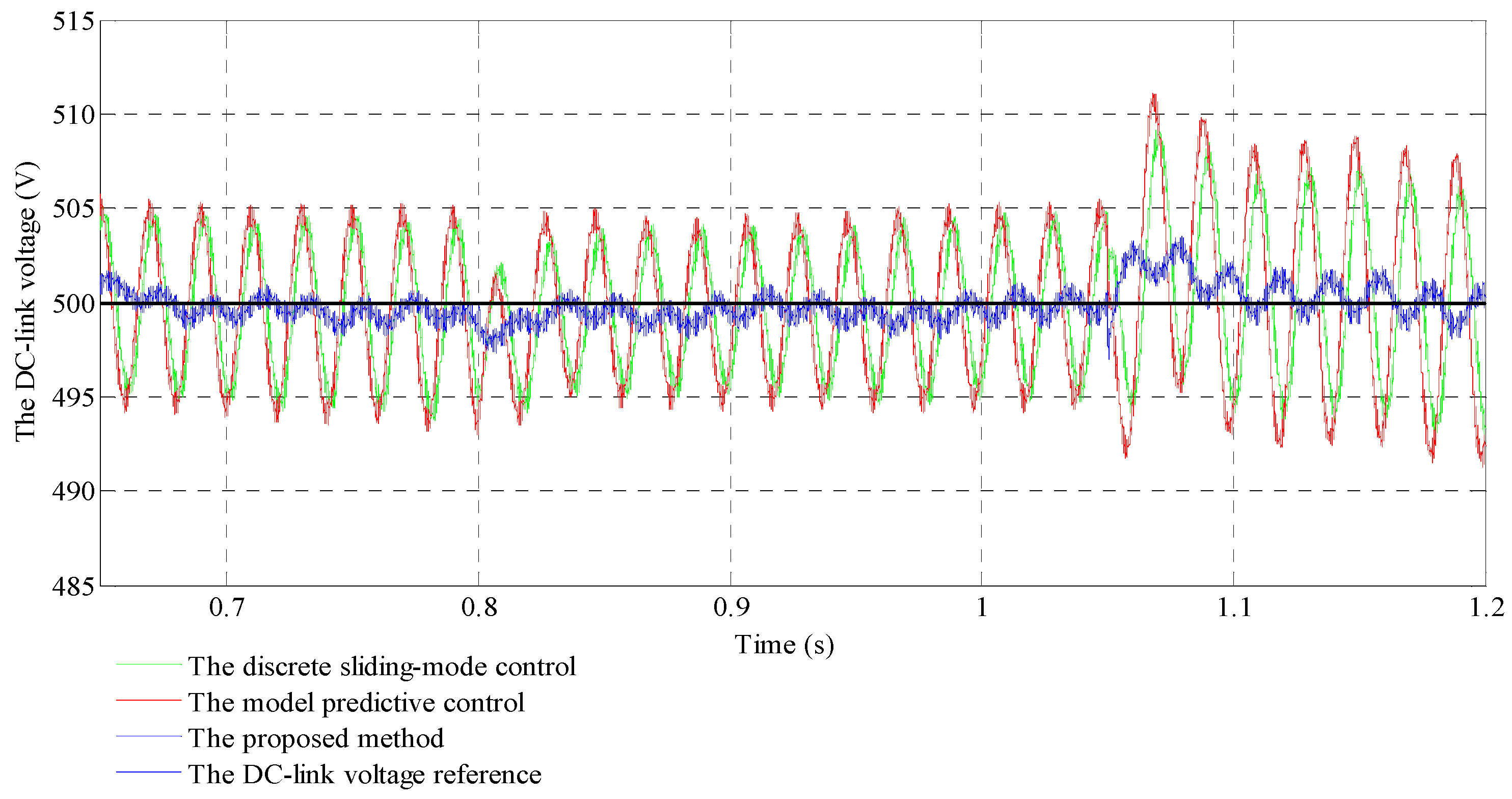
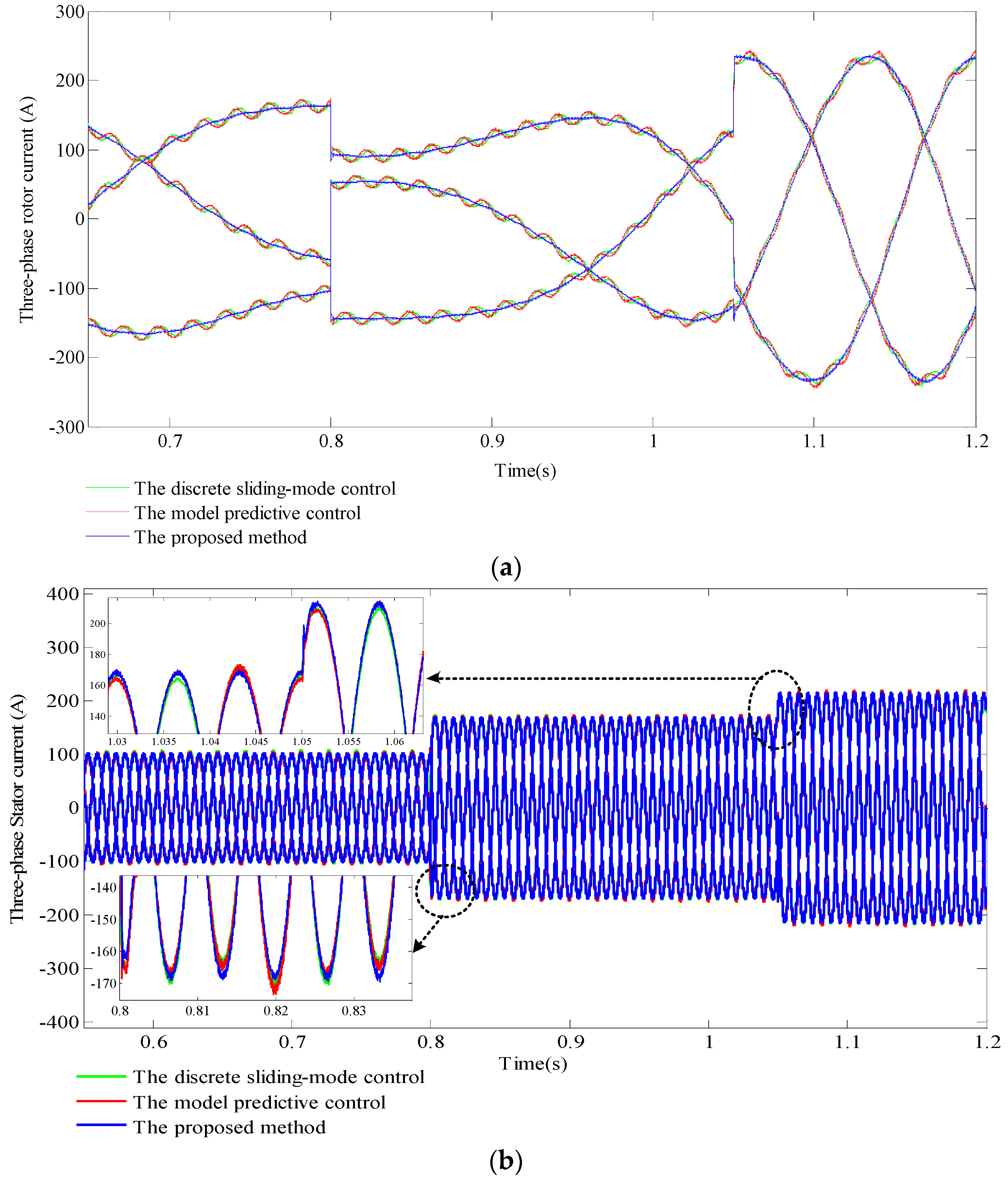
4.1. Case 1
4.2. Case 2
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Symbols | |
| A | State matrix of discrete state-space model |
| B | Control matrix of discrete state-space model |
| C | Output matrix of discrete state-space model |
| Ce | Output matrix of error discrete state-space model |
| Cf | Frictional coefficient |
| e(.) | State vector of error state-space model |
| G | Measurable matrix of discrete state-space model |
| Hp | Diagonal coefficient matrix |
| J | Inertia of the generator-turbine system |
| Kotp | Optimal constant of turbine corresponding to the pitch angle equal to zero |
| Ls | Stator inductance |
| Lr | Rotor inductance |
| Lm | Mutual inductance |
| M | Control horizon |
| P | Prediction horizon |
| PF | Power factor |
| Pm | Turbine mechanical power |
| Ps | Stator active power |
| Q, R | Pair of weight matrices in the cost function of predictive control |
| Qs | Stator reactive power |
| R | Turbine blades radius |
| Rr | Rotor resistance |
| Rs | Stator resistance |
| Te | Electromagnetic torque |
