1. Introduction
Wave energy is anticipated to contribute towards the transition to carbon-free electricity generation. The theoretical wave energy resource across the oceans is estimated to be in the order of 1–10 TW [
1,
2], which is in the same order as the current global electric power generation [
3]. Such potential has drawn the attention of the research community, which has shown that electric power production from waves is possible [
4,
5,
6,
7]. However, wave energy is still deemed costly compared to other sources of renewable energy, such as wind or solar. This makes the technological shift from development to commercialisation progress slowly.
The integration of wave energy converters (WECs) into coastal and offshore structures is a relevant solution to reduce the cost of the electricity produced by the WECs [
8,
9,
10,
11]. Working towards the same end, arrays of WECs, also known as wave farms, are considered. Wave farms may consist of a few to tens, or even hundreds, of wave energy converters, which are placed in the same geographical location. Because the WECs are in the same location, part of the cost of installation, operation and maintenance can be shared. If each device within an array produced as much electricity as (or more than) a single device, this would result in a reduction of the cost of electricity. Conversely, if each device within an array produced less, this could result in an increase in the cost of electricity. As WEC interactions mainly depend on the orientations and distances between one another [
12,
13,
14], the advantages of using arrays will strongly depend on the ability to design optimal arrangements.
The problem of finding optimal positions of WECs in arrays was studied in [
15] and [
16]. In both papers, optimal positions were chosen in order to maximise the power absorption for a given number of WECs within the context of linearised potential flow theory. In [
15], arrays of heaving cylinders were optimised using a method called “parabolic intersection” and a genetic algorithm (GA), the latter producing better results, although at a higher computational cost. In [
16], arrays of point absorbers were optimised using a bespoke heuristic method combined with the point-absorber approximation [
17] that simplified the power calculation. The optimisation strategies developed in [
15] and [
16] have been proven as efficient; however, they are limited to the analysis of heaving cylinders and small WECs with respect to the wavelength, respectively.
An alternative approach was proposed in [
18], in which the positioning of the WECs was based on a discretisation of the array deployment area into a number of cells, where each cell was assigned 1 or 0 depending on whether or not it contained a WEC. This array representation was then used to develop a binary GA. Unlike in [
15,
16], optimal positions were chosen to minimise the ratio of cost to power. The method developed in [
19] was used to simplify the power calculation, without further assumptions than those associated with linearised potential flow theory. The cost was modelled as proportional to the square root of the number of WECs on the basis of preliminary array cost results from Sandia National Laboratories’s Reference Model Project (RMP) [
20]. Because the developed GA could only handle a fixed number of WECs, minimising the ratio of cost to power was therefore the same as maximising the power, as was employed in [
15,
16].
The present work has been carried out in cooperation with the research project DTOcean (Optimal Design Tools for Ocean Energy Arrays) [
21], which has developed a set of tools [
22] that provide optimal design solutions for arrays of wave and tidal devices. Several design aspects, such as the array layout, the electrical network, moorings/foundations, the lifecycle logistics and installation and maintenance, are considered simultaneously within DTOcean’s software to minimise the cost of electricity.
This paper focuses only on the layout optimisation of WEC arrays and demonstrates the effectiveness of the optimisation strategy adopted by DTOcean’s software. As in [
15,
16], optimal positions are chosen to maximise the power absorption; however, here, the number of WECs is not predefined. Instead,
q-factors, the distances between the WECs, and the deployment area are constrained, which is a more realistic approach for the design of WEC arrays than using a predefined number of WECs. The first two are constrained by a minimum threshold, and the last, by a set of limiting areas. Similarly to [
18], the method developed in [
19] is used for an efficient power calculation. Moreover, the WECs’ positioning is based on a four-parameter array layout description that simplifies the optimisation problem. Three different optimisation algorithms are presented and further compared, namely, the covariance matrix adaptation evolution strategy (CMA) [
23], a GA, and the glowworm swarm optimisation (GSO) [
24]. The first is the optimisation algorithm implemented into DTOcean’s software, the second is the current standard for array layout optimisation because of its robustness [
15,
18], and the last has been shown to be particularly suited for optimisation problems with multiple local optima, such as in the present case.
Because the array layout optimisation strategy presented here is part of a bigger optimisation scheme that also takes into account other array design aspects, the decisions taken on the considered methods have been driven by easy integration and computational efficiency. The power calculation benefits from the fastest approach developed so far [
19] within the range of validity defined by linearised potential flow theory [
25]. The constraints on the
q-factor, the distances between WECs, and the deployment area make up the means by which DTOcean’s software takes into account other design aspects’ effects on the array layout. The four-parameter array layout description significantly reduces the problem’s dimensionality, while it is in line with the regularity displayed by optimal solutions in previous studies [
15,
16,
18]. The optimisation methods tested herein have been chosen as they need neither derivatives nor prior knowledge about the objective function’s behaviour. Derivatives would have to be approximated by finite differences, which would be computationally costly and would lead to approximation errors. Prior knowledge about the objective function’s behaviour could be accounted for if the optimiser was meant for a specific WEC, as in [
15,
16], however, the present optimiser is intended to deal with any type of WEC.
The work presented in this paper is structured into seven sections.
Section 2 provides a brief description of the wave–WEC array interaction model and the equations used to calculate the absorbed power.
Section 3 formulates the array layout optimisation problem and presents the strategy to solve it.
Section 4 provides the details for modelling surging barges and the wave climate for the island of Île d’Yeu in France.
Section 5 discusses the array layout optimisation results in terms of performance, computational effort and optimal array layout solutions. Finally,
Section 6 summarises the main finding of the paper.
2. Array Power Absorption
In this section, the main equations for the prediction of the average power absorbed by an array of floating WECs over a year are presented. This will be referred to as “yearly power production” and it will be used further to select optimal array layouts (
Section 3).
The equations are developed under the following considerations:
The main forces are due to the action of gravity, the power take-off (PTO) system, and the interaction between the waves and the WECs.
The forces are computed within the context of linearised potential flow theory, a constant water depth, and small amplitude motions compared to the wavelength and the water depth.
The PTO is represented separately for each mode of motion in the array as a linear damper and a spring in parallel.
Here, the PTO system refers to the set of mechanisms whereby the motion of the WEC is transformed into electrical energy.
