A Methodology for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit

Abstract
:1. Introduction
2. Algorithm for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit on Power Plane
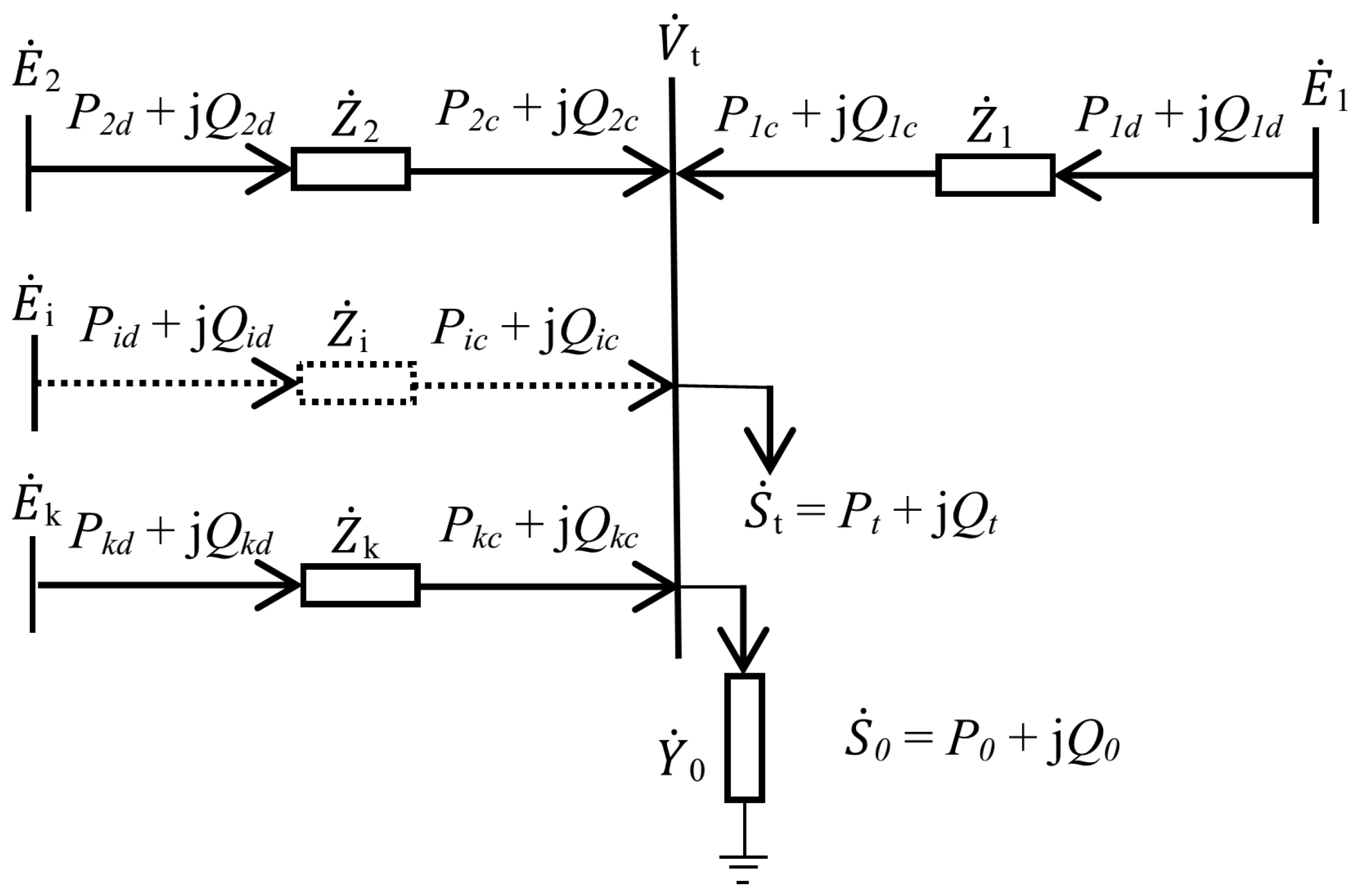
2.1. Determining Points on Stability Boundary
- Ei is the electromotive force of generators connected at the ith generation bus (i = 1 ÷ k);+ j is the equivalent impedance of the branch connecting generation bus i and the considered load at bus t;
- Pid and Qid are the real and reactive power transferred from generation bus i to the considered load at bus t and before equivalent impedance , respectively;
- Pic and Qic are the real and reactive power transferred from generation bus i to the considered load at bus t and after equivalent impedance , respectively;
- Pt, Qt, and St are the real, reactive, and apparent power of the considered load at bus t;
- is the equivalent admittance-to-ground at the considered load bus t, , where + j is the corresponding equivalent impedance;
- P0, Q0, and S0 are the real, reactive, and apparent power transferred through .