| Vw | Wind speed |
| ir | Rotor current |
| is | Stator current |
| f(k) | External disturbances vector |
| u(.) | Input vector |
| ur | Rotor voltage |
| us | Stator voltage |
| w(.) | Measurable vector |
| x(.) | State vector |
| y(.) | Output vector |
| ye(.) | Output vector of error state-space model |
| ∆A | State parameter perturbations matrix |
| ∆B | Input parameter perturbations matrix |
| αi,j | Factors of power coefficient |
| γ | Tuning parameter of adjustable variable of reference trajectory |
| λ | Turbine tip-speed ratio |
| λr | Rotor flux |
| λs | Stator flux |
| µ | Tuning parameter of adjustable variable of reference trajectory |
| ρ | Air density |
| σ | Leakage factor |
| τ | Tuning parameter of adjustable variable of reference trajectory |
| ωm | Rotor mechanical angular speed |
| ωr | Rotor angular speed |
| ωs | Synchronous angular speed |
| ωt | Turbine rotational angular speed |
| ζ | Adjustable variable of reference trajectory |
| Acronyms | |
| BTB | Back-to-back |
| DFIG | Doubly fed induction generator |
| DFIG-WECS | Doubly fed induction generator based on the wind energy converter system |
| DPC | Direct power control |
| DTC | Direct torque control |
| GSC | Grid side converter |
| GWEC | Global Wind Energy Council |
| MPC | Model predictive control |
| MPPT | Maximum power point tracking |
| P-DPC | Predictive direct power control |
| PWM | Pulse width modulation |
| RSC | Rotor side converter |
| VSC | Voltage source converter |
| WECS | Wind energy converter system |
| WRIG | Wound rotor induction generator |
Appendix A
- DFIG. Nominal power is 150 kW, voltage is 575 V, stator resistance is 0.02475 Ω, rotor resistance 0.0133 Ω, stator leakage inductance is 0.000284 H, rotor leakage inductance is 0.00284 H, mutual inductance is 0.01425 H, and inertia constant is 2.6 kg.m2.
- Converter. Resistance of grid filter is 0.03 p.u., inductance of grid filter is 0.3 p.u., DC-link’s rated voltage is 500 V, and DC-link capacitor 0.01 F.
- GSC control. The DC-link voltage regulator: Kp = 112.4, Ki = 25.6; the current power regulator (d-axis): Kp = 9.7, Ki = 0.04; the current power regulator (q-axis): Kp = 9.7, Ki = 0.04.
- The pitch angle controller. Kp = 100, Ki = 8, βmax = 45 degrees, βmin = 0 degrees, Tβ = 0.1 s.