The equations of motion associated with the array of floating WECs when excited by a unit-amplitude plane wave with frequency
follow from Newton’s second law:
where the vector
contains the complex amplitude for every mode of motion in the array (
),
M is the mass matrix,
is the added mass matrix,
is the radiation damping matrix,
is the PTO damping matrix,
is the hydrostatic stiffness matrix,
is the PTO stiffness matrix,
is the diffraction force vector (
),
is the imaginary unit, and
t is time. Both
and
are diagonal matrices according to the separate PTO models for each mode of motion in the array;
is the force due to the action of gravity,
is the force due to the action of the PTO system,
is the force due to the interaction between the plane wave and the WECs at rest, and
is the force due to the motion of the WECs in still water.
The power absorbed by the array of WECs from that unit-amplitude plane wave is calculated as the power dissipated through the PTO dampers. The mean absorbed power over the period
can then be expressed as
where
indicates the conjugate transpose of
.
Given a sea state discretised by a finite number of equally spaced wave frequencies
, where
is the constant increment of the discretisation and
; and being characterised by its variance spectrum
, where
A denotes the amplitude of the wave,
denotes the peak period and
denotes the significant wave height; the mean absorbed power over the period
can be calculated through
Given the probability of occurrence over a year for each sea state
at the site at which the WECs are to be deployed, the yearly power production results from
If wave directionality is considered for sea-state characterisation, Equations (
3) and (
4) must also sum over the considered range of wave directions using a directional spreading function and associated probabilities, respectively.
In addition to the yearly power production, another important measure when optimising the array layout is the
q-factor. Given an array of
N WECs, this is defined as the ratio of the wave power absorbed by the array to
N times that produced by a single-WEC array
:
The denominator in the q-factor provides the total power that would be produced if the WECs were not interacting. Therefore, a q-factor smaller than 1 indicates that the hydrodynamic interactions between the WECs have an overall negative effect on the power absorption of the array, whilst a q-factor greater than 1 shows otherwise.
The added mass matrix
, the radiation damping matrix
, and the diffraction force vector
are computed using the exact algebraic method developed in [
26], known as the direct matrix method, and the numerical strategy described in [
19], combined with the open-source boundary element method software NEMOH [
27]. The first is used to solve the hydrodynamic interactions between the WECs, while the second is used to provide the first with the hydrodynamic response of one WEC in isolation.
Given a local analytical representation of the outgoing wave-field outside the WECs as an infinite sum of cylindrical partial waves, an interaction theory is formulated in [
26] that enables the solving of the amplitudes of every cylindrical partial wave at every WEC simultaneously (direct matrix method). On the basis of the assumption of linear waves, the interaction theory constructs the local incoming wave-field outside the WECs as a superposition of outgoing waves generated by the other WECs. Finally, a linear transformation between incoming and outgoing wave amplitudes of one WEC in isolation, therein called the “diffraction transfer matrix”, is suggested in [
26] to fully determine the solution of the interaction problem. The derivation of the WEC’s diffraction transfer matrix from standard boundary element method codes, such as NEMOH [
27], and the derivation of wave forces,
and
, from the wave amplitudes are further facilitated by the strategy proposed in [
19].
The use of the direct matrix method [
26] and the strategy described in [
19] turns out to be less computationally demanding than using NEMOH to solve the entire array. As most of the computational effort when evaluating
P is put into the calculation of
,
and
, the use of the direct matrix method [
26] and the strategy described in [
19] significantly reduces the overall computational cost of the optimisation process.
3. Optimisation Problem
The optimisation problem is stated as “finding the number
N and position
of WECs over the area of interest
, maximising the yearly power production
P subject to a minimum
q-factor
and a minimum WECs’ inter-distance
”:
where
are Cartesian coordinates of the position of WEC
i, and
is the distance between WECs
i and
j.
Alternatively, if the number of WECs is held fixed to
, substituting Equation (
5) in the optimisation problem of Equation (
6) yields
which is the way the problem has commonly been posed in the layout optimisation of WEC arrays [
15,
16].
The number of WECs can have a strong impact on the overall cost of the project, and thus it seems reasonable to consider this for optimisation. Nonetheless, in order to prevent the array layout solution from growing infinitely large, the area of allowed deployment is limited by . This in turn has the advantage of facilitating the implementation of the lease area associated with the wave energy project. In addition, limits are also set on the minimum separation between the WECs and the q-factor to prevent the array layout solution from overfilling.
3.1. Array Layout Description
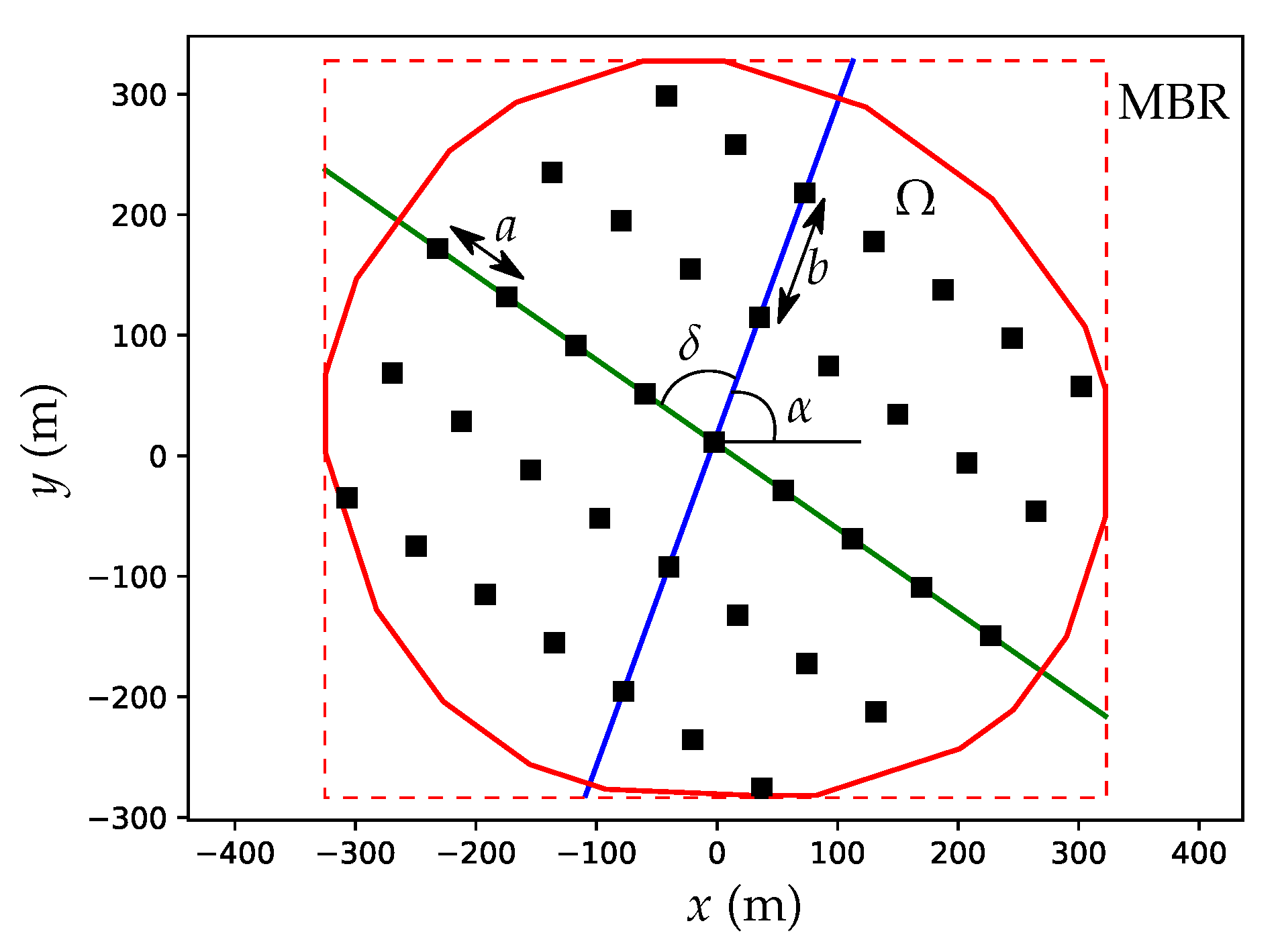
We consider a structured array arranged using rows and columns, where the WECs are placed on the intersections (
Figure 1). Such array layouts can be parametrised according to the following four parameters:
a: distance between rows.