- Qjd ≤ Qjmin set Qjd = Qjmin
- Qjd ≥ Qjmax set Qjd = Qjmax
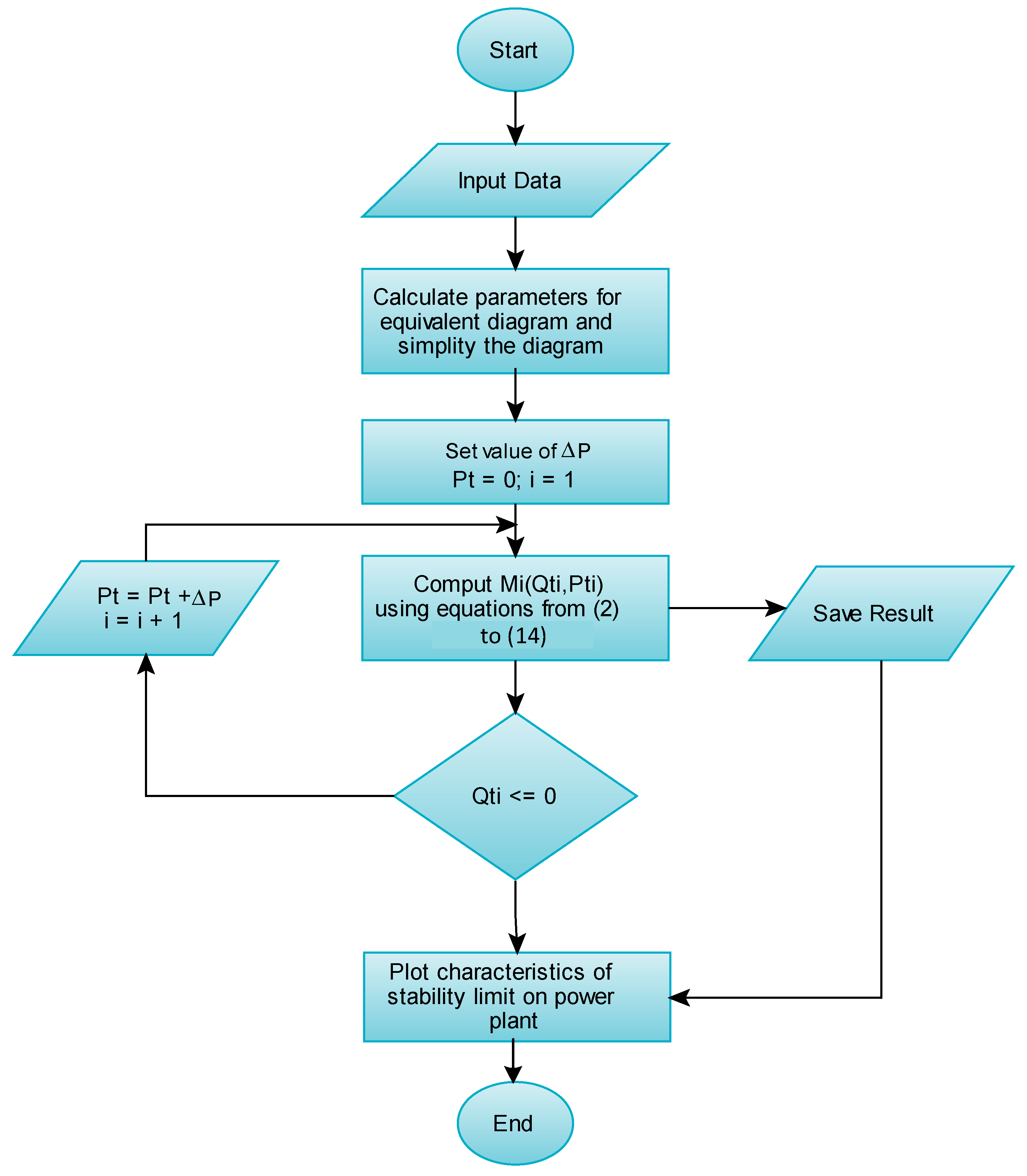
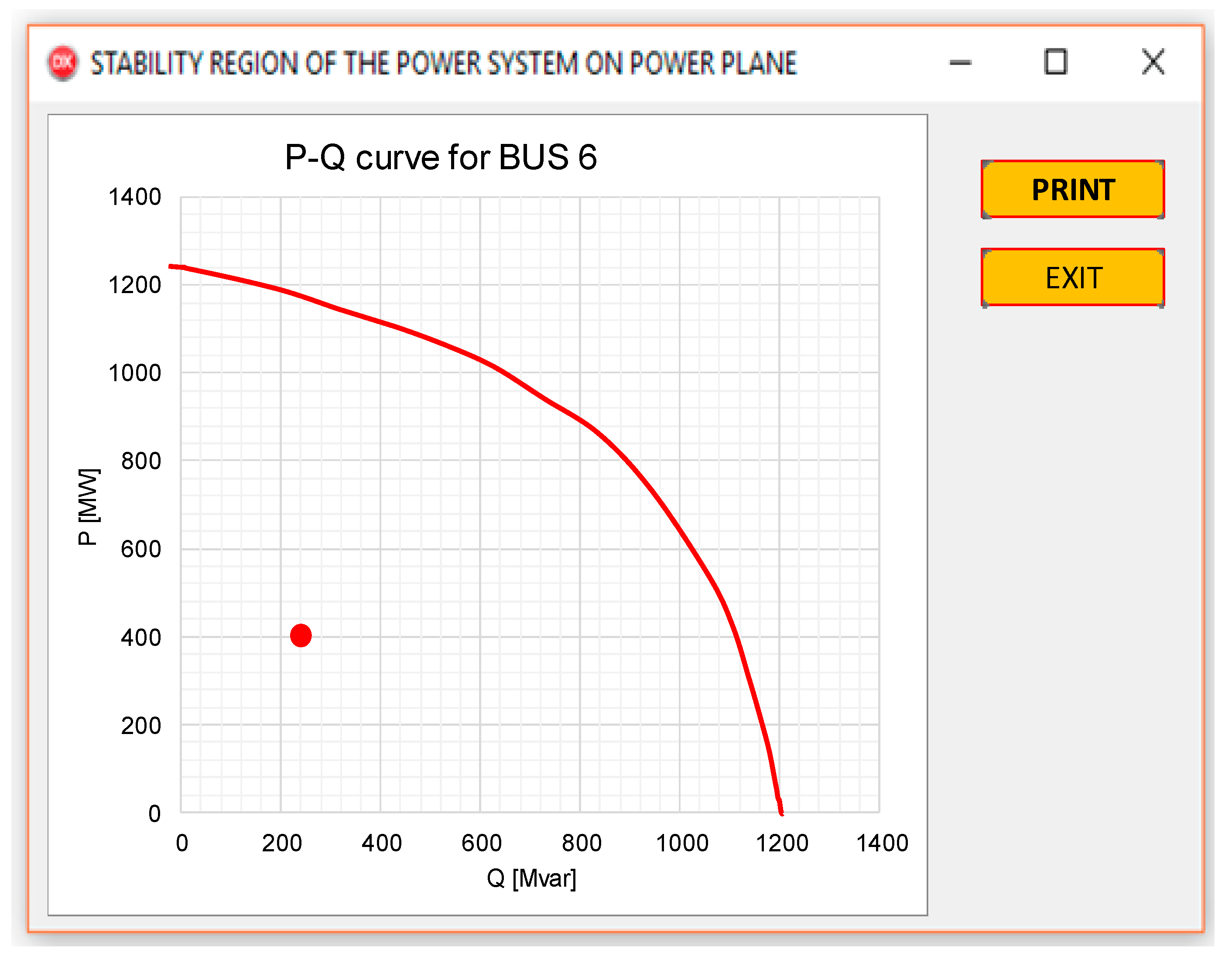
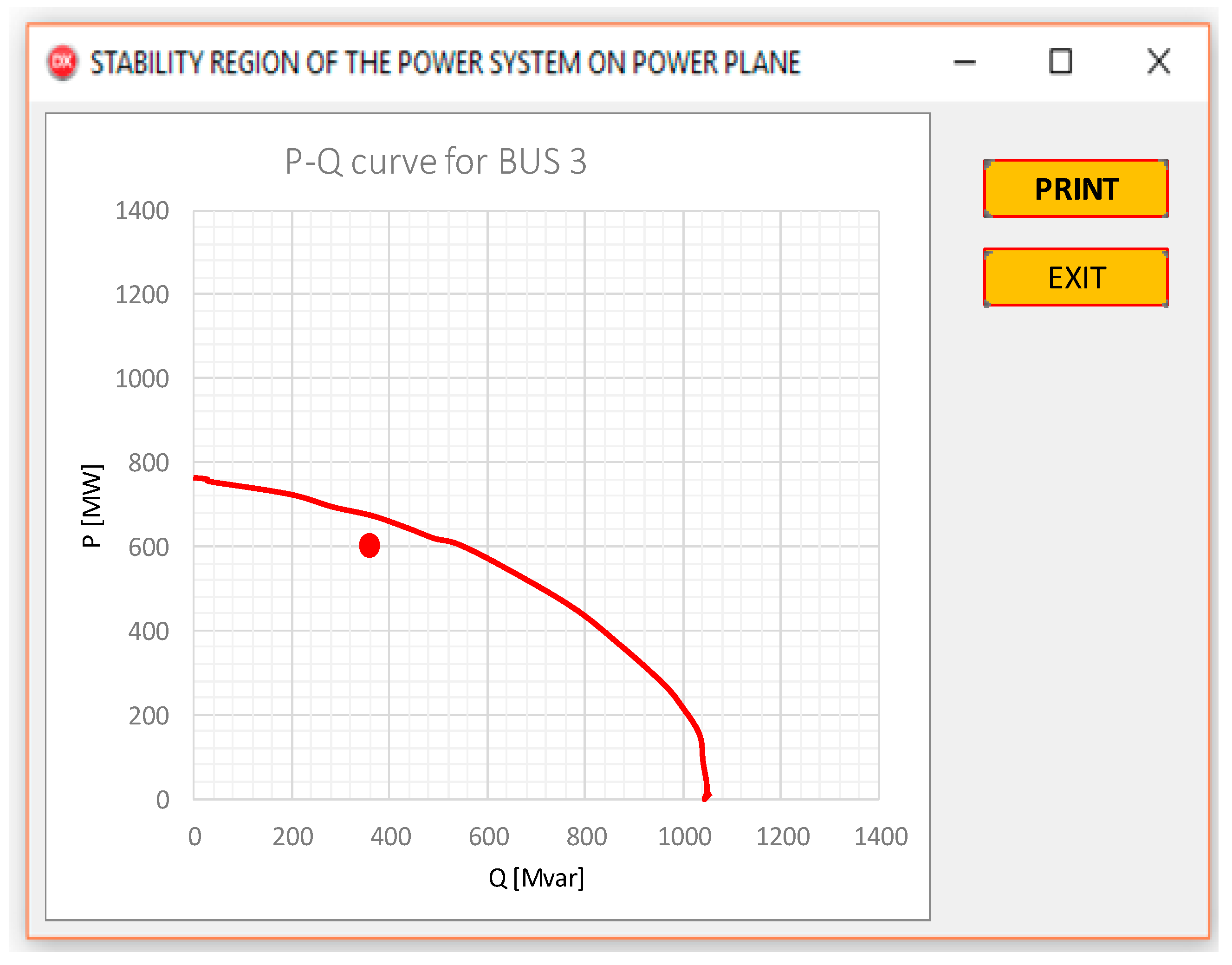
2.2. Development of Algorithm for Drawing Characteristics of Stability Limit
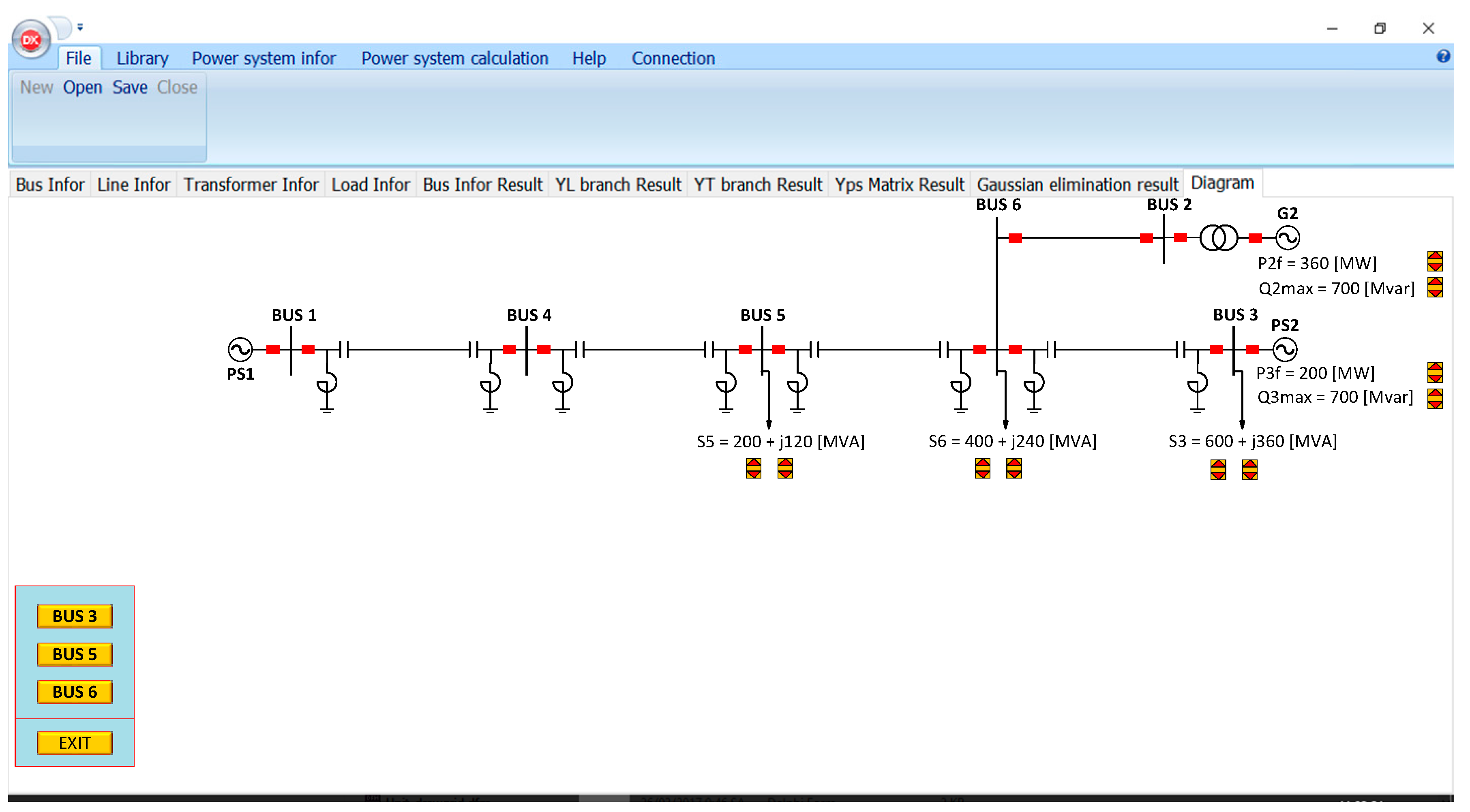
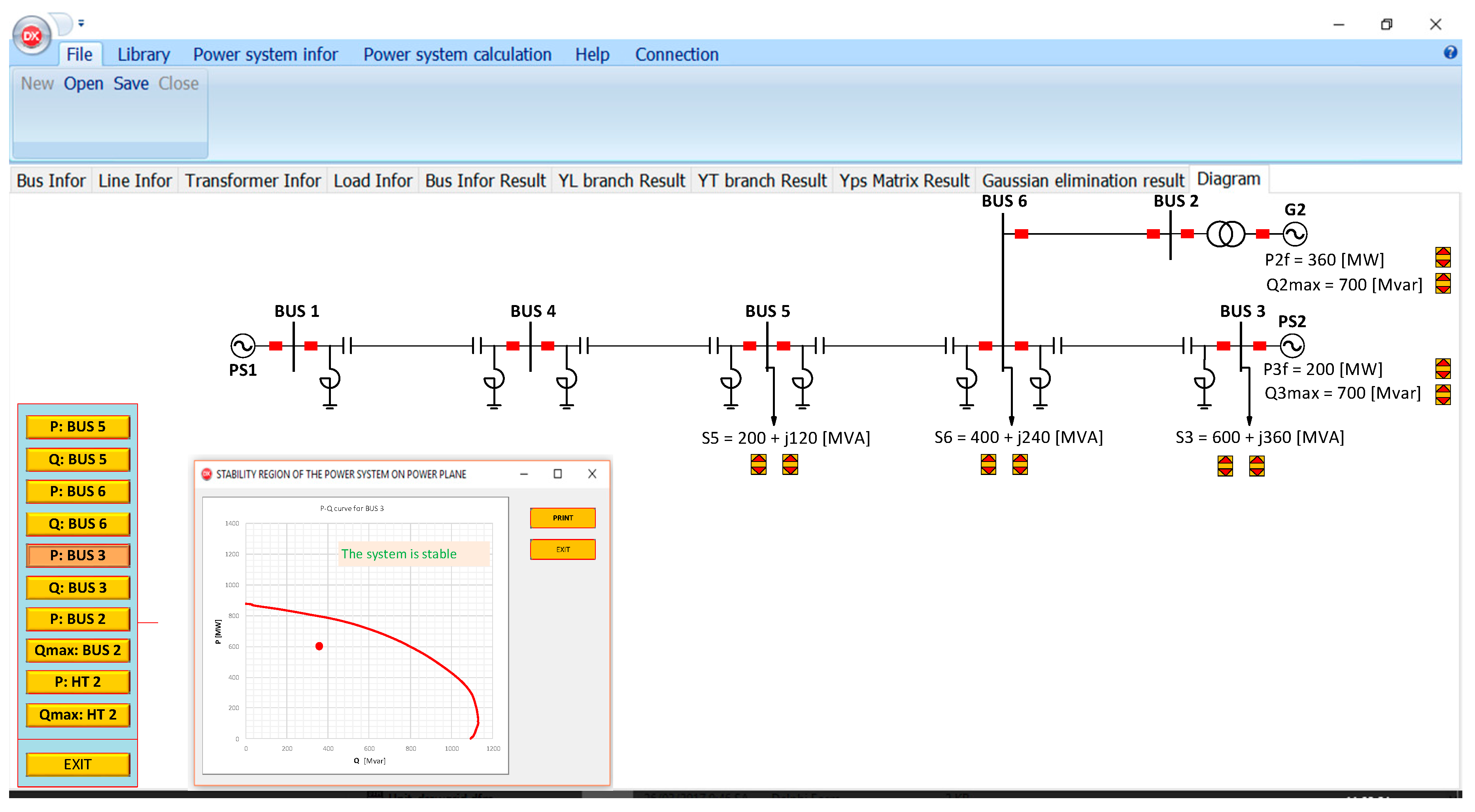
3. Application to Building a Program for Determining Permissible Operating Region of Power Systems on Power Plane
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Oluic, M.; Ghandhari, M.; Berggren, M. Methodology for Rotor Angle Transient Stability Assessment in Parameter Space. IEEE Trans. Power Syst. 2017, 32, 1202–1211. [Google Scholar] [CrossRef]
- Meegahapola, L.; Littler, T. Characterisation of large disturbance rotor angle and voltage stability in interconnected power networks with distributed wind generation. IET Renew. Power Gen. 2015, 9, 272–283. [Google Scholar] [CrossRef]