- Other Parameters of Per Control method.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Methods | ||
|---|---|---|---|
| Proposed | Model Predictive | Sliding-Mode | |
| Value | |||
| The control period | |||
| The weighting matrices | - | ||
| The prediction P and control horizon M | - | ||
| The first and second coefficient diagonal matrices | - | - | |
| The output matrix | |||
| Another condition constant | - | ||
References
- The Global Wind Report Annual Market Update 2015. Available online: http://www.gwec.net (accessed on 25 April 2016).
- Soliman, M.; Malik, O.P.; Westwick, D.T. Multiple model predictive control for wind turbines with doubly fed induction generators. IEEE Trans. Sustain. Energy 2011, 2, 215–225. [Google Scholar] [CrossRef]
- Vinothkumar, K.; Selvan, M.P. Novel scheme for enhancement of fault ride-through capability of doubly fed induction generator based wind farms. Energy Convers. Manag. 2011, 52, 2651–2658. [Google Scholar] [CrossRef]
- Muller, S.; Deicke, M.; De Doncker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Abad, G.; Lopez, J.; Rodríguez, M.; Marroyo, L.; Iwanski, G. Doubly Fed Induction Machine: Modeling and Control for Wind Energy Generation; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Petru, T.; Thiringer, T. Modeling of wind turbines for power system studies. IEEE Trans. Power Syst. 2002, 17, 1132–1139. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, W.; Venayagamoorthy, G.K. Dynamic modeling of wind farms with fixed-speed wind turbine generators. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–8. [Google Scholar]
- Ackermann, T. Wind Power in Power Systems; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Hu, J.; He, Y.; Xu, L.; Williams, B.W. Improved control of DFIG systems during network unbalance using PI–R current regulators. IEEE Trans. Ind. Electron. 2009, 56, 439–451. [Google Scholar] [CrossRef]
- Chondrogiannis, S.; Barnes, M. Stability of doubly-fed induction generator under stator voltage orientated vector control. IET Renew. Power Gener. 2008, 2, 170–180. [Google Scholar] [CrossRef]
- Hao, S.; Abdi, E.; Barati, F.; McMahon, R. Stator-flux-oriented vector control for brushless doubly fed induction generator. IEEE Trans. Ind. Electron. 2009, 56, 4220–4228. [Google Scholar]
- Hopfensperger, B.; Atkinson, D.J.; Lakin, R.A. Stator-flux-oriented control of a doubly-fed induction machine with and without position encoder. IEE Proc. Electr. Power Appl. 2000, 147, 241–250. [Google Scholar] [CrossRef]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. Electr. Power Appl. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Zhi, D.; Xu, L. Direct power control of DFIG with constant switching frequency and improved transient performance. IEEE Trans. Energy Convers. 2007, 22, 110–118. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A new quick-response and high-efficiency control strategy of an induction motor. IEEE Trans. Ind. Appl. 1986, 820–827. [Google Scholar] [CrossRef]
- Depenbrock, M. Direct self-control (DSC) of inverter-fed induction machine. IEEE Trans. Power Electron. 1988, 3, 420–429. [Google Scholar] [CrossRef]
- Baader, U.; Depenbrock, M.; Gierse, G. Direct self control (DSC) of inverter-fed induction machine: A basis for speed control without speed measurement. IEEE Trans. Ind. Appl. 1992, 28, 581–588. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Kasprowicz, A.B. Improved direct torque and flux vector control of PWM inverter-fed induction motor drives. IEEE Trans. Ind. Electron. 1995, 42, 344–350. [Google Scholar] [CrossRef]