b: distance between columns.
: row’s angle with respect to the x-axis.
: angle between rows and columns.
The x-axis is assumed to be aligned with the main direction of propagation of the ambient waves, and the y-axis is the perpendicular direction to it. If wave directionality is considered for sea-state characterisation, the main direction of propagation associated with the highest probability of occurrence is chosen.
Given the minimum bounding rectangle (MBR) containing the area of deployment , the WEC array is generated by placing a WEC at the southwestern corner of that rectangle and drawing rows and columns until the number of WECs in remains unchanged; that is, until is fully filled by WECs. The total number of WECs, N, is thereby determined by , a, b, and .
The optimisation problem of Equation (
6) can then be rewritten as
where
D is the largest side of the MBR and
f is a penalty function such that
The parameter
can be adjusted to improve the performance of the optimiser. By reducing
, the optimiser is less reluctant to explore the region
, whereas by increasing
, the more reluctant it becomes. As shown in
Section 5, optimal solutions are found close to the region
. Hence,
should be chosen so as to allow the optimiser to search nearby that region while still producing optimal layouts satisfying the condition
. It was found that
normally led to a good compromise, and so this has been set as the default value.
The upper and lower bounds in the search space (Equation (
8)) define a four-dimensional bounding box. These are chosen to prevent array layout repetition and to assure the minimum allowed distance between WECs. To prevent rounding errors and to generalise the optimisation problem, the following normalisation is advised:
When applying the penalty function,
, normalisation by
, that is,
, is also advised to prevent rounding errors and to generalise the optimisation problem;
may be interpreted as the array’s “effective” number of WECs—that is, the array’s number of WECs producing
.
Overall, the optimisation problem reduces to maximising
inside the box
:
Three different optimisation algorithms have been chosen for further comparison: the CMA [
23], a GA, and the GSO [
24].
3.2. Covariance Matrix Adaptation Evolution Strategy
The CMA [
23] acts on populations of
individuals:
such that each individual is assigned a point in the search space and a fitness value, i.e., the objective function
evaluated at that point. The population then evolves in an attempt to produce better individuals at each generation
g (iteration), that is to produce individuals with larger fitness values.
The CMA generates the individuals of the population by sampling the search space assuming the population is normally distributed:
with mean
and covariance matrix
. Adaptation of the population implies updating the mean and the covariance matrix at each generation so that better individuals are more likely to be generated at later generations. Successful adaptations of the mean and the covariance matrix are achieved by maximising the likelihood of the best individuals and the directions of greatest improvement found at each generation, respectively. For a detailed description of the equations involving the updating of the mean and the covariance matrix, the reader is referred to [
23].
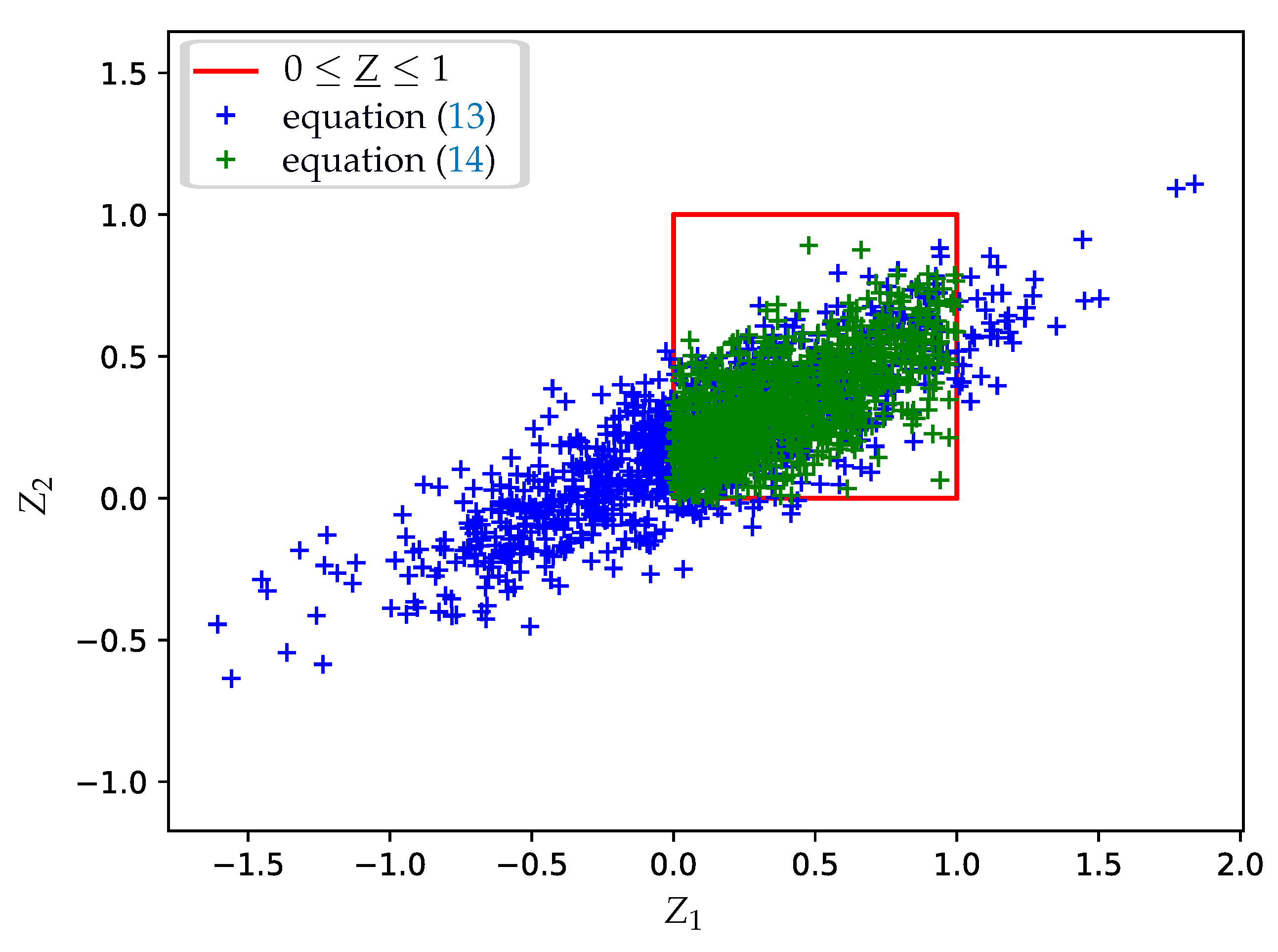
The adaptation strategy is therefore underpinned by a maximum-likelihood principle assuming a normally distributed population. In order to guarantee normality as well as to ensure individuals are generated inside the box
, a truncated multivariate normal distribution [
28] (
Figure 2) is used instead:
The CMA algorithm [
23] can be summarised into six steps:
Initialise , and .