- Jóhannsson, H.; Nielsen, A.H.; Østergaard, J. Wide-area assessment of aperiodic small signal rotor angle stability in real-time. In Proceedings of the 2014 IEEE PES General Meeting, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- Hatziargyriou, N.; Karapidakis, E.; Hatzifotis, D. Frequency stability of power systems in large islands with wind power penetration. In Proceedings of the Bulk Power System Dynamics Control Symposium-IV, Restructuring, Santorini, Greece, 24–28 August 1998. [Google Scholar]
- Hu, J.; Cao, J.; Guerrero, J.M.; Yong, T.; Yu, J. Improving Frequency Stability Based on Distributed Control of Multiple Load Aggregators. IEEE Trans. Smart Grid 2017, 8, 1553–1567. [Google Scholar] [CrossRef]
- Taylor, C.W. Power System Voltage Stability; McGraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Modarresi, J.; Gholipour, E.; Khodabakhshian, A. A comprehensive review of the voltage stability indices. Renew. Sust. Energ. Rev. 2016, 63, 1–12. [Google Scholar] [CrossRef]
- Karbalaei, F.; Soleymani, H.; Afsharnia, S. A comparison of voltage collapse proximity indicators. In Proceedings of the International Power Electronics Conference (IPEC), Singapore, 27–29 October 2010. [Google Scholar]
- Clark, H.K. New challenge: Voltage stability. IEEE Power Eng. Rev. 1990, 19, 30–37. [Google Scholar]
- Gupta, R.K.; Alaywan, Z.A.; Stuart, R.B.; Reece, T.A. Steady state voltage instability operations perspective. IEEE Trans. Power Syst. 1990, 5, 1345–1354. [Google Scholar] [CrossRef]
- Pourbeik, P.; Meyer, A.; Tilford, M.A. Solving a Potential Voltage Stability Problem with the Application of a Static VAr Compensator. In Proceedings of the IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 27–31 January 2007; pp. 1–8. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill Inc.: New York, NY, USA, 1994. [Google Scholar]