- Vas, P. Sensorless Vector and Direct Torque Control; Oxford Univercity Press: Oxford, UK, 1998. [Google Scholar]
- Buja, G.S.; Kazmierkowski, M.P. Direct torque control of PWM inverter-fed AC motors—A survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Datta, R.; Ranganathan, V.T. Direct power control of grid-connected wound rotor induction machine without rotor position sensors. IEEE Trans. Power Electron. 2001, 16, 390–399. [Google Scholar] [CrossRef]
- Xu, L.; Cartwright, P. Direct active and reactive power control of DFIG for wind energy generation. IEEE Trans. Energy Convers. 2006, 21, 750–758. [Google Scholar] [CrossRef]
- Mohd Zin, A.A.B.; Mahmoud Pesaran, H.A.; Khairuddin, A.B.; Jahanshaloo, L.; Shariati, O. An overview on doubly fed induction generators′ controls and contributions to wind based electricity generation. Renew. Sustain. Energy Rev. 2013, 27, 692–708. [Google Scholar] [CrossRef]
- Zhi, D.; Xu, L.; Williams, B.W. Model-based predictive direct power control of doubly fed induction generators. IEEE Trans. Power Electron. 2010, 25, 341–351. [Google Scholar]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model-predictive direct power control of doubly-fed induction generators under unbalanced grid voltage conditions in wind energy applications. IET Renew. Power Gener. 2014, 8, 687–695. [Google Scholar] [CrossRef]
- Abad, G.; Rodríguez, M.Á.; Poza, J. Three-level NPC converter-based predictive direct power control of the doubly fed induction machine at low constant switching frequency. IEEE Trans. Ind. Electron. 2008, 55, 4417–4429. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Rodriguez, J.; Cortes, P. Predictive Control of Power Converters and Electrical Drives; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 40. [Google Scholar]
- Wang, X.; Sun, D. Three-Vector-Based Low-Complexity Model Predictive Direct Power Control Strategy for Doubly Fed Induction Generators. IEEE Trans. Power Electron. 2017, 32, 773–782. [Google Scholar] [CrossRef]
- ALarrinaga, S.; Vidal, M.A.R.; Oyarbide, E.; Apraiz, J.R.T. Predictive control strategy for DC/AC converters based on direct power control. IEEE Trans. Ind. Electron. 2012, 54, 1261–1271. [Google Scholar] [CrossRef]
- Sguarezi Filho, A.J.; Ruppert Filho, E. Model-based predictive control applied to the doubly-fed induction generator direct power control. IEEE Trans. Sustain. Energy 2012, 3, 398–406. [Google Scholar] [CrossRef]
- Hu, J.; Nian, H.; Hu, B.; He, Y.; Zhu, Z.Q. Direct active and reactive power regulation of DFIG using sliding-mode control approach. IEEE Trans. Energy Convers. 2010, 25, 1028–1039. [Google Scholar] [CrossRef]
- Shang, L.; Hu, J. Sliding-mode-based direct power control of grid-connected wind-turbine-driven doubly fed induction generators under unbalanced grid voltage conditions. IEEE Trans. Energy Convers. 2012, 27, 362–373. [Google Scholar] [CrossRef]
- Le, V.; Li, X.; Li, Y.; Dong, T.L.T.; Le, C. An Innovative Control Strategy to Improve the Fault Ride-Through Capability of DFIGs Based on Wind Energy Conversion Systems. Energies 2016, 9, 69. [Google Scholar] [CrossRef]
- Iov, F.; Hansen, A.D.; Sorensen, P.; Blaabjerg, F. Wind Turbine Blockset in Matlab/Simulink; Aalborg University: Aalborg, Denmark, 2004. [Google Scholar]
- Miller, N.W.; Price, W.W.; Sanchez-Gasca, J.J. Dynamic Modeling of GE 1.5 and 3.6 Wind Turbine-Generators; GE—International, Power Systems Energy Consulting: Schenectady, NY, USA, 2003. [Google Scholar]