Generate a population of
individuals using Equation (
14).
Evaluate the objective function and set fitness value to all individuals.
Update
,
and
from the generated population [
23].
If any termination condition is met, go to the next step; otherwise repeat steps 2–5.
Retrieve the best encountered individual (optimal solution) and finish.
The following termination conditions have been used:
The objective function has been evaluated more than times.
The standard deviation of a, b, and are smaller than , , and , respectively.
From generation and for every generations, the best fitness value has not been improved in the last generations (stagnation), where is the closest integer to .
3.3. Genetic Algorithm
Similarly to the CMA, the GA acts on populations of
individuals, as described by Equation (
12). Each individual is associated with a point in the search space and with a fitness value. The main goal of the GA is then to produce better individuals at each generation.
In the GA, the
(
) best individuals of the population are selected to breed the next generation of individuals:
where
stands for the
th best individual in the population and
is the reproduction operator, which performs the following operations:
Select two individuals (parents) from with associated probabilities .
Create a new individual as a copy of the parent with the largest fitness value.
Change parameters of the new individual by those of the parent with the smallest fitness value (crossover); is a random choice between 1 and 2. Which parameter is swapped is a random choice among a, b, and . The random choice is performed assuming a uniform distribution over all possible options without replacement.
Change a parameter of the new individual by a random value uniformly distributed within the box (mutation), or change nothing. Whether or not mutation occurs is a random choice with associated probabilities of 0.7 or 0.3, respectively. Which parameter mutates is a random choice among a, b, and .
The GA algorithm is summarised into the following steps:
Initialise population of individuals.
Evaluate objective function and set fitness value to all individuals.
Select the best individuals.
Generate population of
individuals from the
best individuals using Equation (
15).
If any termination condition is met, go to the next step; otherwise repeat steps 2–5.
Retrieve the best encountered individual (optimal solution) and finish.
The following termination conditions have been used:
The objective function has been evaluated more than times.
From generation and for every generations, the best fitness value has not been improved in the last generations (stagnation), where is the closest integer to .
The population size
used in this paper was 10 times the number of dimensions of
,
and
This choice of parameters was inspired by that proposed in [
23] and was tested in a number of different benchmark optimisation problems to improve the performance of the optimiser.
3.4. Glowworm Swarm Optimisation
The GSO [
24] acts on populations of
glowworms, described by Equation (
12). Each glowworm is associated with a position in the search space and a “luciferin level”
L, that is, a luminescence quantity proportional to the value of the objective function at that position:
The main goal of the GSO is to allow the glowworms to move about in the search space so that at each time step
t their luciferin level increases. To this end, each glowworm randomly selects a leading glowworm among its neighbours
with associated probabilities
that will be followed, so that neighbours with a larger luciferin level are more likely to be followed. We let the leading glowworm for glowworm
k at time
t be such that at position
, the next position of glowworm
k then becomes
where
s is a fixed step size, and
is the neighbourhood range, which is updated at each time step through
The GSO algorithm [
24] can be summarised into the following steps:
Initialise population of glowworms.
Evaluate objective function
and set the luciferin level of all glowworms using Equation (
17).
Identify neighbours and calculate associated probabilities for all glowworms using Equation (
18).
Randomly select leading glowworms according to the previously calculated probabilities.
Update glowworms’ positions using Equation (
19).
Update glowworms’ neighbourhood range using Equation (
20).
If any termination condition is met, go to the next step; otherwise repeat steps 2–7.
Retrieve the best encountered glowworm position (optimal solution) and finish.
The following termination conditions have been used:
The objective function has been evaluated more than times.
From generation and for every generations, the best fitness value has not been improved in the last generations (stagnation), where is the closest integer to .
The population size
used in this paper was 10 times the number of dimensions of
, and the following fixed parameter values were chosen:
,
,
,
,
and
. For a description of the choice of parameters, the reader is referred to [
24].