- Toma, R.; Gavrilaș, M. Voltage Stability Assessment for Wind Farms Integration in Electricity Grids with and without Consideration of Voltage Dependent Loads. In Proceedings of the International Conference and Exposition on Electrical and Power Engineering (EPE 2016), Iasi, Romania, 20–22 October 2016. [Google Scholar]
- Rawat, M.S.; Vadhera, S. Analysis of wind power penetration on power system voltage stability. In Proceedings of the IEEE 6th International Conference on Power Systems (ICPS), New Delhi, India, 4–6 March 2016. [Google Scholar]
- Balamourougan, V.; Sidhu, T.; Sachdev, M. Technique for online prediction of voltage collapse. IEE Proc.-Gener. Transm. Distrib. 2004, 151, 453–460. [Google Scholar] [CrossRef]
- Zhang, P.; Min, L.; Chen, J. Measurement Based Voltage Stability Monitoring and Control. U.S. Patent Application No. US 2009/0299664A1, December 2009. [Google Scholar]
- Cutsem, T.V.; Vournas, C. Voltage Stability of Electric Power Systems; Kluwer Academic: Boston, MA, USA, 1998. [Google Scholar]
- Glavic, M.; Lelic, M.; Novosel, D.; Heredia, E.; Kosterev, D. A Simple Computation and Visualization of Voltage Stability Power Margins in Real-Time. In Proceedings of the IEEE PES Transmission and Distribution Conference and Exposition (T&D), Orlando, FL, USA, 7–10 May 2012; pp. 1–7. [Google Scholar]
- Lin, Y.Z.; Shi, L.B.; Yao, L.Z.; Ni, Y.X.; Qin, S.Y.; Wang, R.M.; Zhang, J.P. An Analytical Solution for Voltage Stability Studies Incorporating Wind Power. J. Electr. Eng. Technol. 2015, 10, 30–40. [Google Scholar] [CrossRef]
- Machowski, J.; Bialek, J.W.; Bumby, J.R. Power System Dynamics and Stability; John Wiley & Sons Ltd.: Chichester, UK, 1997. [Google Scholar]
- Pham, V.K.; Ngo, V.D.; Le, D.D.; Huynh, V.K. Studying and building program for simplifying electrical network diagram using Gaussian elimination algorithm. J. Sci. Technol. Univ. Danang 2015, 6, 24–28. [Google Scholar]