- Tohidi, A.; Abedinia, O.; Bekravi, M.; Ojaroudi, N. Multivariable adaptive variable structure disturbance rejection control for DFIG system. Complexity 2014. [CrossRef]
- Wu, B.; Lang, Y.; Zargari, N.; Kouro, S. Power Conversion and Control of Wind Energy System; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Hindmarsh, J. Worked Examples in Electrical Machines and Drives: Applied Electricity and Electronics; Elsevier: Amsterdam, The Netherlands, 1982. [Google Scholar]
- Yamamura, S. Spiral Vector Theory of AC Circuits and Machines; Oxford University Press: Oxford, UK, 1992. [Google Scholar]
- Holtz, J.; Quan, J.; Pontt, J.; Rodr´ıguez, J.; Newman, P.; Miranda, H. Design of fast and robust current regulators for high-power drivesbased on complex state variables. IEEE Trans. Ind. Appl. 2004, 40, 1388–1397. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powel, J.D.; Workman, M.L. Digital Control of Dynamic Systems; Addison-Wesley: Boston, MA, USA, 1998; Volume 3. [Google Scholar]
- Perruquetti, W.; Barbot, J.P. Sliding Mode Control in Engineering; CRC Press: Beijing, China, 2002. [Google Scholar]
- Seborg, D.E.; Mellichamp, D.A.; Edgar, T.F.; Doyle, F.J., III. Process Dynamics and Control; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Li, S.; Zheng, Y. Distributed Model Predictive Control for Plant-Wide Systems; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Xi, Y.G. Predictive Control; PRC Press: Beijing, China, 1993. [Google Scholar]
- Maciejowski, J.M. Predictive Control with Constraints; Prentice-Hall: Harlow, UK, 2002. [Google Scholar]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Ogliari, E. Pitch angle control using hybrid controller for all operating regions of SCIG wind turbine system. Renew. Energy 2014, 70, 197–203. [Google Scholar] [CrossRef]
- Duong, M.Q.; Grimaccia, F.; Leva, S.; Mussetta, M.; Le, K.H. Improving transient stability in a grid-connected squirrel-cage induction generator wind turbine system using a fuzzy logic controller. Energies 2015, 8, 6328–6349. [Google Scholar] [CrossRef] [Green Version]















| i/j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | −4.1909 × 10−1 | 2.1808 × 10−1 | −1.2406 × 10−2 | −1.3365 × 10−4 | 1.1524 × 10−5 |
| 1 | −6.7606 × 10−2 | 6.0405 × 10−2 | −1.3934 × 10−2 | 1.0683 × 10−3 | −2.3895 × 10−5 |
| 2 | 1.5727 × 10−2 | −1.0996 × 10−2 | 2.1495 × 10−3 | −1.4855 × 10−4 | 2.7937 × 10−6 |
| 3 | −8.6018 × 10−4 | 5.7051 × 10−4 | −1.0479 × 10−4 | 5.9924 × 10−6 | −8.9194 × 10−8 |
| 4 | 1.4787 × 10−5 | −9.4839 × 10−6 | 1.6167 × 10−6 | −7.1535 × 10−8 | 4.9686 × 10−10 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Liu, G.; Li, A.; Dai, L.V. A Predictive Power Control Strategy for DFIGs Based on a Wind Energy Converter System. Energies 2017, 10, 1098. https://doi.org/10.3390/en10081098
Yang X, Liu G, Li A, Dai LV. A Predictive Power Control Strategy for DFIGs Based on a Wind Energy Converter System. Energies. 2017; 10(8):1098. https://doi.org/10.3390/en10081098
Chicago/Turabian StyleYang, Xiaoliang, Guorong Liu, Anping Li, and Le Van Dai. 2017. "A Predictive Power Control Strategy for DFIGs Based on a Wind Energy Converter System" Energies 10, no. 8: 1098. https://doi.org/10.3390/en10081098
APA StyleYang, X., Liu, G., Li, A., & Dai, L. V. (2017). A Predictive Power Control Strategy for DFIGs Based on a Wind Energy Converter System. Energies, 10(8), 1098. https://doi.org/10.3390/en10081098