4. Case Study
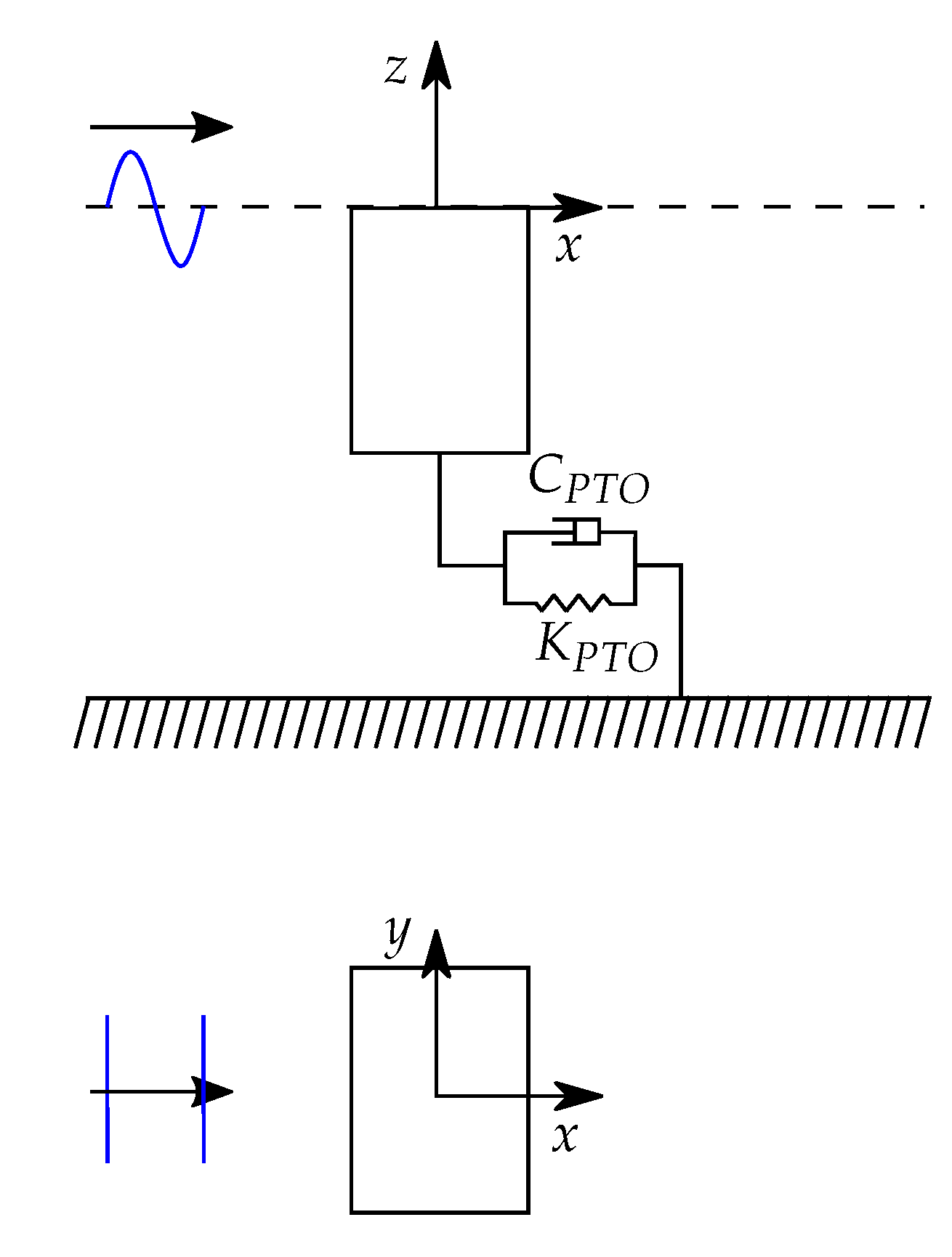
Arrays of surging barges (
Figure 3) were considered for deployment close to the island of Île d’Yeu in France, as in [
12,
13]. Optimal array layouts were sought assuming a square domain
m, a constant water depth of 50 m, and a minimum
q-factor of
. As mentioned before, the
x-direction is aligned with the propagation direction of the ambient waves and the
y-direction is perpendicular to it.
The barges had a length of 7.85 m in the
x-direction, 10 m in the
y-direction and 10 m in the vertical direction (submerged length). Further, the barges required a minimum separation distance
m. The motion of the array is described by
N modes
, where
is the complex amplitude of the oscillation along the
x-direction of barge
i. Assuming the barges were freely floating, their mass was 785 tonnes; thus, the mass matrix
tonnes, where
is the
N-by-
N identity matrix. The hydrostatic stiffness matrix
is a zero matrix. The same control strategy was assumed for all the barges; the PTO stiffness matrix was
kN·m
and the PTO damping matrix was
kN·s·m
. Both
and
were used in [
13], the first to compensate for the null restoring hydrostatic force, and the second to maximise the yearly power production of a single isolated barge at Île d’Yeu. The added mass matrix
, the radiation damping matrix
, and the diffraction force vector
were computed using the method described in [
19].
The sea states were reproduced by utilising the JONSWAP [
29] spectrum
, with a peak enhancement factor of
, and by a finite number of wave frequencies
rad·s
, where
. Thus, the part of the absorbed power in Equation (
3) due to
and
rad·s
was assumed to be negligible. The probability of occurrence over a year for each sea state
at Île d’Yeu is reported in
Table 1.
The yearly power generated by a single barge predicted by the numerical model described in
Section 2 using the specifications described in this section was 137.5 kW, and that reported in [
13] was 139 kW.
The deployment area, the minimum q-factor, the minimum separation between WECs, the WEC specifications and wave conditions considered for the case study are not specific to any wave energy project; indeed, they are intended to be as generic as possible.
6. Conclusions
In this paper, the WEC array layout optimisation strategy implemented in DTOcean’s software has been presented. This has been described on the basis of a parametrised array layout description consisting of four parameters and an optimisation algorithm, namely the CMA [
23]. In addition, two more algorithms have been introduced: a GA, which is a proven robust optimisation method [
15,
16], and the GSO [
24], which is designed to deal especially with objective functions having multiple local maxima, as in the present case. All three optimisation algorithms were tested for the case of an array of surging barges at Île d’Yeu, that is, the same case as in [
12,
13].