- Power System Test Case Archive. Available online: https://www2.ee.washington.edu/research/pstca/pf118/pg_tca118bus.htm (accessed on 6 February 2017).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bus 3 | Bus 5 | Bus 6 | Q2max (Mvar) | P2f (MW) | Q3max (Mvar) | P2f (MW) | |||
|---|---|---|---|---|---|---|---|---|---|
| P (MW) | Q (Mvar) | P (MW) | Q (Mvar) | P (MW) | Q (Mvar) | ||||
| 600 | 360 | 200 | 120 | 400 | 240 | 700 | 360 | 700 | 200 |
| Paramaters | Comparison of Results | |
|---|---|---|
| Proposed Approach | PSS/E | |
| P0 (MW) | 600 | 600 |
| Q0 (Mvar) | 360 | 360 |
| S0 (MVA) | 699.7 | 699.7 |
| Plim (MW) | 800 | 833 |
| Qlim (Mvar) | 800 | 821 |
| Pi (MW) | 772 | 791 |
| Qi (Mvar) | 448 | 475 |
| Si (MVA) | 892.6 | 923 |
| KP (%) | 27.5 | 31.8 |
| KQ (%) | 33.4 | 38.8 |
| KS (%) | 122.3 | 128 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngo, V.D.; Le, D.D.; Le, K.H.; Pham, V.K.; Berizzi, A. A Methodology for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit. Energies 2017, 10, 1163. https://doi.org/10.3390/en10081163
Ngo VD, Le DD, Le KH, Pham VK, Berizzi A. A Methodology for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit. Energies. 2017; 10(8):1163. https://doi.org/10.3390/en10081163
Chicago/Turabian StyleNgo, Van Duong, Dinh Duong Le, Kim Hung Le, Van Kien Pham, and Alberto Berizzi. 2017. "A Methodology for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit" Energies 10, no. 8: 1163. https://doi.org/10.3390/en10081163
APA StyleNgo, V. D., Le, D. D., Le, K. H., Pham, V. K., & Berizzi, A. (2017). A Methodology for Determining Permissible Operating Region of Power Systems According to Conditions of Static Stability Limit. Energies, 10(8), 1163. https://doi.org/10.3390/en10081163