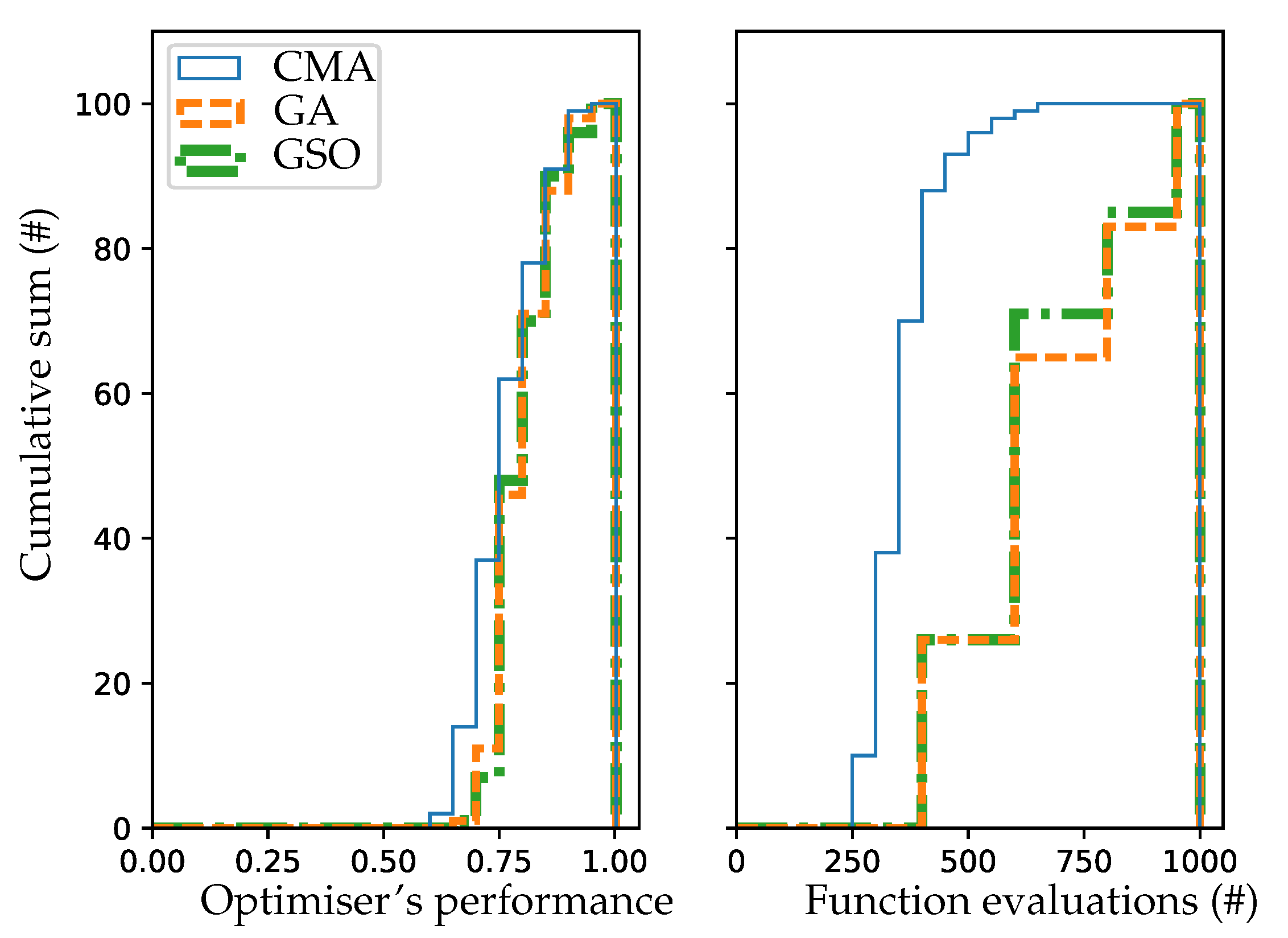
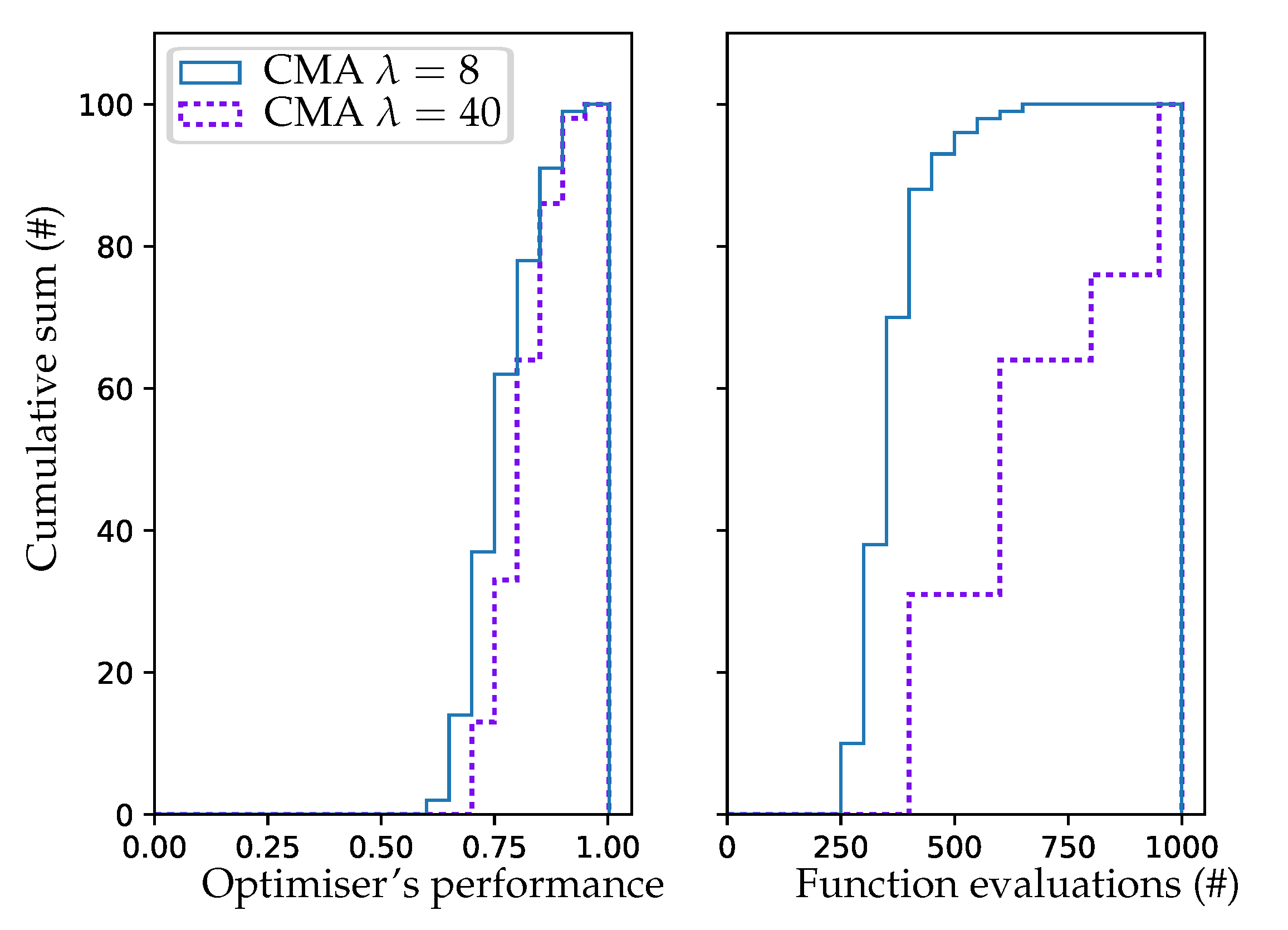
The CMA, the GA and the GSO were compared according to their performance and computational cost. Performance was measured as the ratio of the power generated by the optimiser’s optimal solution to the power generated by the best layout encountered by direct discretisation of the search space. The computational cost was measured as the number of function evaluations required by the optimiser prior to termination. On the one hand, the performances of the GA and the GSO turned out to be very similar and slightly higher than that of the CMA, while on the other hand, the CMA led to a significantly lower computational cost than the GA and the GSO, although this equalised when using similarly sized populations. Both the performance and computational cost were seen to be sensitive to the population size considered in the optimisers. For a given maximum allowed number of function evaluations, the population size could be adjusted for a better performance of the optimiser; that is, this could be increased until the optimiser was seen to systematically stop as a result of a maximum allowed number of function evaluations.
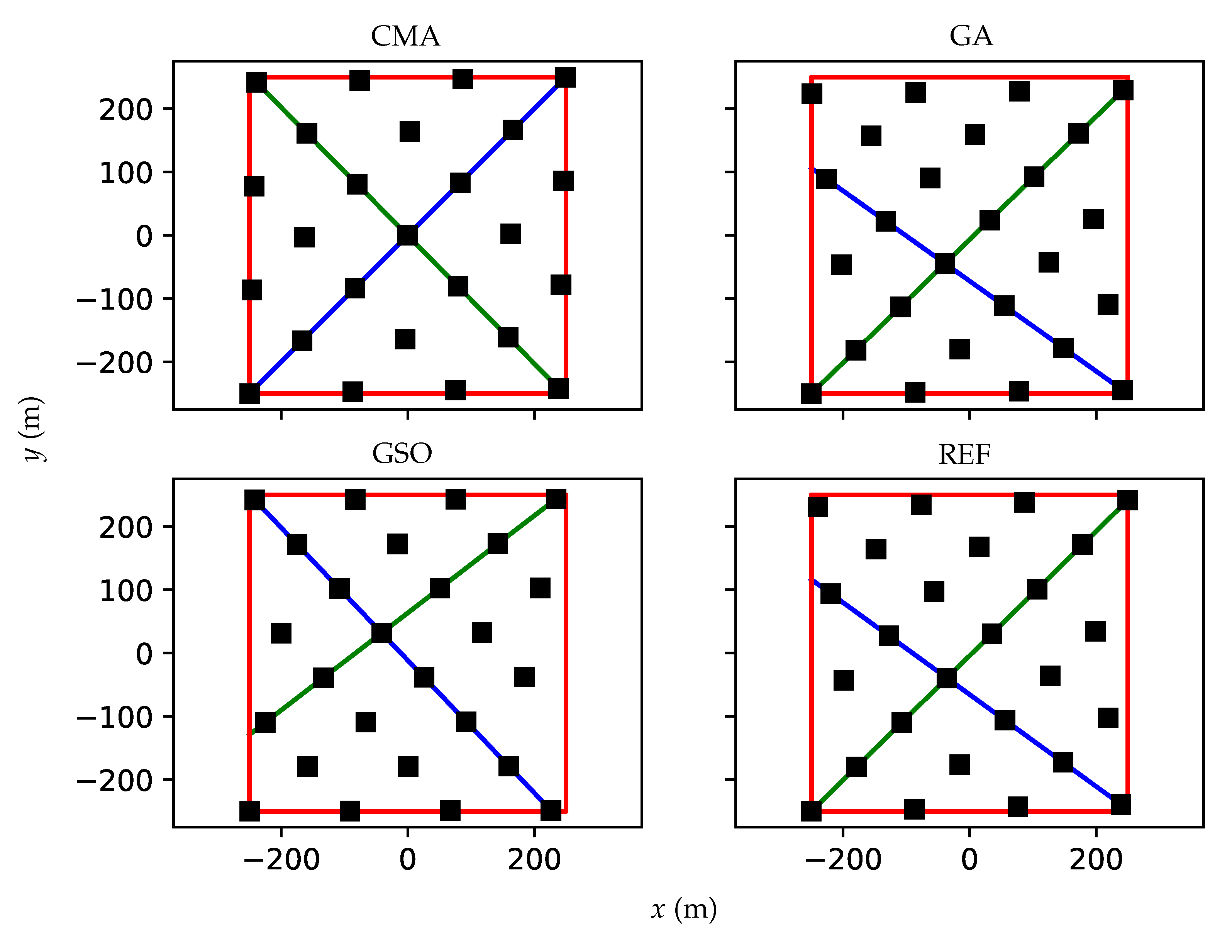
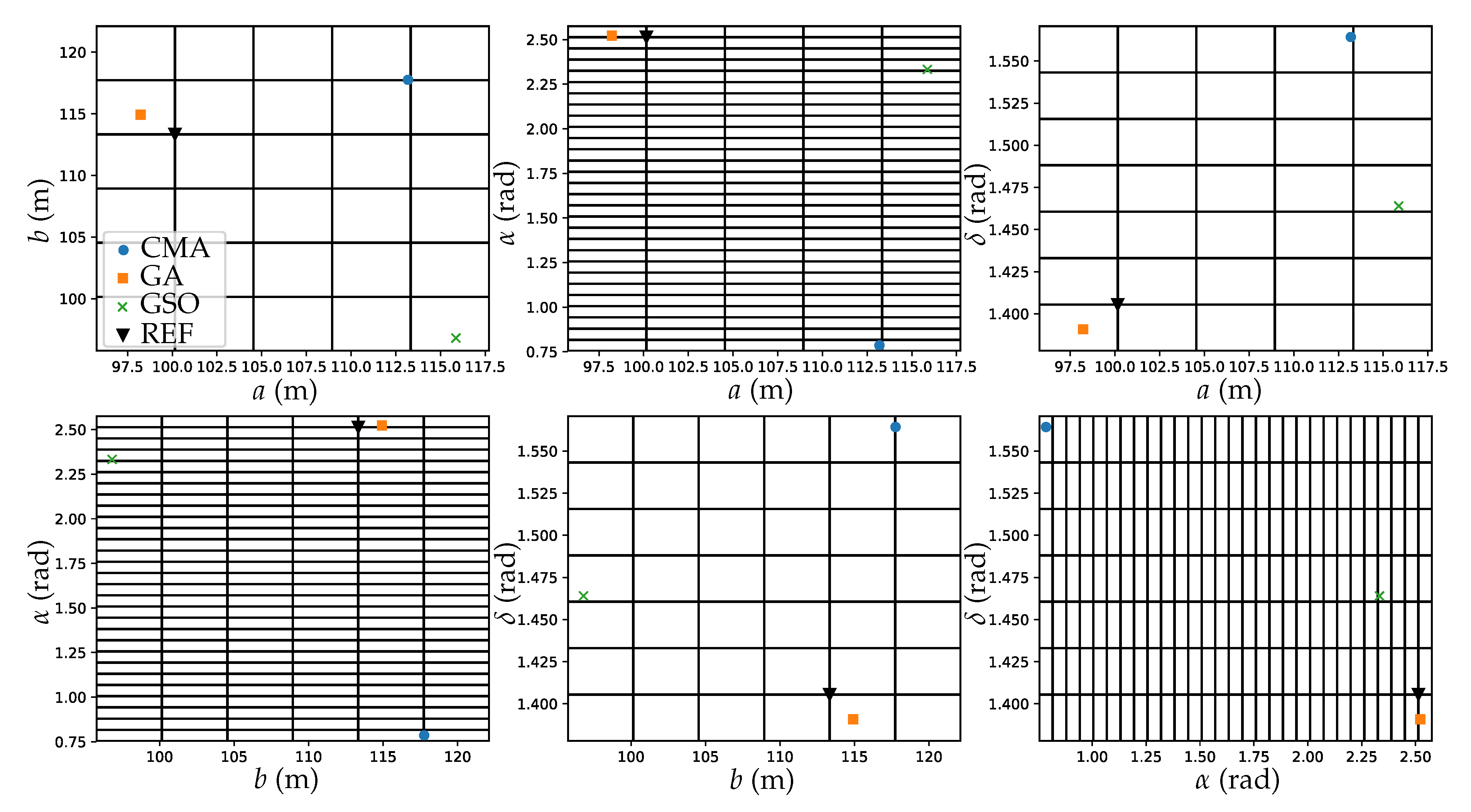
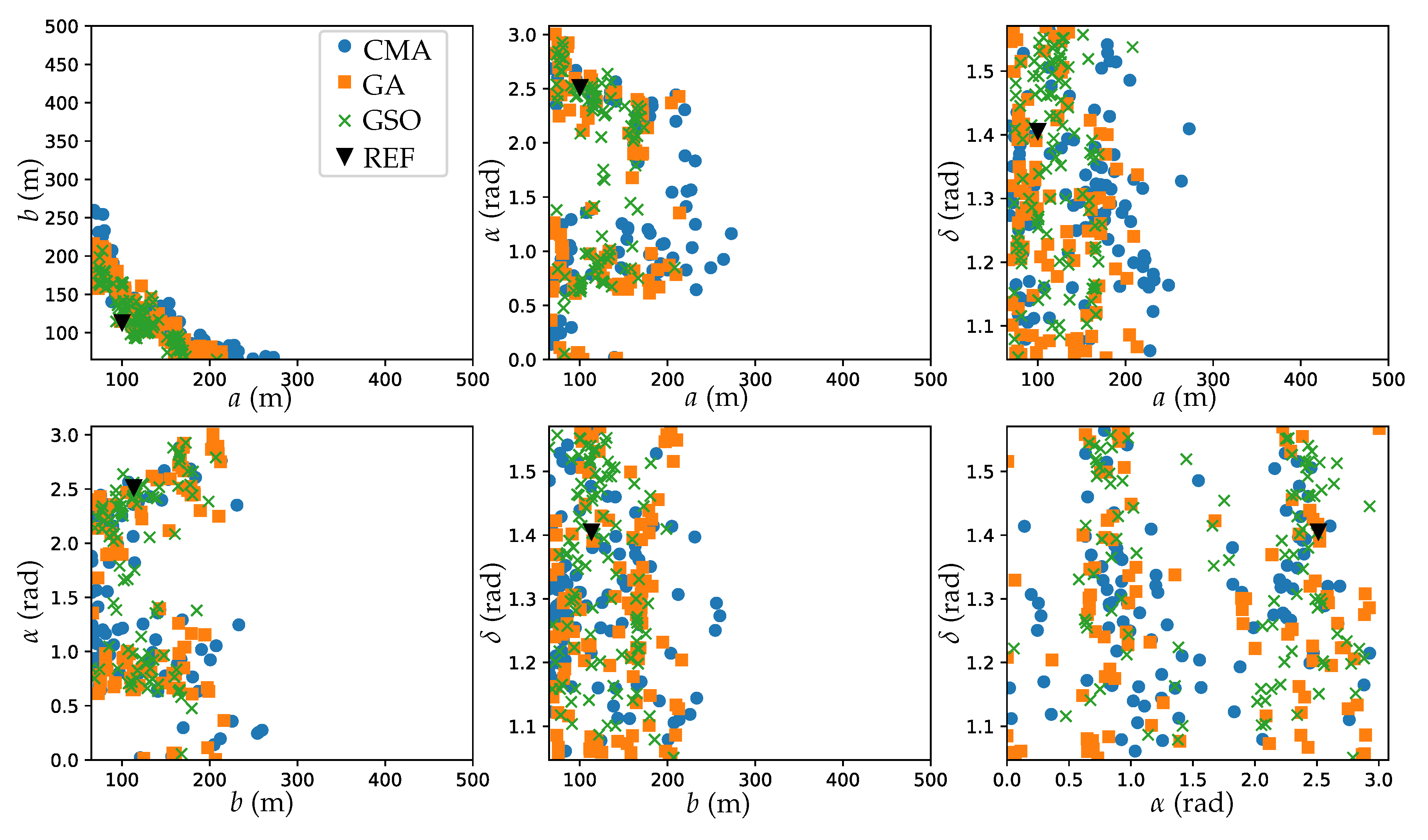
The analyses of the best array layout solutions have revealed the degree of complexity and sensitivity of the optimisation problem. Small variations along the search space have been seen to cause significant changes in the objective function’s values. Because the area of deployment is limited, when WECs are coincident to the domain limits, a small variation in the array layout parameters may cause these to leave the domain and consequently cause the total power associated with the array to drop. Moreover, because a minimum q-factor is imposed, when array layouts are close to the constraint, forming the region in which it turns out optimal solutions tend to be, small variations in the array layout parameters may cause the array layouts to become infeasible.
Finally, observations of optimal array layout solutions have confirmed that these are likely to be found close to the limit between feasible and infeasible layouts. In this regard, significant improvements in terms of performance and computational cost could be achieved if the optimiser has only to search within that region. As this behaviour is expected regardless of the type of WEC, this could be further used to improve the implementation of the CMA algorithm or to develop a more effective optimisation algorithm.

 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}